首页
学报概况
学报简介
编辑部
编委简介
期刊在线
优先发表
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
作者园地
修改格式
报道计划
征稿启事
投稿流程
摘要写作
投稿模版
科学研究
科研院所
研究前沿
研究动态
学术会议
重大项目
招标信息
政策法规
科研不端处理
期刊编辑出版规范
出版管理条例
期刊出版规定
出版伦理
期刊订阅
联系我们
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
学报概况
学报简介
编辑部
编委简介
期刊在线
优先发表
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
作者园地
修改格式
报道计划
征稿启事
投稿流程
摘要写作
投稿模版
科学研究
科研院所
研究前沿
研究动态
学术会议
重大项目
招标信息
政策法规
科研不端处理
期刊编辑出版规范
出版管理条例
期刊出版规定
出版伦理
期刊订阅
联系我们
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投搞
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 双月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
重要源期刊收录
更多>
美国《工程索引》(Ei)
荷兰《斯高帕斯数据库》(Scopus)
美国《剑桥科学文摘:工程技术》(CSA:Technology)
《日本科学技术振兴机构中国文献数据库》(JST)
英国《物理学、电技术、计算机及控制信息社数据库》(INSPEC)
波兰《哥白尼索引》(IC)
邮件订阅
RSS
2015年 第15卷 第5期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
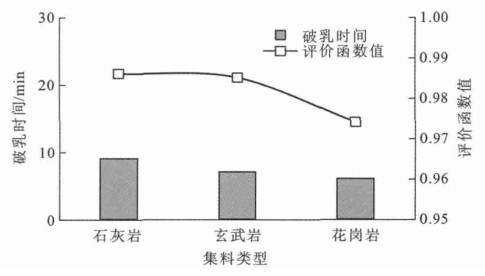
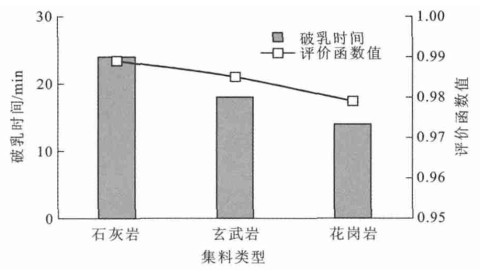
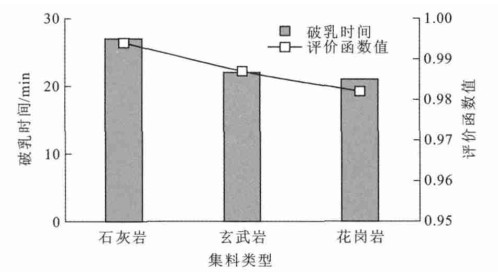
基于龚帕斯模型的改性乳化沥青胶浆黏度与沥青破乳评价
张久鹏
,
朱红斌
,
裴建中
,
罗资军
摘要:
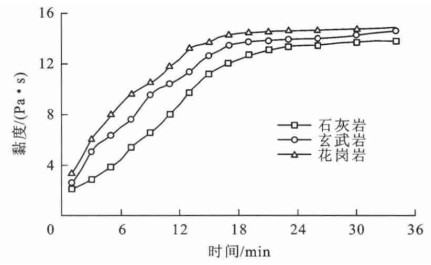
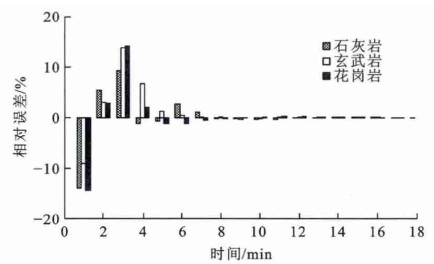
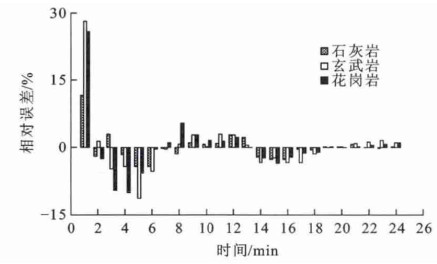
针对改性乳化沥青破乳时间难以量化评价的不足, 采用不同类型的细集料与改性乳化沥青制备了改性乳化沥青胶浆, 运用龚帕斯模型分析了其黏度随时间的变化规律, 并建立了准确评价改性乳化沥青破乳的数学模型。研究结果表明: 改性乳化沥青胶浆初始黏度较低, 随沥青破乳时间的增大而不断增大, 最后趋于稳定; 当集料粒径相同时, 花岗岩改性乳化沥青胶浆的黏度最大, 玄武岩胶浆的黏度次之, 而石灰岩胶浆的黏度最小, 但黏度增长速率基本相同, 符合生长曲线的特征; 龚帕斯模型可以较好地反映胶浆黏度随时间的变化规律, 计算值与实测值的最大相对误差小于15%; 当根据龚帕斯模型建立的沥青破乳评价指标值为0.97~1.00时, 胶浆黏度变化趋于平稳, 此时改性乳化沥青已经完全破乳; 反之, 也可以根据黏度试验结果计算龚帕斯模型参数, 预测改性乳化沥青破乳时间。
更多>
2015, 15(5): 1-7.
doi:
10.19818/j.cnki.1671-1637.2015.05.001
摘要
(
872
)
HTML
(
104
)
PDF (494KB)
(
981
)
引用
(
)
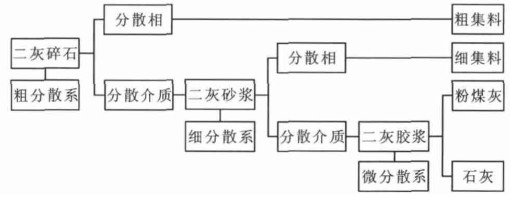
基于胶浆原理的二灰碎石设计方法
蒋应军
,
富志鹏
,
李宁方
摘要:
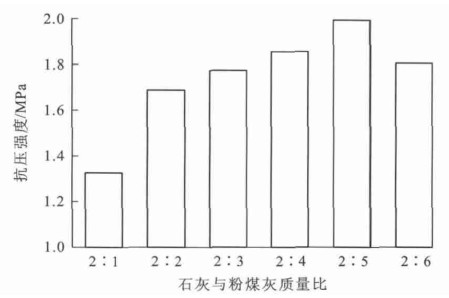
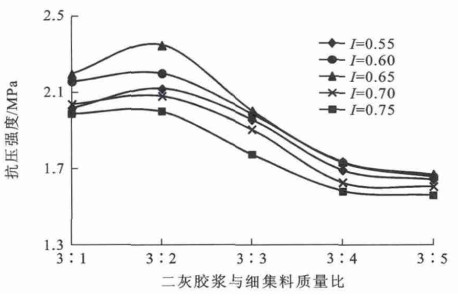
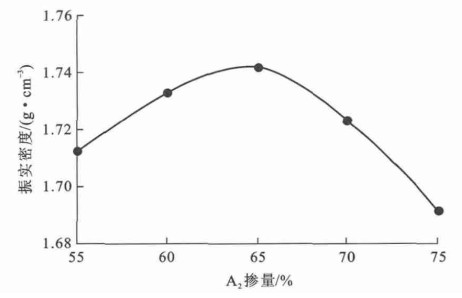
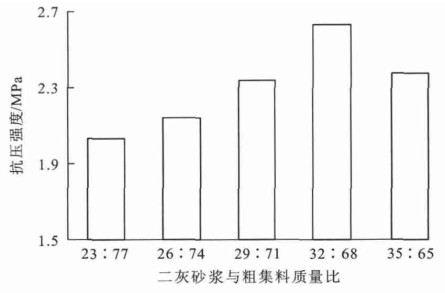
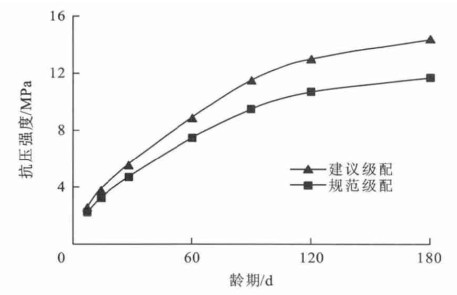
为了提高二灰碎石力学强度, 假设二灰碎石为一种三级空间网状结构的分散系, 即微分散系二灰胶浆、细分散系二灰砂浆与粗分散系二灰碎石。基于抗压强度最优原则, 采用垂直振动试验方法(VVTM)确定二灰胶浆与二灰砂浆质量比, 基于密度最大原则, 采用逐级填充法确定粗集料级配, 基于抗压强度最优原则, 确定二灰碎石中二灰砂浆用量。提出了基于胶浆原理的二灰碎石组成设计方法, 并通过室内试验与现场试验对设计方法进行性能验证。验证结果表明: 当石灰与粉煤灰质量比为2:5时, 二灰胶浆力学性能和收缩性能最佳; 当细集料质量通过率的递减系数为0.65, 二灰与细集料质量比为3:2时, 二灰砂浆力学强度最大; 当粒径范围分别为19~37.5、9.5~19、4.75~9.5 mm的集料质量比为17:11:6时, 混合粗集料密度最大; 与传统方法设计的二灰碎石试件力学强度相比, 基于胶浆原理设计的试件早期(7 d)力学强度提高10%以上, 后期(180 d)力学强度提高20%以上; 不同龄期的VVTM试件与现场芯样抗压强度之比平均为0.909, 劈裂强度之比平均为0.904, 而静压成型试件与现场芯样抗压强度之比为0.457, 劈裂强度之比为0.531, 说明VVTM比静压法设计二灰碎石更科学。
更多>
2015, 15(5): 8-14.
doi:
10.19818/j.cnki.1671-1637.2015.05.002
摘要
(
483
)
HTML
(
93
)
PDF (507KB)
(
751
)
引用
(
)
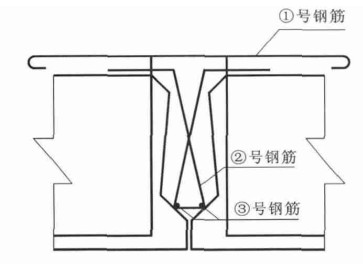
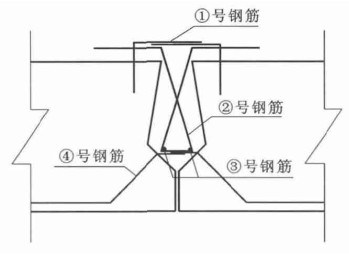
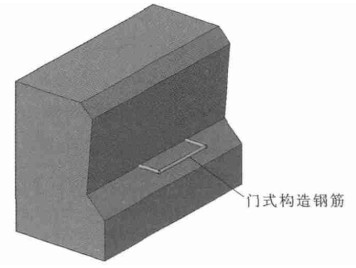
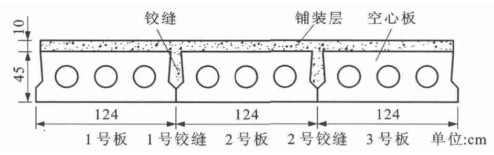
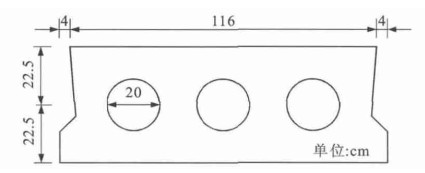
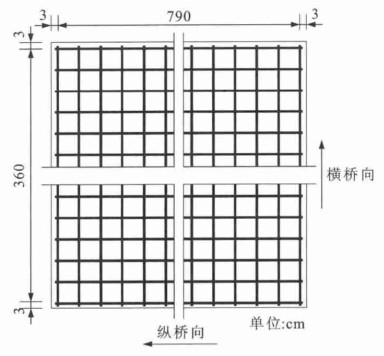
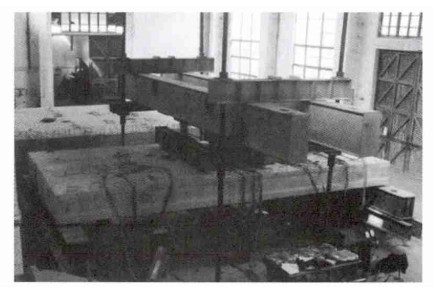
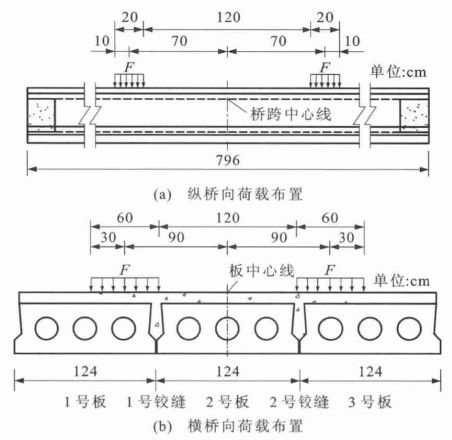
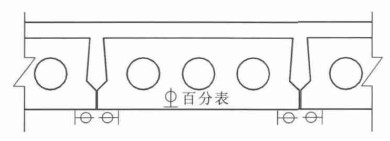
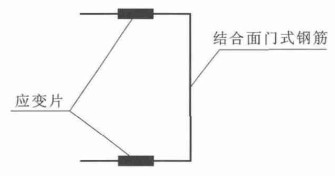
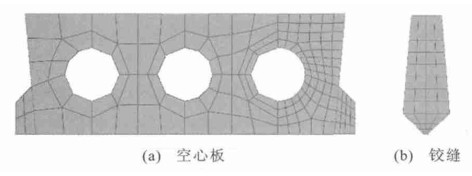
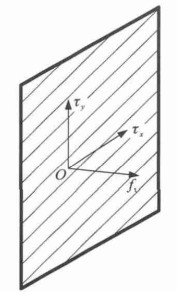
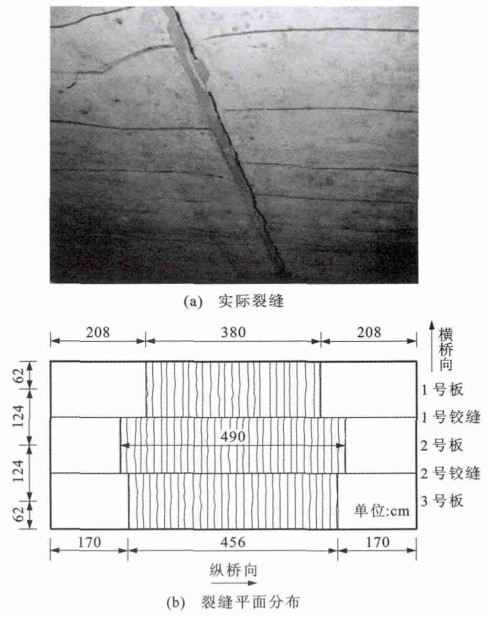
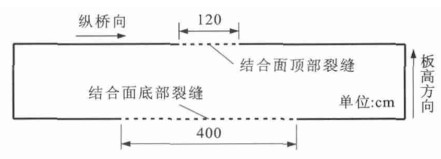
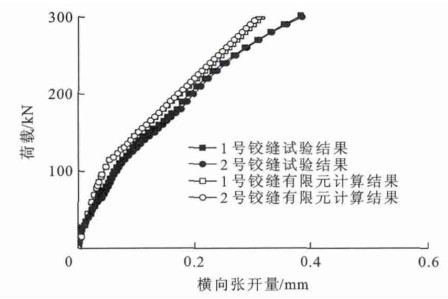
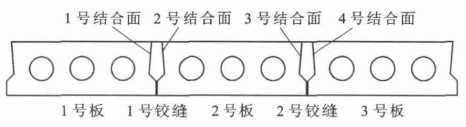
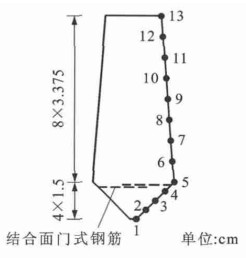
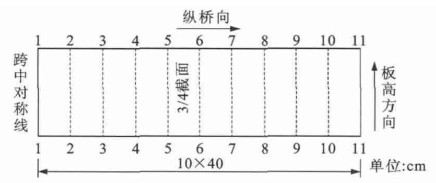
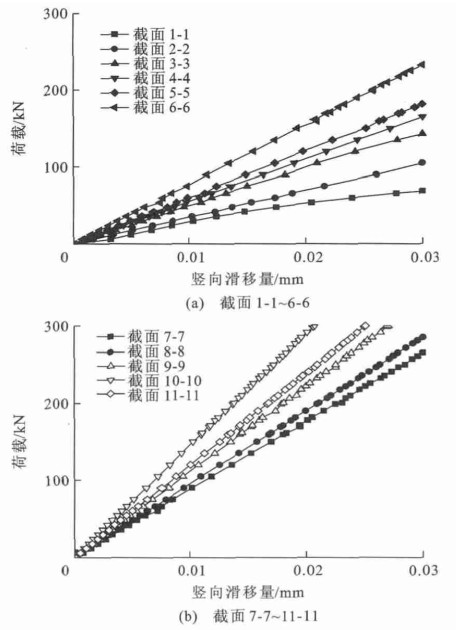
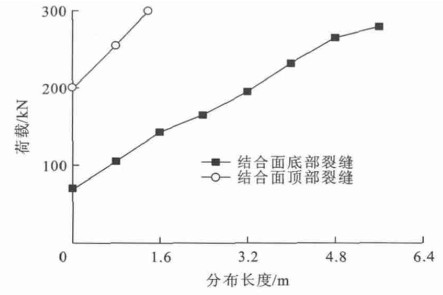
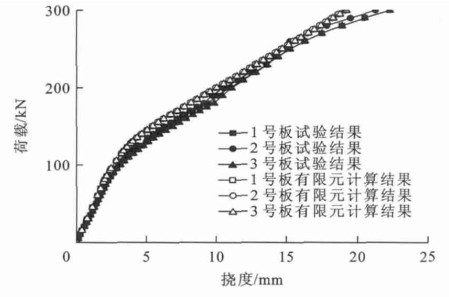
结合面底部带门式钢筋的铰接空心板破坏模式分析
吴庆雄
,
陈悦驰
,
陈康明
摘要:
以在空心板与铰缝构造结合面底部布设门式钢筋的深铰缝构造为研究对象, 参照2007年交通运输部颁布的装配式空心板桥标准图, 设计了一跨8 m足尺模型, 通过试验和非线性有限元法分析了车辆荷载作用下铰接空心板破坏类型、破坏位置与开裂荷载等破坏模式。分析结果表明: 试验验证了铰接空心板非线性有限元模型能较好地模拟铰接空心板在车辆荷载作用下的受力性能; 在空心板与铰缝结合面的三个方向的黏结滑移关系中, 应以竖向相对滑移量作为结合面黏结破坏失效的指标; 在车辆荷载作用下, 空心板与铰缝结合面是最薄弱的受力部位, 当荷载达到69 kN(0.99倍车辆荷载)时, 空心板与铰缝结合面底部开裂, 但当荷载达到85 kN(1.21倍车辆荷载)时, 空心板跨中截面底部才出现横向裂缝; 与在结合面底部不设门式钢筋的空心板相比, 在结合面底部设置门式钢筋后虽不能明显提高铰缝构造的开裂荷载, 但可以将铰缝通缝荷载从140 kN(2.00倍车辆荷载)提高至199 kN(2.84倍车辆荷载), 且不出现贯通的纵桥向裂缝。
更多>
2015, 15(5): 15-25.
doi:
10.19818/j.cnki.1671-1637.2015.05.003
摘要
(
668
)
HTML
(
134
)
PDF (1106KB)
(
675
)
引用
(
)
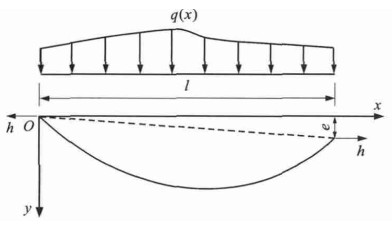
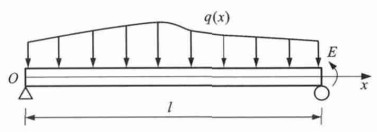
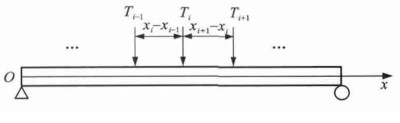
悬索桥主缆和短吊杆轴力计算方法
曾森
,
马新伟
,
陈少峰
摘要:
为解决短吊杆轴力难以用频率法确定的问题, 提出了确定悬索桥主缆和短吊杆轴力的节点平衡法和比拟法。节点平衡法以吊点为分析对象建立以主缆轴力为未知量的超定平衡方程组, 从而获取主缆轴力的最小二乘解, 并进一步确定短吊杆轴力。比拟法基于长吊杆轴力与简支梁弯矩间关系, 建立主缆线形与长吊杆轴力的关系方程, 最终确定主缆的水平张力与短吊杆的轴力。以贵州南盘江悬索桥为例, 分别应用节点平衡法和比拟法得出主缆张力和吊杆轴力。计算结果表明: 2种方法的计算值与频率法实测值相近, 节点平衡法所得主缆张力误差为-4.3%(上游)和3.1%(下游), 比拟法所得主缆张力误差为-8.6%(上游)和-0.1%(下游); 2种方法所得长吊杆轴力最大误差约为10%, 上游吊杆轴力平均误差小于2%, 下游吊杆轴力平均误差约为9%。可见, 节点平衡法和比拟法是确定主缆和短吊杆轴力的有效方法。
更多>
2015, 15(5): 26-33.
doi:
10.19818/j.cnki.1671-1637.2015.05.004
摘要
(
701
)
HTML
(
113
)
PDF (490KB)
(
1057
)
引用
(
)
载运工具运用工程
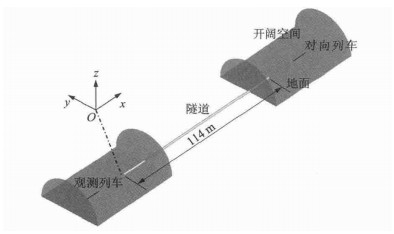
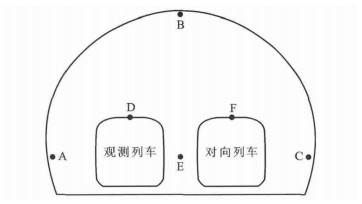
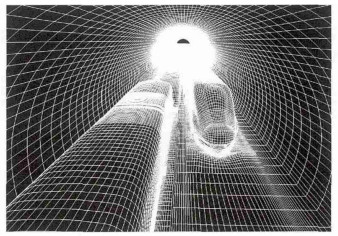
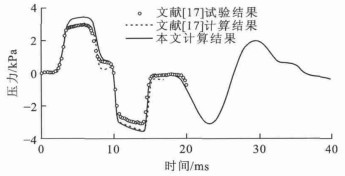
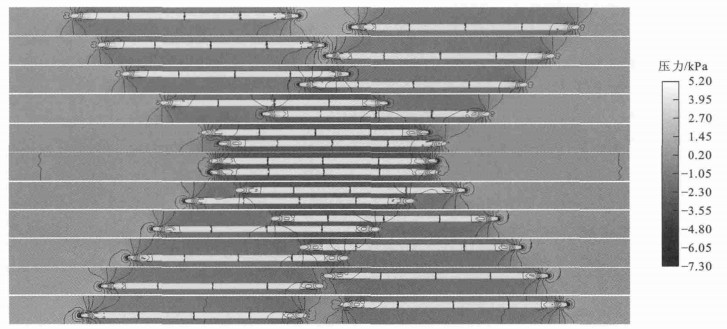
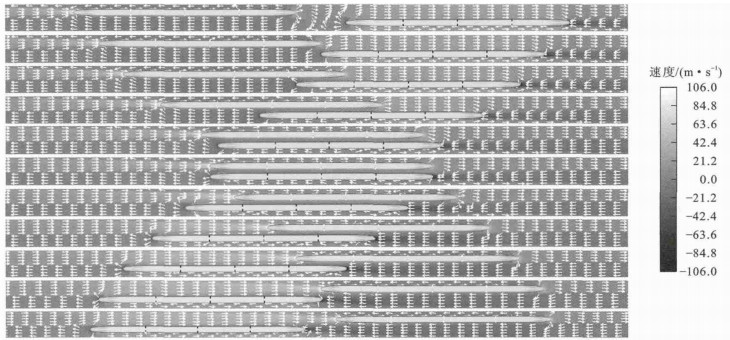
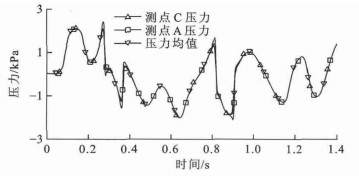
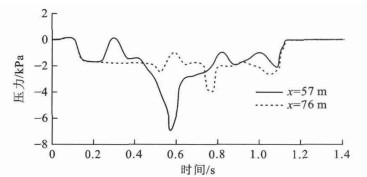
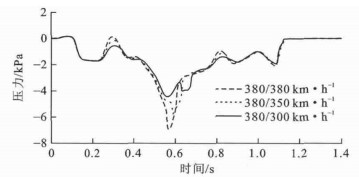
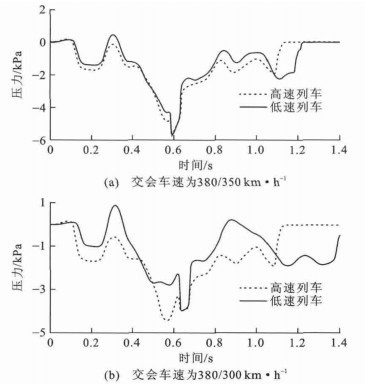
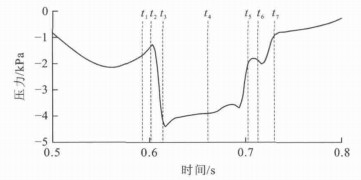
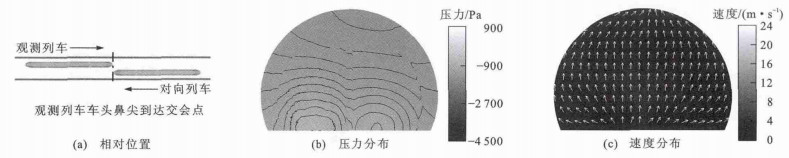
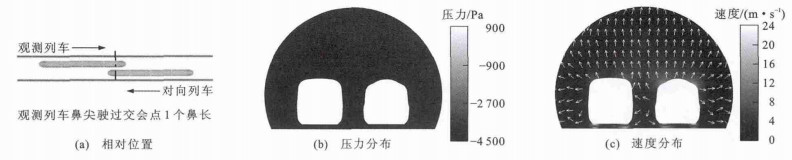
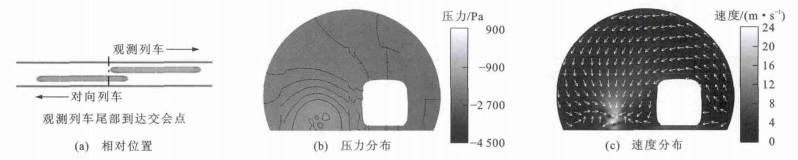
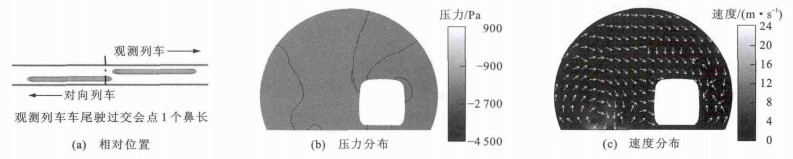
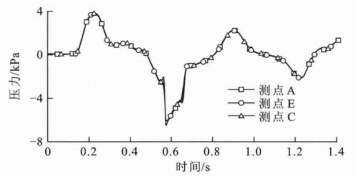
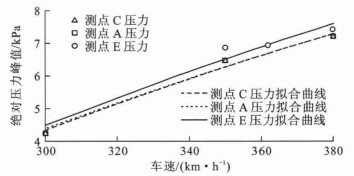
高速列车隧道交会压力波特性
梅元贵
,
孙建成
,
许建林
,
周朝晖
摘要:
采用基于有限体积方法的计算流体力学软件, 建立了列车几何模型和非定常可压缩湍流的三维流动模型, 对高速列车隧道内等速和不等速交会的全过程进行了数值模拟。在软件的任意滑移界面动网格技术中嵌入了列车光滑启动方法, 研究了列车交会过程中隧道断面的压力波动、流速变化和压力波的形成过程。研究结果表明: 基于三维流动模型的计算结果能够清晰地展示高速列车隧道内交会时的压力场与速度场变化情况, 同一隧道横截面上各点的压力波动趋势与断面压力均值的波动趋势虽然一致, 但不同测点的压力差异较大, 最大可达53.5%;等速交会时隧道中央的交会压力变化幅值最大, 负压峰值达到约-7kPa; 不等速交会时高速列车车体正压峰值与负压峰值均随低速列车速度的减小而减小, 而低速列车比高速列车的正压峰值大约1.5kPa; 两列车鼻尖交会处的隧道断面压力波负压峰值与低速列车速度的二次方近似成正比。
更多>
2015, 15(5): 34-43.
doi:
10.19818/j.cnki.1671-1637.2015.05.005
摘要
(
649
)
HTML
(
105
)
PDF (1261KB)
(
850
)
引用
(
)
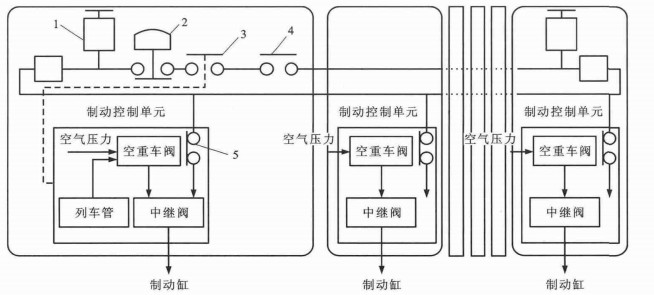
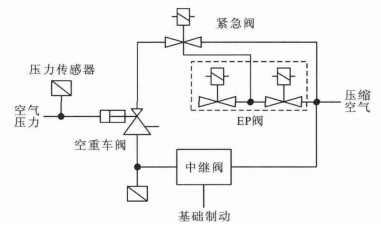
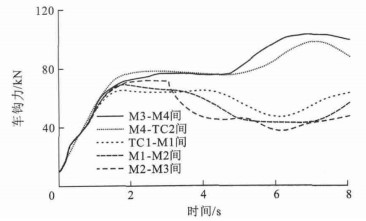
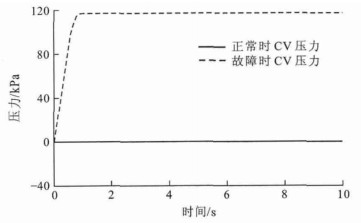
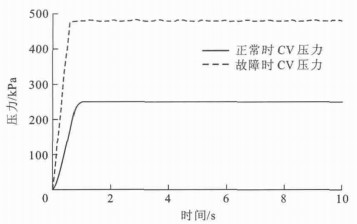
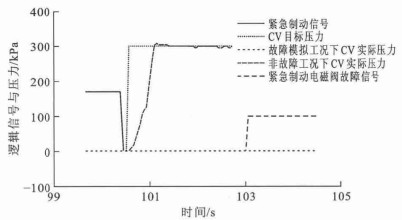
地铁列车紧急制动故障特征再现仿真
左建勇
,
韩飞
,
胡薇
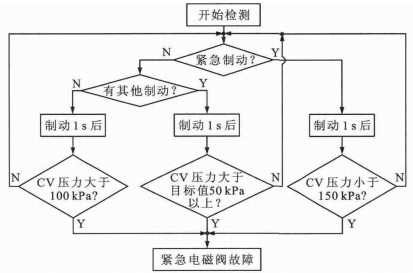
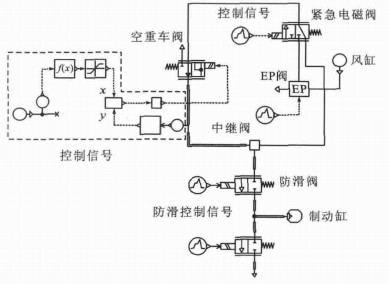
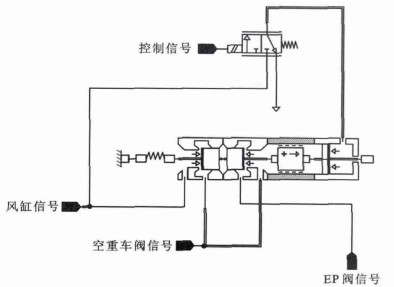
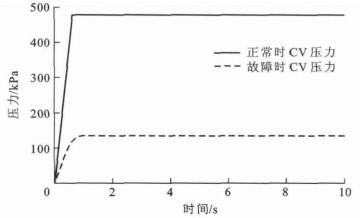
摘要:
介绍了地铁列车紧急制动环路工作原理与紧急制动气动系统特点, 提出了以综合制动指令和中继阀容积室压力为参数的紧急电磁阀故障特征判定法则, 分析了有紧急制动指令时紧急制动不施加、无紧急制动指令时紧急制动异常触发与无紧急制动指令时的中继阀容积室压力异常3类紧急电磁阀故障特征, 研究了紧急电磁阀的故障诊断流程, 运用AMESim软件建立了制动系统仿真模型, 基于故障再现的模型驱动仿真法模拟了3类紧急电磁阀故障, 并在气路控制试验台上进行了第1类故障对比试验。试验结果表明: 在正常情况下触发紧急制动信号时, 中继阀容积室压力延时1.1s后达到目标压力; 人为断开紧急电磁阀信号线并触发紧急制动信号时, 中继阀容积室压力为0, 并维持不变, 2.6s后系统报警紧急电磁阀故障。可见, 运用AMESim建立的制动系统模型能有效再现紧急制动的故障特征, 以制动指令与中继阀容积室压力为参数的紧急制动故障识别分析方法可用于紧急制动在途故障监测与服役性能跟踪。
更多>
2015, 15(5): 44-49.
doi:
10.19818/j.cnki.1671-1637.2015.05.006
摘要
(
607
)
HTML
(
70
)
PDF (622KB)
(
821
)
引用
(
)
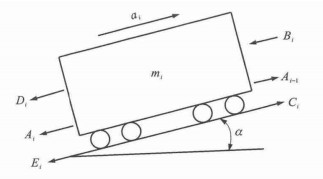
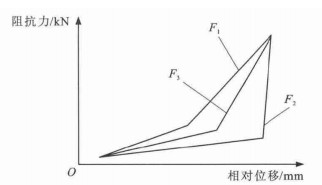
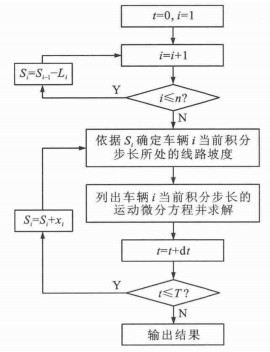
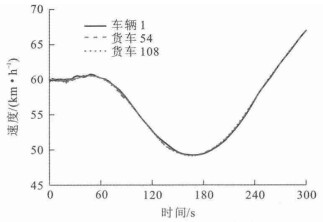
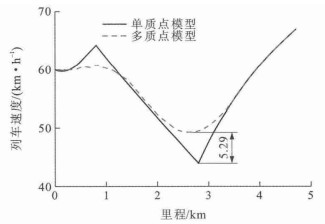
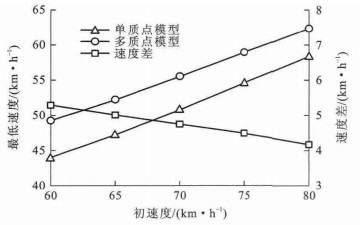
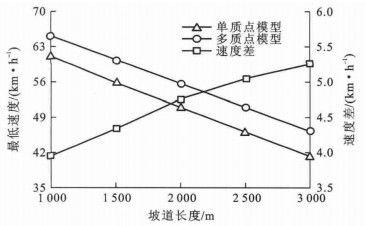
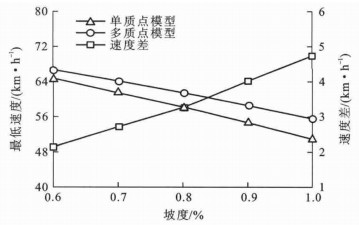
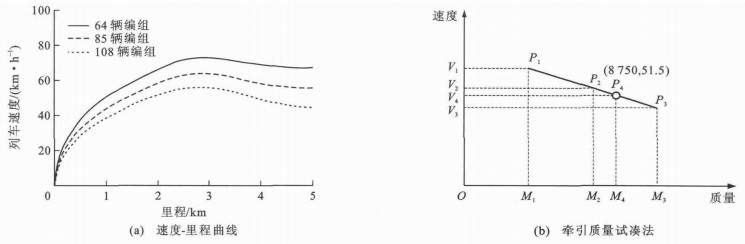
基于多质点模型的重载列车动能闯坡性能
王开云
,
黄超
摘要:
采用列车多质点纵向动力学模型, 研究了列车初速度、列车编组、坡道长度与坡度对列车动能闯坡性能的影响, 并与列车单质点模型进行了对比分析, 然后结合具体算例对比了2种模型在动能闯坡最大牵引质量方面的差异。分析结果表明: 列车闯坡初速度越大, 闯坡性能越优; 列车闯坡性能随列车编组、坡道长度与坡度的增大而变差; 2种模型列车闯坡最低速度的差异随列车闯坡初速度的减小而增加, 初速度为60km·h
-1
时单质点与多质点模型的列车闯坡最低速度相差5.29km·h
-1
; 列车编组、坡长与坡度越大, 单质点模型的计算结果越保守; 基于单质点模型的列车最大牵引质量为8 250t, 基于多质点模型的列车最大牵引质量为8 750t, 后者比前者增加了6.1%;建议采用列车多质点纵向动力学模型计算列车动能闯坡最大牵引质量。
更多>
2015, 15(5): 50-56.
doi:
10.19818/j.cnki.1671-1637.2015.05.007
摘要
(
484
)
HTML
(
78
)
PDF (605KB)
(
688
)
引用
(
)
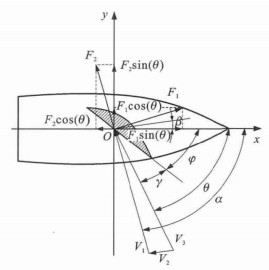
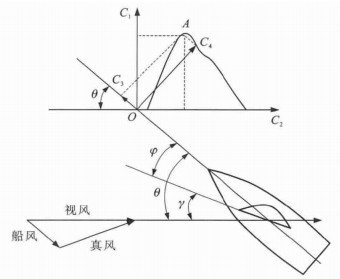
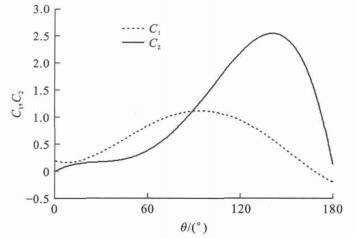
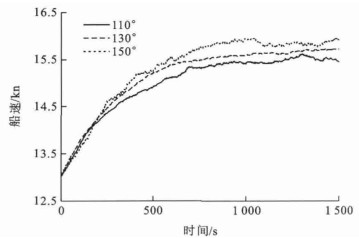
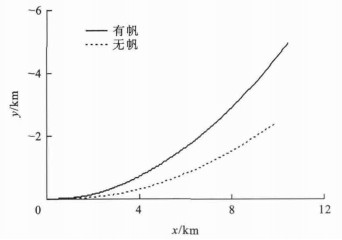
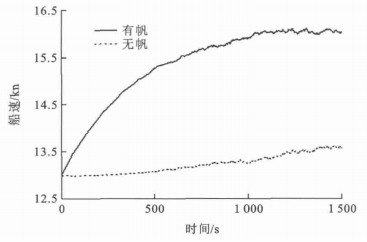
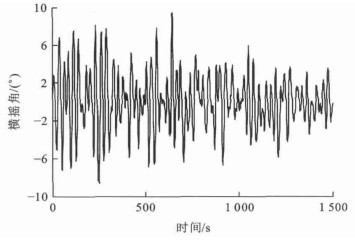
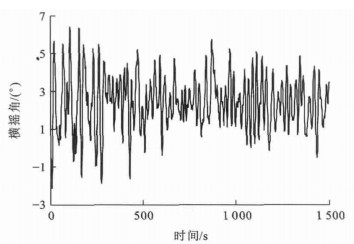
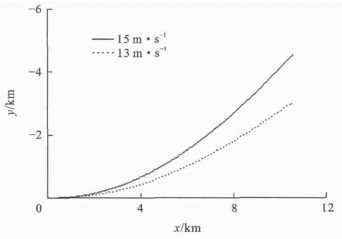
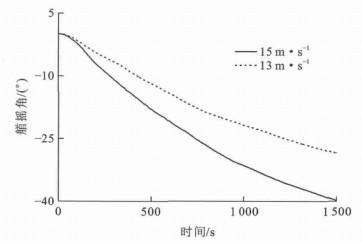
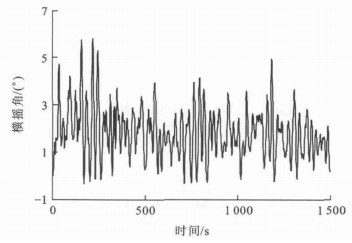
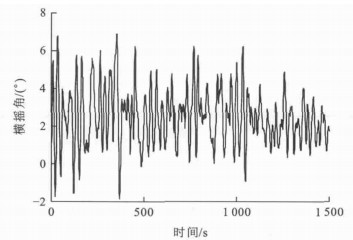
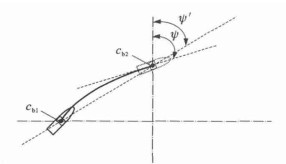
风帆助航船舶运动模型
沈智鹏
,
姜仲昊
摘要:
分析了处于复杂环境下的风帆受力, 给出了风帆在最佳攻角下的受力函数。基于船舶运动与主机转速之间的耦合关系, 得出了船舶主机输出转矩与油门杆位置的拟合函数。以76 000DWT大型远洋散货船“文竹海”号为研究对象, 根据实船参数建立了4自由度的风帆助航船舶运动模型。仿真结果表明: 添加风帆后船舶速度增大, 横摇角减小, 但偏航增加。添加风帆后, 在相同时间内船舶行驶的里程、最佳攻角下的船速与横摇幅度都随风速的增大而增大, 但横摇角小于15°, 在安全范围之内。可见, 船舶运动模型符合实际船舶运动规律, 是有效的。
更多>
2015, 15(5): 57-64.
doi:
10.19818/j.cnki.1671-1637.2015.05.008
摘要
(
714
)
HTML
(
110
)
PDF (626KB)
(
724
)
引用
(
)
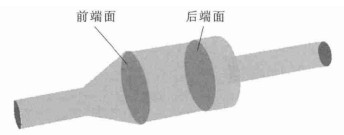
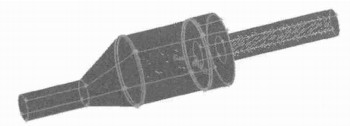
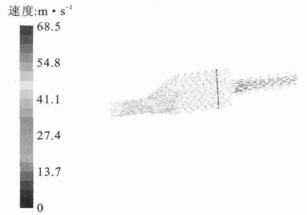
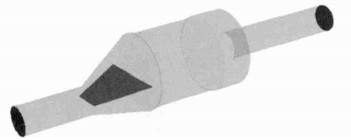
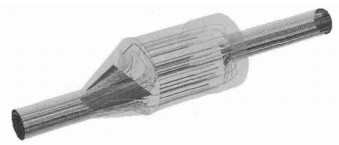
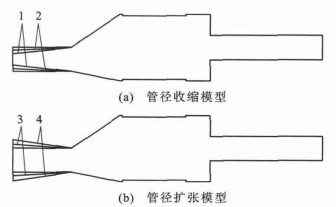
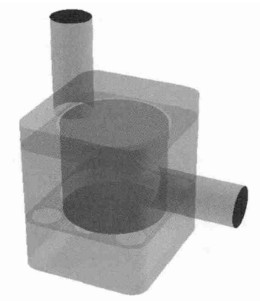
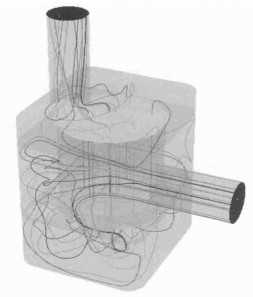
中重型卡车催化消声器流场特性
徐晓明
,
江浩斌
,
宫燃
摘要:
运用Fluent软件计算了不同进气端结构和形状的中重型卡车催化消声器载体前端面进气均匀性和进出口总压差, 分析了其流场特性。计算结果表明: 催化消声器流场特性与发动机排气量有关, 载体前端面进气均匀性和进出口总压差对于分析流场特性至关重要; 添加挡板后载体前端面进气均匀性和进出口总压差均增大, 添加竖挡板的流场特性最佳; 进气管直径收缩40mm和排气管直径扩张40mm的流场特性较好; 当发动机转速分别为900、1 900r·min
-1
时, 催化消声器优化后载体前端面进气均匀性比优化前分别提高了1.2%、1.6%, 进出口总压差比优化前分别降低了57.5%、63.9%, 结构优化对降低进出口总压差效果明显; 与桶型催化消声器相比, 箱型催化消声器的载体前端面进气均匀性增加; 选择催化消声器还应考虑空间布置与利用效率。
更多>
2015, 15(5): 65-71.
doi:
10.19818/j.cnki.1671-1637.2015.05.009
摘要
(
489
)
HTML
(
127
)
PDF (490KB)
(
629
)
引用
(
)
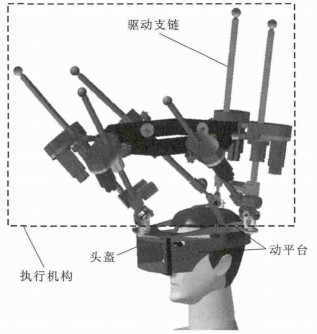
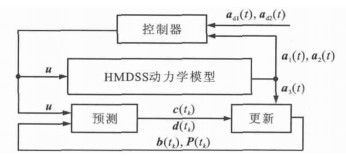
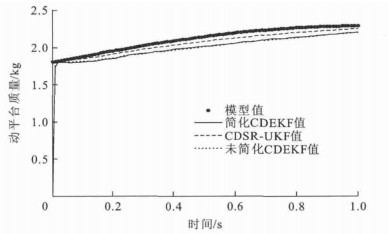
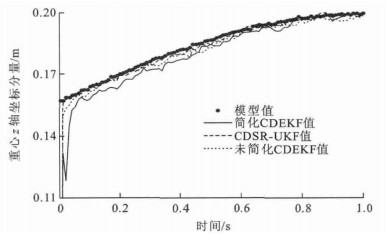
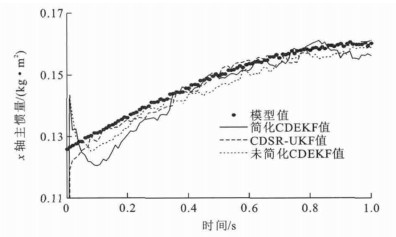
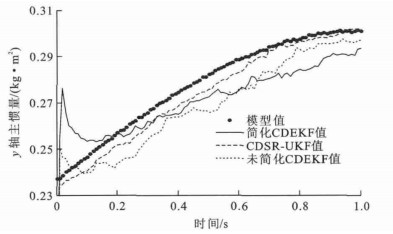
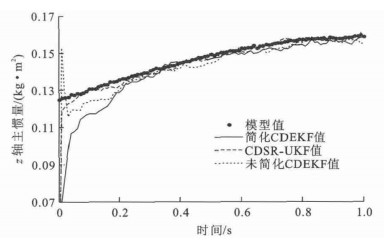
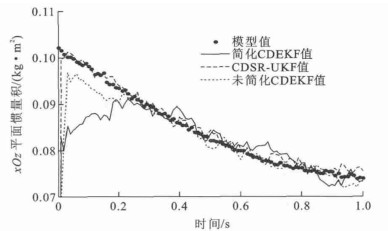
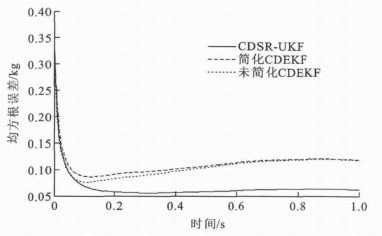
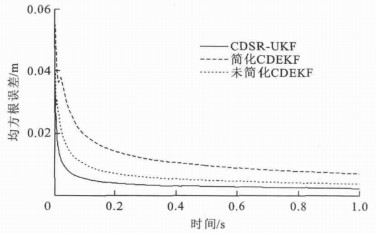
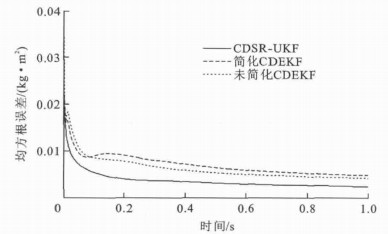
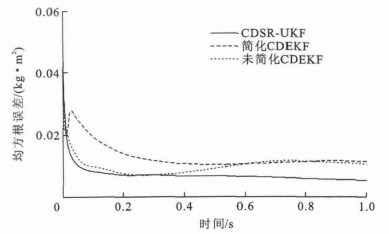
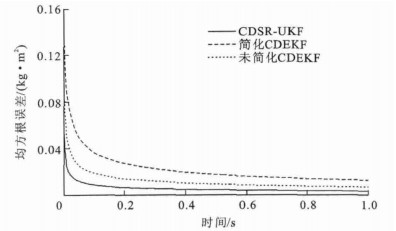
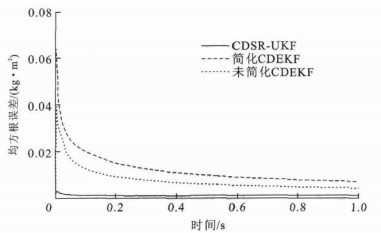
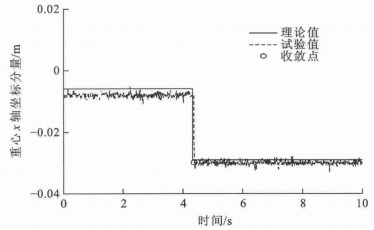
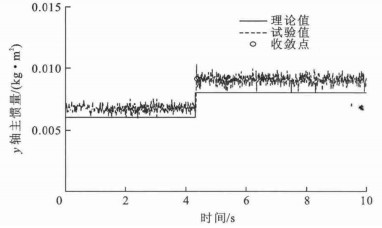
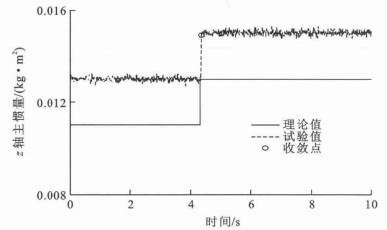
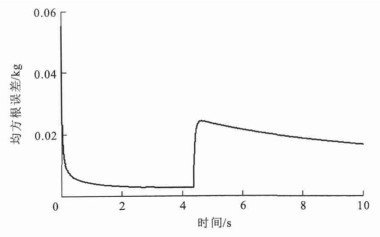
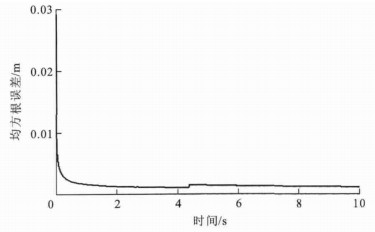
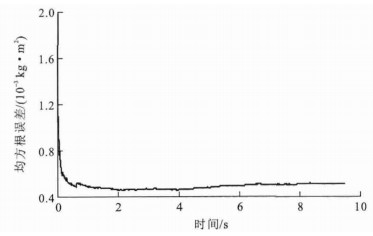
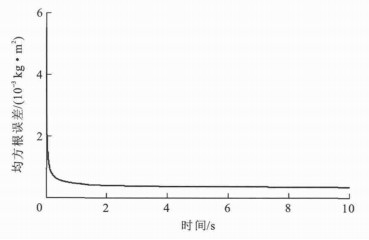
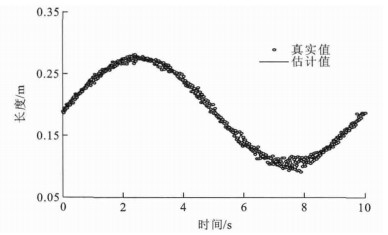
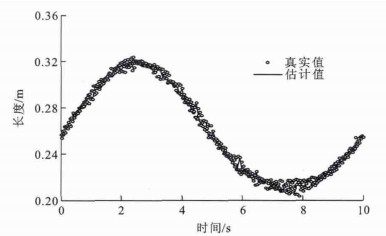
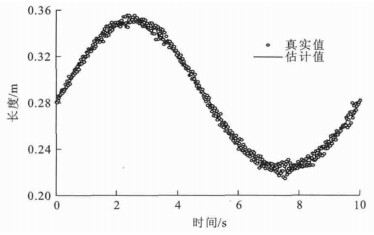
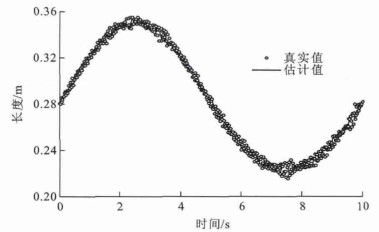
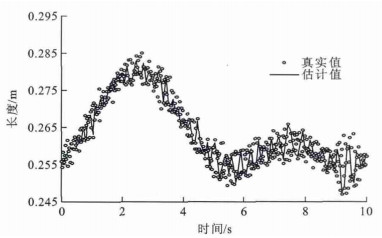
头盔显示器伺服系统动平台参数辨识方法
李鹏
,
顾宏斌
,
吴东苏
摘要:
分析了头盔显示器伺服系统动平台参数的不确定性与时变性, 推导了连续-离散扩展卡尔曼滤波(CDEKF)与连续-离散平方根无味卡尔曼滤波(CDSR-UKF)的辨识过程, 结合头盔显示器伺服系统的动力学模型建立了系统动平台参数的辨识模型, 并通过仿真试验对比分析了CDEKF和CDSRUKF的辨识效果。设计了动平台参数的突变试验过程, 通过试验对CDSR-UKF的实用性进行了检验。仿真结果表明: CDEKF与CDSR-UKF的标准误差比值范围为1.9~6.3, 收敛时间比值范围为1.0~27.7, 均方根误差的比值范围为1.4~11.0, 后者的计算精度、稳定性和收敛速度均要优于前者, 且后者的平均收敛时间约为0.002s, 具有较好的在线辨识性能; CDSR-UKF的辨识误差小于10%, 对大幅度突变和一般幅度突变参数的辨识收敛时间分别约为0.30s和0.04s, 能较好地跟踪参数的变化过程, 可满足正常使用情况下的头盔显示器伺服系统动平台参数辨识要求。
更多>
2015, 15(5): 72-84.
doi:
10.19818/j.cnki.1671-1637.2015.05.010
摘要
(
498
)
HTML
(
131
)
PDF (1129KB)
(
601
)
引用
(
)
交通运输规划与管理
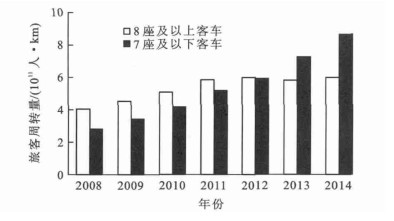
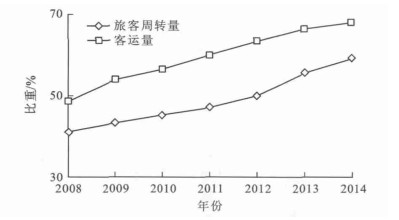
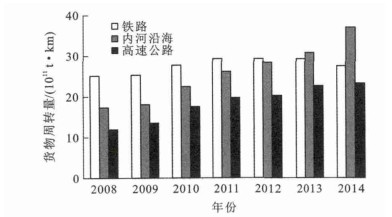
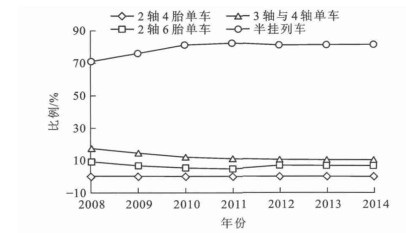
基于大数据的高速公路运输趋势分析
肖润谋
,
李彬
,
陈荫三
摘要:
以中国高速公路联网收费系统数据库为主, 辅以收费站典型抽样调查数据, 分析了2008~2014年中国高速公路网运输量变化趋势。分析结果表明: 2008年以来高速公路客车行驶量比重始终维持在58%~69%。乘用车旅客出行量的持续增长带动旅客运输量继续攀升, 2014年高速公路客运量为1.67×10
10
人次, 同比增长14.99%, 6年(2009~2014)年均增长15.21%。旅客周转量达到1.47×10
12
人·km, 同比增长12.07%, 6年年均增长13.57%, 客运量增速远超货运量增速的趋势将会进一步加强。受宏观经济影响, 2014年中国高速公路货物周转量为2.33×10
12
t·km, 同比增长约2.35%, 6年年均增长11.69%, 2014年增幅最小。高速公路空车走行率为24.15%, 保持稳定态势; 高速公路上超限30%以上的货车交通量从2008年的5.59%下降到2014年的2.85%, 货车计重收费效果明显。
更多>
2015, 15(5): 85-90.
doi:
10.19818/j.cnki.1671-1637.2015.05.011
摘要
(
838
)
HTML
(
79
)
PDF (492KB)
(
1451
)
引用
(
)
交通信息工程及控制
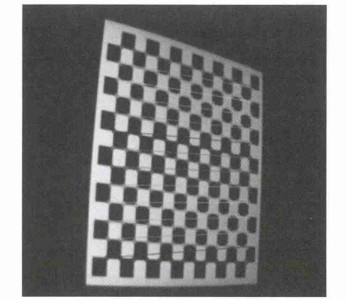
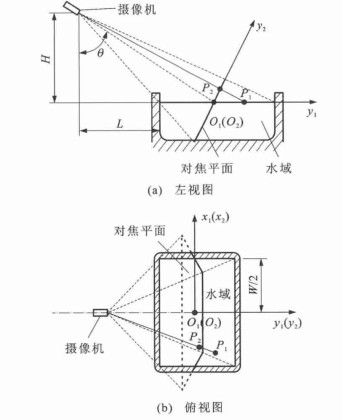
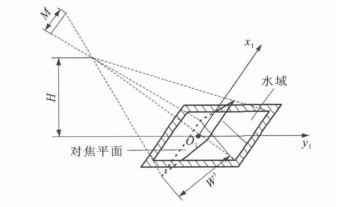
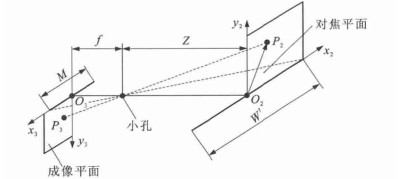
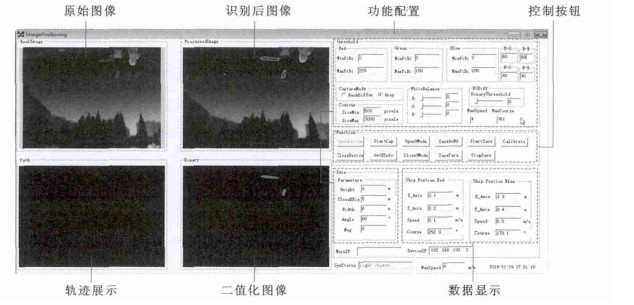
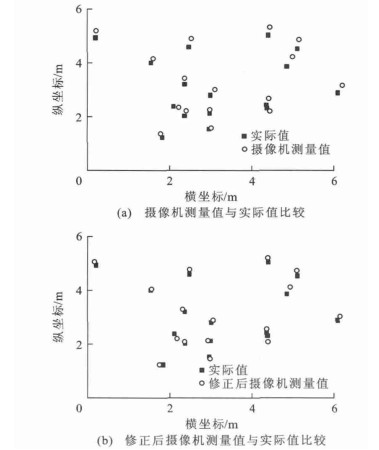
基于单目视觉的水面船舶多目标定位方法
柳晨光
,
初秀民
,
谢朔
,
王乐
摘要:
针对水面船舶的多目标实时定位, 提出了一种定位和运动参数求解算法, 采用固定位置和视角的单目摄像机采集船舶图像, 对采集的图像进行高斯滤波和图像畸变校正, 提出了基于船舶颜色、尺寸与运动学特征同时识别多个船舶目标(每个船舶目标独立识别)的方法, 构建了图像坐标与真实环境坐标的转换模型与实时航速、航向和轨迹的计算模型, 在水池环境下搭建了实时定位系统, 开发了实时定位程序, 并验证了定位方法的定位精度和轨迹跟踪性能。验证结果表明: 在存在外界干扰的情况下, 定位算法能实现对2艘船舶的精确识别; 修正前坐标点横、纵坐标平均误差分别为0.058、0.209m, 修正后分别为0.038、0.124m;摄像机定位数据更新频率为8 Hz, 满足船舶控制需要; 算法能实现对船舶位置、航速和航向的准确、实时计算, 轨迹平滑且未出现异常点。
更多>
2015, 15(5): 91-100.
doi:
10.19818/j.cnki.1671-1637.2015.05.012
摘要
(
668
)
HTML
(
149
)
PDF (814KB)
(
1377
)
引用
(
)
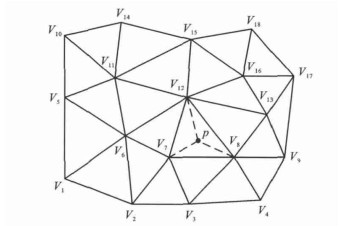
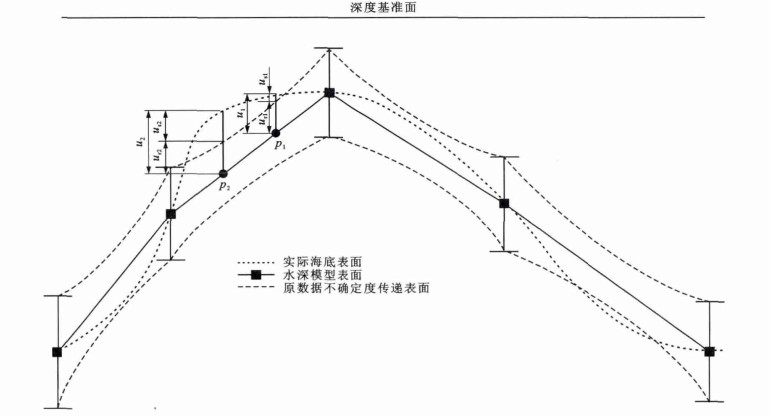
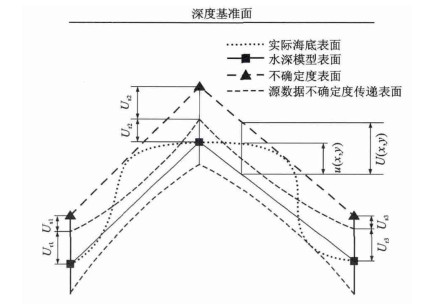
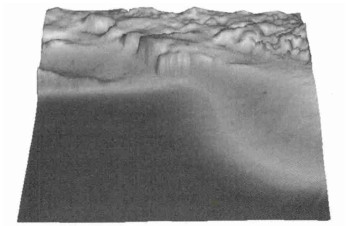
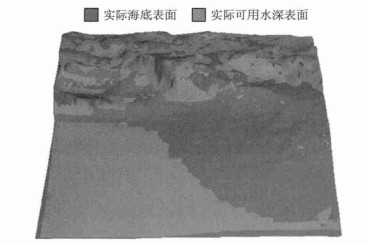
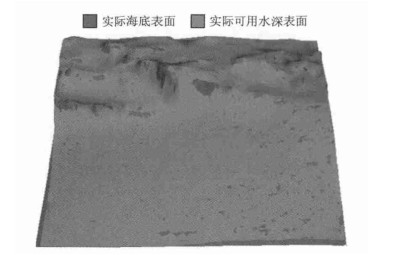
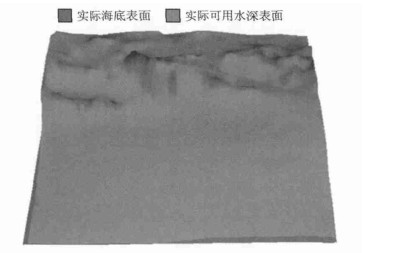
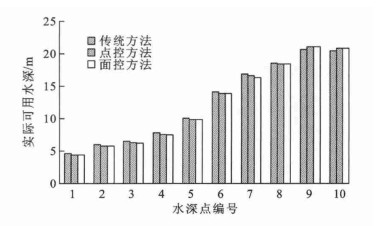
确保水深模型航海安全性的深度保证率控制方法
贾帅东
,
张立华
,
彭认灿
,
王涛
,
董箭
摘要:
针对当前海图水深应用在保证航海安全方面的不足, 提出了海图水深的深度保证率控制方法, 确保水深模型服务于航海的安全性。利用海图水深注记点, 建立不规则三角网水深模型表面, 推导了模型表面任意位置水深的整体计算公式。在考虑水深源数据不确定度对航海安全影响的基础上, 定量分析了水深模型在任意位置处描述不确定度的影响。通过在模型点上附加不确定度来控制描述不确定度的影响, 将水深模型的深度保证率控制在规定要求之内。在比例尺分别为1∶2 000、1∶5 000、1∶10 000、1∶50 000的海图上, 对提出的面控方法进行验证, 并与传统方法、点控方法进行了对比。分析结果表明: 与传统方法相比, 在4种海图上, 面控方法深度保证率的合格率分别提高了51.72%、49.37%、38.71%、28.39%;与点控方法相比, 面控方法分别提高了4.10%、5.00%、5.06%、9.65%;随着比例尺减小, 传统方法深度保证率的合格率有所提高, 点控方法有所下降, 而面控方法因为综合考虑了源数据不确定度和模型描述不确定度的影响, 深度保证率的合格率始终保持为100%;面控方法能将深度保证率控制在规定指标(97.5%)范围内, 而传统方法和点控方法均不能达到规定指标, 说明了面控方法的优越性。
更多>
2015, 15(5): 101-109.
doi:
10.19818/j.cnki.1671-1637.2015.05.013
摘要
(
480
)
HTML
(
84
)
PDF (645KB)
(
659
)
引用
(
)
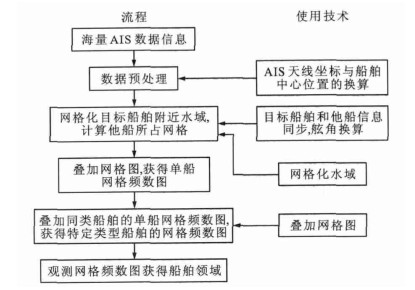
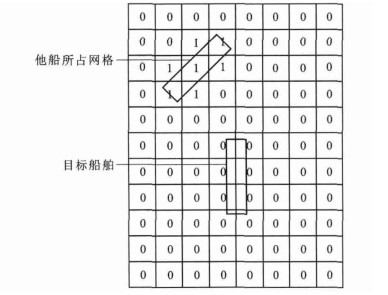
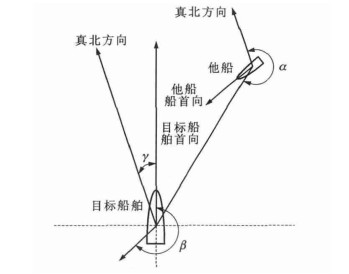
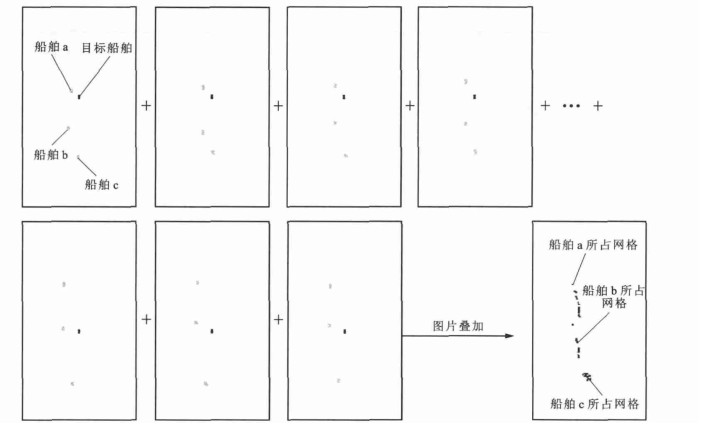
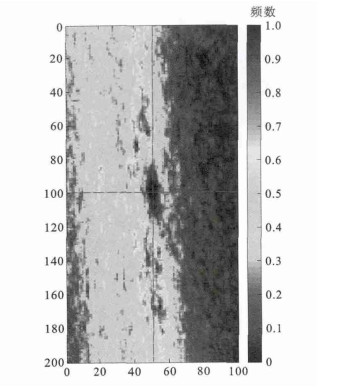
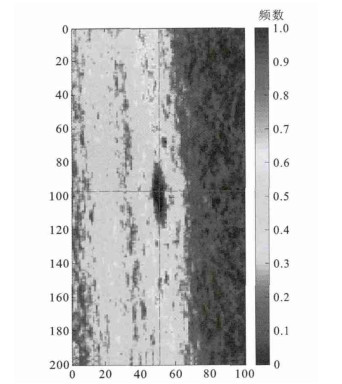
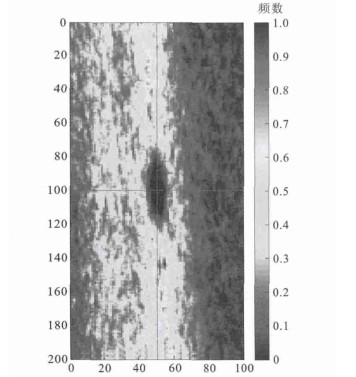
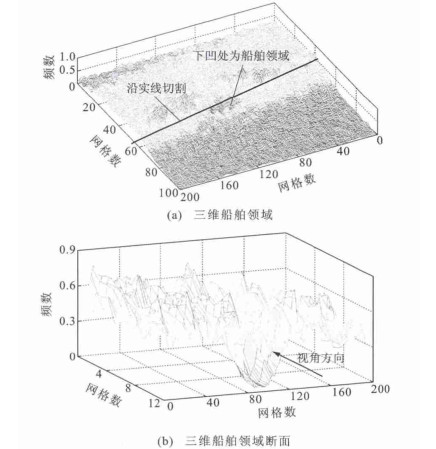
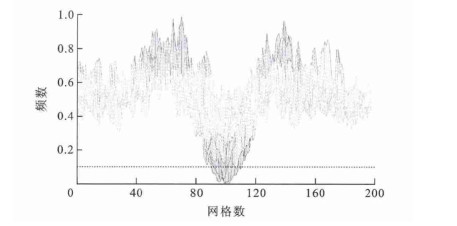
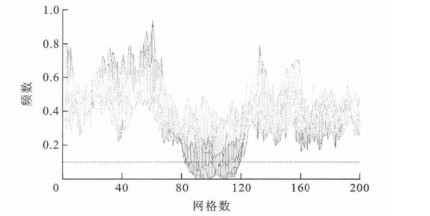
基于AIS数据的受限水域船舶领域计算方法
向哲
,
胡勤友
,
施朝健
,
杨春
摘要:
为获取受限水域船舶领域, 提出一种利用海量AIS数据建立模型的方法。选取目标船舶的AIS数据, 将其附近水域网格化, 考虑了船舶尺寸, 计算了他船船体出现在每一个网格中的频数, 提取单船网格频数图, 将同一类型的目标船舶网格频数图叠加, 形成了特定类型船舶的网格频数图。将网格频数图按频数填充颜色, 可清晰地显示船舶领域的形状, 利用断面分析测量船舶领域长度。选用上海港南槽水域的AIS数据对方法进行验证, 统计了60~79、80~99、100~119、120~139、140~159m共5类不同长度船舶的船舶领域。分析结果表明: 由于考虑了船舶尺寸, 5类船舶的领域在长轴方向较船首向存在向左舷偏转的夹角, 角度分别为3.37°、9.46°、17.53°、10.78°、8.13°; 船舶领域长度与船舶长度的比值依次递减, 比值分别为6.00、5.80、5.67、5.43、5.13。可见受限水域内船舶领域形状为不规则椭圆, 且船舶领域长度与船舶长度的比值并非为定值。
更多>
2015, 15(5): 110-117.
doi:
10.19818/j.cnki.1671-1637.2015.05.014
摘要
(
633
)
HTML
(
133
)
PDF (815KB)
(
720
)
引用
(
)
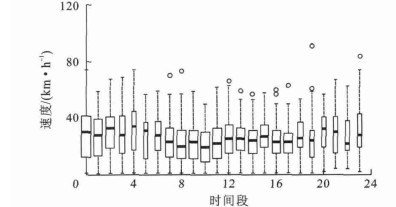
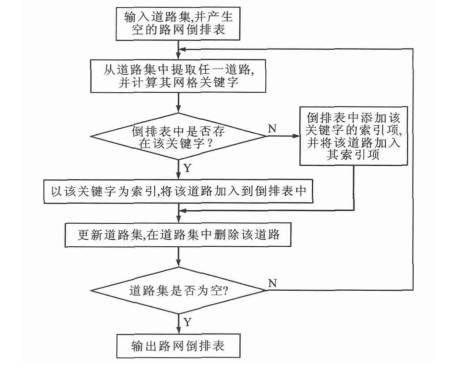
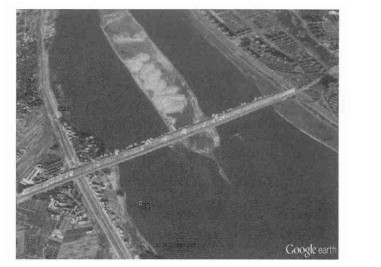
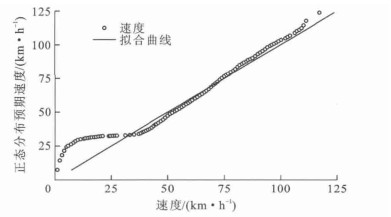
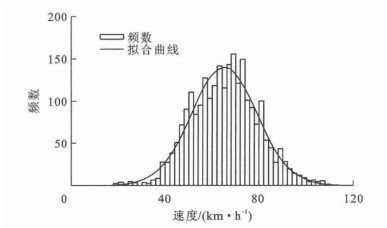
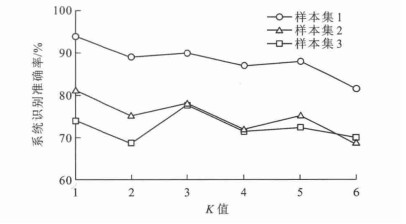
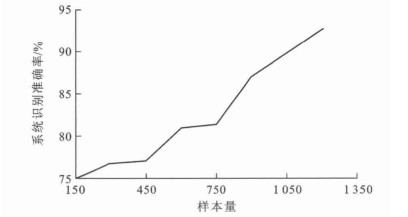
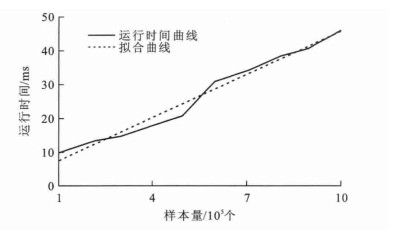
基于交通轨迹数据挖掘的道路限速信息识别方法
廖律超
,
蒋新华
,
林铭榛
,
邹复民
摘要:
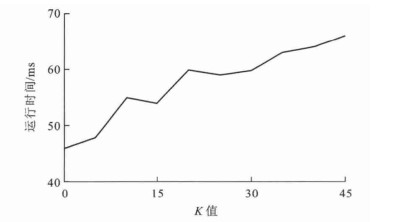
分析了道路限速信息的时空变化性, 提出一种基于轨迹数据挖掘技术的道路限速信息自动识别方法。为了实现海量交通轨迹数据的快速处理, 研究了快速地图匹配与数据清洗等预处理算法, 分析了交通轨迹数据的速度分布特性与最高车速限制指标。基于路段行车速度的统计特性, 构建了道路特征向量模型, 以快速提取海量轨迹数据的潜在特征信息。提出了多投票
K
近邻分类算法对数据特性进行训练与学习, 以实现对道路限速信息的快速识别。以福州市交通路网及其浮动车轨迹数据构建试验样本集进行训练、学习与交叉验证试验。试验结果表明: 在训练过程中, 当样本数量达到1 200时, 方法的识别准确率最高达到93%, 在仅有150个小训练样本下, 方法的识别准确率也达到75%;方法具有近线性的处理性能, 处理1.0×10
6
条道路的限速信息仅用时46ms。
更多>
2015, 15(5): 118-126.
doi:
10.19818/j.cnki.1671-1637.2015.05.015
摘要
(
669
)
HTML
(
123
)
PDF (635KB)
(
1497
)
引用
(
)
文章推荐
更多>
长寿命UHPFRC组合钢桥面板研究综述
桥梁工程中非接触位移测量技术研究综述
钢桥疲劳研究进展
国家自然科学基金委员会交通与运载工程学科2023年度管理工作综述
桥梁火灾科学与安全保障技术综述
低空空域容量评估研究综述
自动驾驶测试与评价技术研究进展
自动驾驶测试公共服务平台建设与思考
众包配送研究综述
图神经网络在交通预测中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
“综合交通/新型交通与新兴交叉技术”专刊征稿启事
《交通运输工程学报》入选 “2021年百种中国杰出学术期刊”
《交通运输工程学报》入选“2022 年度中国高校科技期刊建设示范案例库•杰出科技期刊”
《交通运输工程学报》2021年入选“三秦卓越科技期刊”
《交通运输工程学报》入选 “2022年百种中国杰出学术期刊”
《交通运输工程学报》2021年荣获“第五届中国出版政府奖提名奖”
作者园地
更多>
诚聘青年编委
《交通运输工程学报》推荐外籍编委
关于文章中的中国地图
科技名词英汉对照
2017年4月Ei刊源
学术会议
更多>
民航机场工程技术创新论坛
第三届国际无伸缩缝与可持续桥梁研讨会
第十届全国交通运输领域青年学术会议
友情链接
更多>
长安大学
长安大学学术期刊管理中心
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式