首页
学报概况
学报简介
编辑部
编委简介
期刊在线
优先发表
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
作者园地
修改格式
报道计划
征稿启事
投稿流程
摘要写作
投稿模版
科学研究
科研院所
研究前沿
研究动态
学术会议
重大项目
招标信息
政策法规
科研不端处理
期刊编辑出版规范
出版管理条例
期刊出版规定
出版伦理
期刊订阅
联系我们
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
学报概况
学报简介
编辑部
编委简介
期刊在线
优先发表
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
作者园地
修改格式
报道计划
征稿启事
投稿流程
摘要写作
投稿模版
科学研究
科研院所
研究前沿
研究动态
学术会议
重大项目
招标信息
政策法规
科研不端处理
期刊编辑出版规范
出版管理条例
期刊出版规定
出版伦理
期刊订阅
联系我们
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投搞
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 双月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
重要源期刊收录
更多>
美国《工程索引》(Ei)
荷兰《斯高帕斯数据库》(Scopus)
美国《剑桥科学文摘:工程技术》(CSA:Technology)
《日本科学技术振兴机构中国文献数据库》(JST)
英国《物理学、电技术、计算机及控制信息社数据库》(INSPEC)
波兰《哥白尼索引》(IC)
邮件订阅
RSS
2017年 第17卷 第5期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
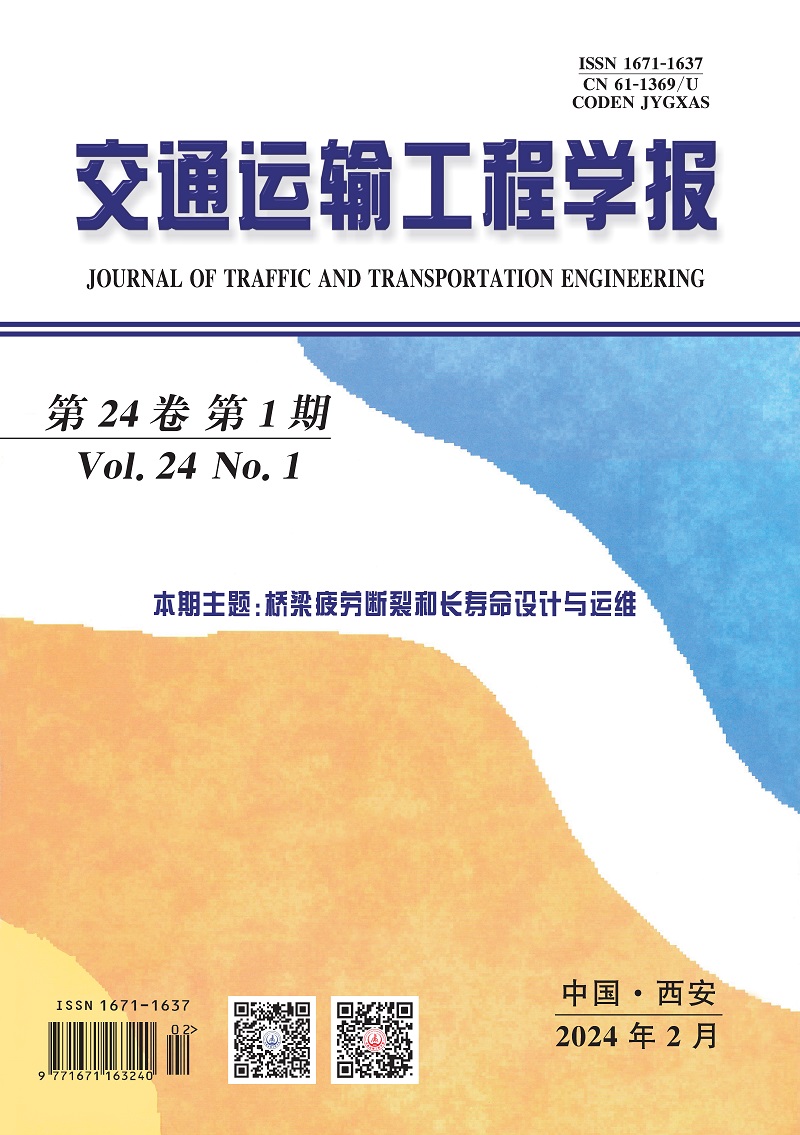
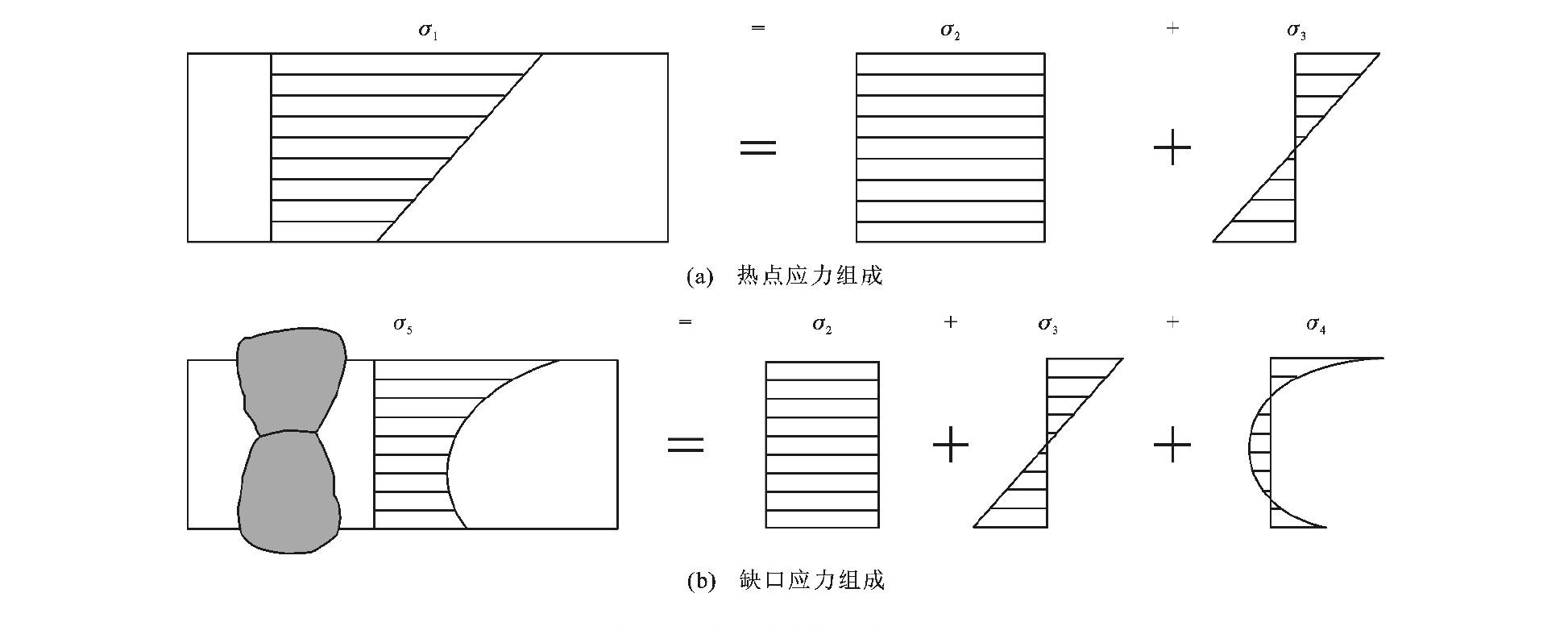
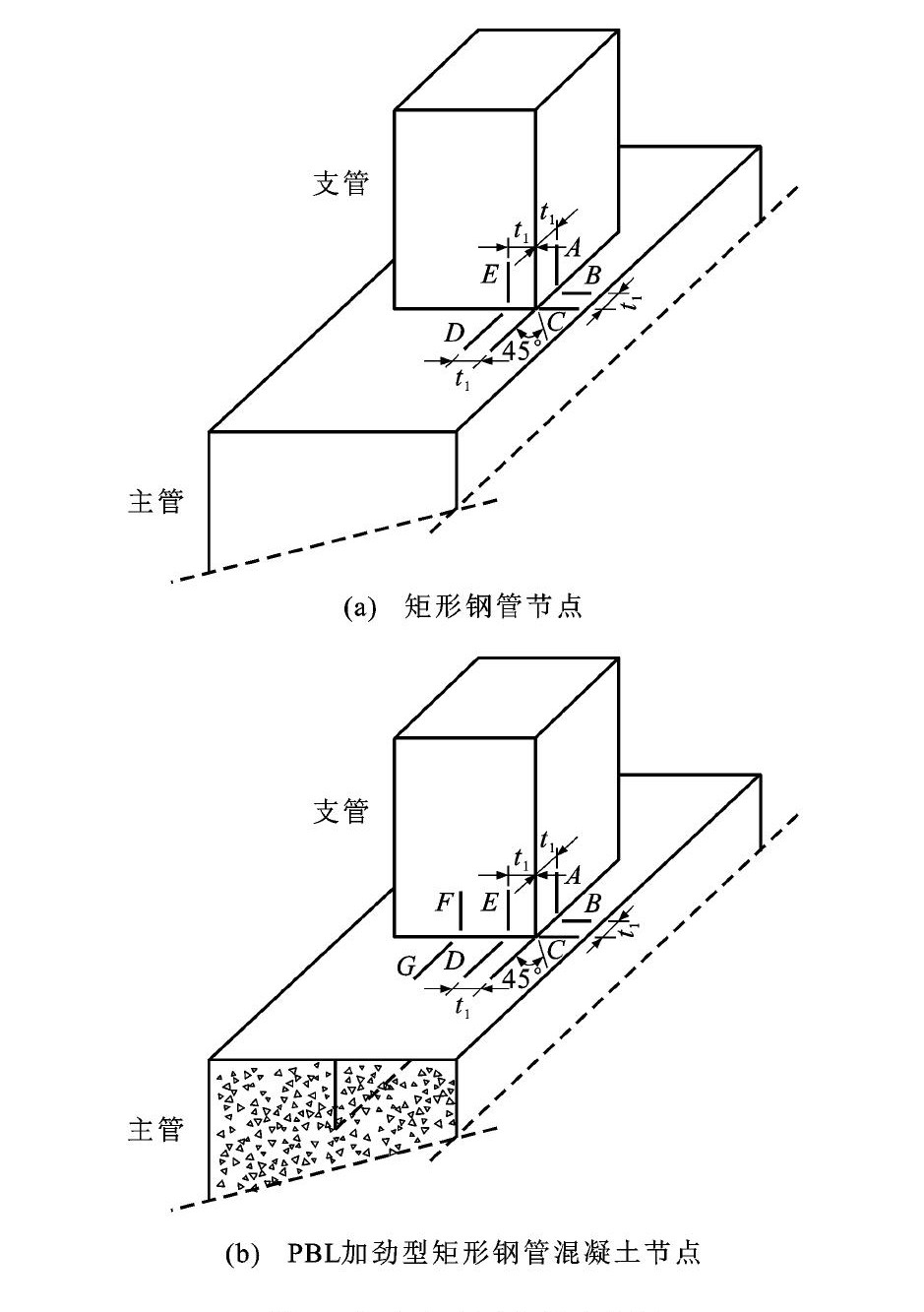
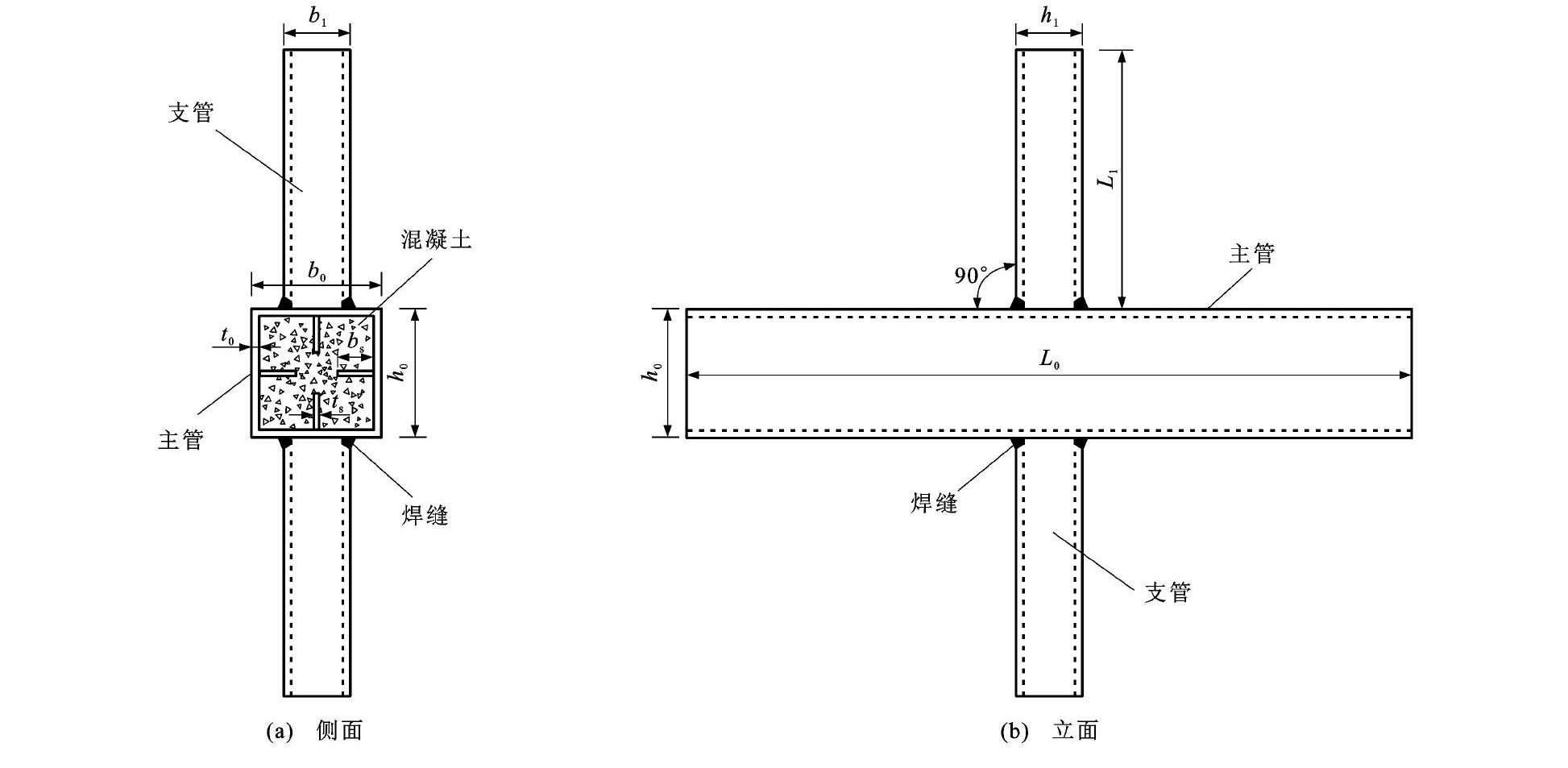
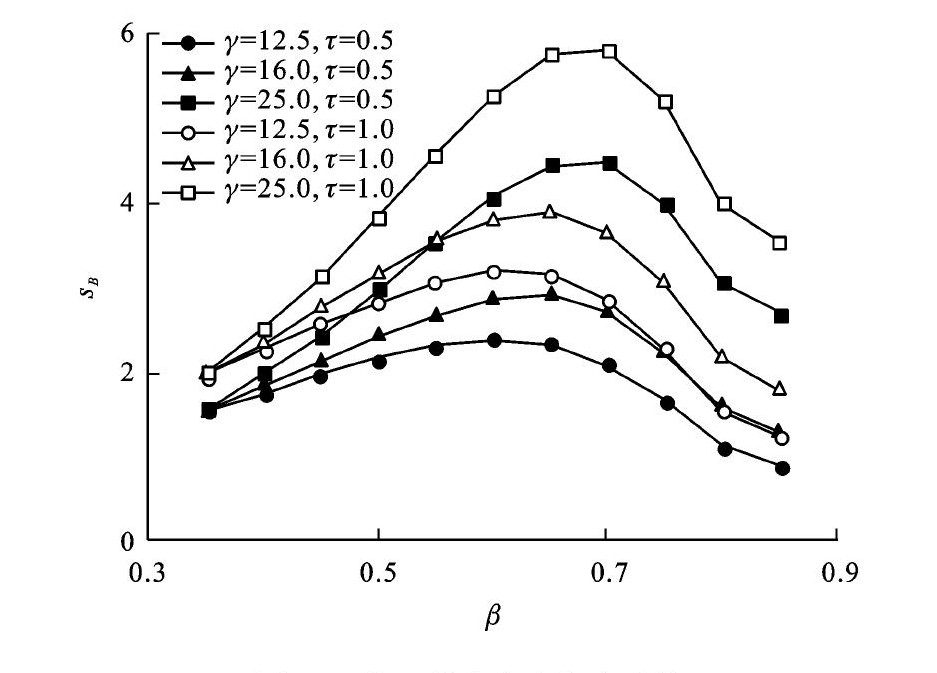
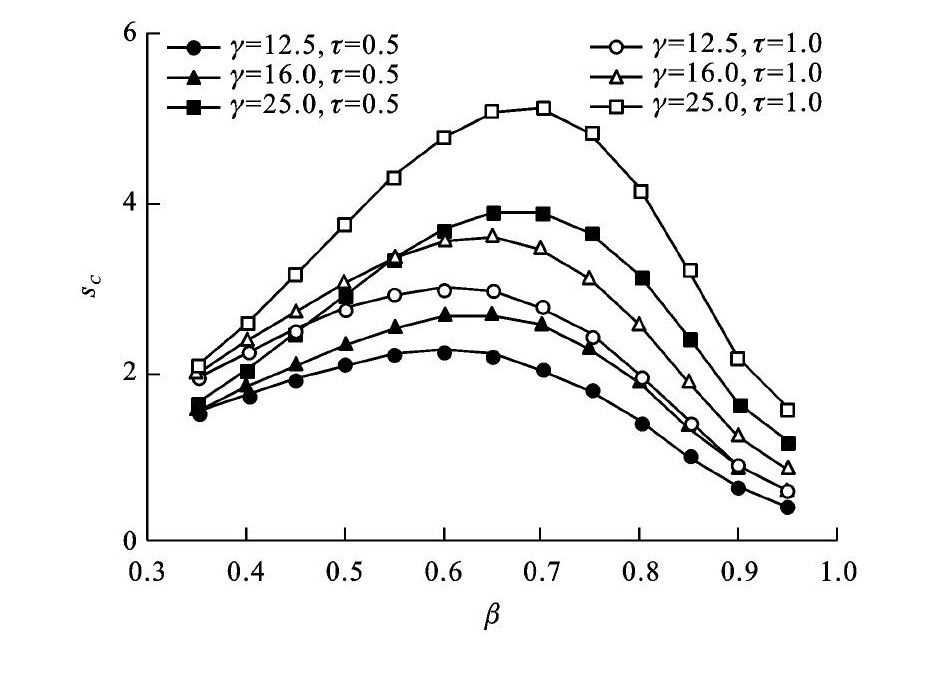
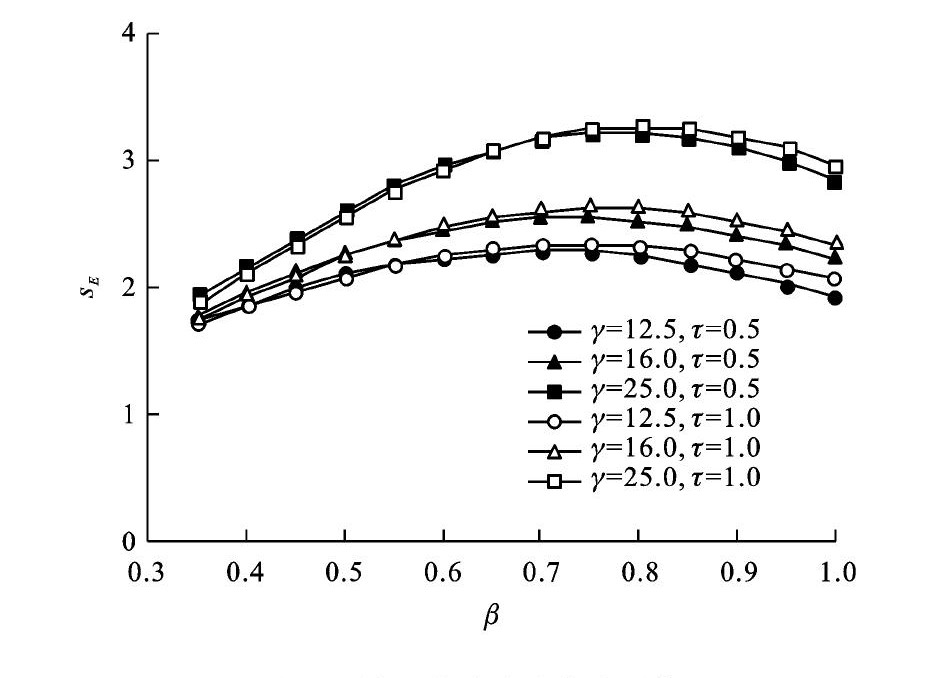
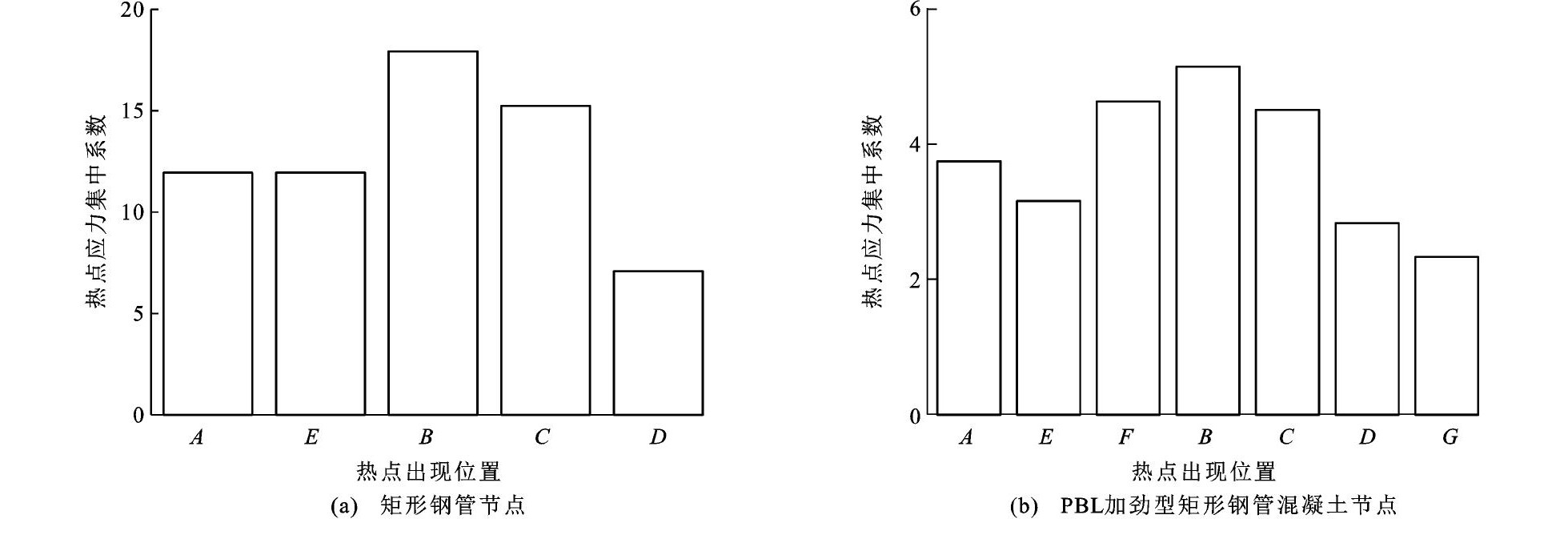
PBL加劲型矩形钢管混凝土受拉节点热点应力集中系数计算方法
刘永健
,
姜磊
,
熊治华
,
张国靖
,
AmirFAM
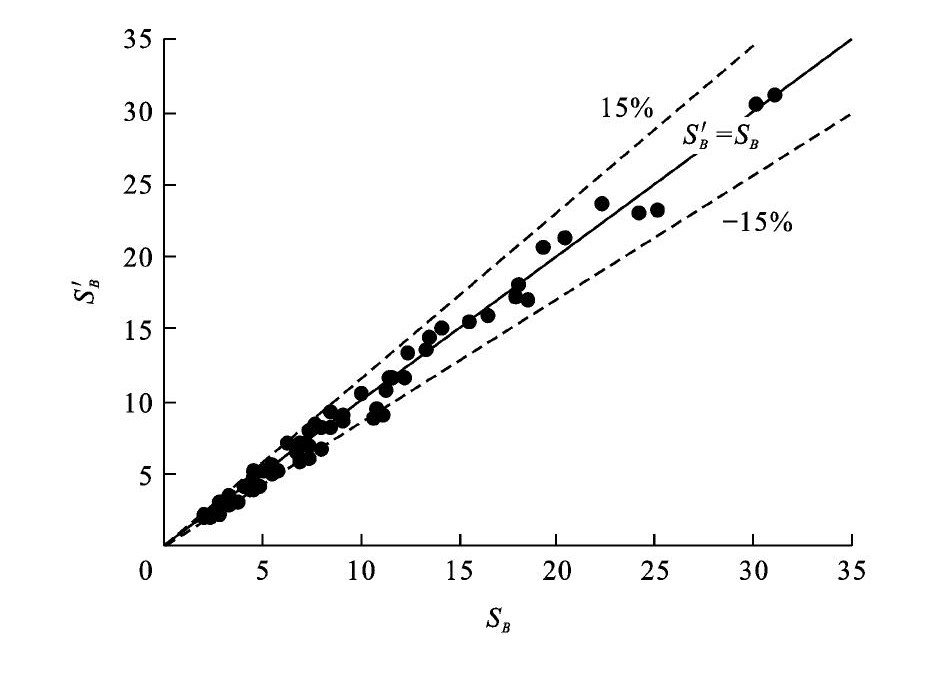
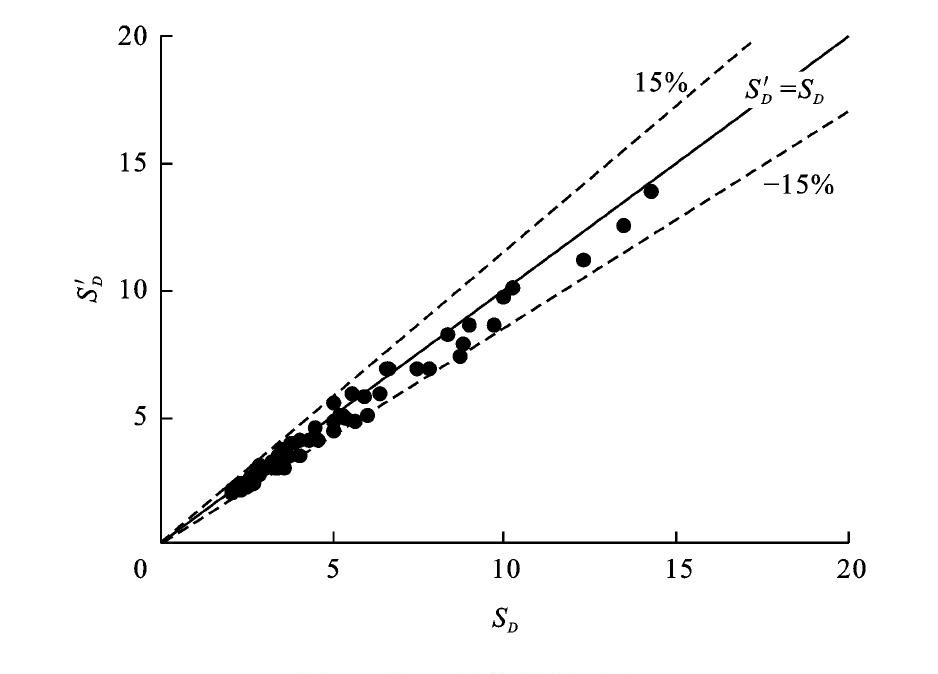
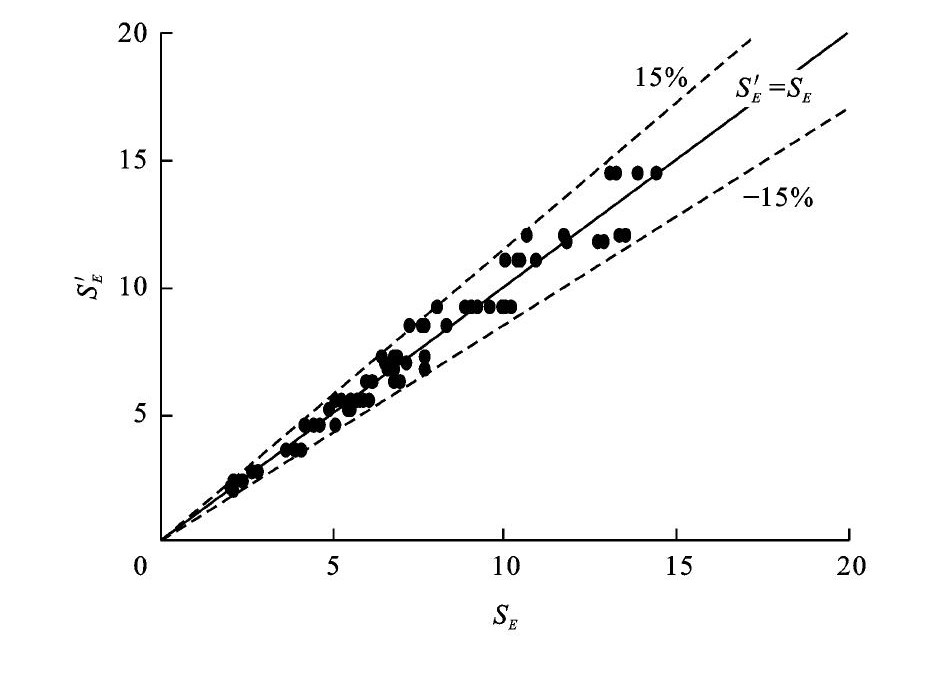
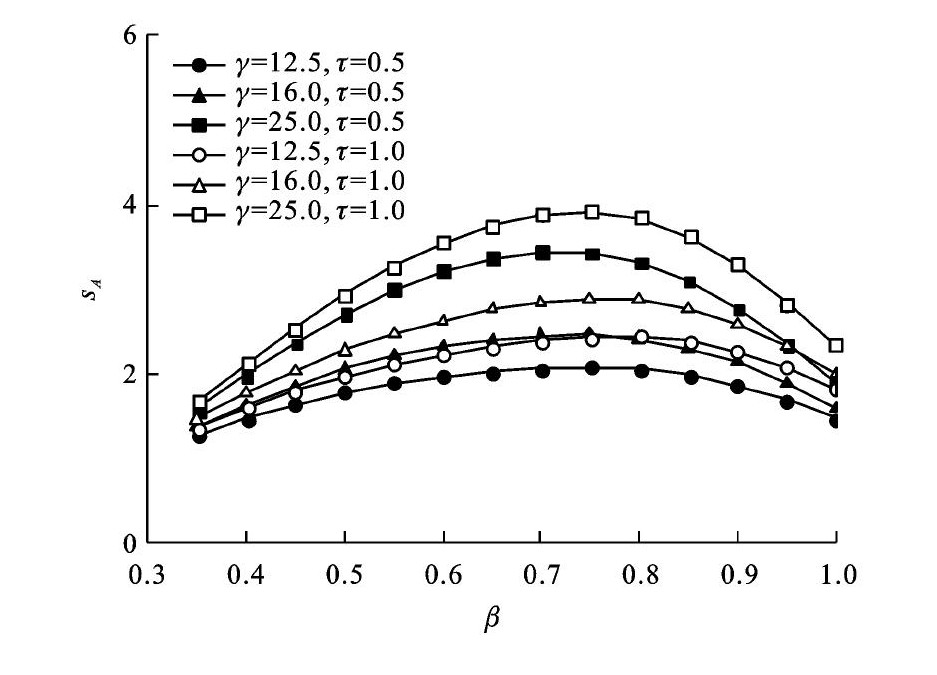
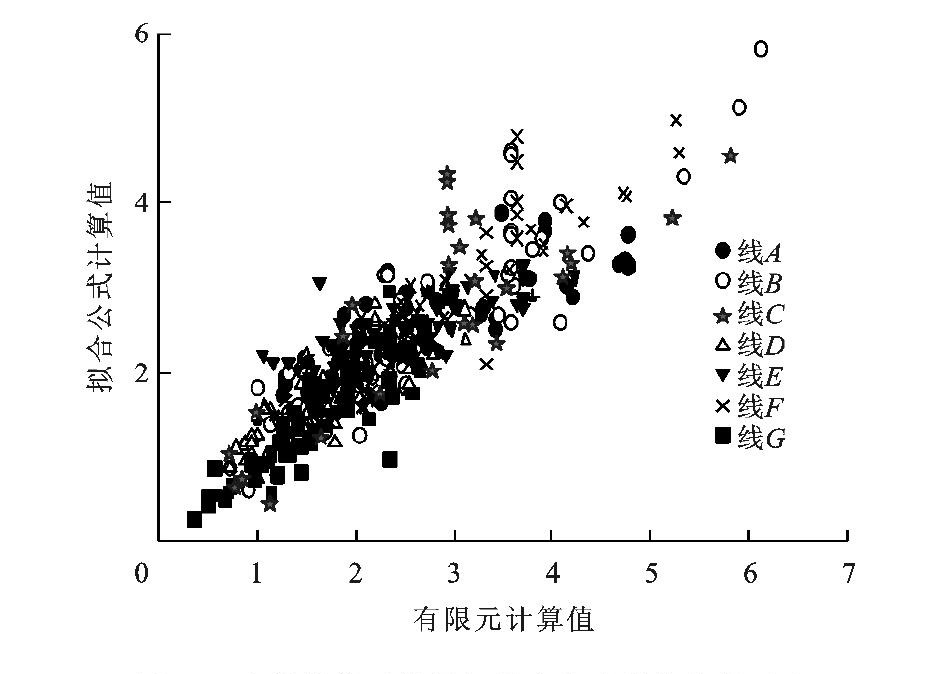
摘要:
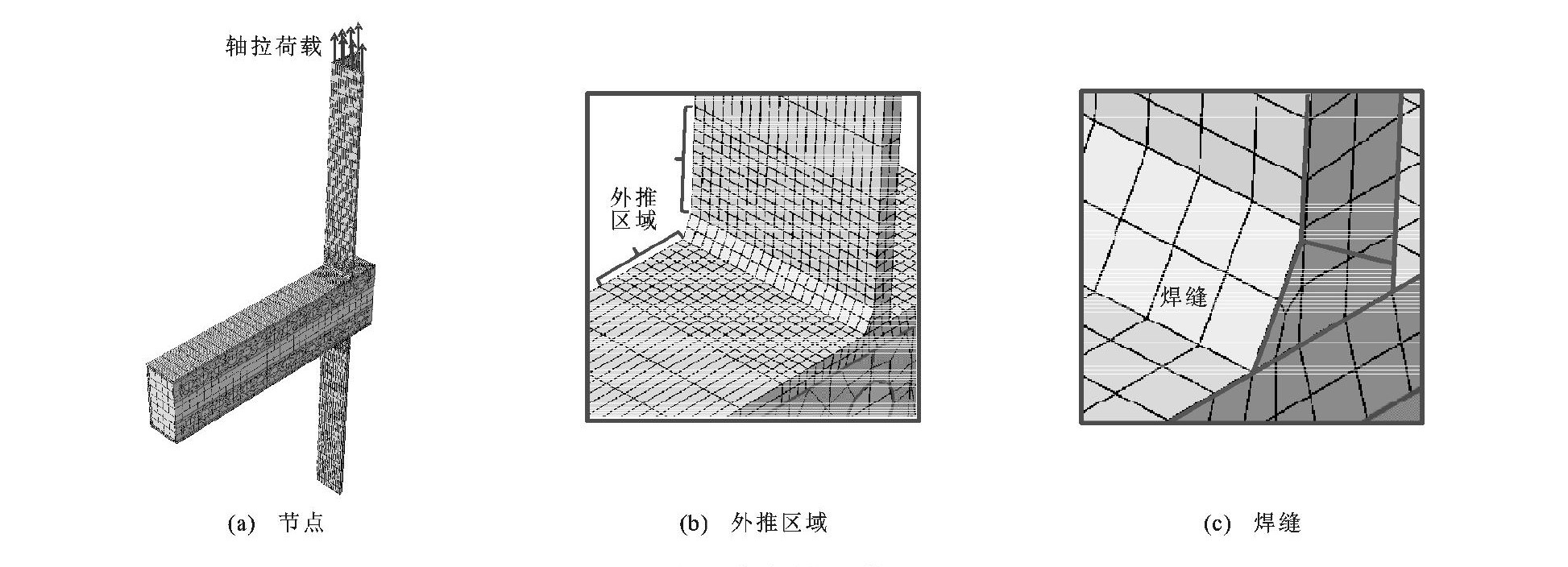
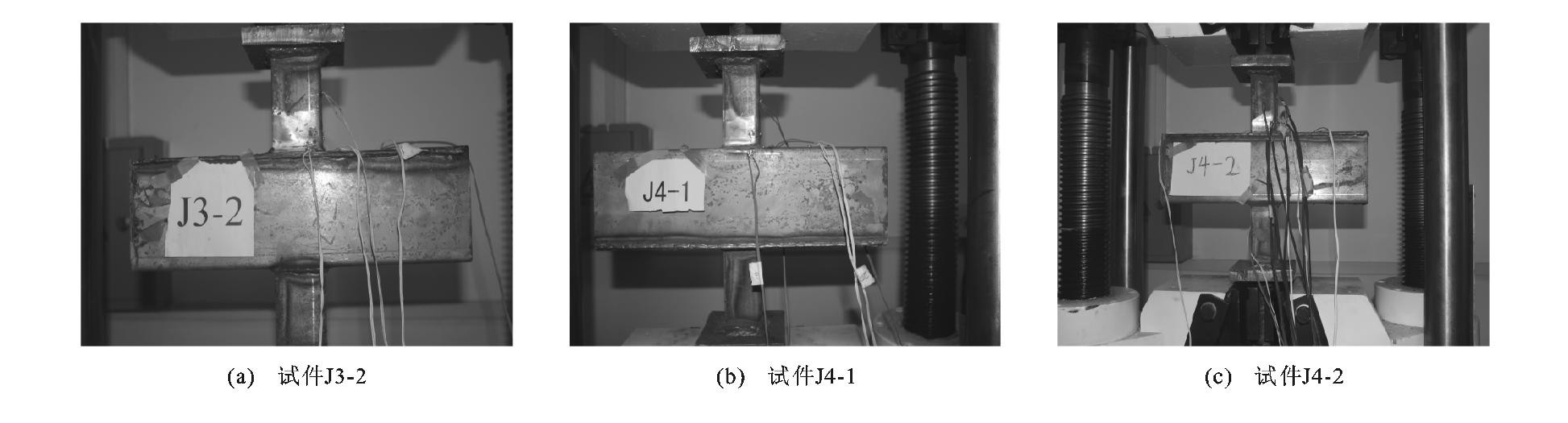
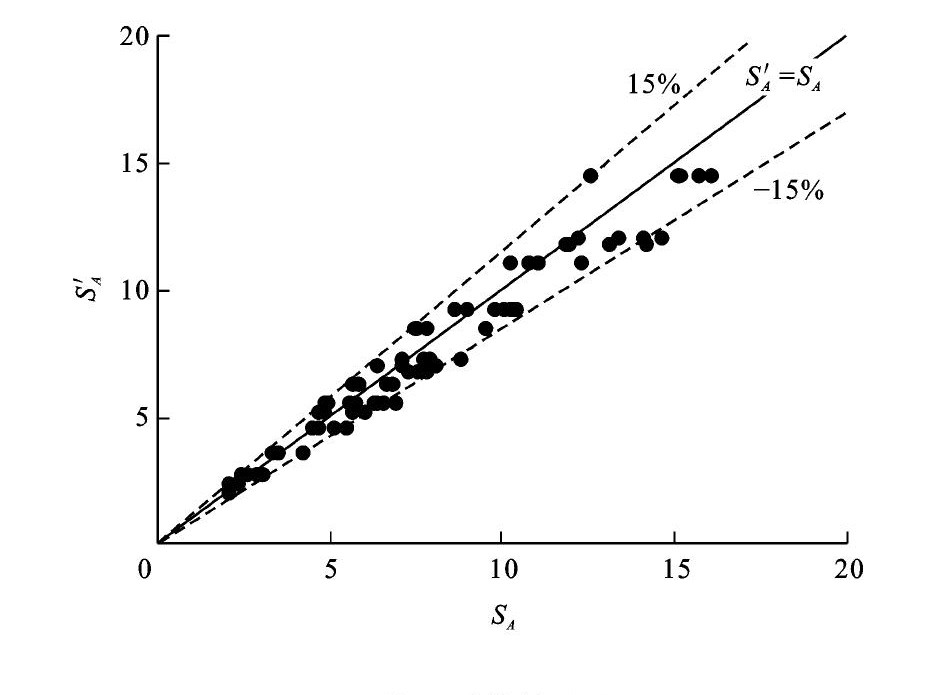
考虑了PBL加劲型矩形钢管混凝土支管受拉节点支主管宽度比与厚度比和主管宽厚比, 建立了热点应力集中系数有限元模型, 计算了支主管节点热点应力集中系数; 基于最小二乘法对计算结果进行拟合, 给出不同几何参数下节点热点应力集中系数计算公式, 对比了矩形钢管节点和PBL加劲型矩形钢管混凝土节点应力集中系数和荷载幅。计算结果表明: 采用有限元模型计算的热点应力集中系数曲线与静力试验曲线基本一致, 支主管交汇处各位置热点应力集中系数有限元计算结果与CIDECT规范公式计算结果平均比值分别为1.006、1.007、1.013、1.015和0.987, 两者差值小于15%, 因此, 有限元模型可靠; PBL加劲型矩形钢管混凝土支管受拉节点热点应力集中系数变化规律基本一致, 随支主管宽度比呈抛物线变化, 在0.6
0
.8之间达到最大值, 随主管宽厚比和支主管厚度比增大而增大, 与CIDECT规范中矩形钢管节点计算结果一致; 拟合得到的PBL加劲型矩形钢管混凝土节点热点应力集中系数公式计算结果与有限元计算结果的平均比值为1.011, 均方差为0.222, 变异系数为0.219, 说明了拟合公式准确; 采用应力集中系数计算公式, 将PBL加劲型矩形钢管混凝土节点与矩形钢管节点进行对比, PBL加劲型矩形钢管混凝土节点支管热点应力集中系数下降了68%以上, 主管热点应力集中系数下降了61%以上, 在2.0×106循环次数作用下, 容许荷载幅提高到3倍以上。
更多>
2017, 17(5): 1-15.
摘要
(
686
)
HTML
(
105
)
PDF (1927KB)
(
1037
)
引用
(
)
R-UHPC梁的抗剪承载力计算方法
马熙伦
,
陈宝春
,
杨艳
,
黄卿维
,
苏家战
,
吴前文
,
沈秀将
摘要:
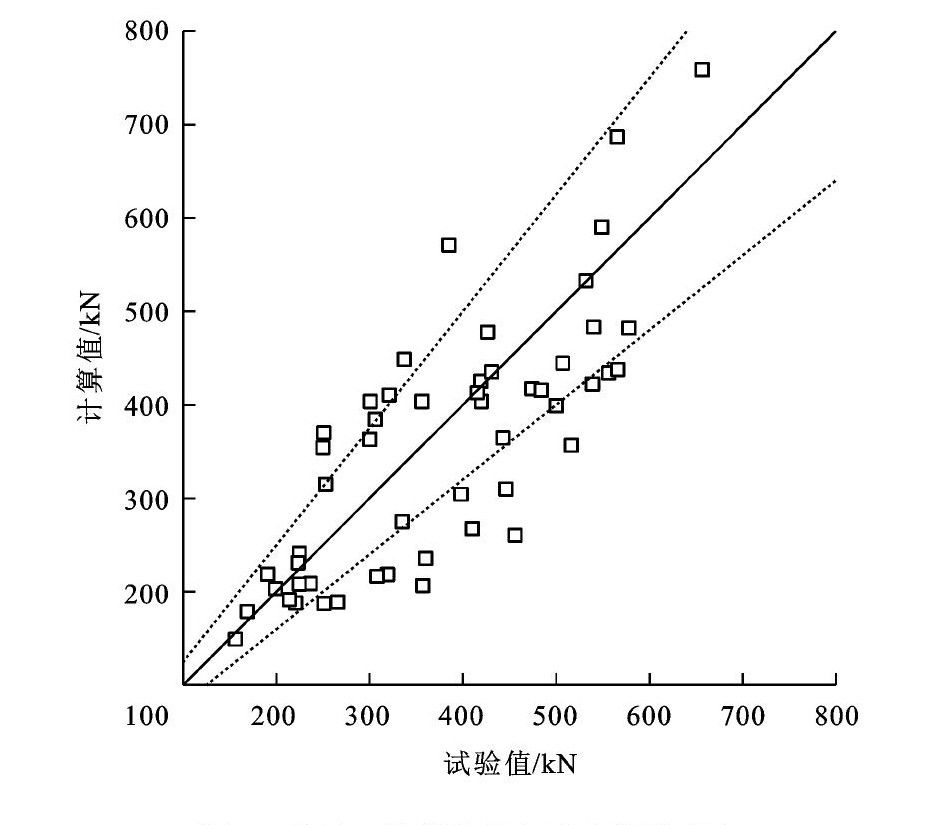
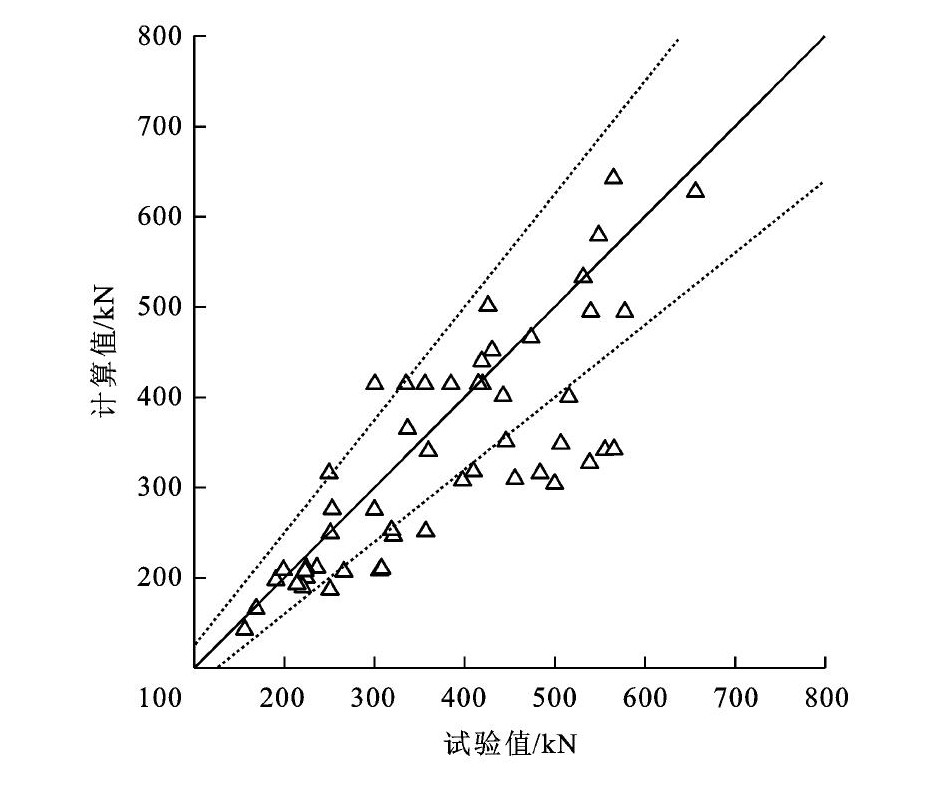
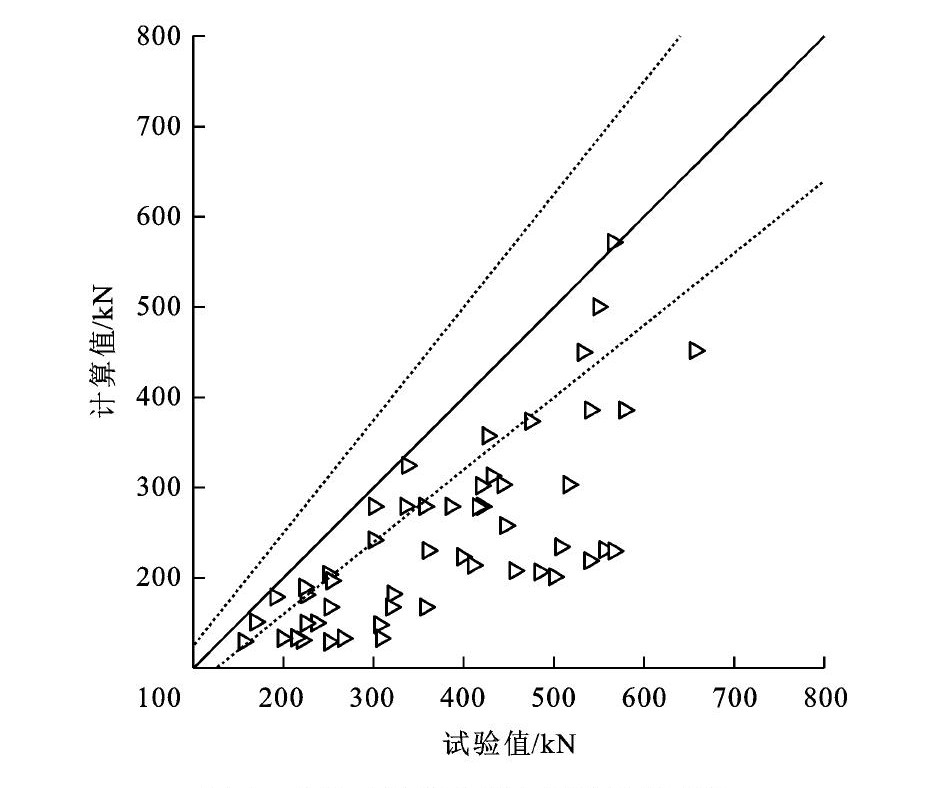
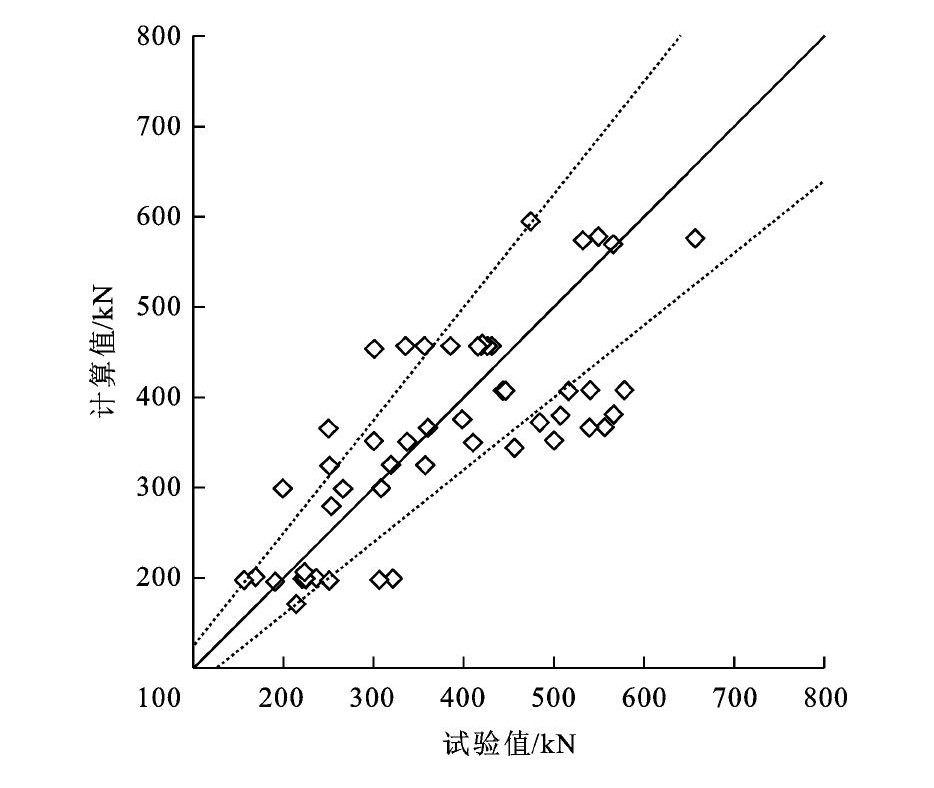
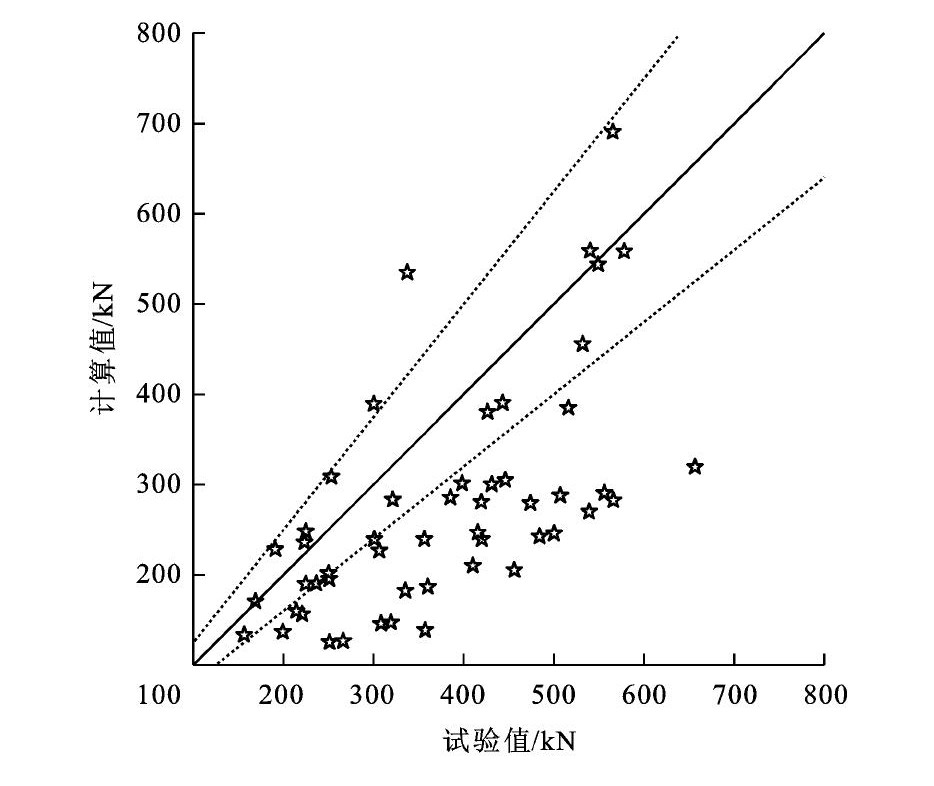
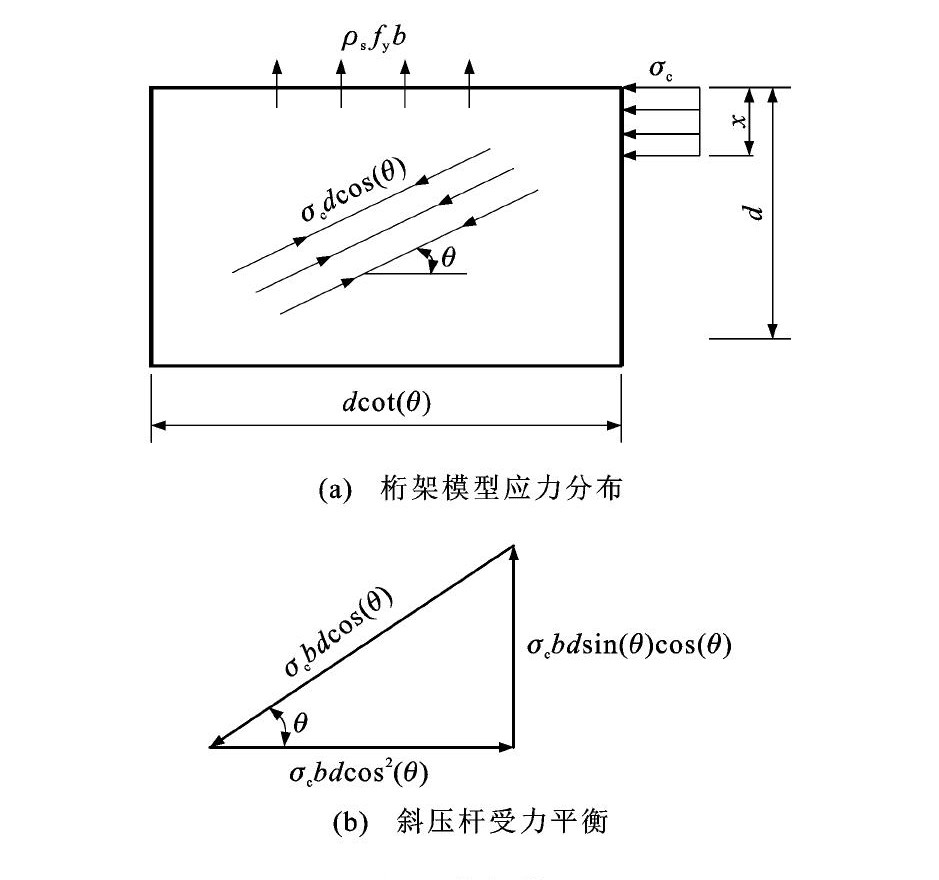
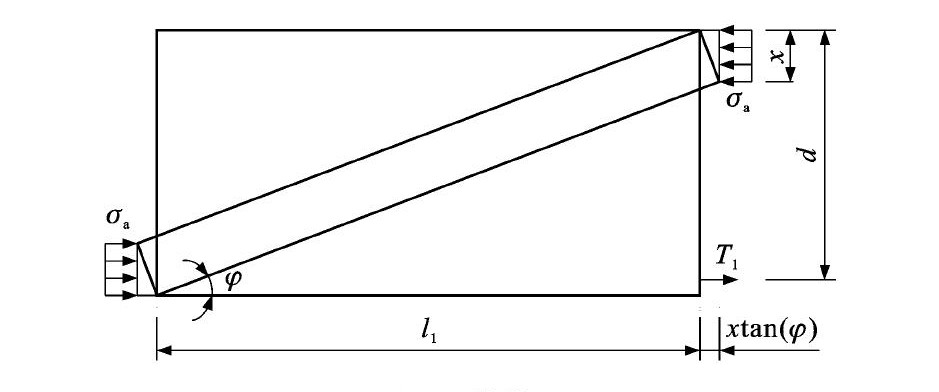
收集了大量的配筋超高性能混凝土(R-UHPC) 梁抗剪承载力的试验数据, 分析了现有抗剪承载力计算方法, 研究了R-UHPC梁的抗剪机理, 考虑了UHPC的抗拉作用, 提出了基于桁架-拱模型的R-UHPC梁抗剪承载力计算方法, 并比较了计算结果与试验结果。比较结果表明: 在现有的计算方法中, 采用基于统计分析方法的承载力计算值与试验值的平均比值为0.92, 比值的标准差为0.23, 比值的相关性系数为0.78, 比值的可靠性系数为0.877, 该方法因回归数据有限, 精度不高; 对于基于一般桁架模型的梁抗剪承载力计算方法, 法国UHPC指南AFGC抗剪承载力计算值与试验值的平均比值为0.90, 比值的标准差为0.18, 比值的相关性系数为0.80, 比值的可靠性系数为0.891, 计算精度较日本UHPC标准JSCE和瑞士标准SIA较高; 在AFGC指南基础上, 考虑了纵筋影响, 抗剪承载力计算值与试验值平均比值为0.93, 比值的标准差为0.23, 比值的相关性系数为0.75, 比值的可靠性系数为0.858, 与AFGC计算结果相比离散性较大; 采用基于桁架-拱模型的抗剪承载力计算方法的抗剪承载力计算值与试验值平均比值为0.76, 比值的标准差为0.26, 比值的相关性系数为0.62, 比值的可靠性系数为0.768, 因直接套用钢筋(普通) 混凝土梁的抗剪承载力计算方法且不计UHPC的抗拉作用, 计算结果过于保守, 且可靠性最差; 采用提出的抗剪承载力计算方法的计算值与试验值的平均比值为0.94, 比值的标准差为0.21, 比值的相关性系数为0.80, 比值的可靠性系数为0.885, 与现有计算方法相比, 本文提出计算方法精度较高, 离散性小。
更多>
2017, 17(5): 16-26.
摘要
(
650
)
HTML
(
185
)
PDF (665KB)
(
780
)
引用
(
)
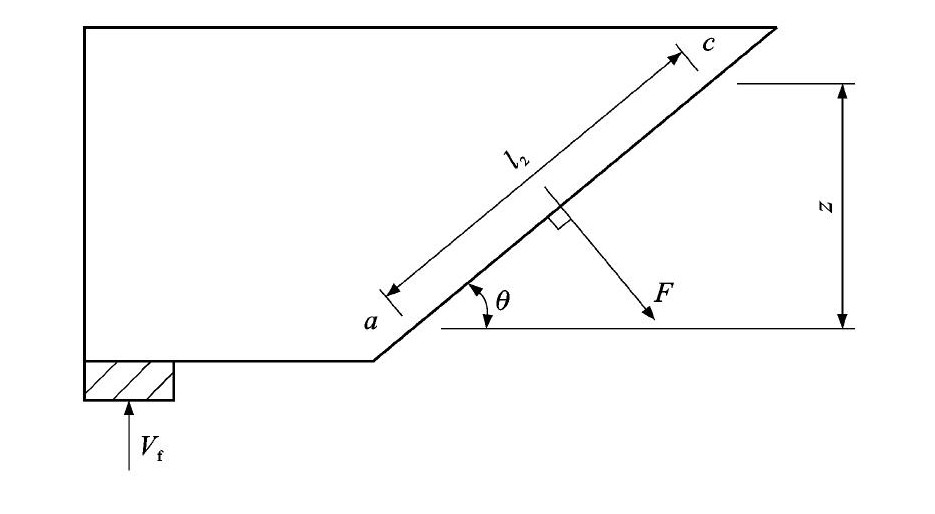
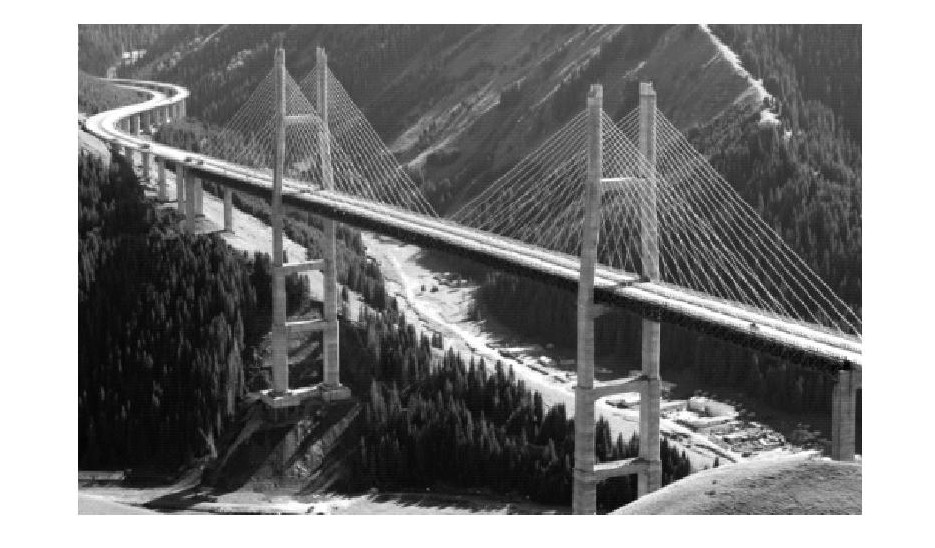
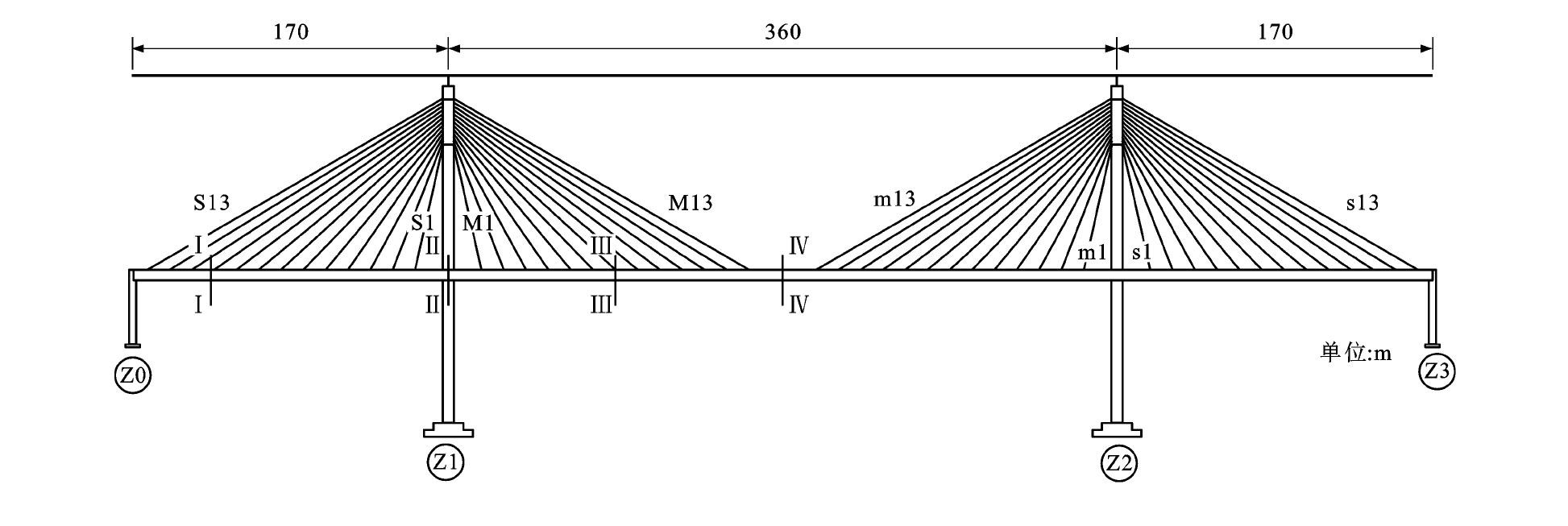
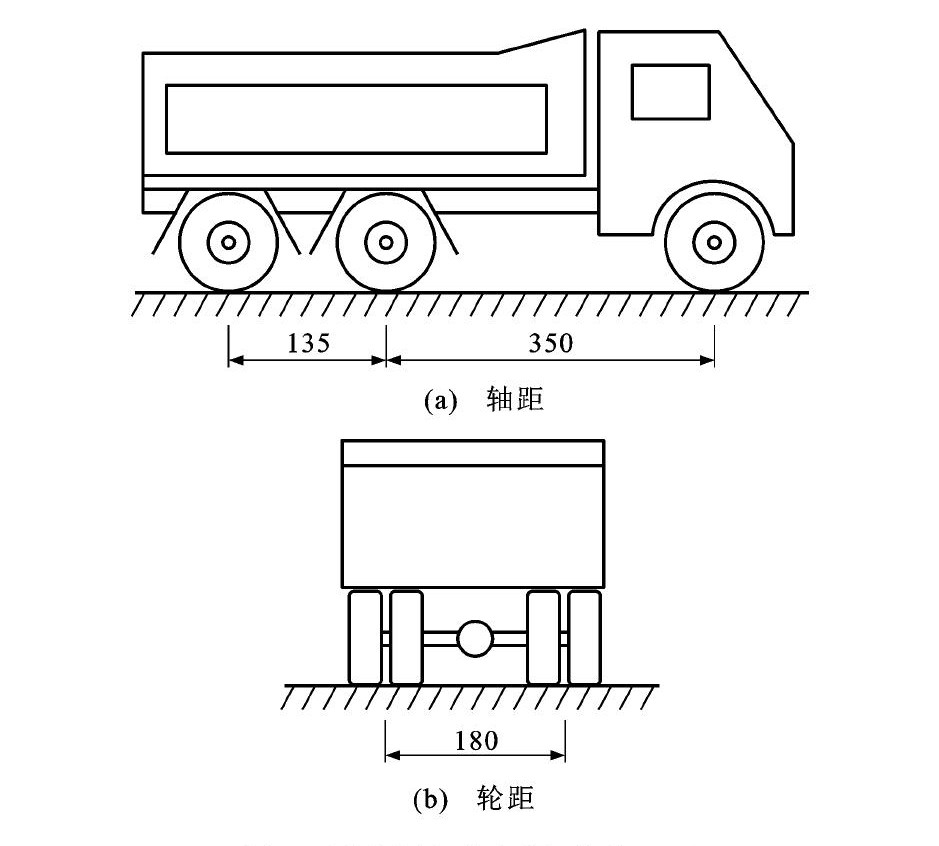
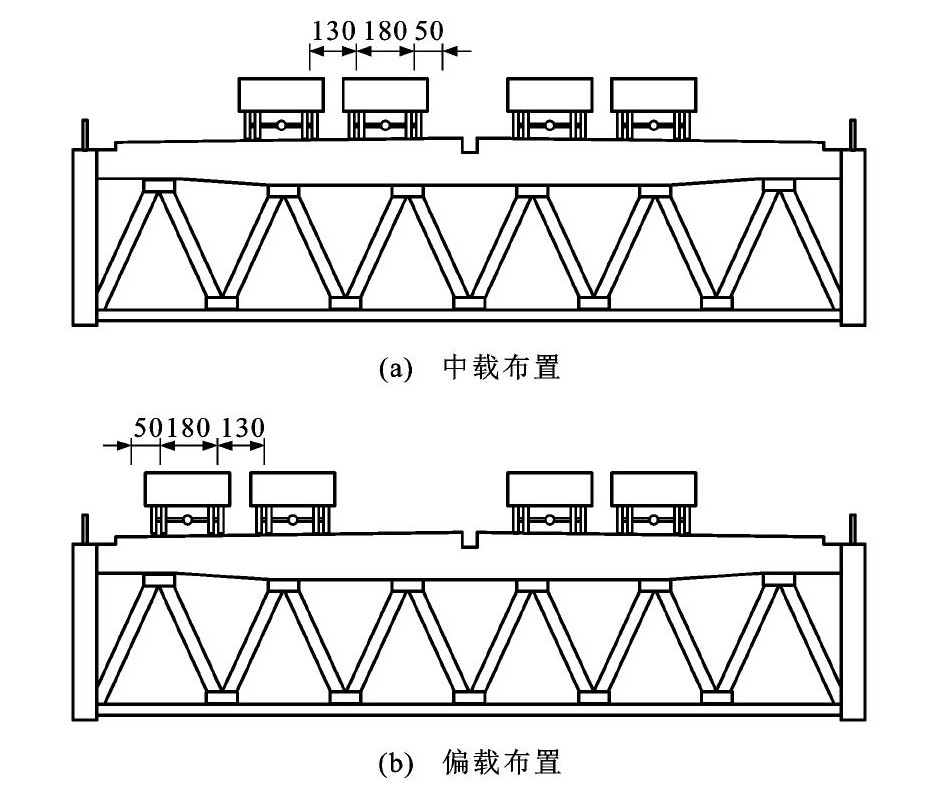
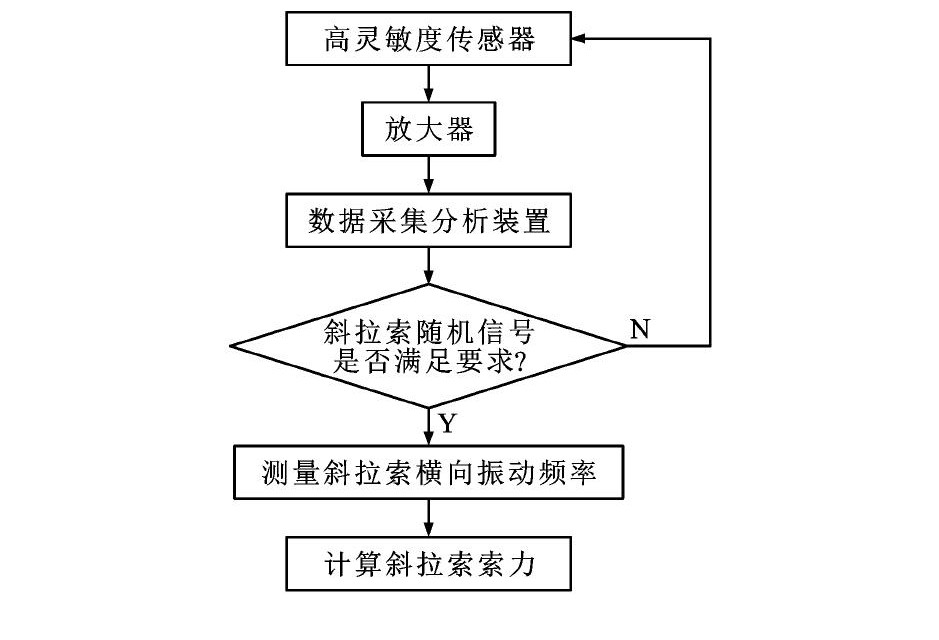
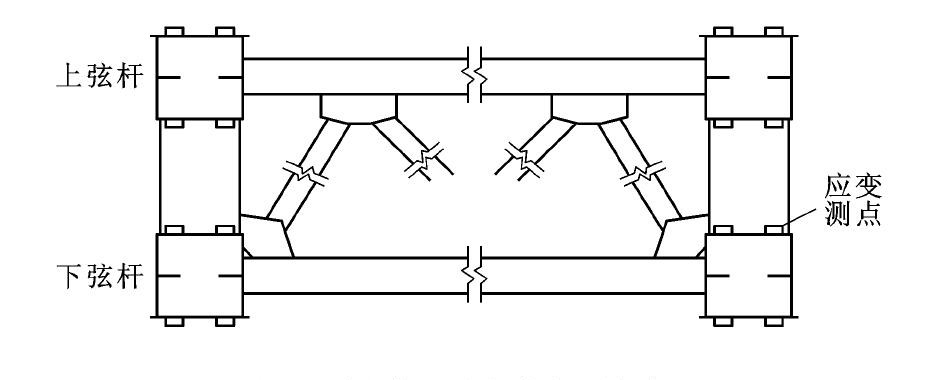
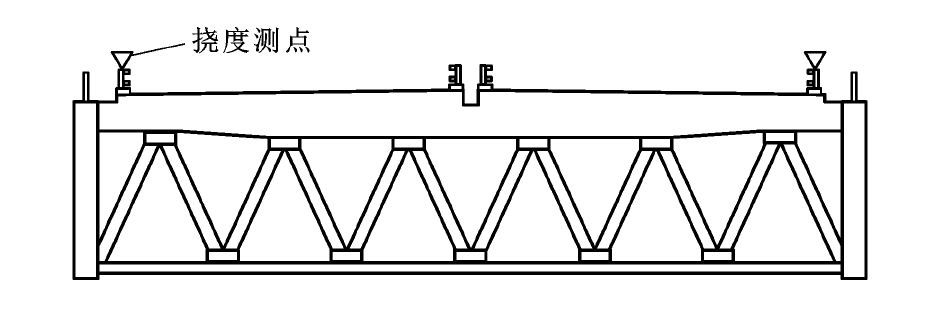
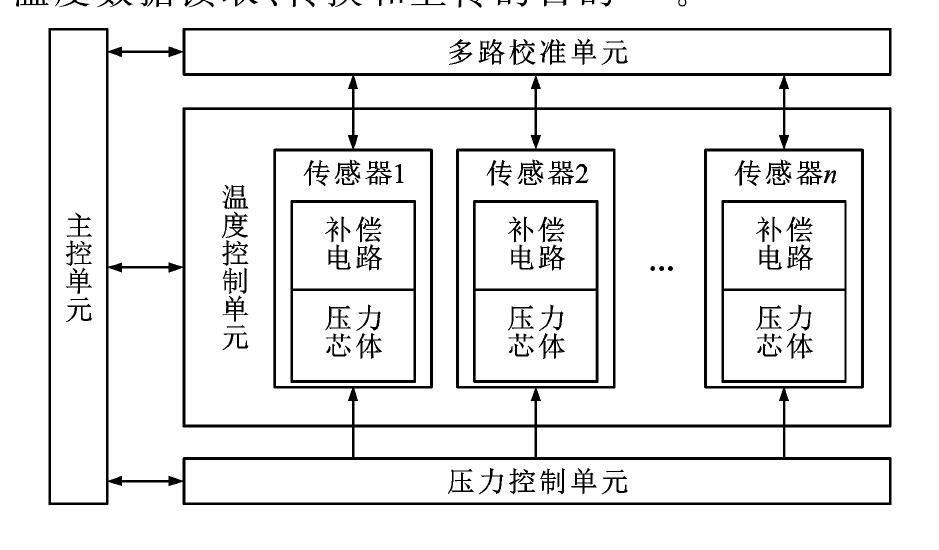
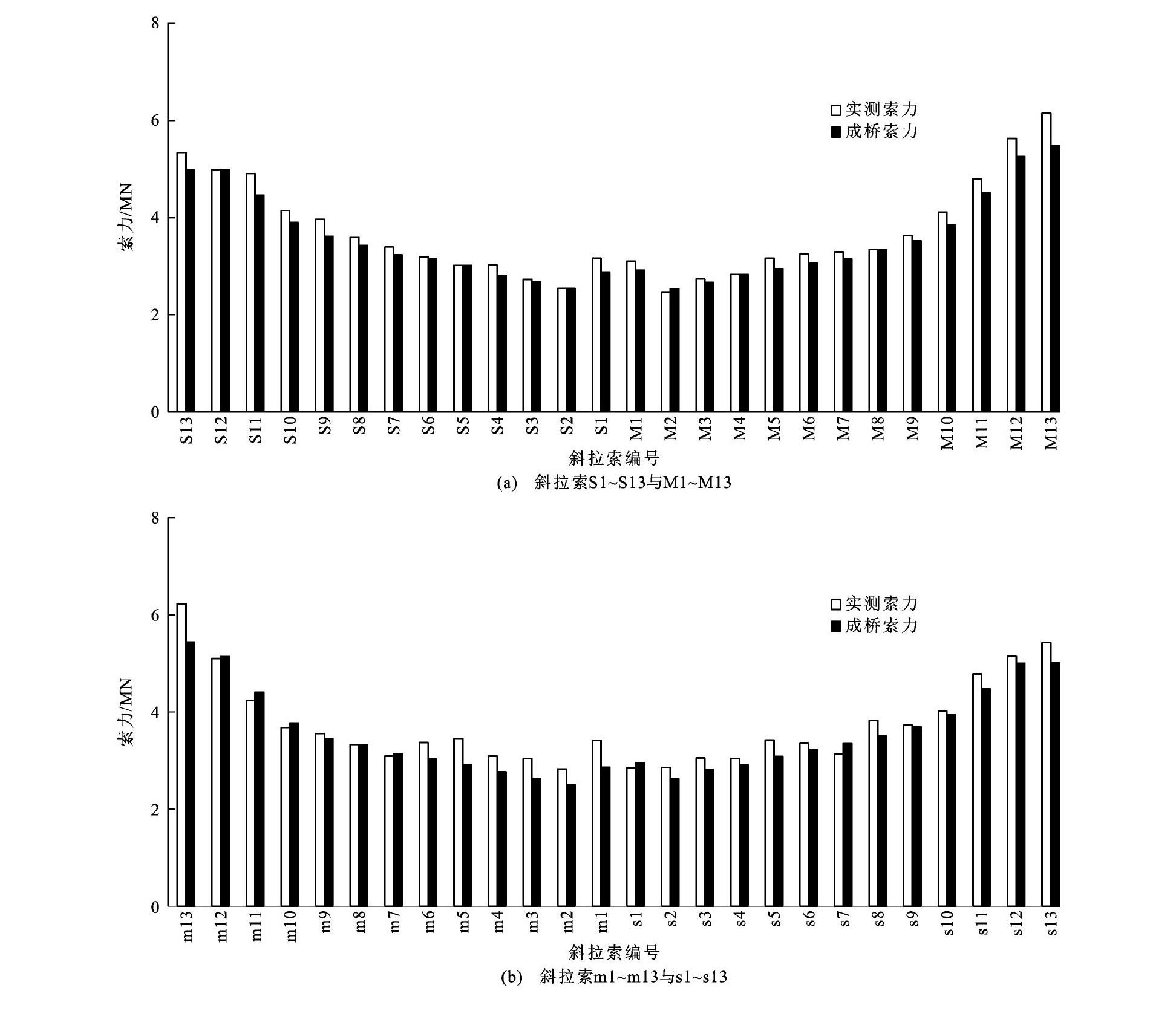
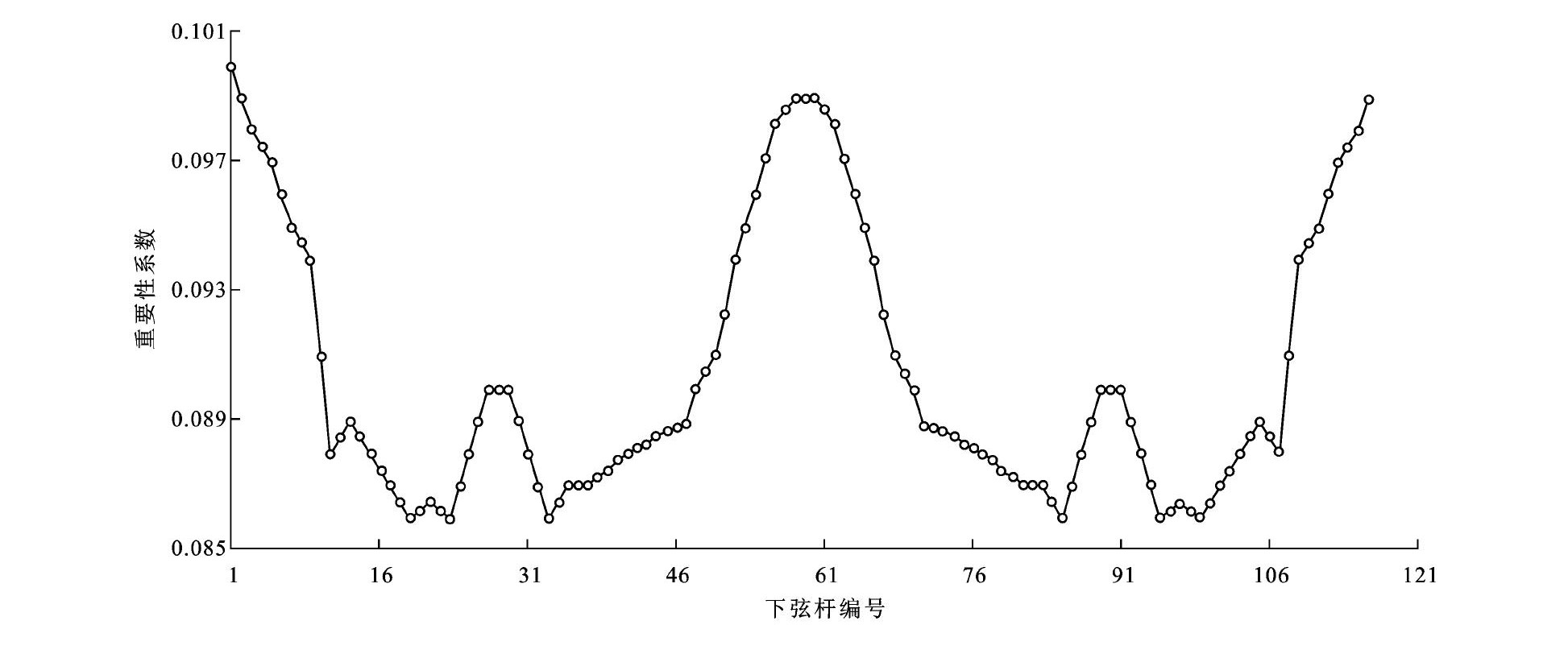
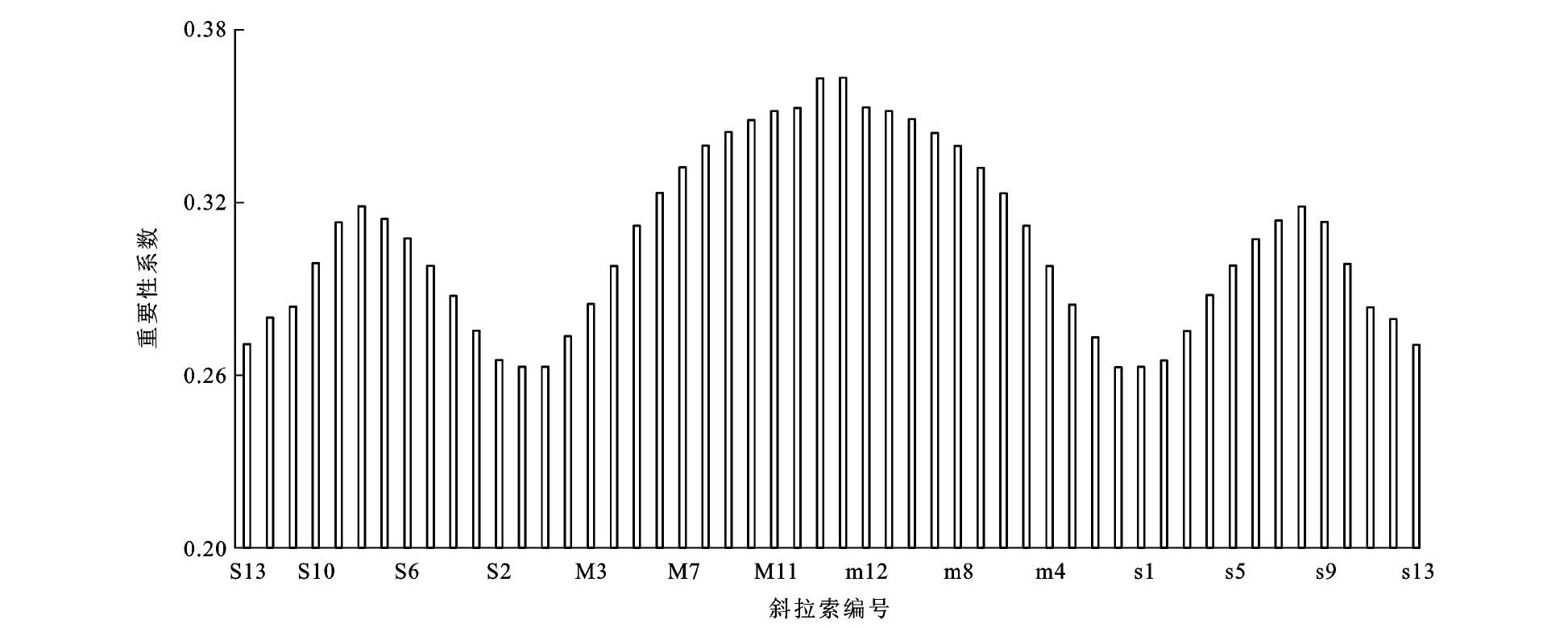
双塔钢桁斜拉桥结构强健性计算方法
郑小博
,
赵煜
,
贺拴海
,
张岗
摘要:
为了确保双塔钢桁斜拉桥的结构强健性, 依托新疆果子沟大桥, 基于现场结构试验, 开发了全方位多点温度补偿系统, 测量了特定加载工况下钢桁主梁应变、挠度与斜拉索索力增量, 确定了钢桁主梁与斜拉索重要构件的具体位置; 基于试验结果, 借鉴广义结构刚度理论, 采用桥梁结构有限元模型分析了斜拉桥弦杆与斜拉索的重要性系数, 研究了桥梁最不利破坏模型。研究结果表明: 各工况下钢桁主梁应变实测数据规律性较好, 钢桁主梁应变与挠度的实测值与理论计算值的比值小于1.0, 表明主梁承载能力与抗变形能力符合设计要求, 具有足够的安全储备; 主梁在各工况下的最大挠度均发生在中跨跨中, 达到237mm, 具有较强抗变形能力; 斜拉索索力增量实测值与理论计算值的比值小于1.0, 表明斜拉索具有一定的安全储备; 钢桁主梁控制截面处弦杆与特定斜拉索为重要性系数较高的构件, 斜拉索的重要性系数大于弦杆的重要性系数, 其中弦杆的重要性系数分布集中于主塔附近与中跨跨中; 通过斜拉索重要性系数的分布可知单根斜拉索的破损不会造成整体结构的坍塌, 但多于2根斜拉索失效可能会导致整体结构的连续倒塌; 主跨最长斜拉索和中跨跨中、边跨支座处与靠近主塔处弦杆失效对于整体结构较为不利。
更多>
2017, 17(5): 27-38.
摘要
(
192
)
HTML
(
123
)
PDF (1431KB)
(
0
)
引用
(
)
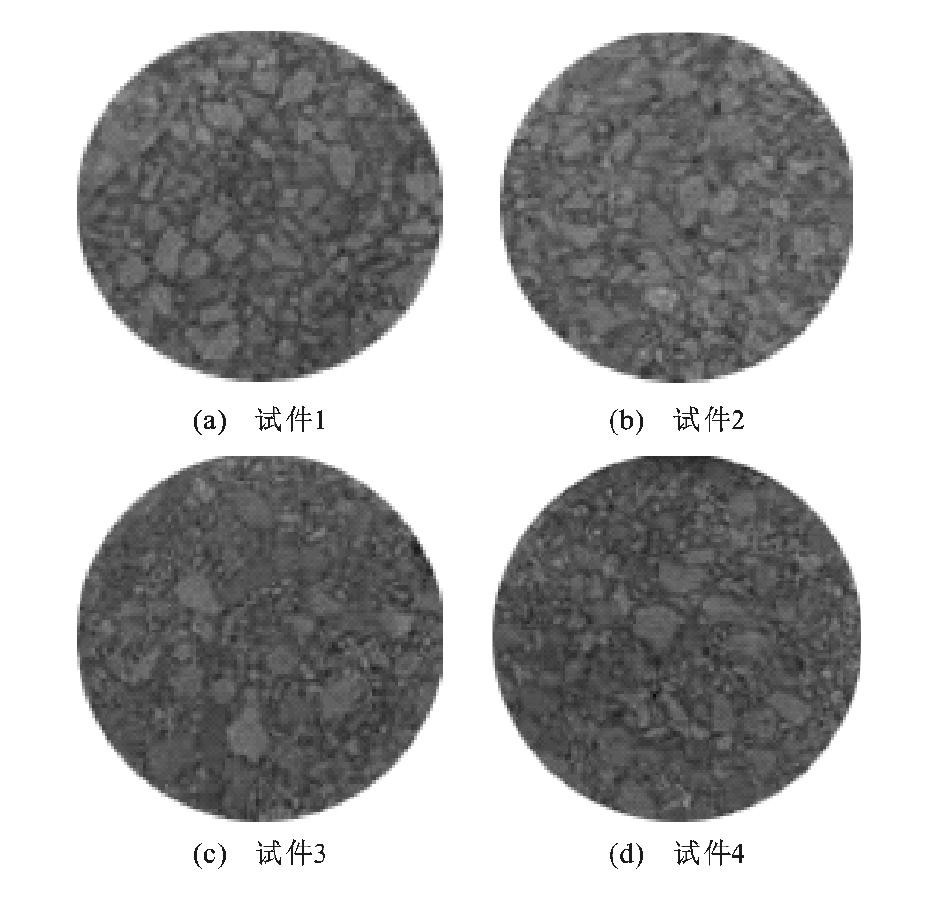
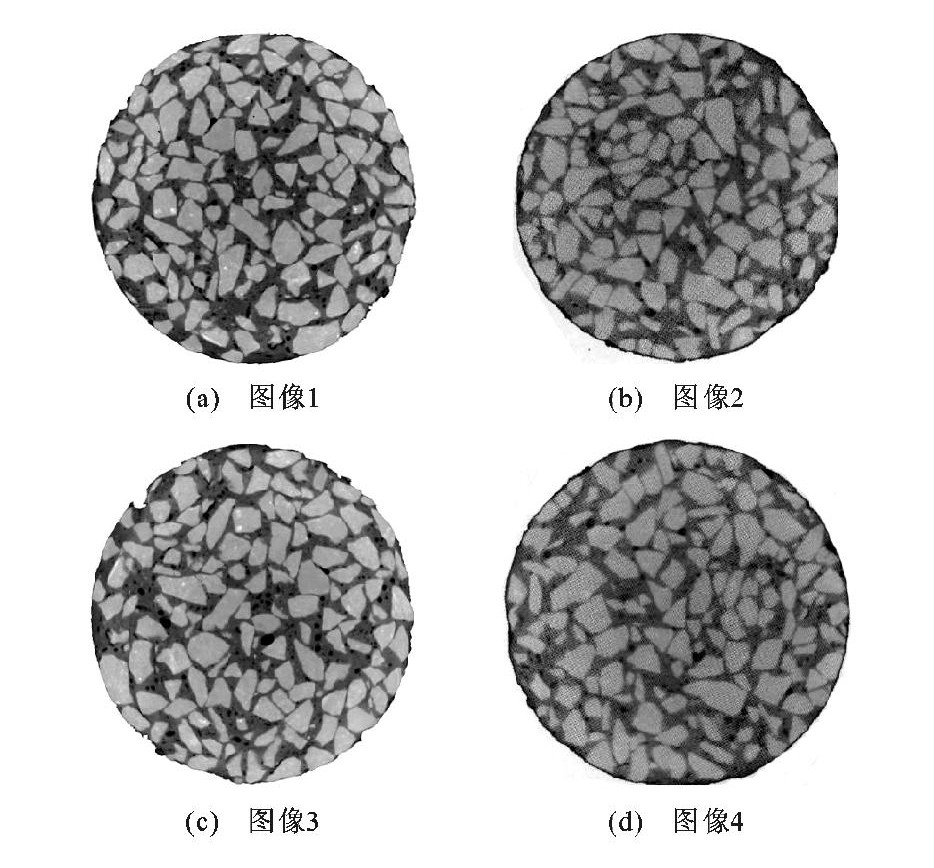
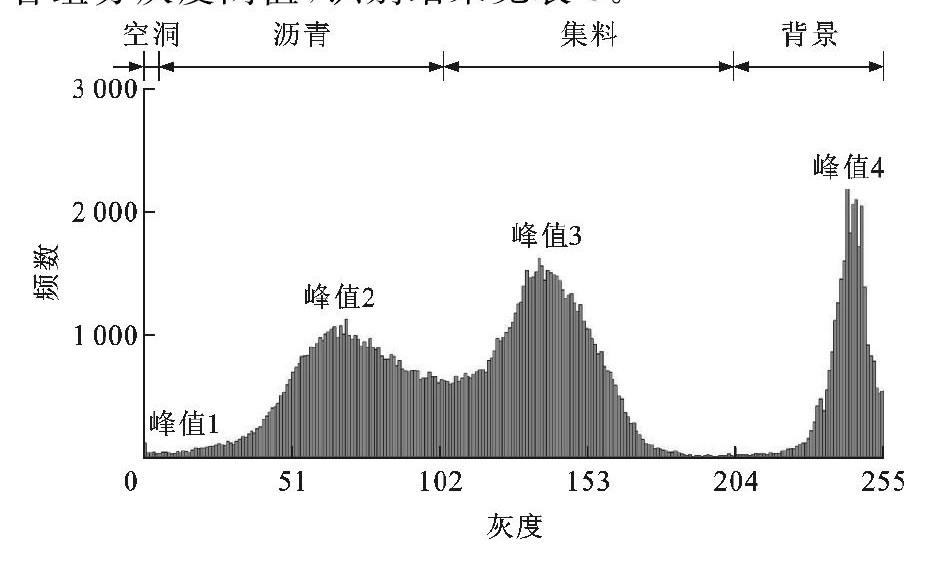
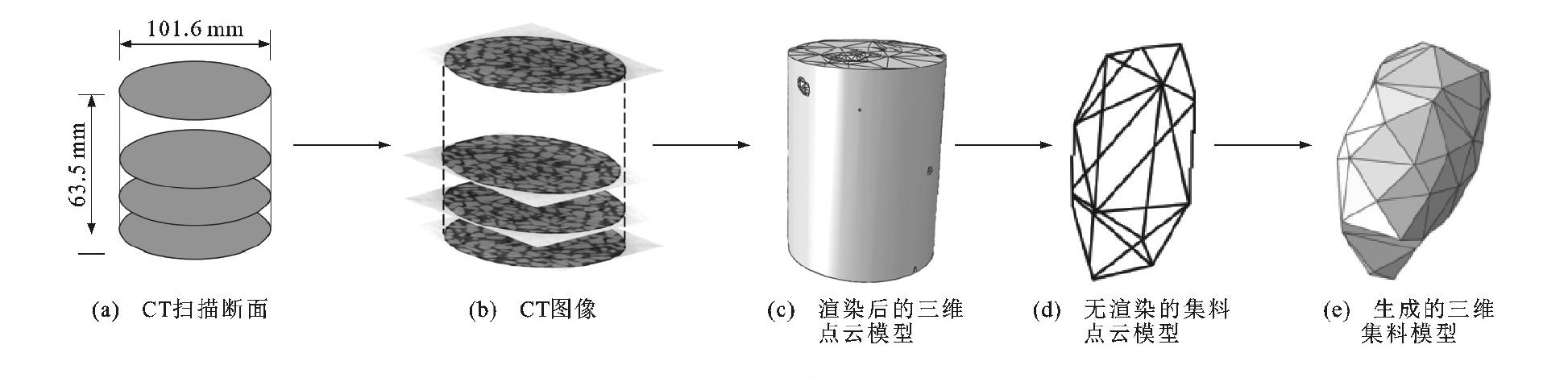
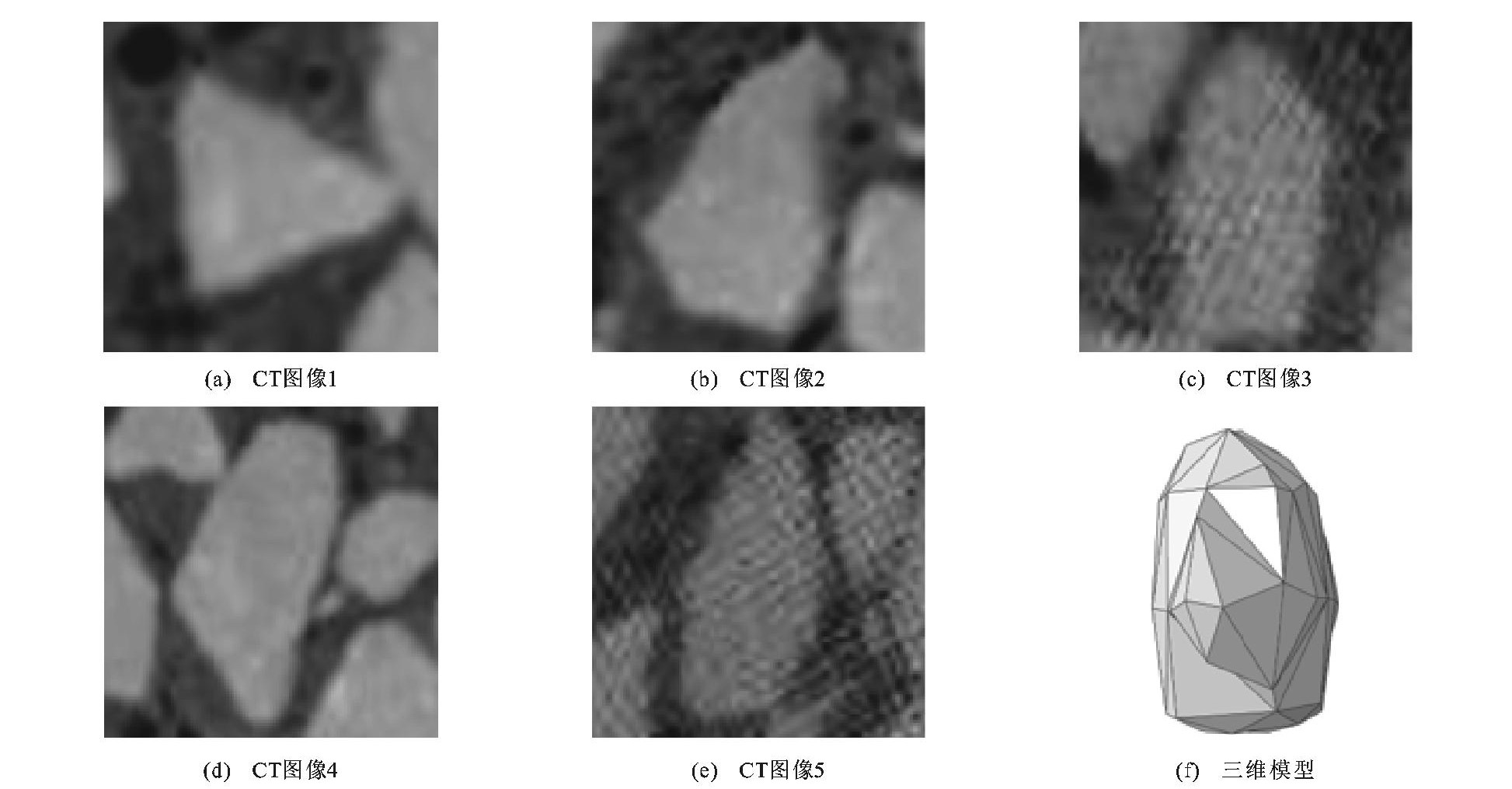
基于CT图像的集料三维棱角性计算方法
崔喆
,
张生瑞
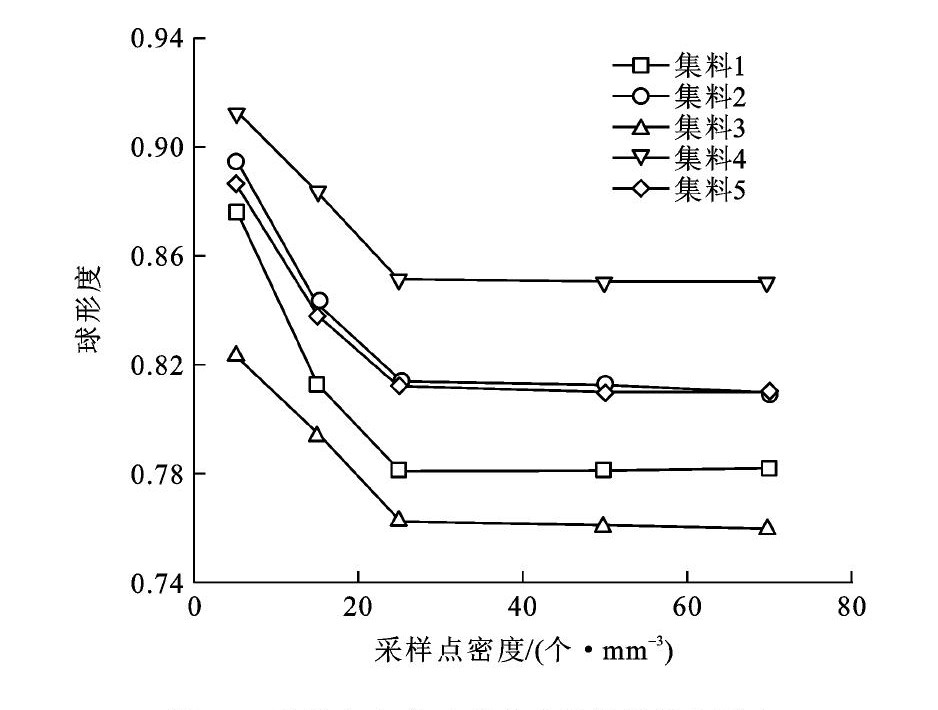
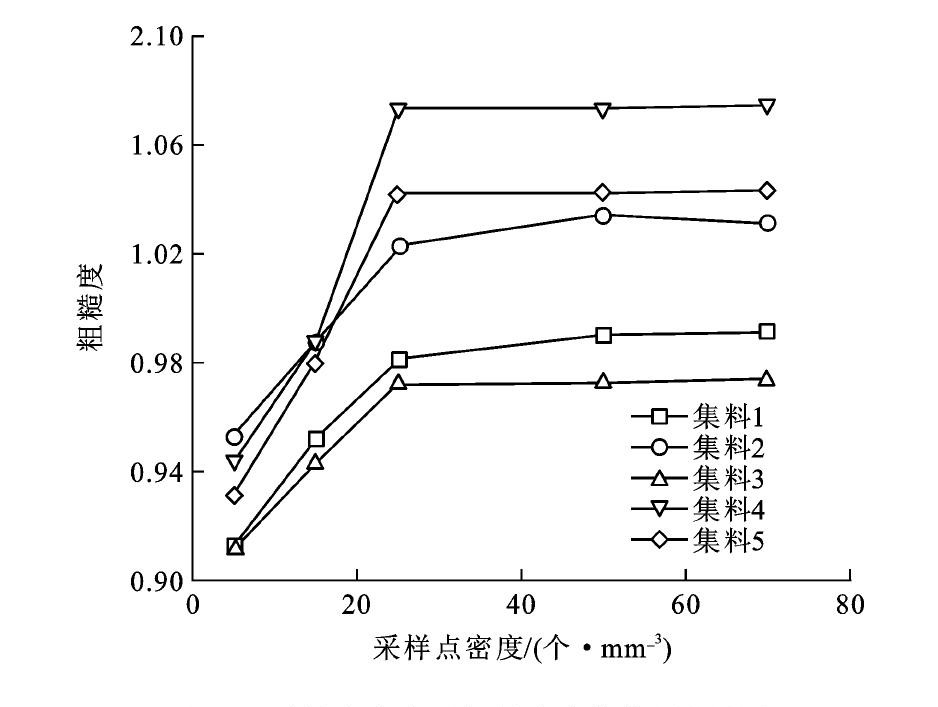
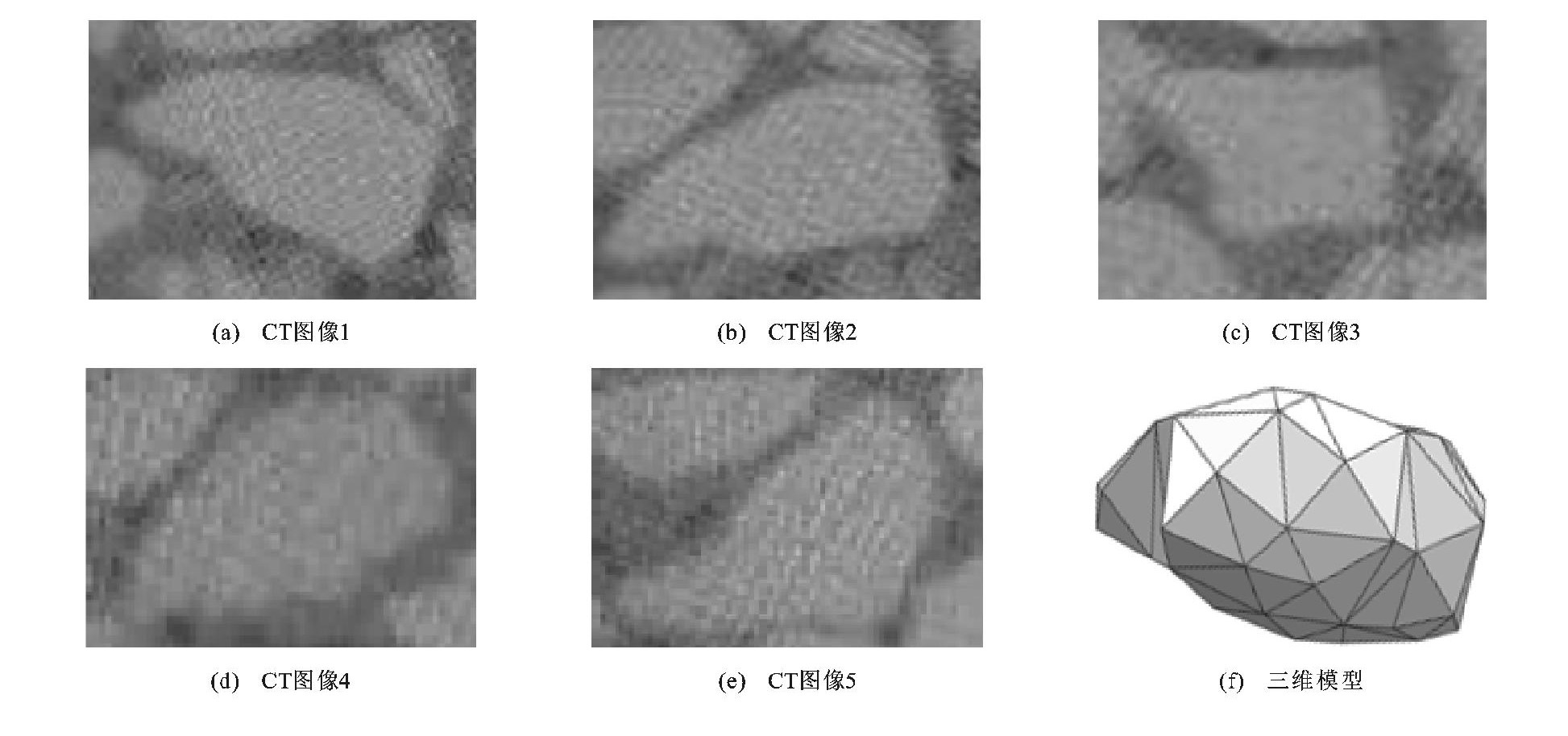
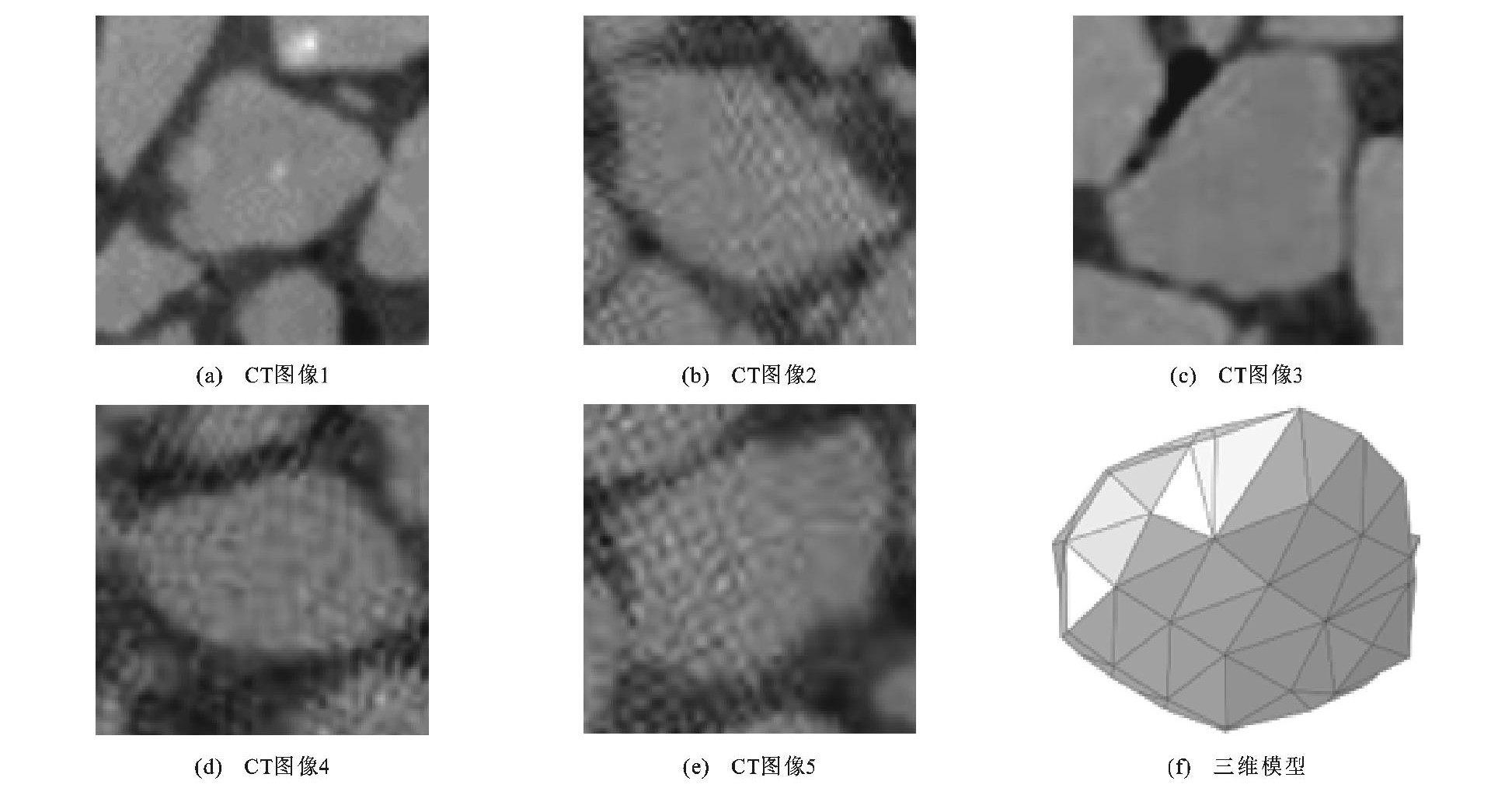
摘要:
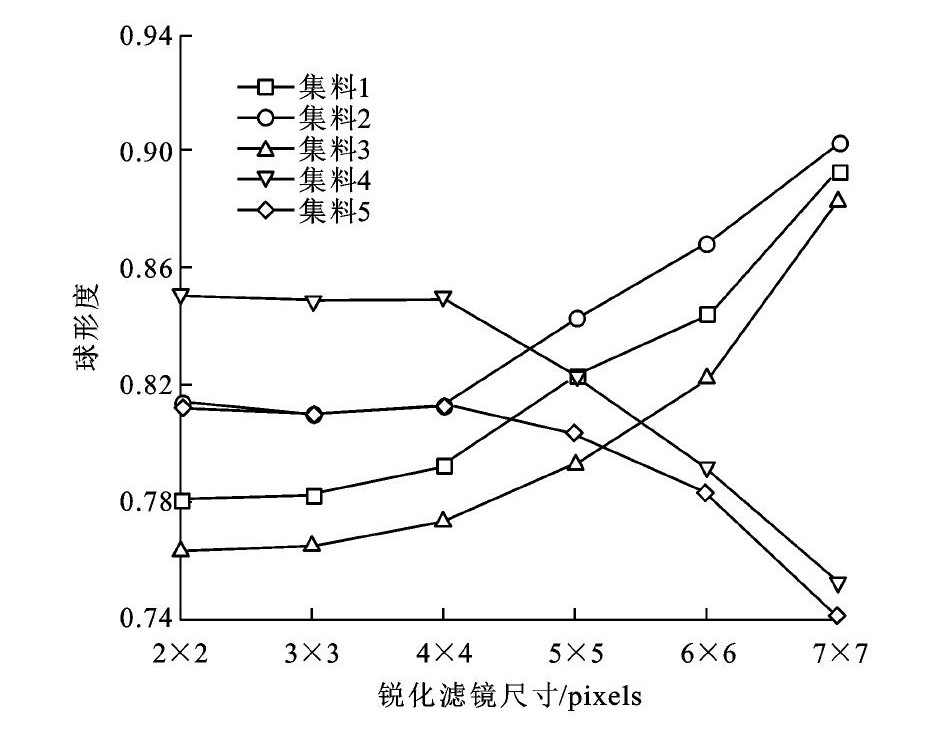
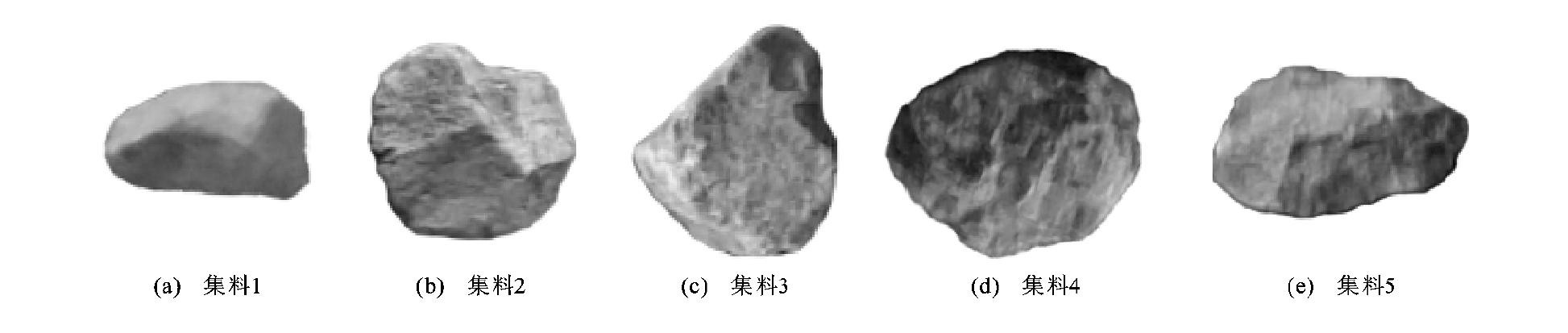
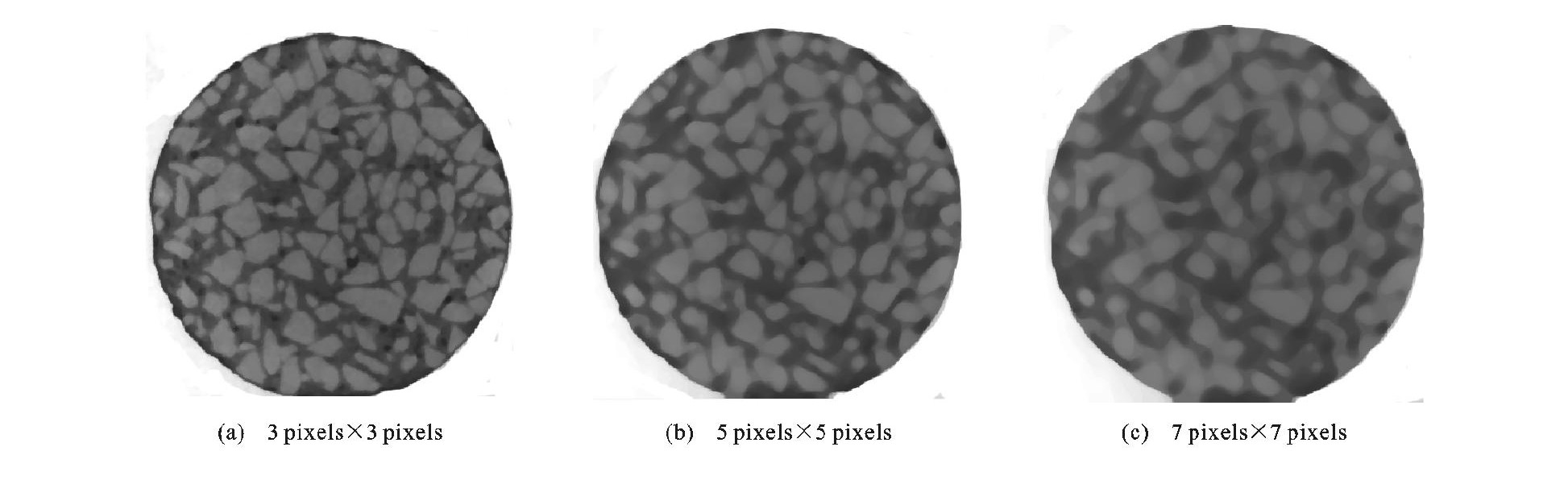
为了提高集料棱角性评价的准确性, 提出了集料三维棱角性计算方法; 基于CT技术和三维重建技术, 对集料的CT图像进行增强和锐化滤镜处理, 以突显沥青混合料中的集料; 对增强后的CT图像进行灰度阈值计算与灰度划分, 采用MIMICS重构了马歇尔试件中集料的三维模型; 提出了集料粗糙度与球形度的评价指标, 依据集料三维模型评价了集料棱角性, 并分析了三维模型重建的影响因素。计算结果表明: 在AC-16马歇尔试件中, 集料、沥青和孔隙的灰度分别为101.32~170.14、4.32~101.32和0~4.32, 因此, 采用图像增强和锐化滤镜处理可以突显CT图像中的集料, 增强集料三维重建的准确性; 采用2pixels×2pixels、3pixels×3pixels锐化滤镜计算球形度标准差为0.000 7, 而采用5pixels×5pixels、6pixels×6pixels、7pixels×7pixels锐化滤镜计算得到的球形度标准差为0.042 3, 因此, 应当采用2pixels×2pixels或3pixels×3pixels锐化滤镜处理CT图像, 以确保球形度计算结果波动小; 采用50、70个·mm
-3
采样点密度计算粗糙度的标准差为0.001 6, 而采用5、15、25个·mm
-3
采样点密度计算粗糙度的标准差为0.034 9, 因此, 应当采用50~70个·mm
-3
采样点密度来保证集料三维模型精确地反映集料的真实状态; 采用5个CT截面图像计算的二维球形度和粗糙度的标准差为0.012 1~0.048 2, 存在较大变异性和偏差, 而采用基于三维集料模型的粗糙度计算方法得到集料1
5
的粗糙度分别为0.991 2、1.032 1、0.974 2、1.075 1、1.043 2, 集料1~5的平均二维粗糙度分别为0.994 1、1.023 9、0.988 3、1.097 5、1.060 8, 两者基本一致。可见, 基于三维集料模型的粗糙度和球形度计算方法充分考虑了集料的棱角性, 计算结果不受CT截面的影响, 计算结果不存在变异和偏差。
更多>
2017, 17(5): 39-49.
摘要
(
511
)
HTML
(
130
)
PDF (4137KB)
(
481
)
引用
(
)
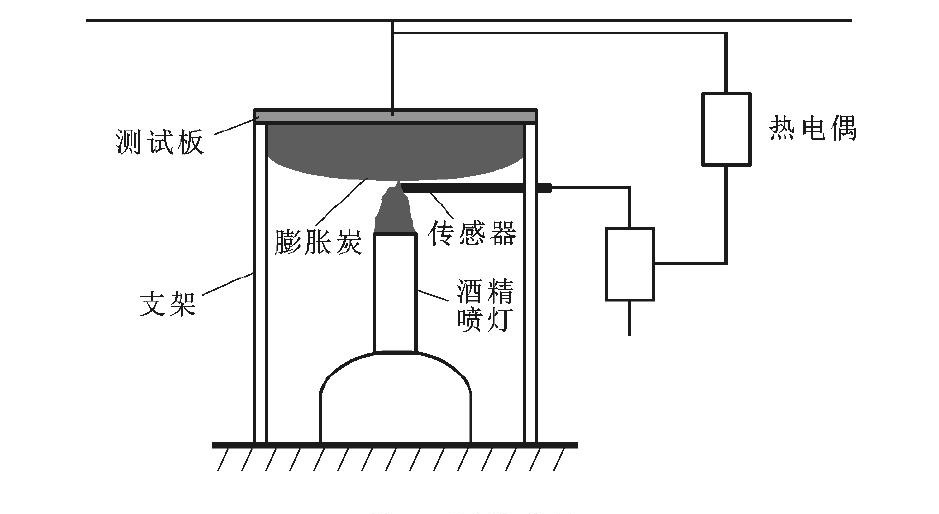
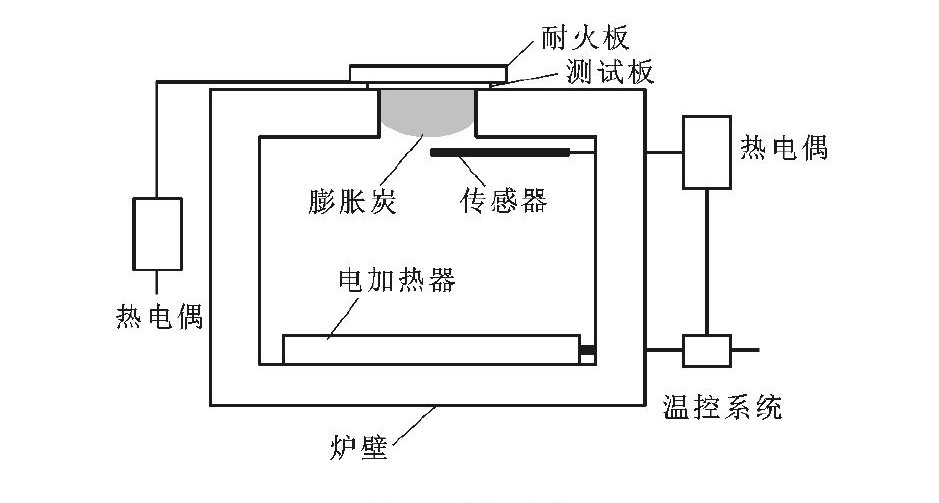
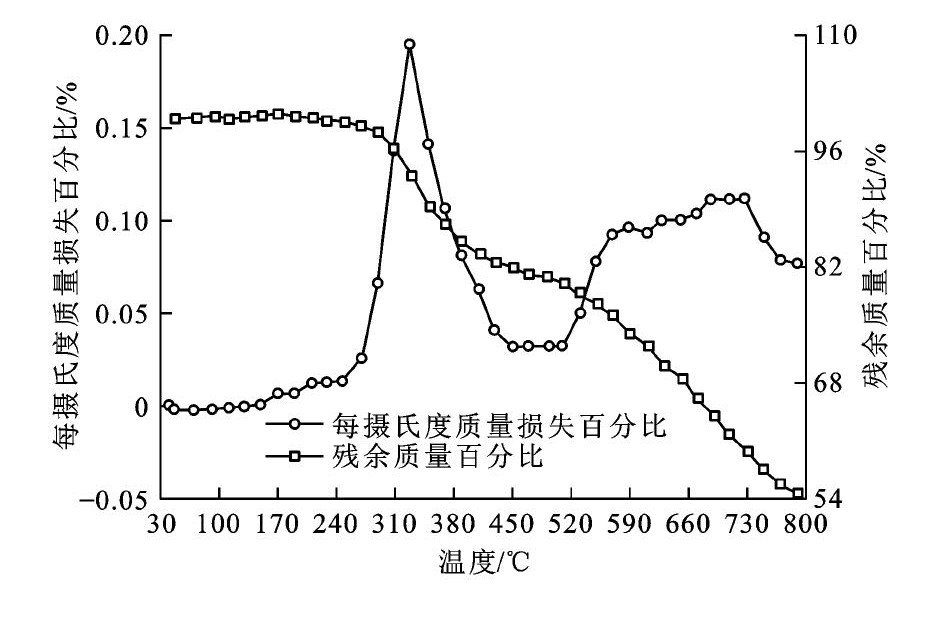
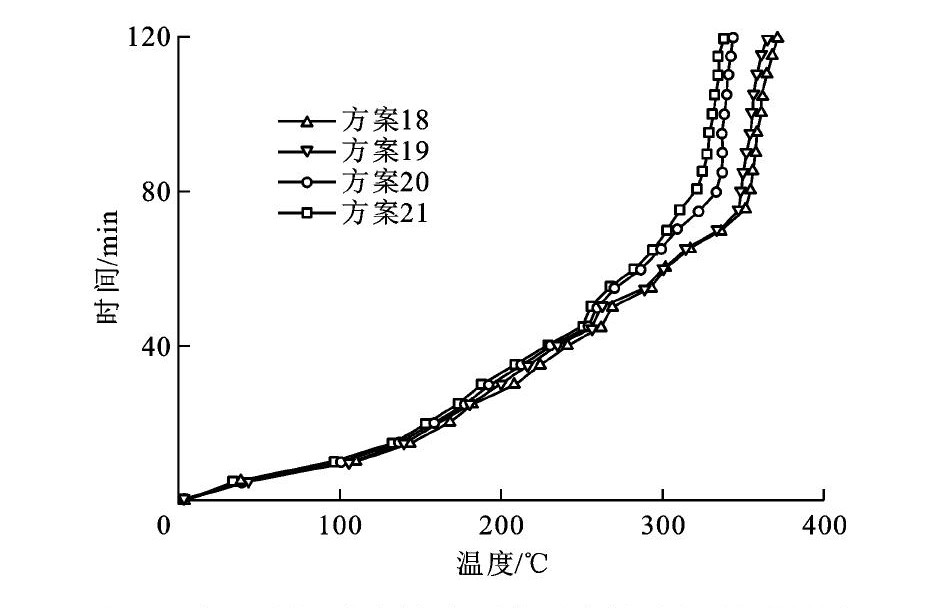
隧道表层抗污耐水型防火涂料的特性
景宏君
,
崔世富
,
艾涛
,
景宏伟
摘要:
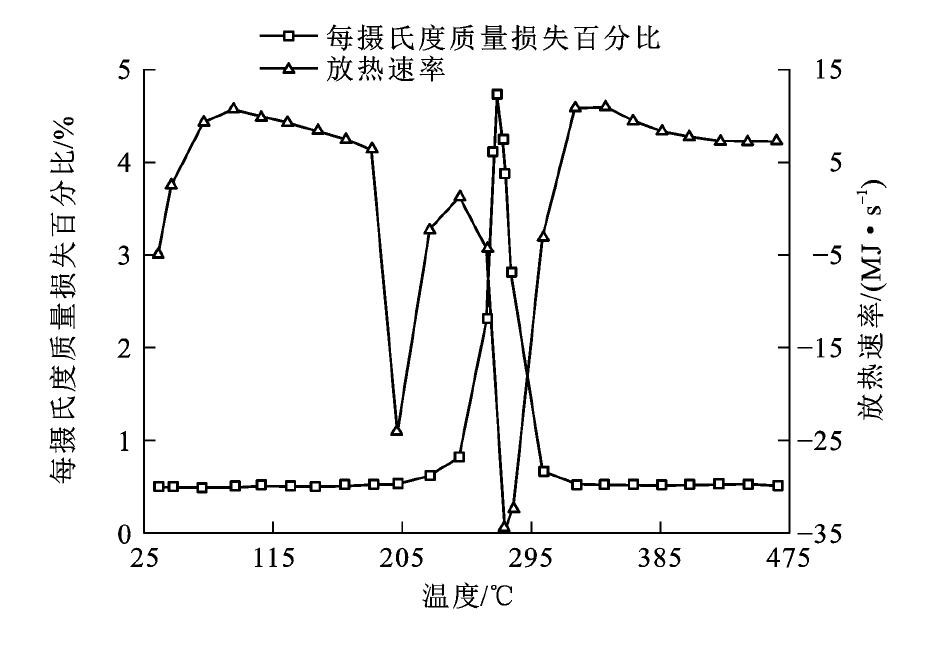
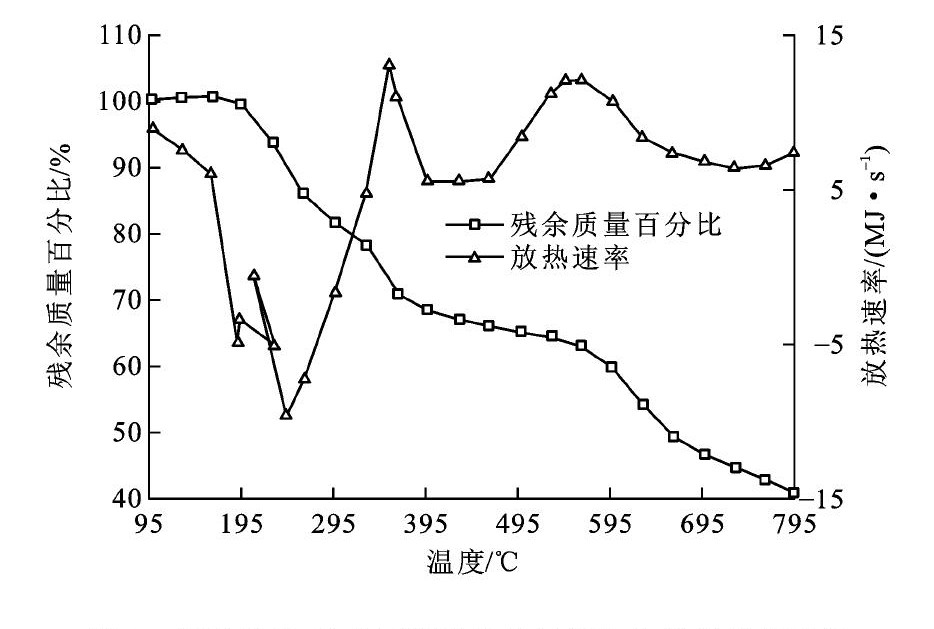
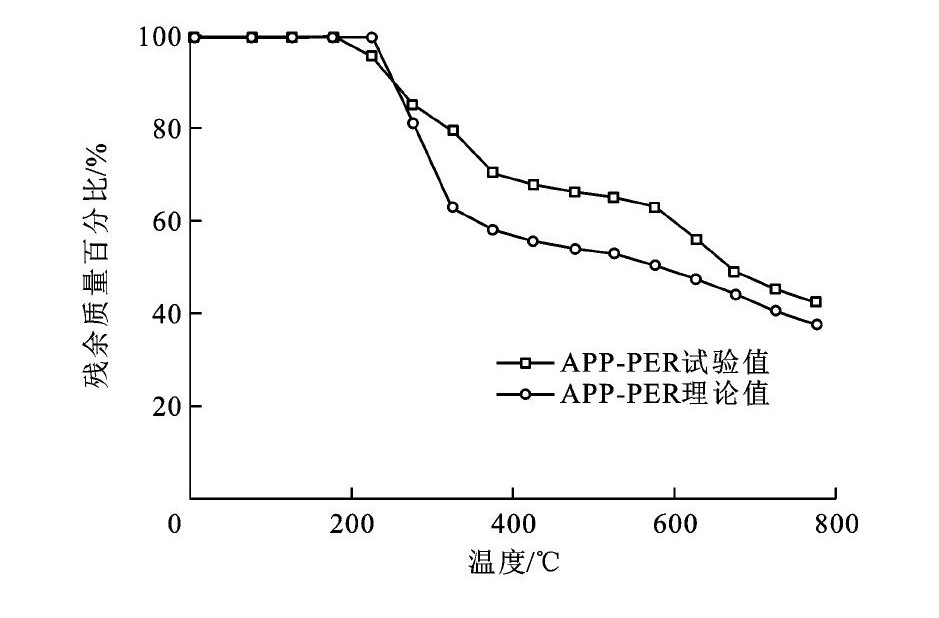
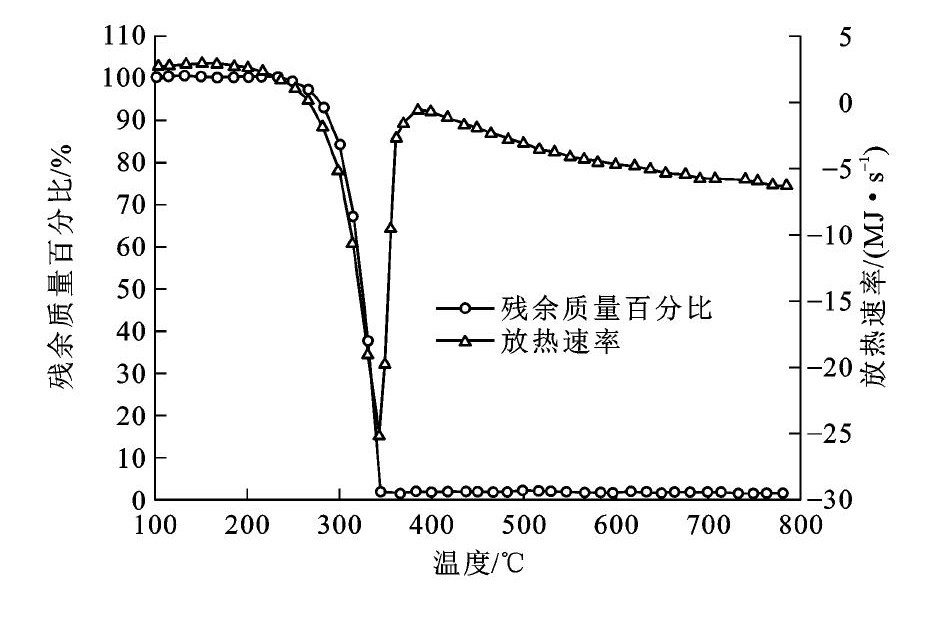
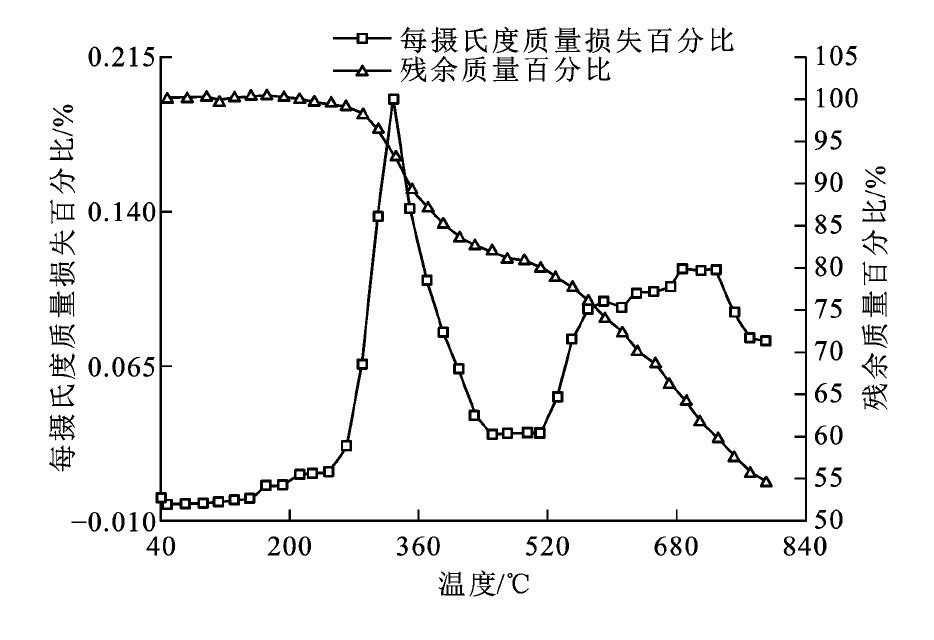
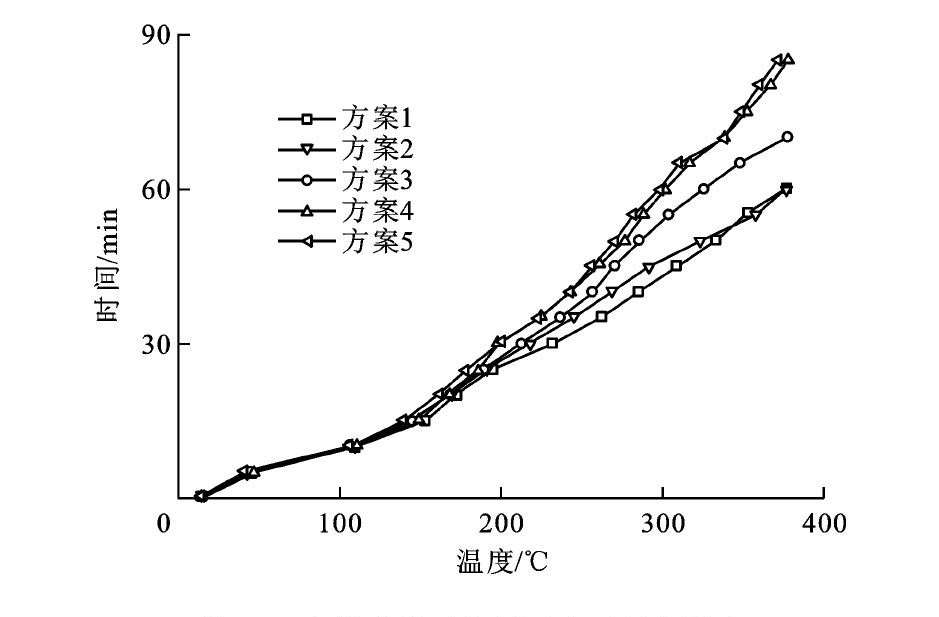
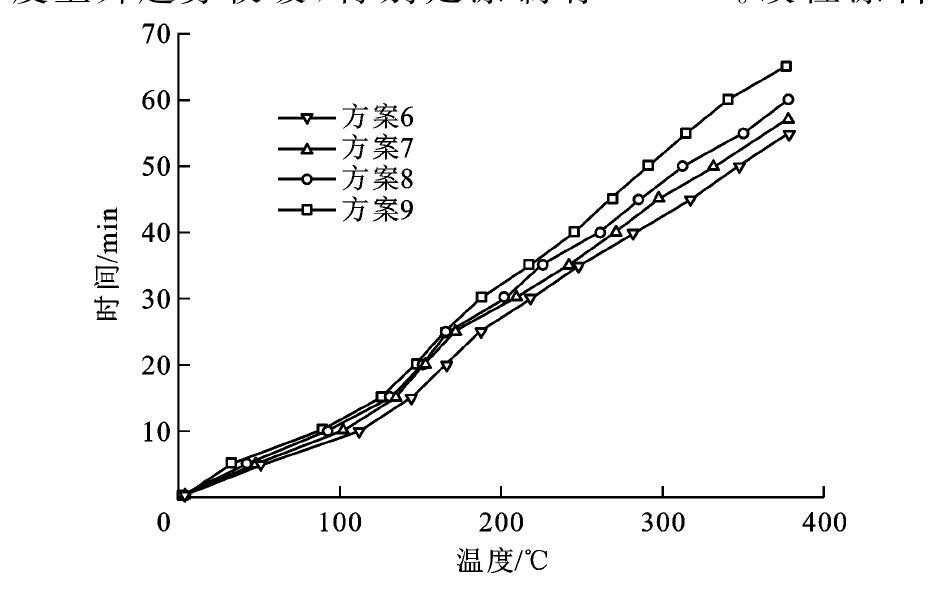
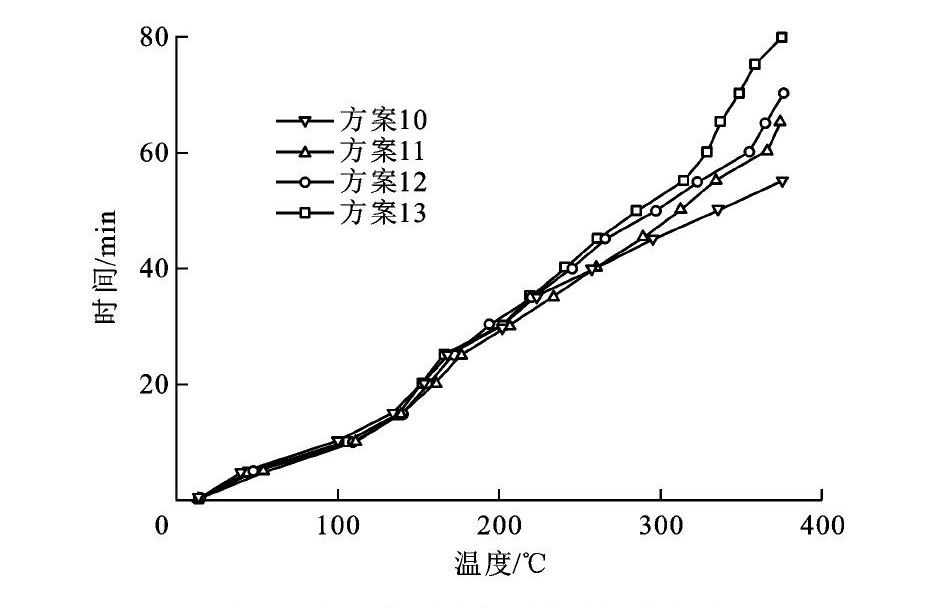
为了提高隧道表层防火涂料的抗污性和耐水性, 选用水性环氧树脂作为成膜剂, 有机硅烷、纳米二氧化硅和纳米二氧化钛作为抗污剂, 水镁石纤维作为无机阻燃剂, 聚磷酸铵(APP) /三聚氰胺(MEL) /季戊四醇(PER) 作为有机阻燃体系, 用热分析法确定了有机阻燃体系各组分的合适比例, 通过耐火试验、热重分析、抗黏污试验与耐水性试验, 分析了纳米二氧化硅、纳米二氧化钛、有机硅烷对涂料抗污性的影响, 经过配方的筛选与优化试验, 综合耐火极限测试和微观分析结果, 开发出抗污耐水性优良的新型多功能防火涂料。分析结果表明: APP、PER和MEL的质量比为2∶1∶1时, PER在APP的催化作用下, 环氧树脂成炭温度峰值由331℃降至277℃, 270℃~800℃范围内环氧树脂残炭率提高约10%;APP-PER的成炭温度峰值比MEL的分解温度低约66℃, 比环氧树脂的成炭温度峰值低约100℃, 有利于形成隔热效果较好的膨胀炭质层; APP、PER与MEL作为阻燃体系时, 加入5%有机硅烷或加入3%纳米二氧化硅和5%纳米二氧化钛, 涂料的耐火时间分别为60min或80min, 当同时加入定量的有机硅烷、纳米二氧化硅和纳米二氧化钛时, 涂料的耐火时间可延长至100min, 再加入10%锡酸锌时, 涂料的耐火时间可进一步延长至120min, 表现出组分间显著的协同防火效应; 最终优选的膨胀型防火涂料配方为: 水性环氧树脂、有机硅烷、阻燃复合剂、固化剂、复合纳米粉、锡酸锌的质量比为40∶5∶33∶4∶8∶10, 该防火涂料耐污性水平为1级, 耐火极限时间超过120min, 浸水800h后无脱落与开裂现象。
更多>
2017, 17(5): 50-60.
摘要
(
467
)
HTML
(
117
)
PDF (1003KB)
(
550
)
引用
(
)
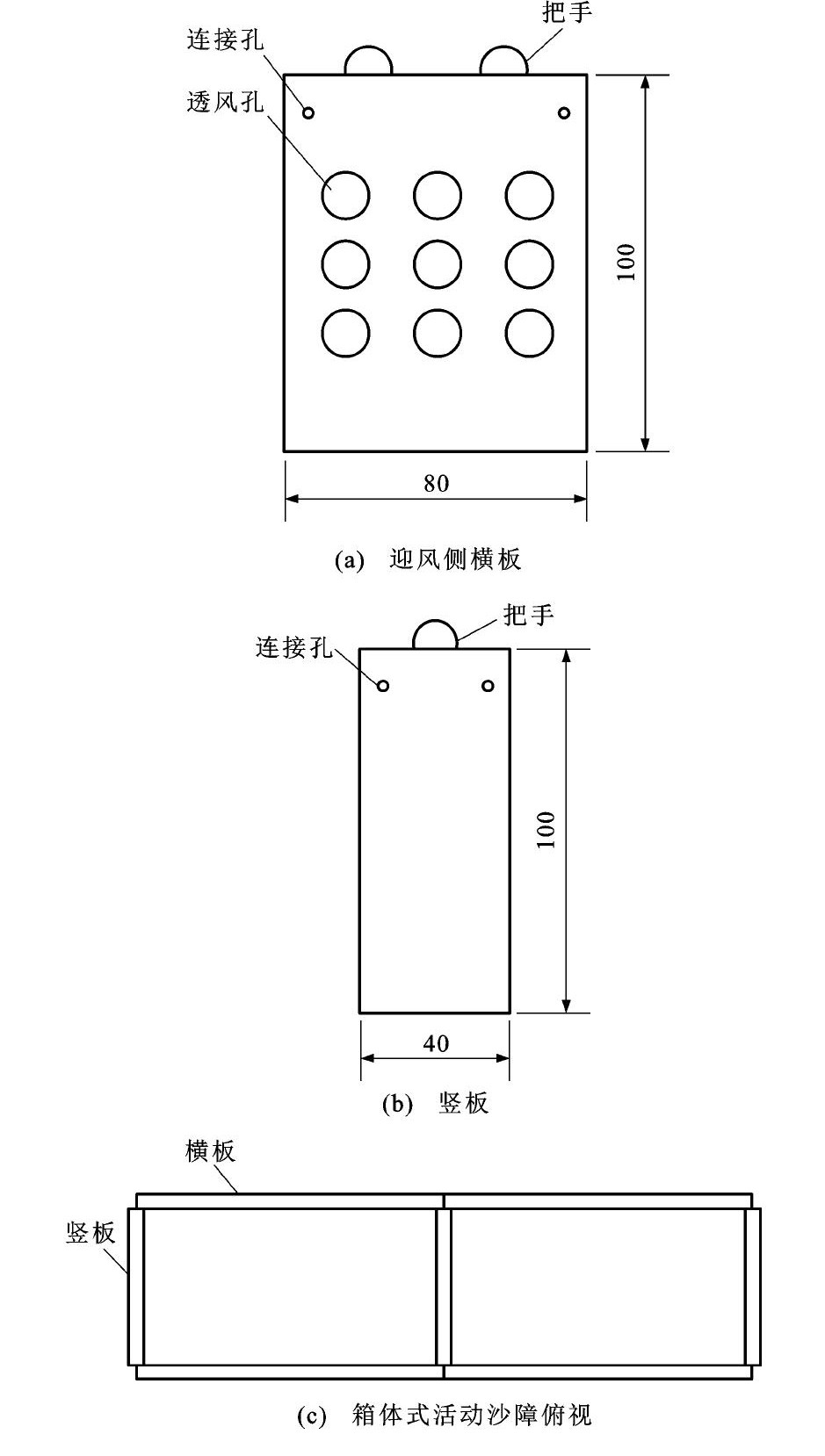
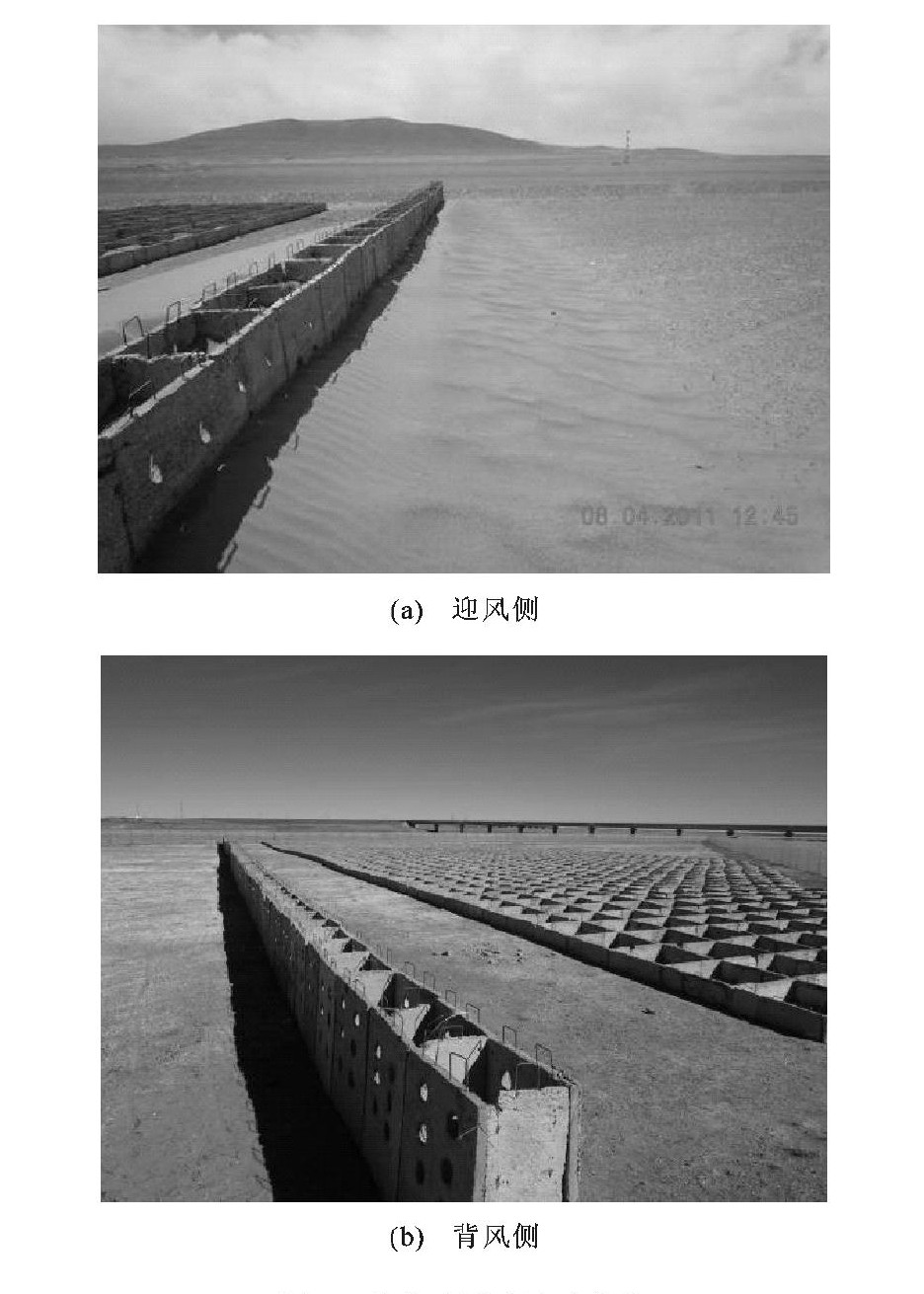
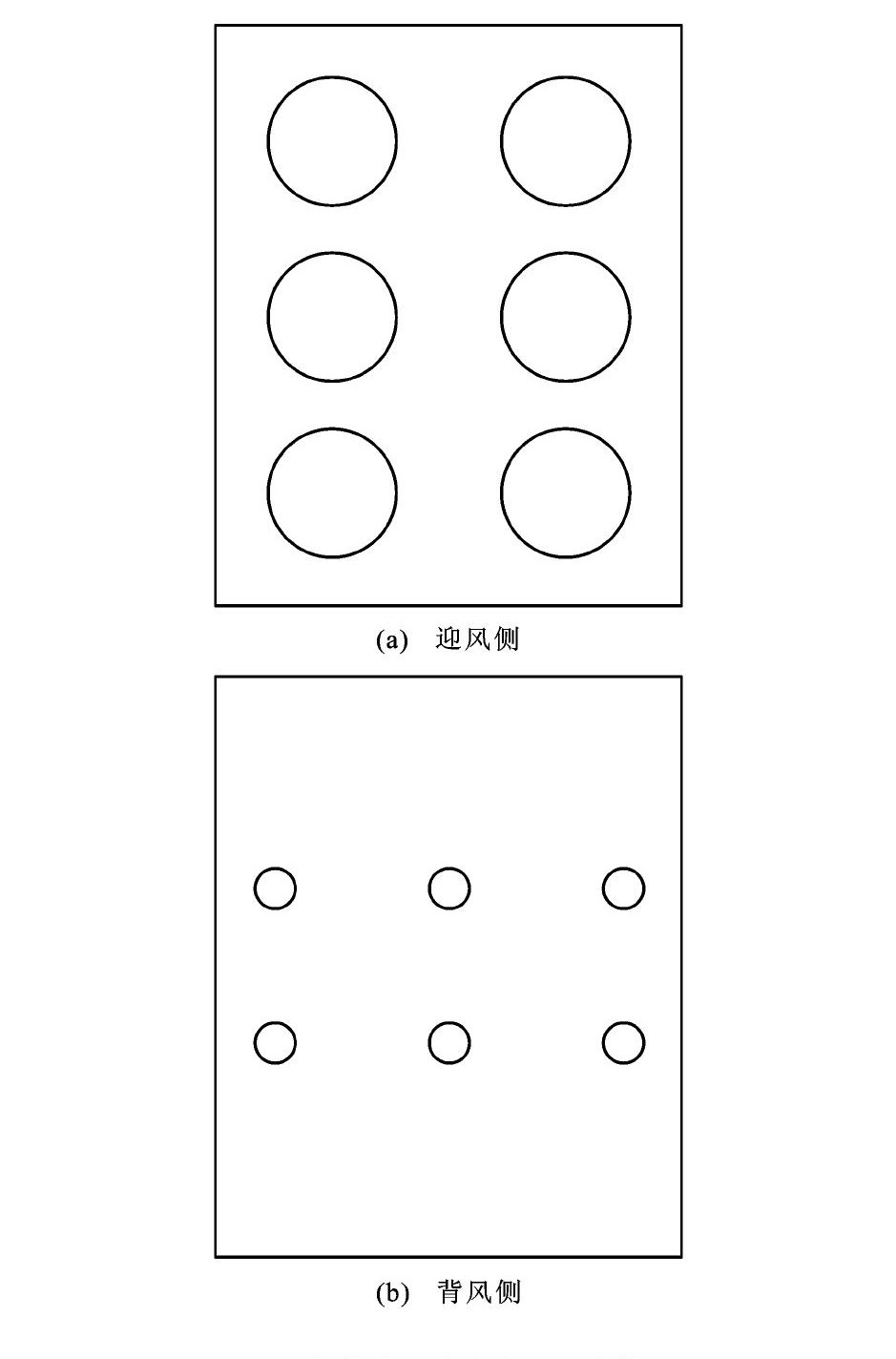
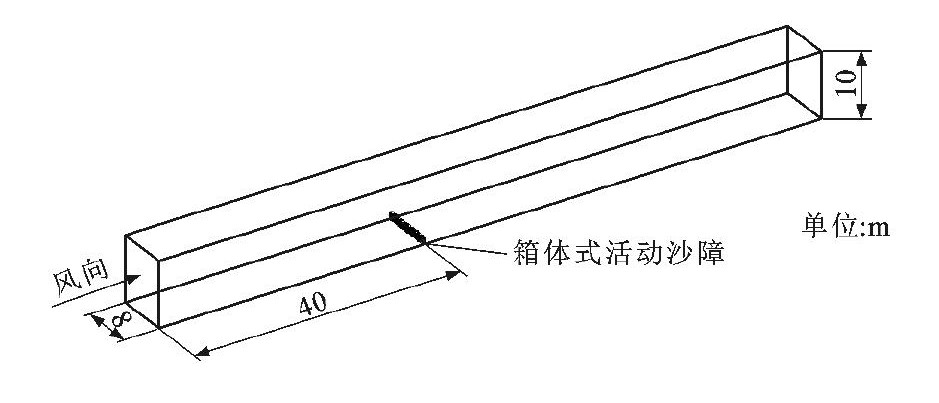
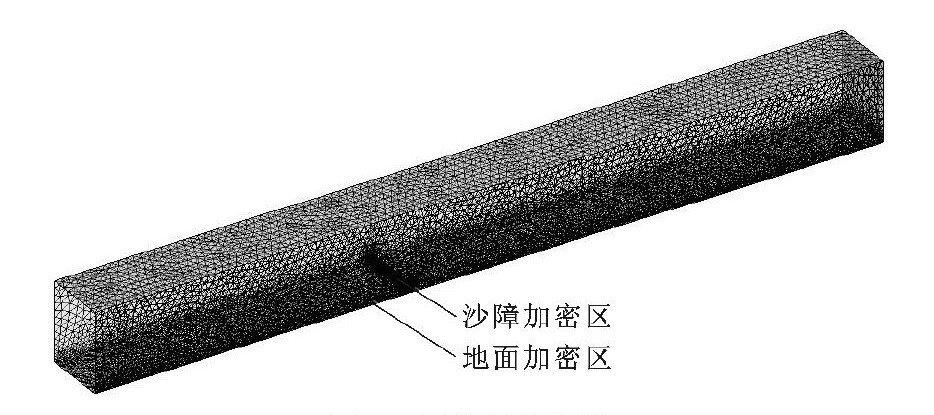
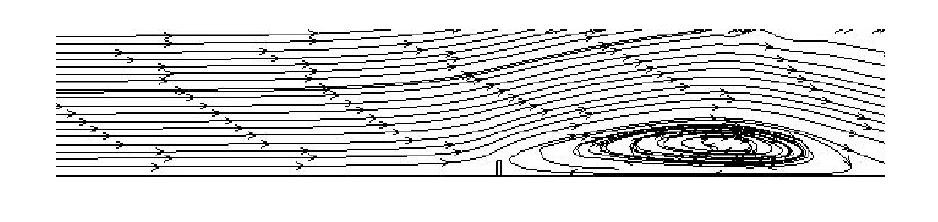
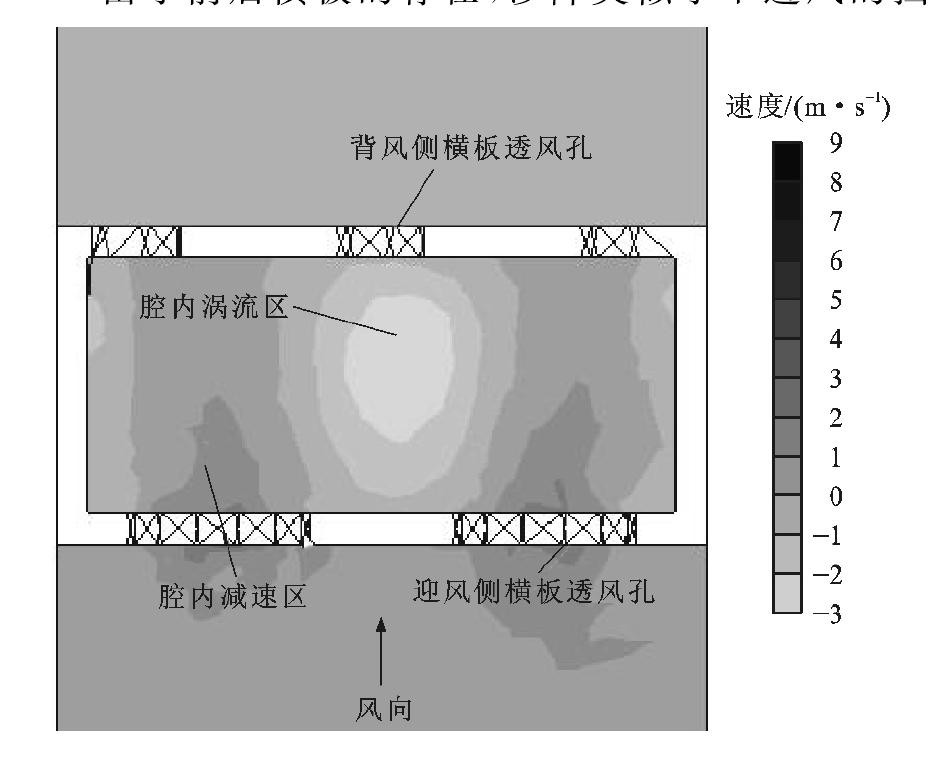
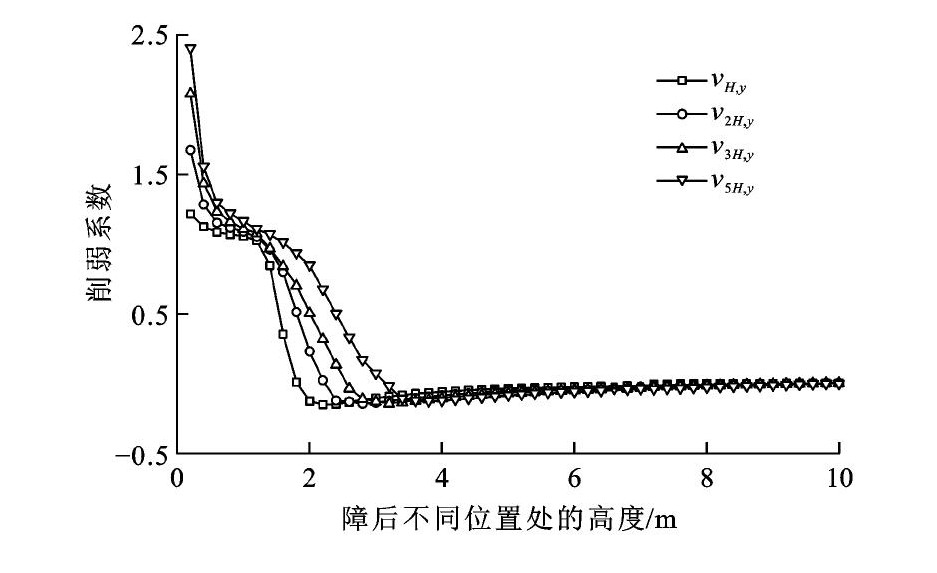
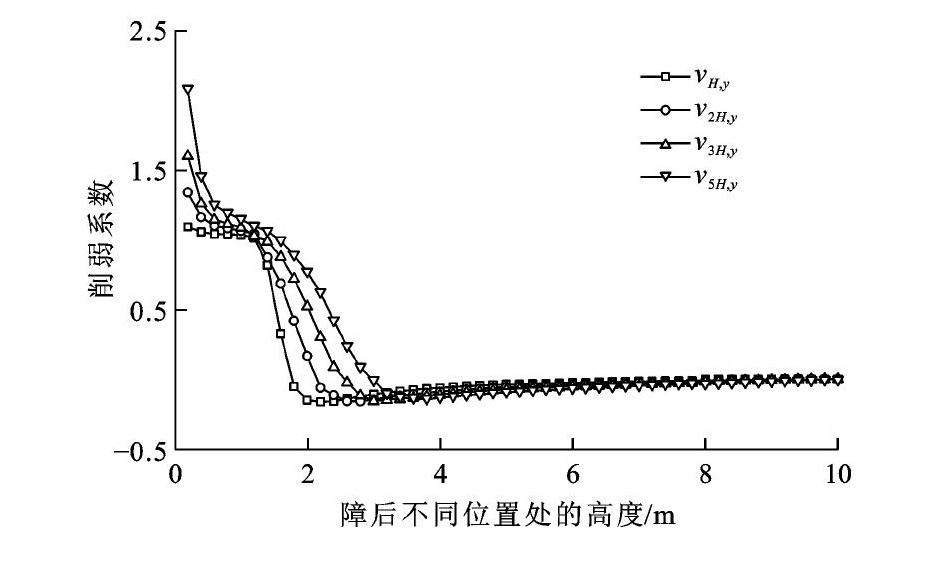
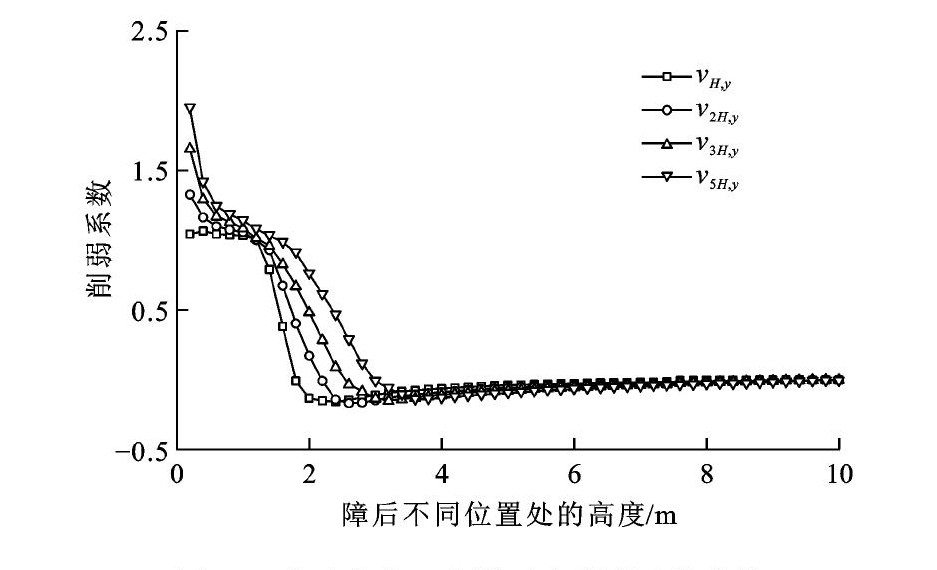
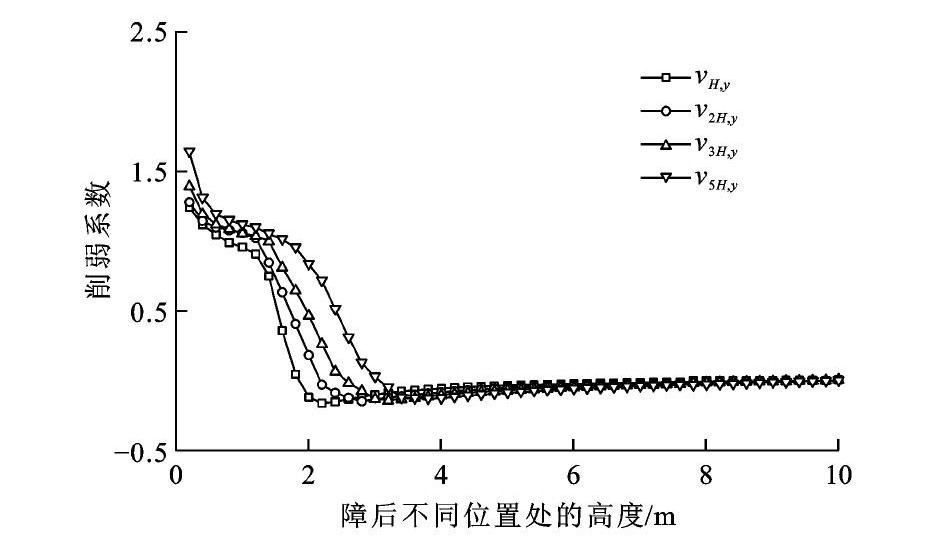
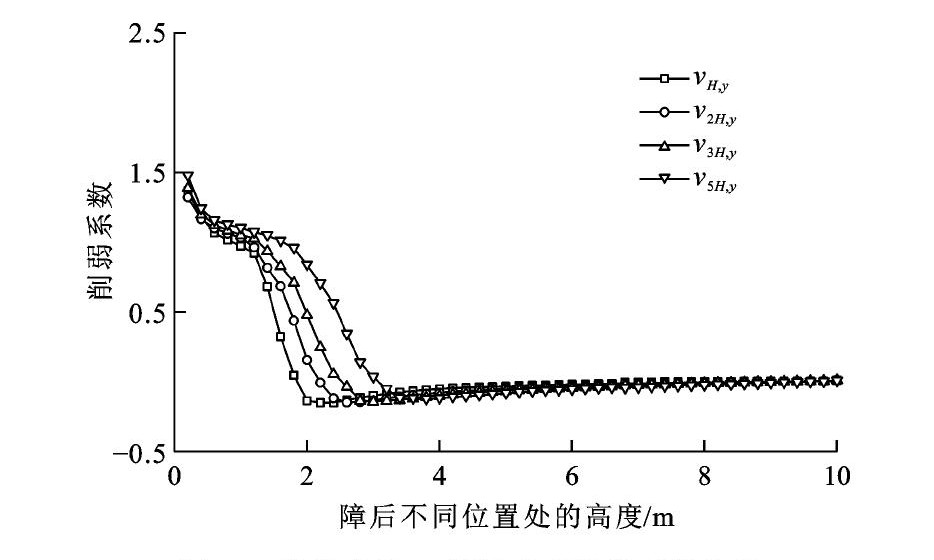
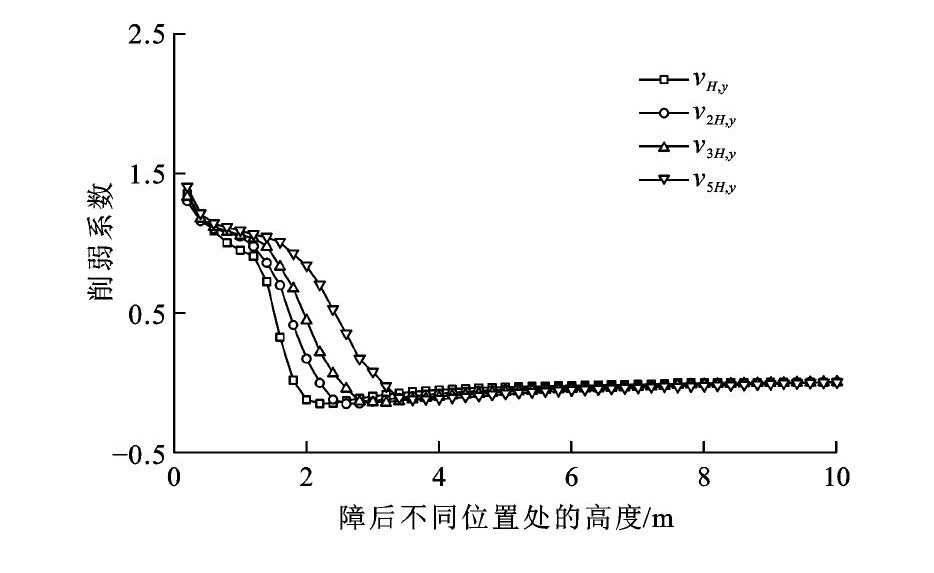
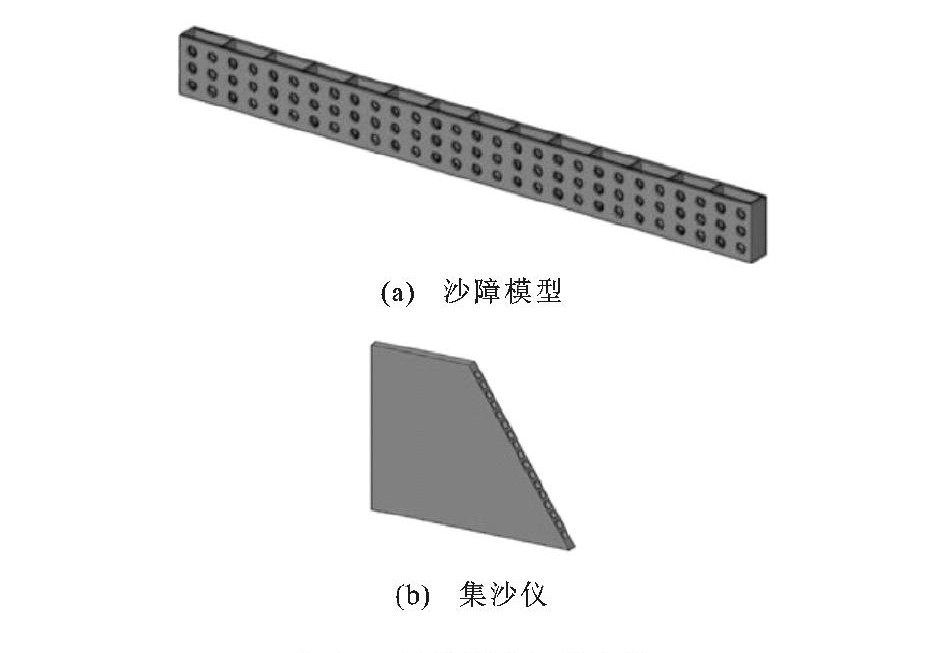
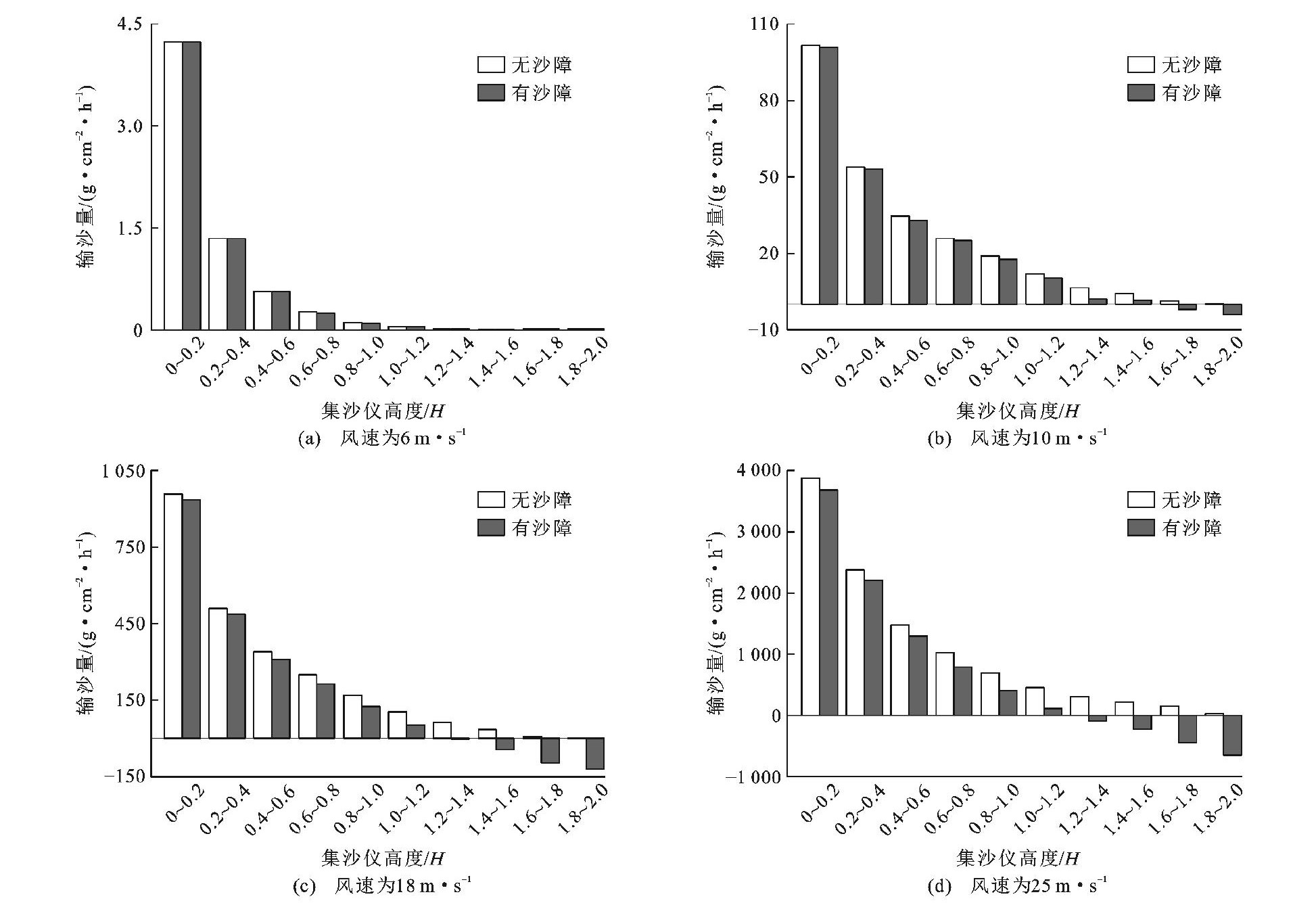
箱体式活动沙障风沙流场特征
程建军
,
智凌岩
,
薛春晓
摘要:
研究在野外调查的基础上, 采用计算流体力学三维数值建模方法并结合室内风洞试验, 分析了箱体式活动沙障在孔隙率与风速变化作用下的控沙特点及其周围风沙流场的演化过程。分析结果表明: 在沙障的控制下, 顺着风向在沙障前后依次出现减速区、减速上扬区、加速区与障后涡流区, 在沙障腔体内形成明显的腔内减速区与涡流区, 过境风沙流在沙障的减速区、障后涡流区与腔体内发生沉落, 可见箱体式活动沙障发挥了控沙作用; 随着风速增大, 障前减速上扬区高度增大, 但沙障迎风侧孔隙率的变化对减速上扬区高度没有影响; 当沙障迎风侧横板孔隙率小于5%时, 对来流的消减效果显著, 积沙在沙障前卸载, 不能充分发挥沙障背风侧涡流区的控沙作用; 当孔隙率大于25%时, 沙障能够充分发挥控沙作用, 在沙障的迎风侧、背风侧与腔体内都有积沙卸载; 当孔隙率继续增大至30%时, 沙障控沙效果没有明显提高; 选定孔隙率为30%条件下, 随着风速的增大, 沙障后积沙增加, 沙障腔体内积沙减少, 而沙障迎风侧积沙出现先增加后减少的变化趋势。
更多>
2017, 17(5): 61-70.
摘要
(
404
)
HTML
(
122
)
PDF (3533KB)
(
301
)
引用
(
)
载运工具运用工程
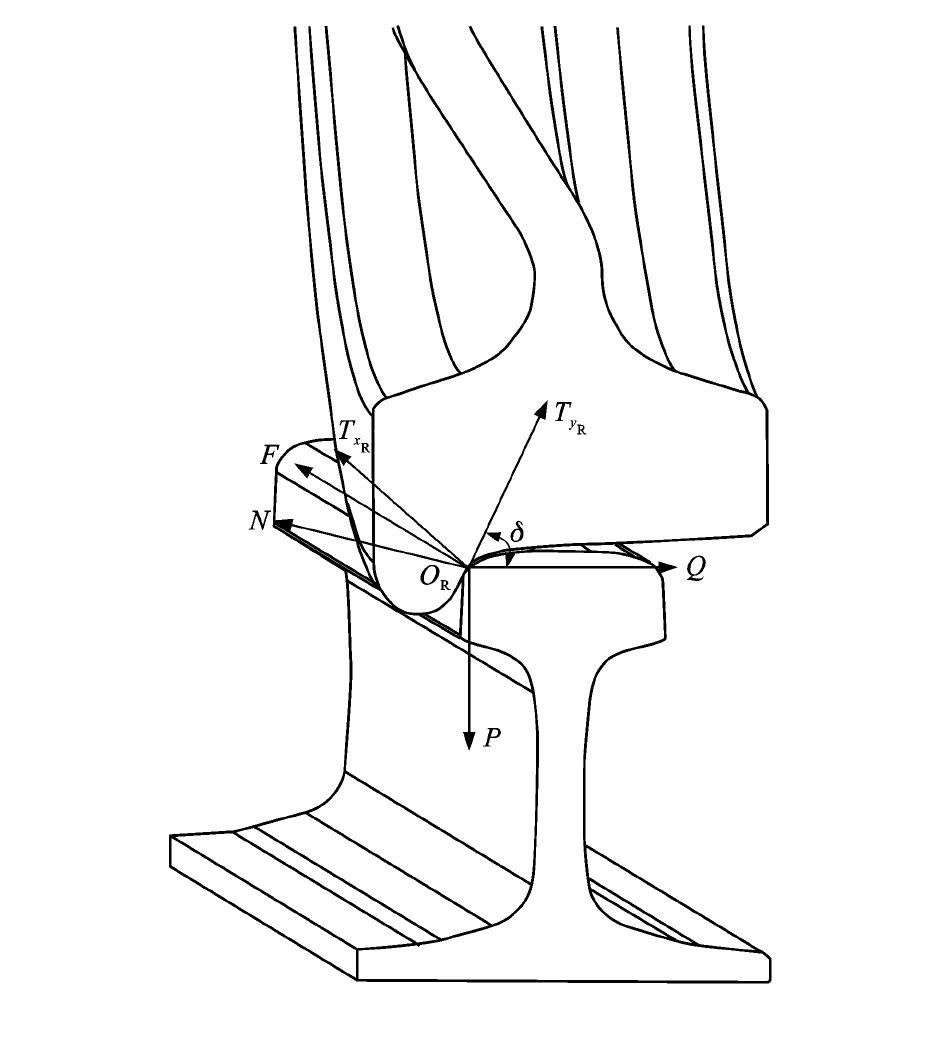
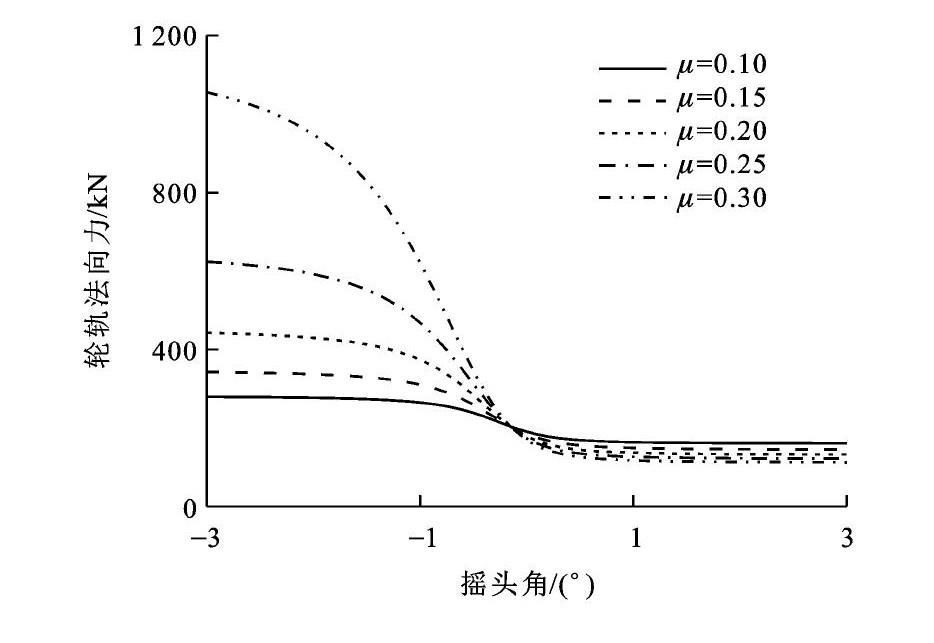
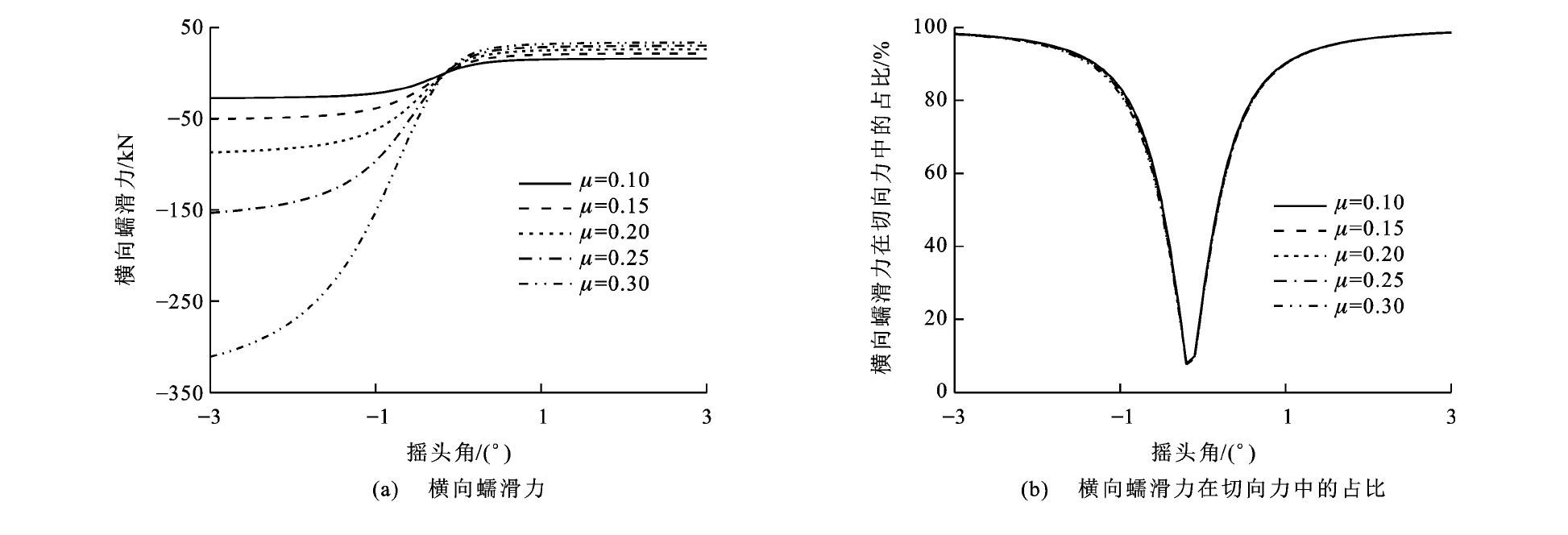
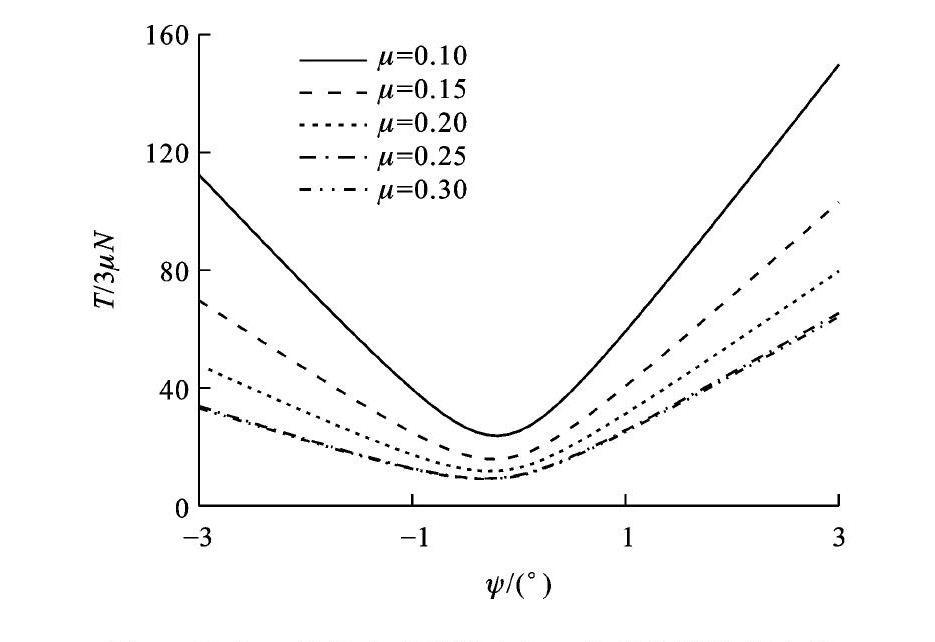
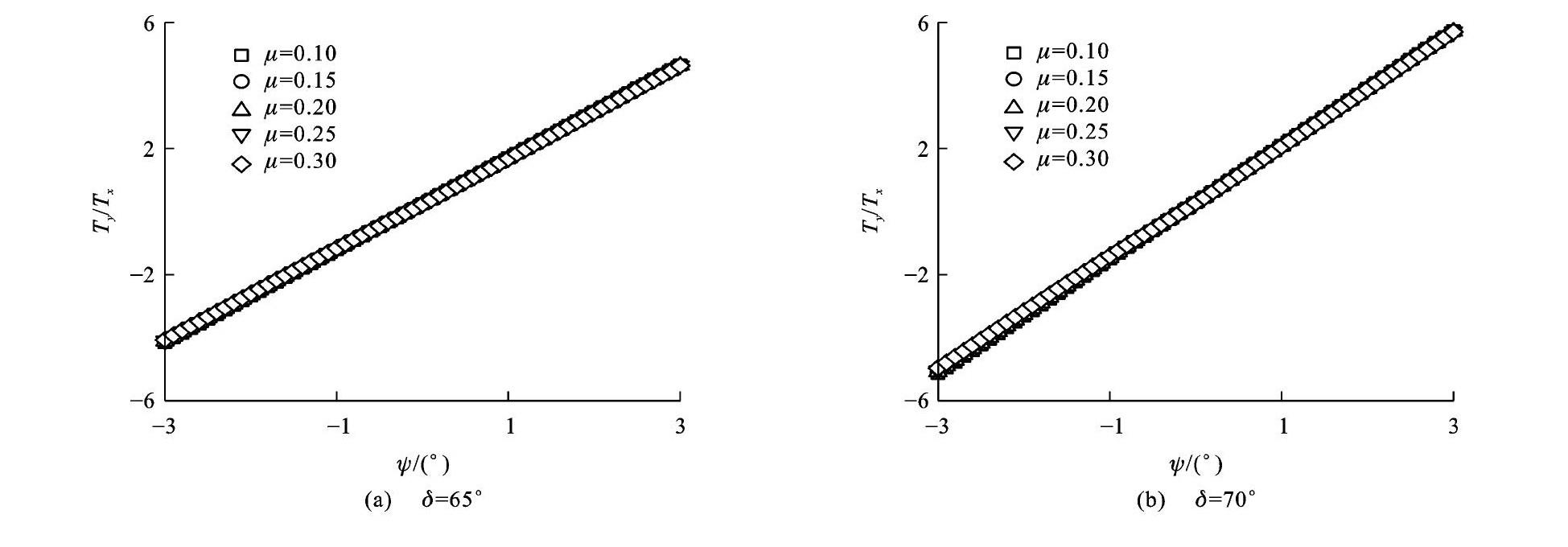
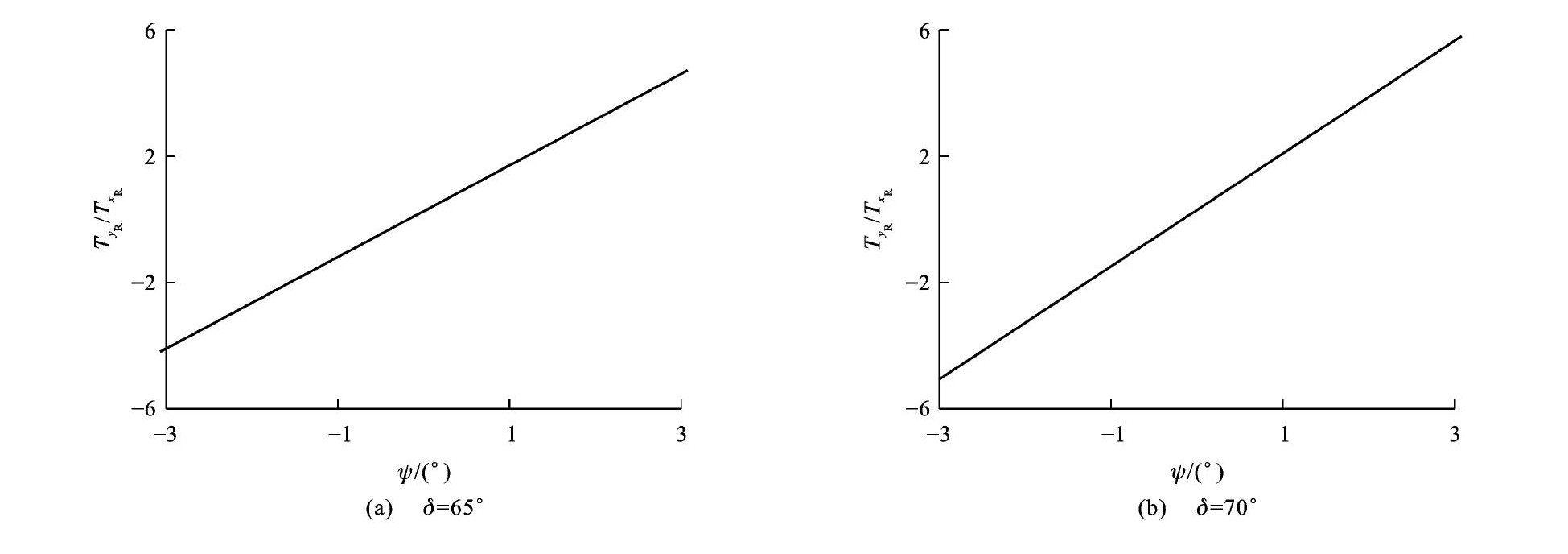
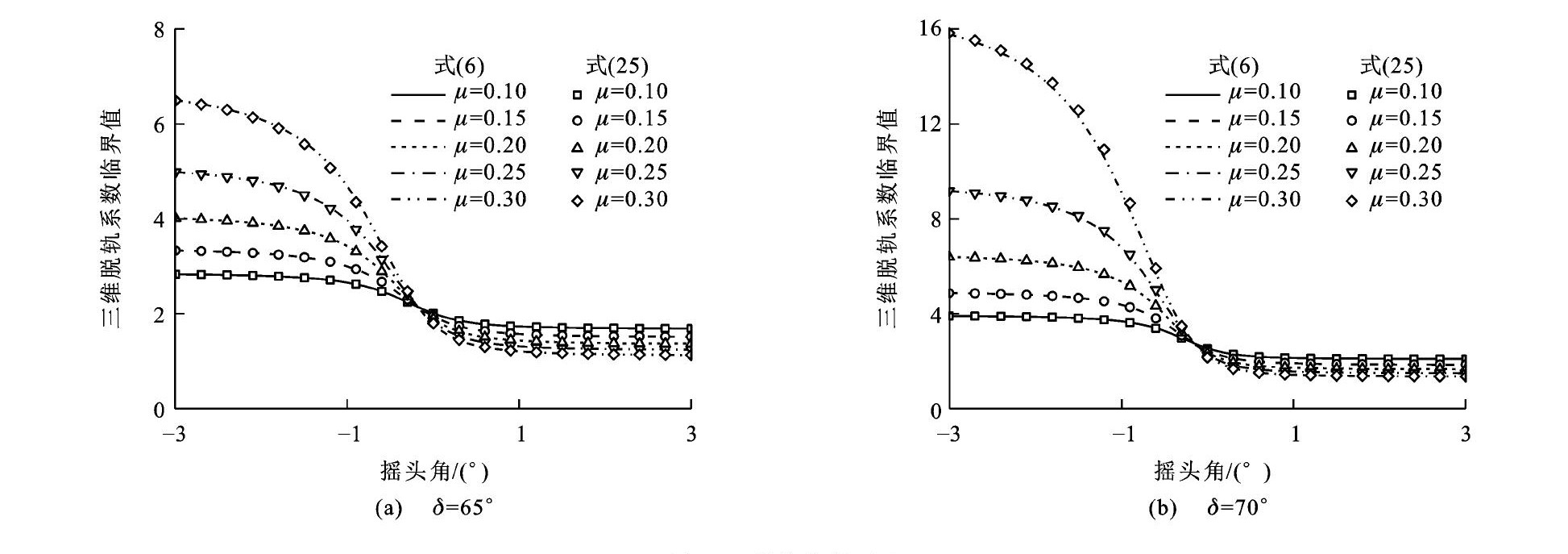
准静态条件下三维脱轨系数临界值简化计算方法
王健
,
马晓川
,
马道林
,
王平
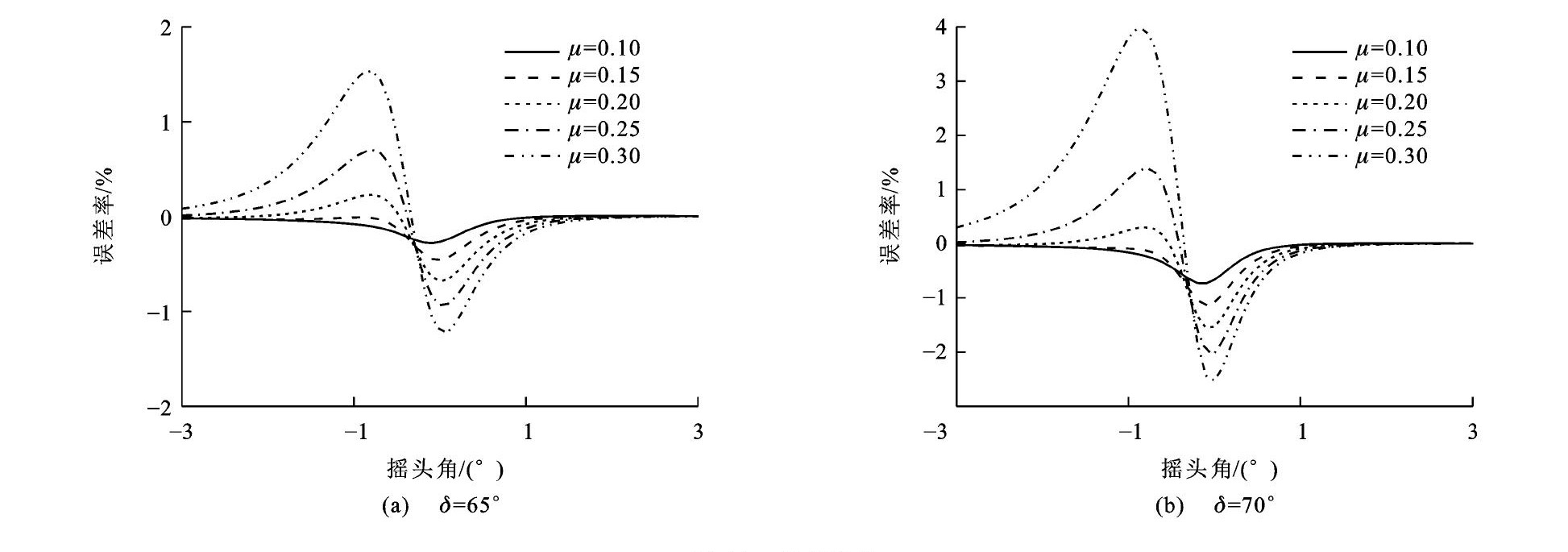
摘要:
根据轮轨系统坐标系间的变换关系, 在准静态条件下建立了轮轨接触斑三维受力分析模型, 推导了考虑轮对摇头角与轮轨蠕滑力的三维脱轨系数计算公式, 得到了脱轨临界状态时三维脱轨系数临界值的计算方法; 以LMA车轮踏面与CHN60钢轨廓形为例, 分析了轮对摇头角与摩擦因数对三维脱轨系数临界值的影响规律, 并与Nadal脱轨系数临界值进行了对比; 为简化三维脱轨系数的计算方法, 根据Shen-Hedrick-Elkins蠕滑模型讨论了不同轮对摇头角、摩擦因数与垂向力条件下Kalker线性合成蠕滑力与3倍库伦摩擦力间的比值关系; 分析了横向蠕滑力与纵向蠕滑力的比值随轮对摇头角与摩擦因数的变化规律, 提出了一种准静态条件的三维脱轨系数简化计算方法, 并与精确公式计算结果进行了对比。分析结果表明: 与三维脱轨系数临界值相比, 当轮对摇头角在1.5°以内时, 纵向蠕滑力在切向力中的占比要明显大于横向蠕滑力, 造成Nadal脱轨系数临界值具有一定的保守性, 但在轮对摇头角较大时, 横向蠕滑力在切向力中的占比达到了90%以上, Nadal与三维脱轨系数临界值计算结果基本相同; 车轮脱轨临界状态下轮轨接触斑内已达到纯滑动状态, 横向蠕滑力和纵向蠕滑力的比值基本不受摩擦因数影响, 并与轮对摇头角存在强线性关系; 与精确公式相比, 三维脱轨系数简化计算方法的误差在±5%以内, 可以满足工程应用的要求。
更多>
2017, 17(5): 71-80.
摘要
(
388
)
HTML
(
84
)
PDF (927KB)
(
758
)
引用
(
)
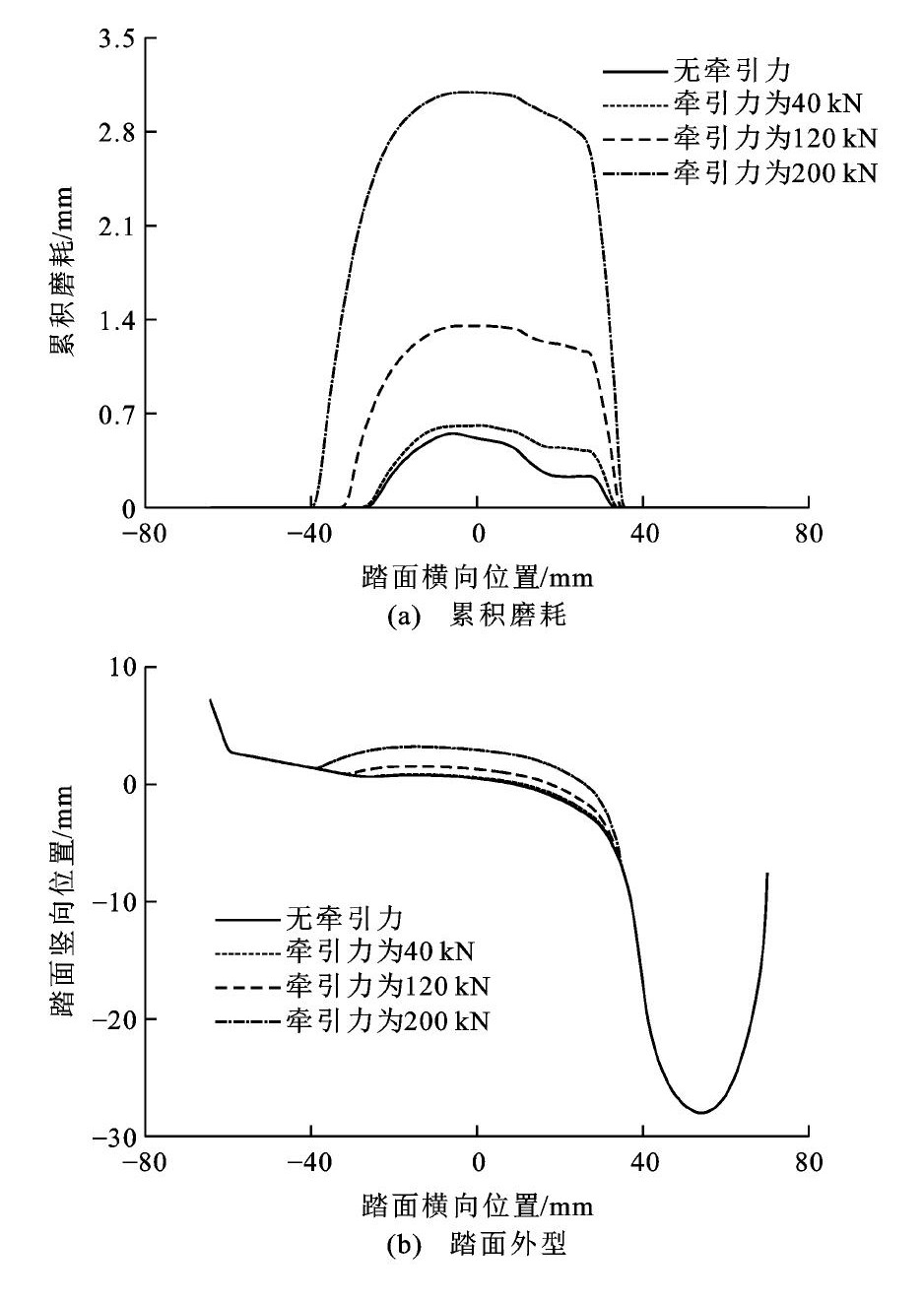
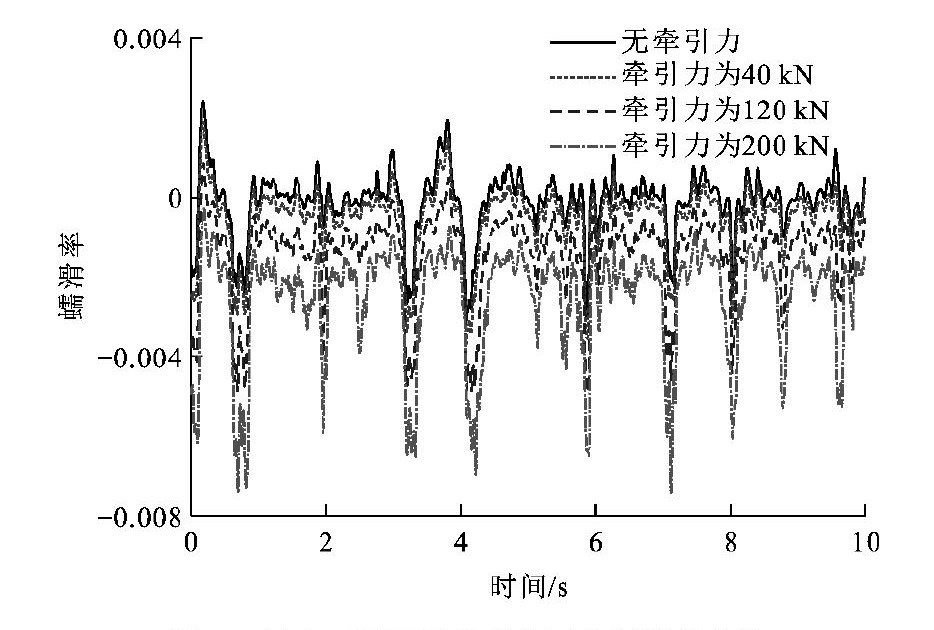
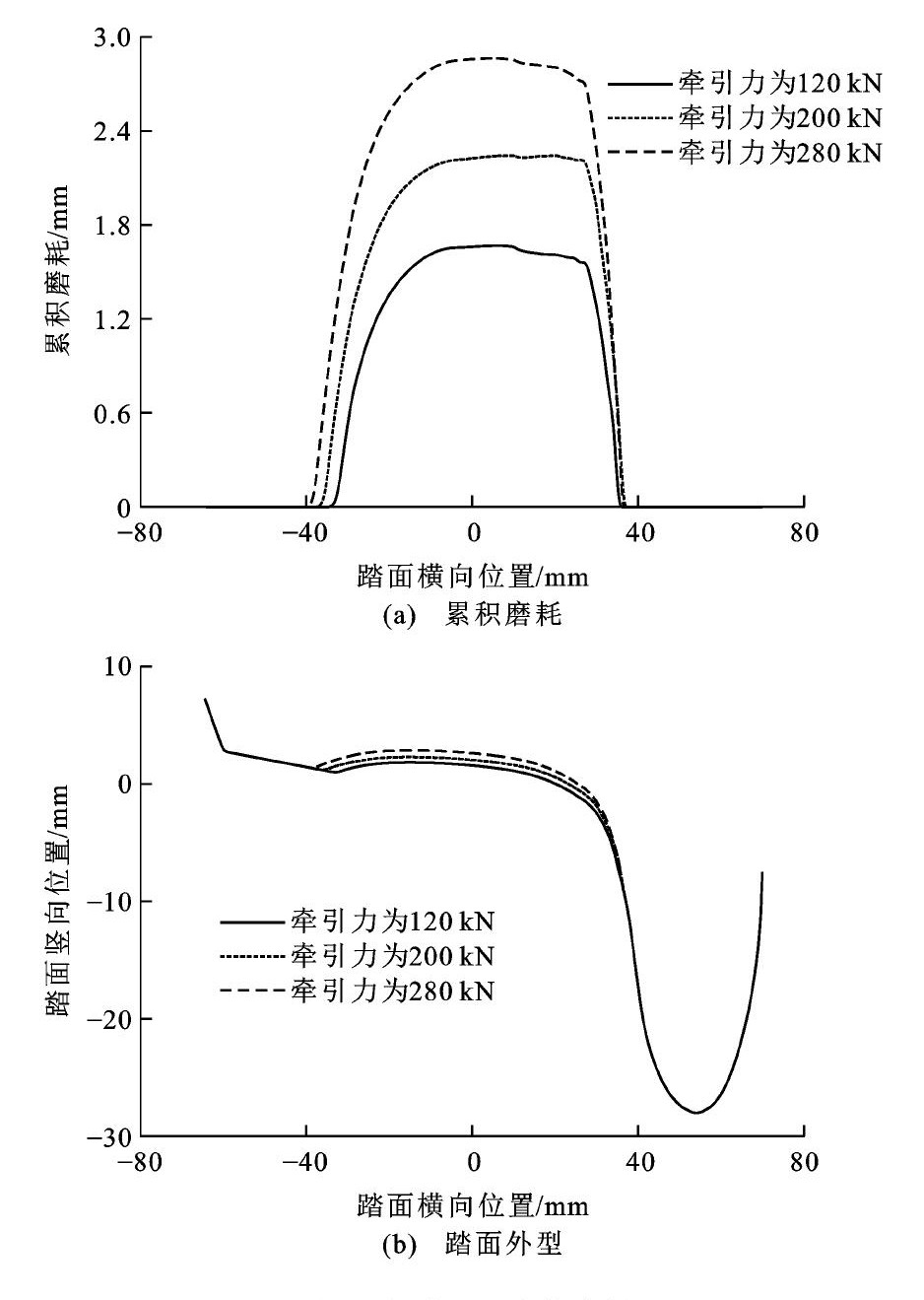
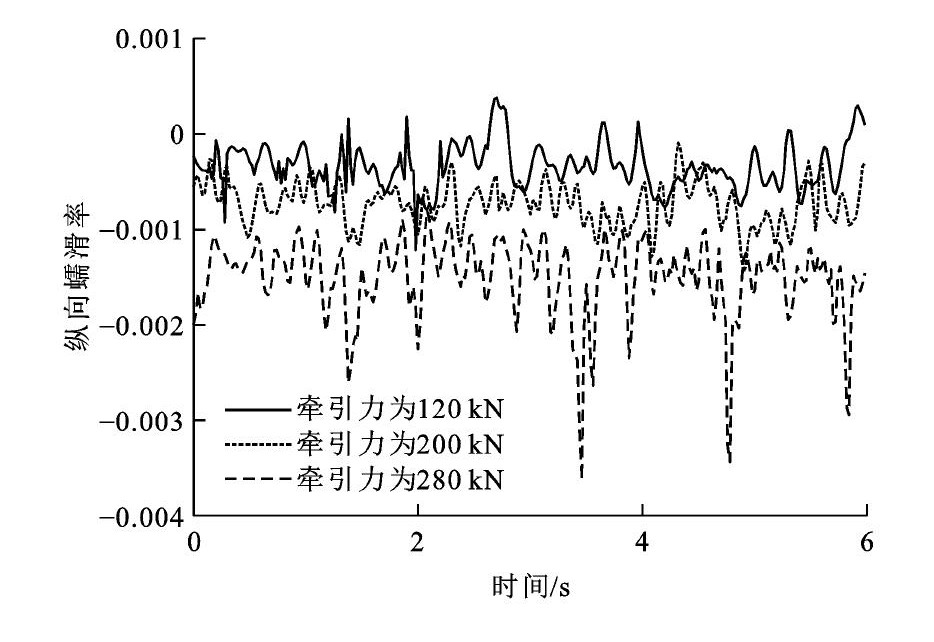
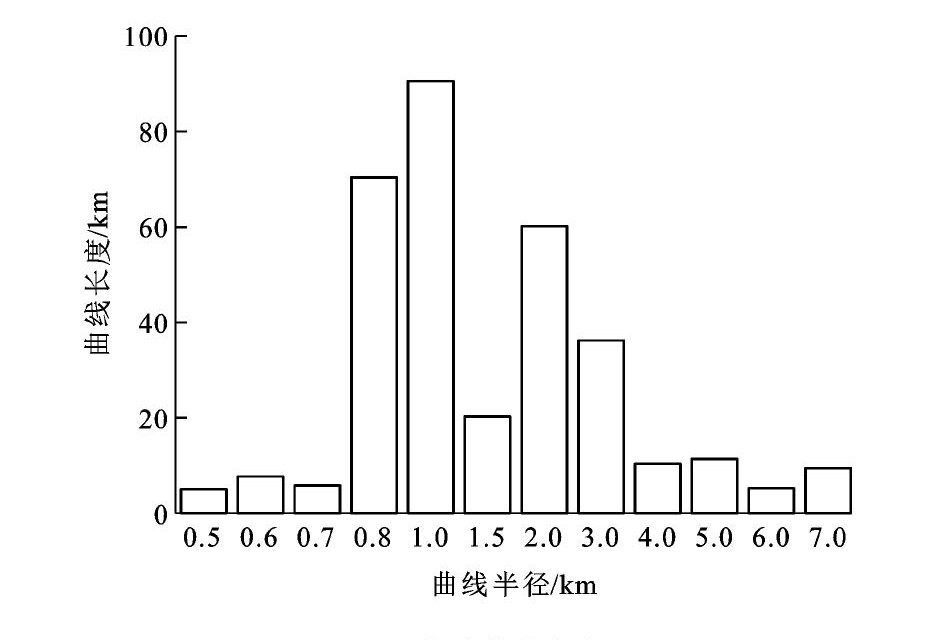
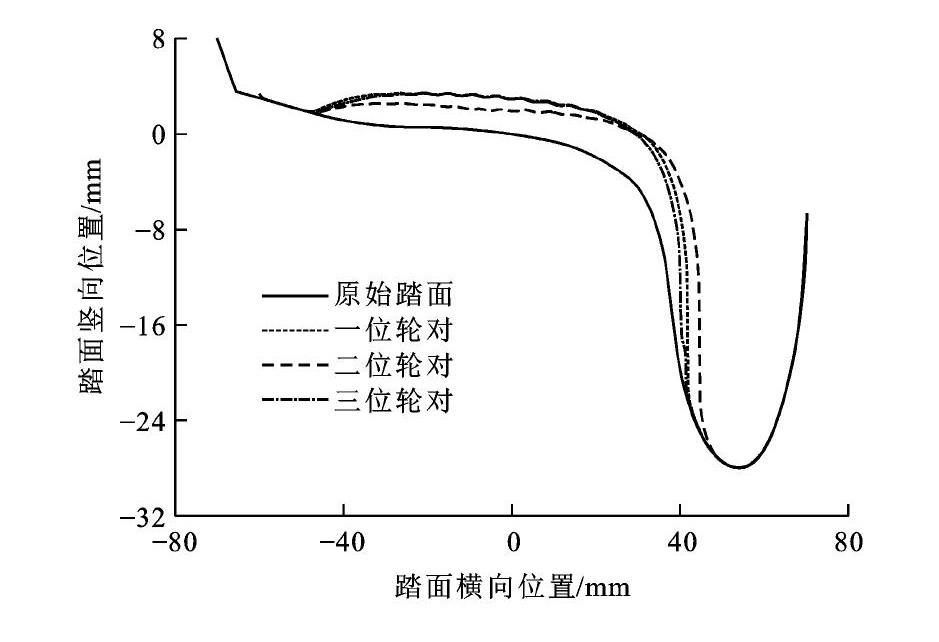
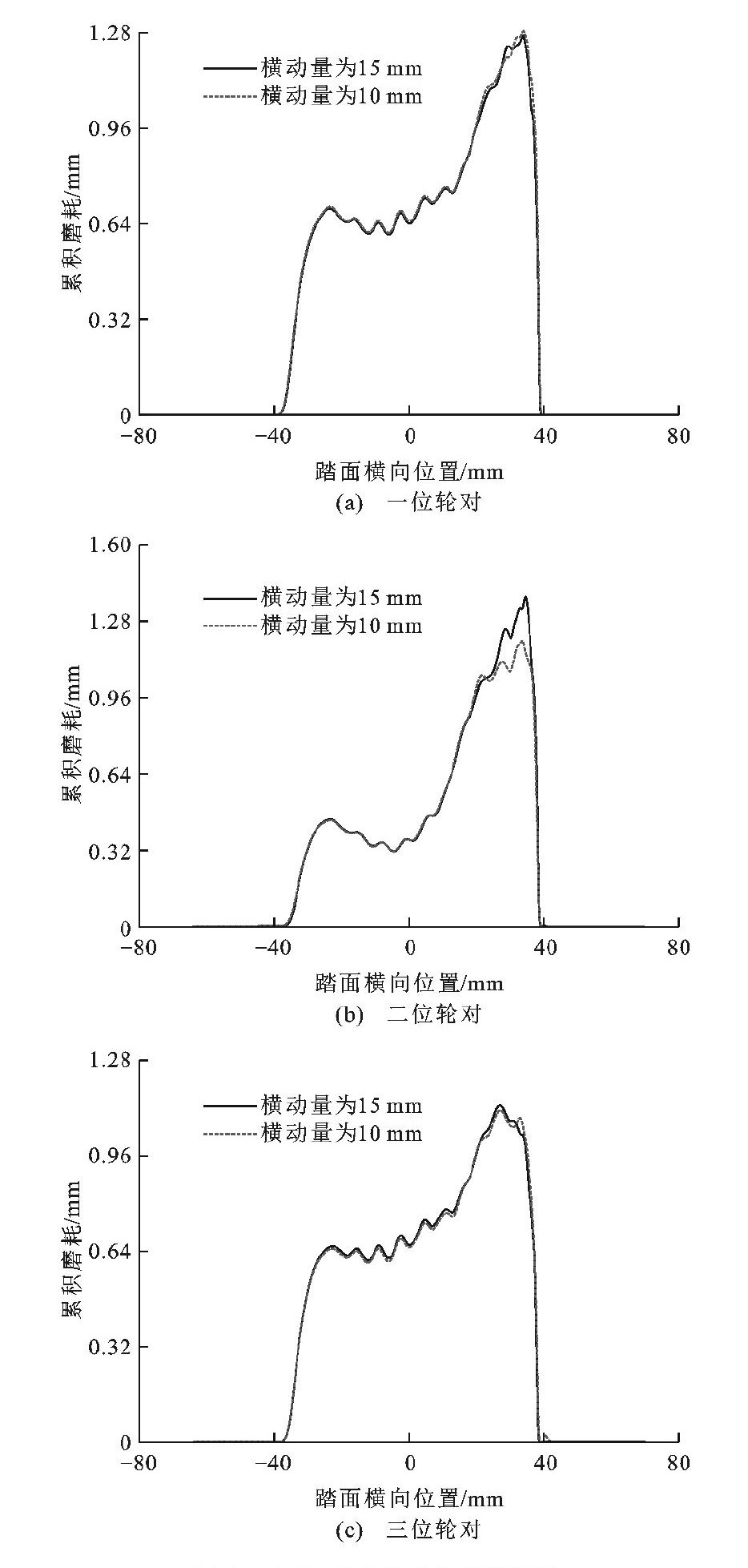
机车牵引工况下车轮磨耗研究
杨阳
,
丁军君
,
李芾
,
李东宇
,
李金城
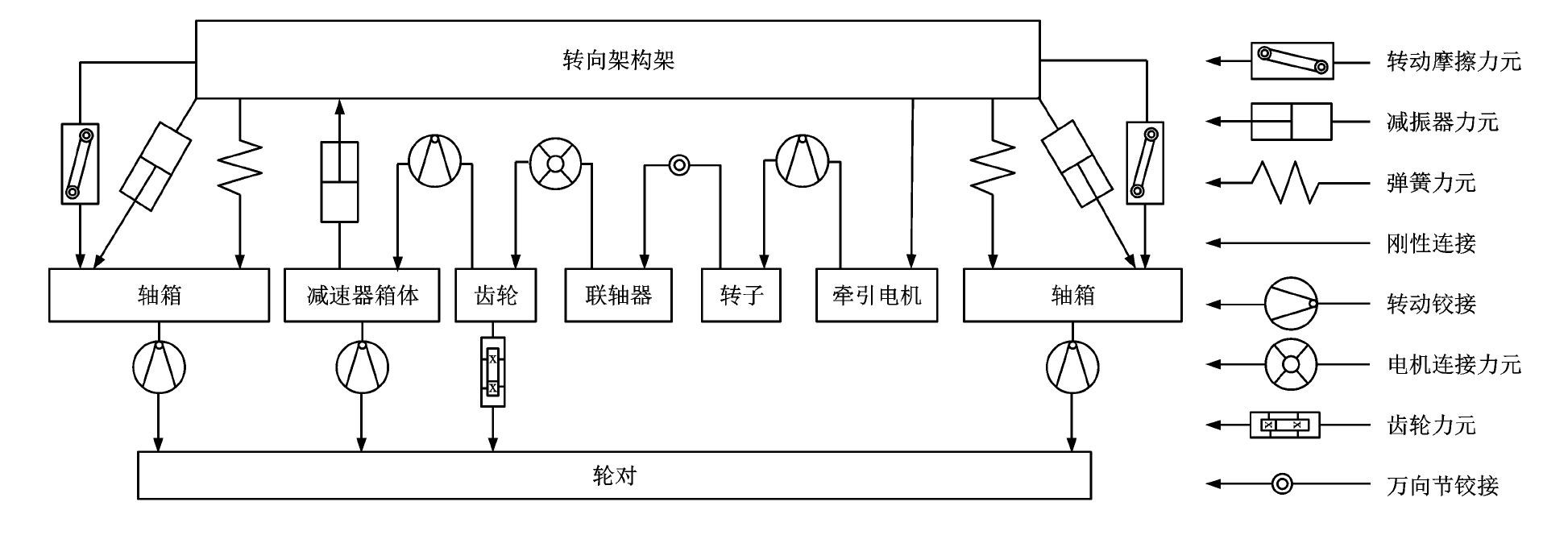
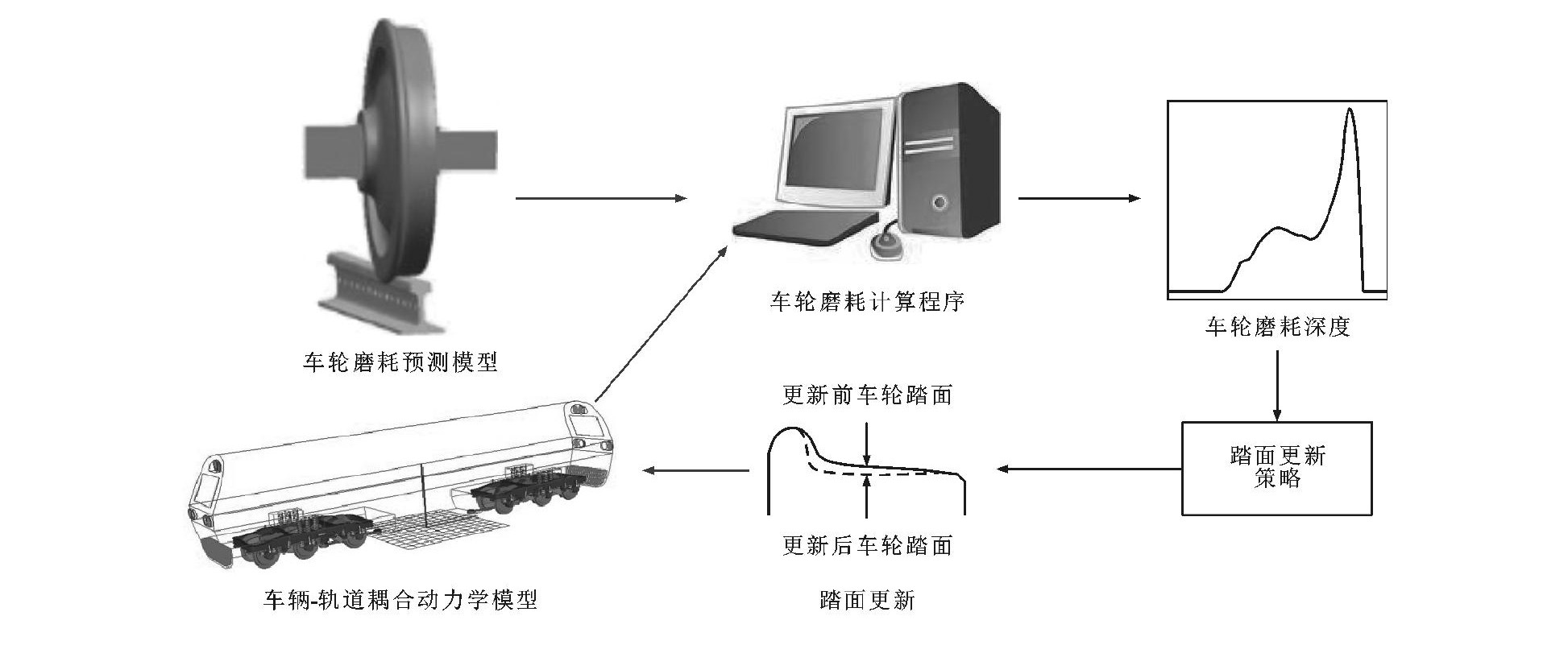
摘要:
以某正在运行的C0-C0轴式电力机车为研究对象, 考虑了机车传动系统的影响, 基于Archard磨耗模型, 建立了电力机车的车轮磨耗计算模型, 研究了恒速与起动工况下车轮的磨耗, 根据某实际线路计算车轮磨耗, 并与实测数据进行对比, 研究了机车正常运行过程中出现的轮缘非正常磨耗。分析结果表明: 当车辆恒速运行2.6×10
5
km, 牵引力由40kN增大到120kN和由120kN增大到200kN时, 磨耗分别增加了0.74、1.74mm, 因此, 随着牵引力增大磨耗急剧增加; 机车起动过程中增加牵引力可以获得更大的加速度, 随着牵引力增大, 蠕滑率明显增大, 因此, 增加牵引力可节约运行时间, 但同时会产生更大磨耗; 通过与车轮磨耗实测数据对比, 车轮磨耗计算模型较为准确, 在踏面处仿真计算结果与实测结果具有很好的一致性; 由于车轮磨耗计算模型未考虑材料的塑性流动与道岔的影响, 在轮缘处的仿真结果与实测结果有一定的差异; 降低二位轮对横动量和轨侧润滑能够大幅降低车轮磨耗, 当二位轮对横动量由15mm降低为10mm时, 二位轮对累积磨耗降低了15.4%;轨侧润滑后一~三位轮对最大累积磨耗分别降低了13.40%、21.32%、6.46%。
更多>
2017, 17(5): 81-89.
摘要
(
607
)
HTML
(
125
)
PDF (1593KB)
(
367
)
引用
(
)
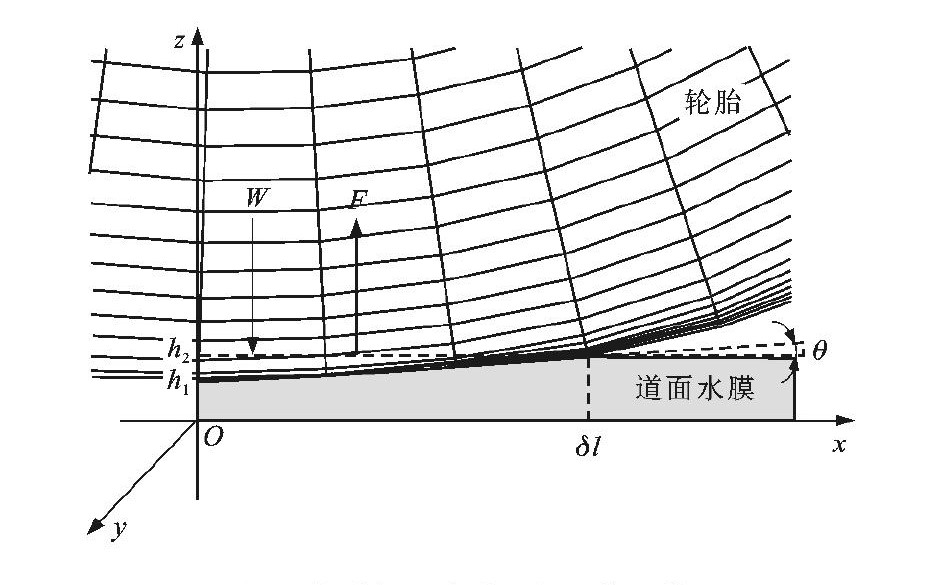
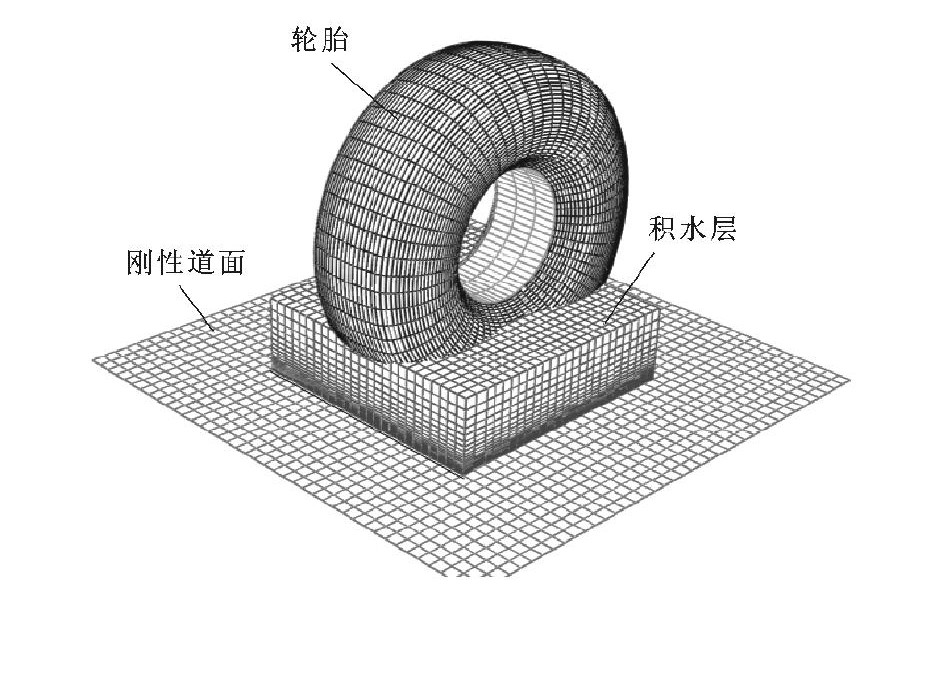
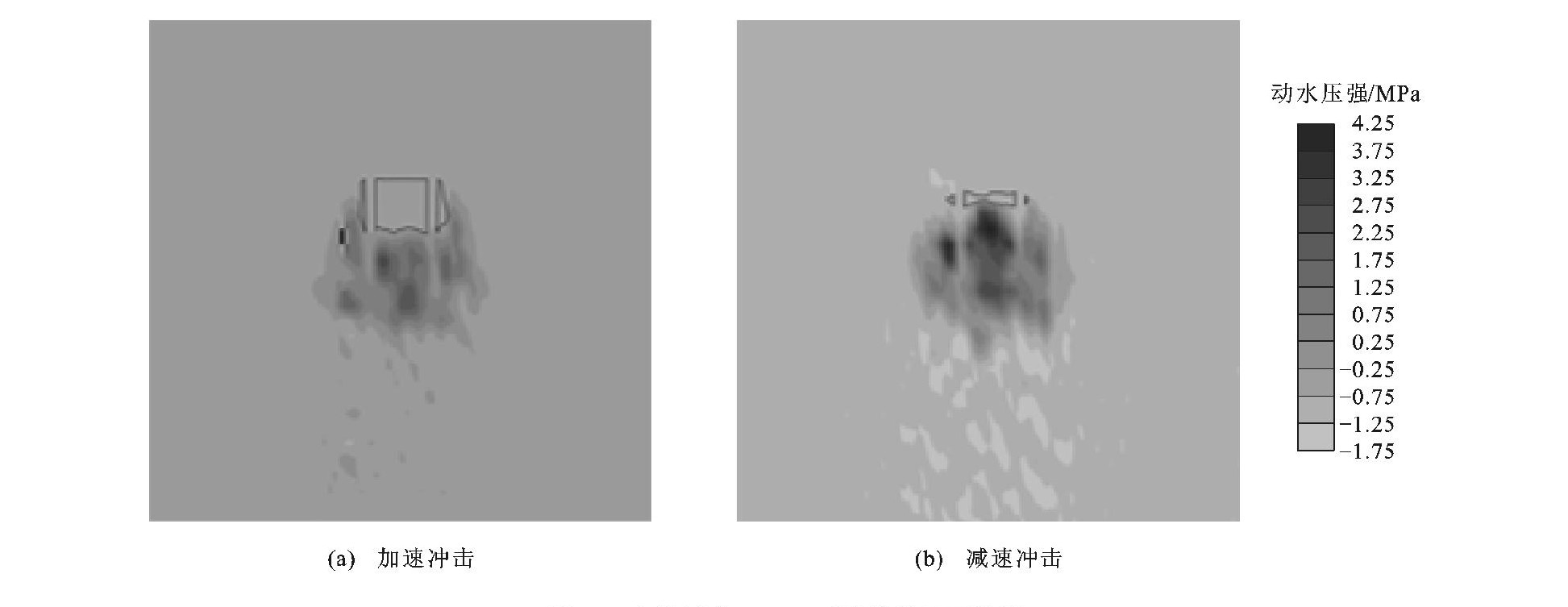
湿滑道面飞机轮胎临界滑水速度数值仿真
李岳
,
蔡靖
,
宗一鸣
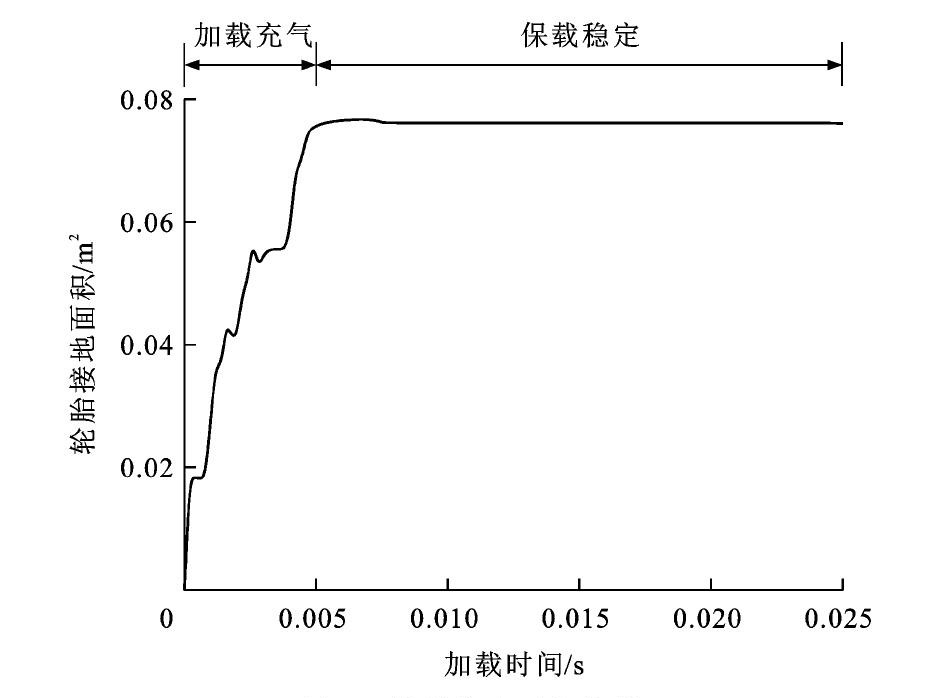
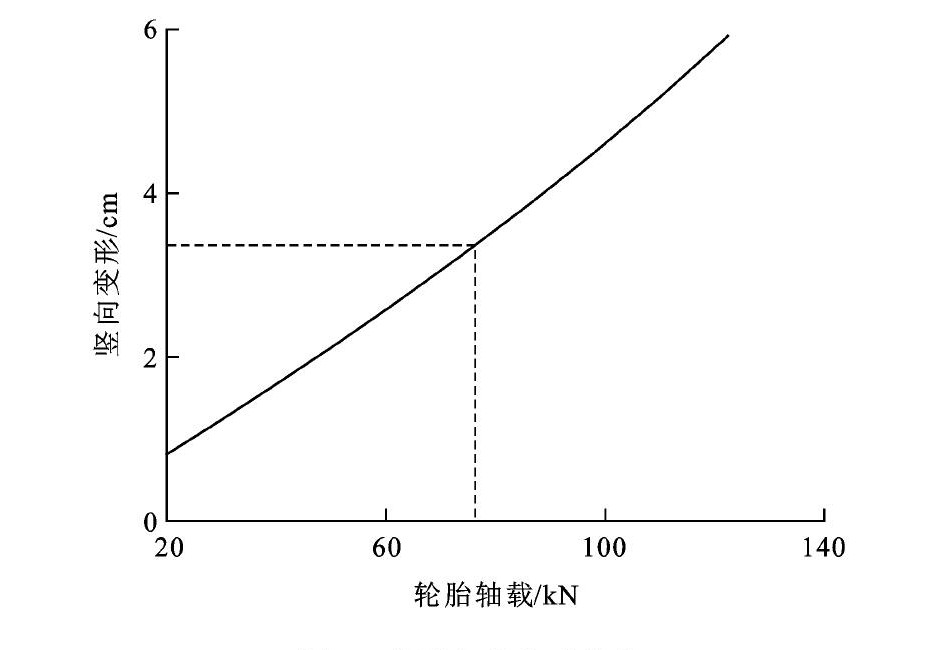
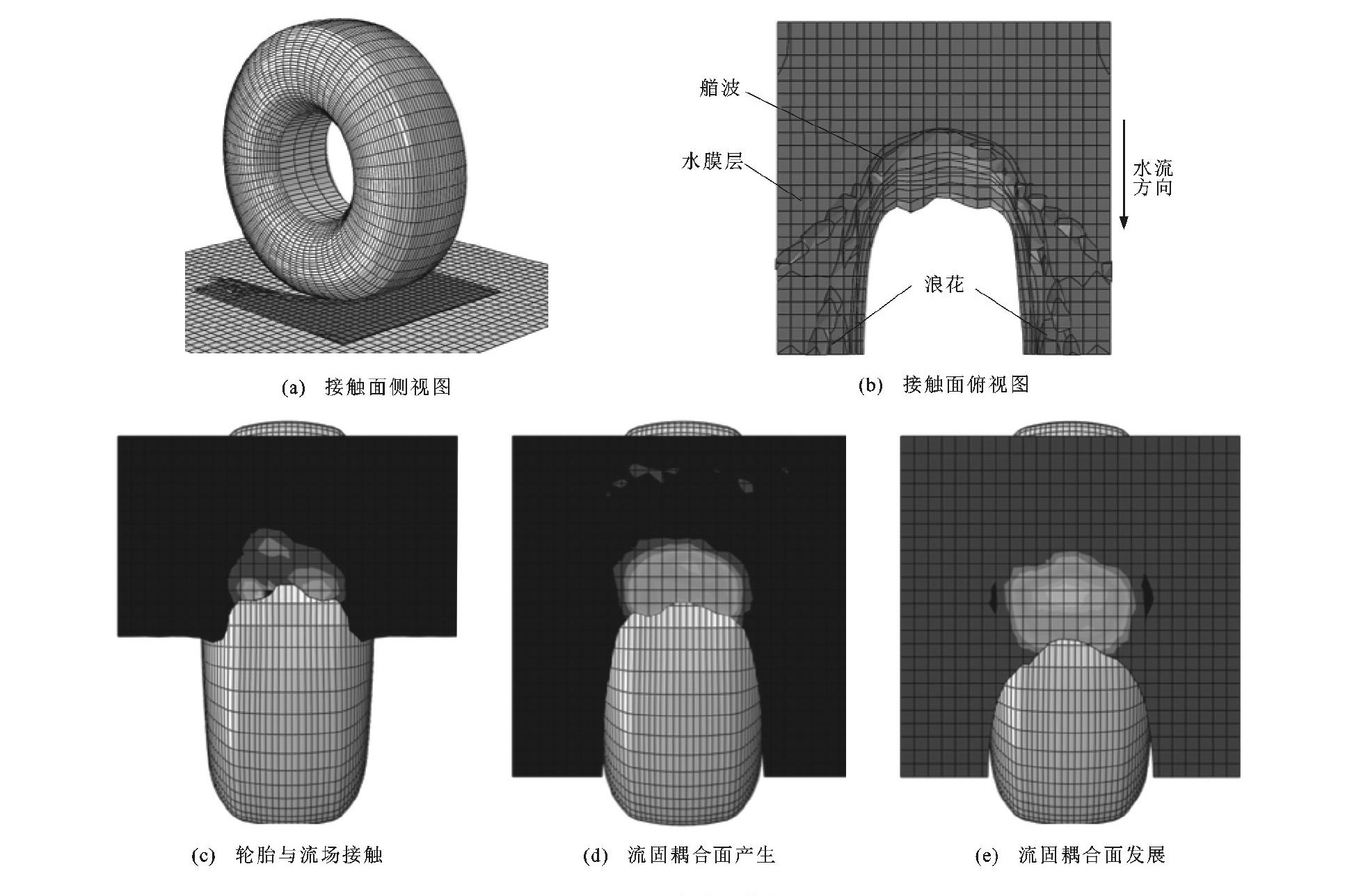
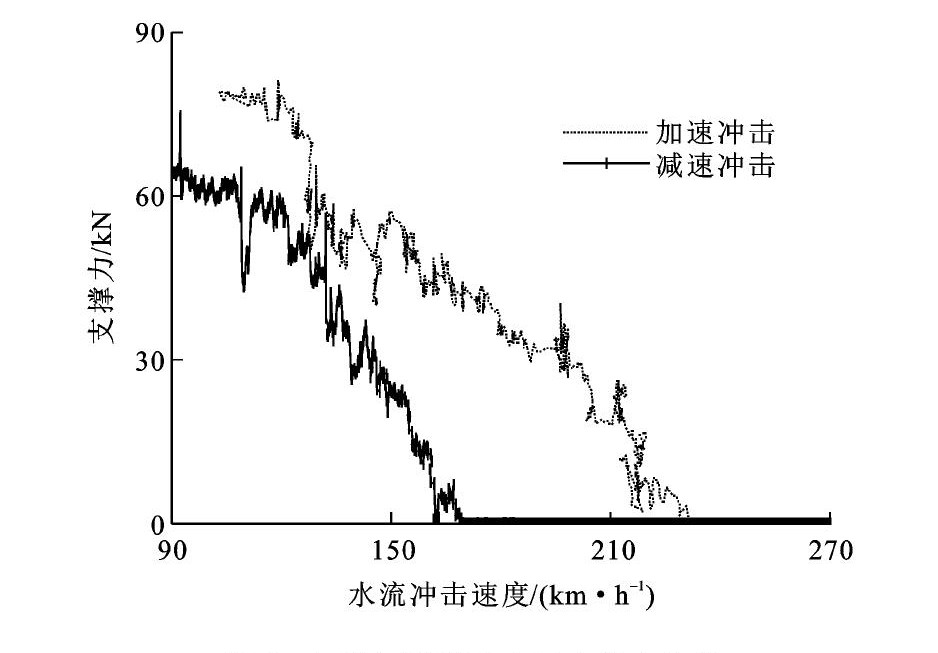
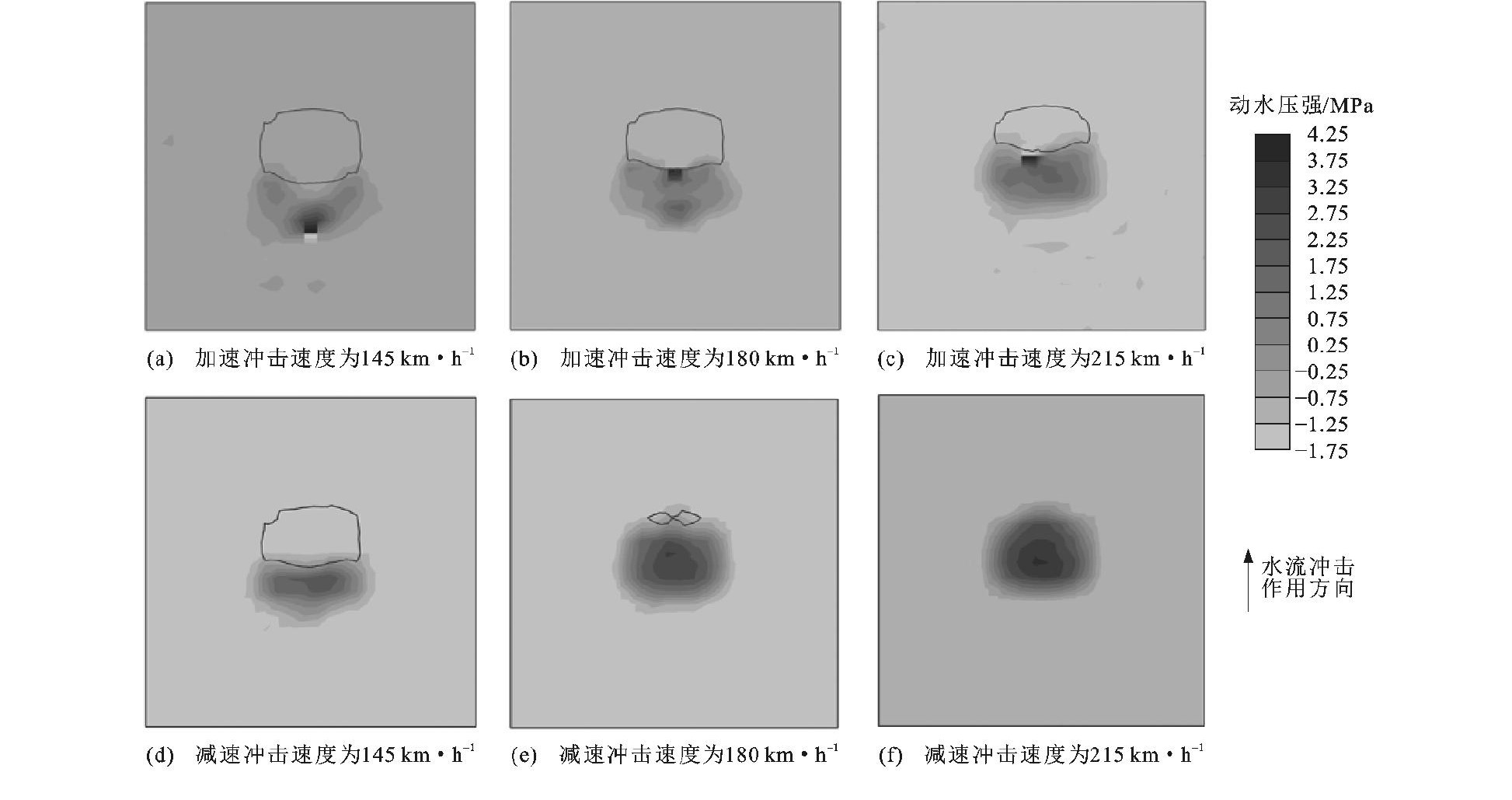
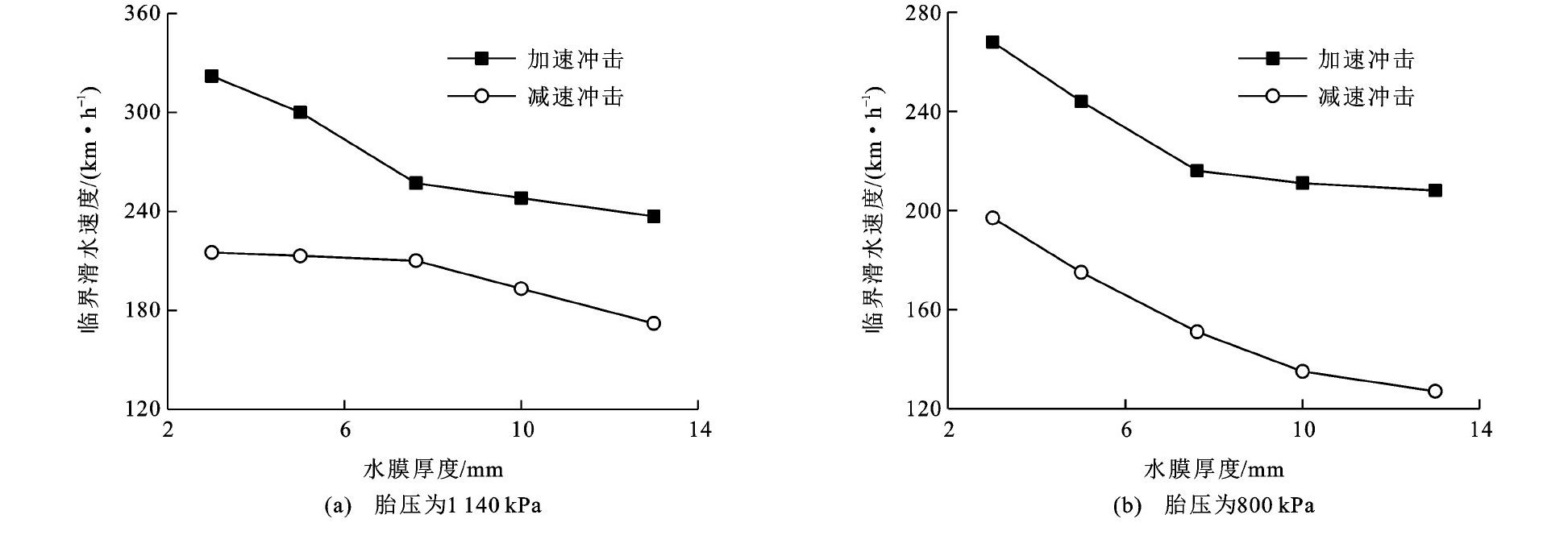
摘要:
采用ABAQUS建立了基于CEL算法的飞机轮胎与积水道面流固耦合分析模型, 推导了轮胎接触面动水压强与道面竖向支撑力表达式, 对比了飞机起飞与着陆过程中的滑行状态, 提出了临界滑水速度的上下限解概念, 校核了轮胎模型静态变形与动态滑水特征, 研究了胎压、胎纹与水膜厚度的影响规律, 分析了轮胎接地面积与动水压强分布。仿真结果表明: 在76.6kN轴载作用下, 轮胎模型接地面积为0.076m2, 轮胎中心竖向变形约为3.27cm, 轮胎临界滑水速度为128.5~222.4km·h
-1
, 与NASA轮胎滑水试验数据一致, 验证了仿真模型的合理性和适用性; 在胎压为1 140kPa时, 减速冲击条件下飞机轮胎临界滑水速度为163km·h
-1
, 小于加速冲击时的上限226km·h
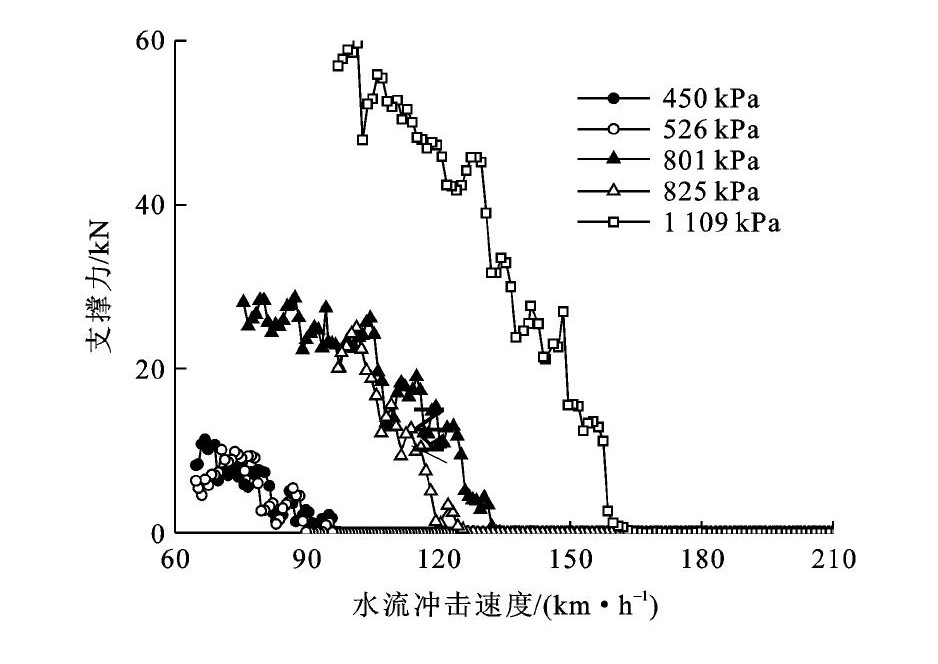
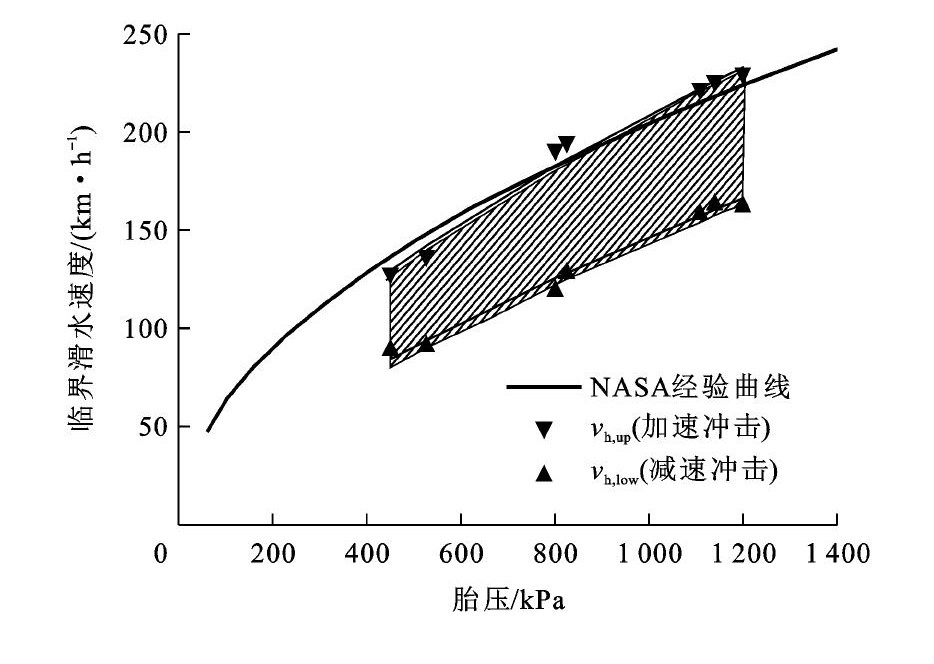
-1
, 轮胎接地面积明显减小, 道面支撑力低于机轮轴载的10%;在450~1 109kPa胎压范围内, 减速冲击时临界滑水速度下限较NASA经验公式计算结果更为保守, 两者相差30
7
0km·h
-1
; 轮胎纵向沟槽排水可降低轮胎前缘动水压强峰值, 增大轮胎接地面积, 减速冲击时带纹轮胎临界滑水速度较光滑轮胎提高了26.9%~28.8%, 增幅约为加速冲击时的2倍; 当道面水膜厚度由3mm增加至13mm时, 胎压为1 140kPa的飞机轮胎临界滑水速度上下限分别降低了85km·h
-1
和43km·h
-1
; 在低胎压、厚水膜与减速冲击条件下, 临界滑水速度下限仅为127km·h
-1
, 低于常见飞机进近接地速度205~250km·h
-1
, 因此, 滑水事故风险增加。
更多>
2017, 17(5): 90-101.
摘要
(
566
)
HTML
(
138
)
PDF (2653KB)
(
597
)
引用
(
)
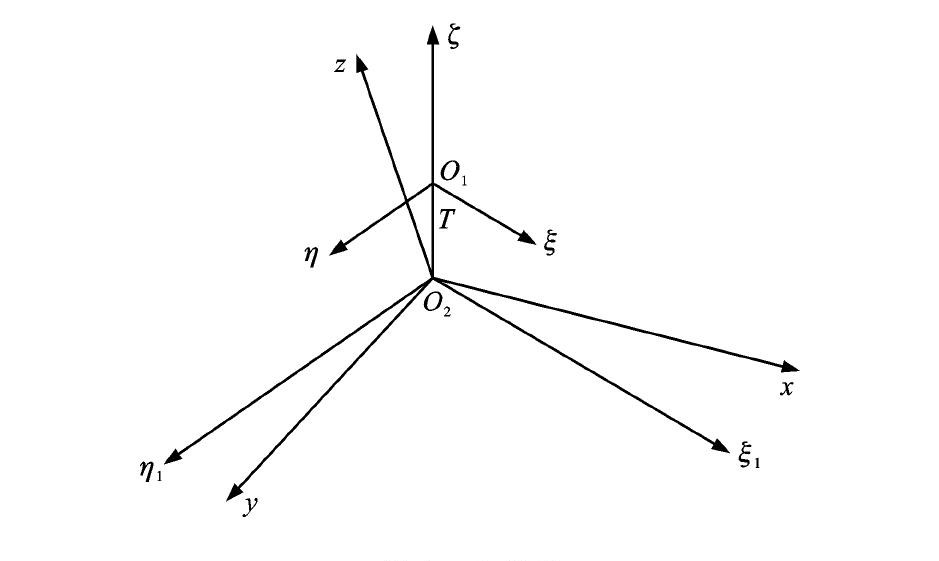
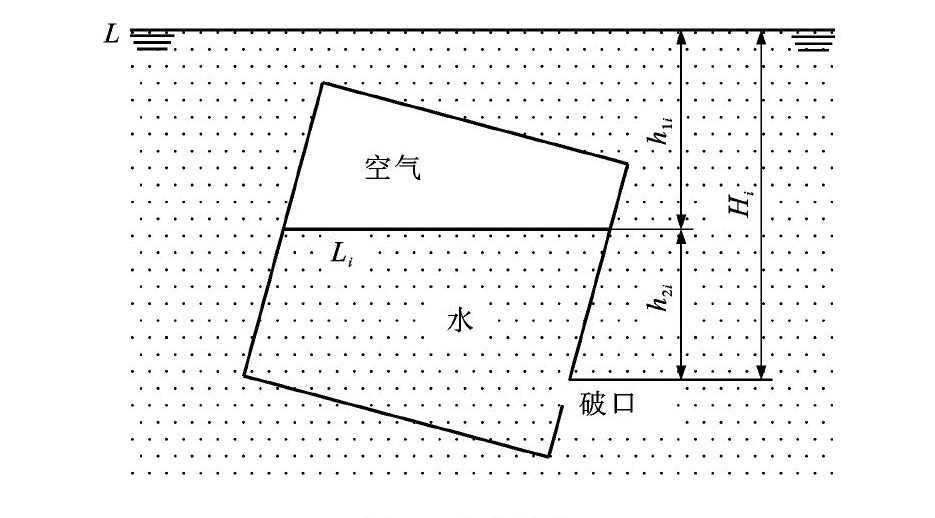
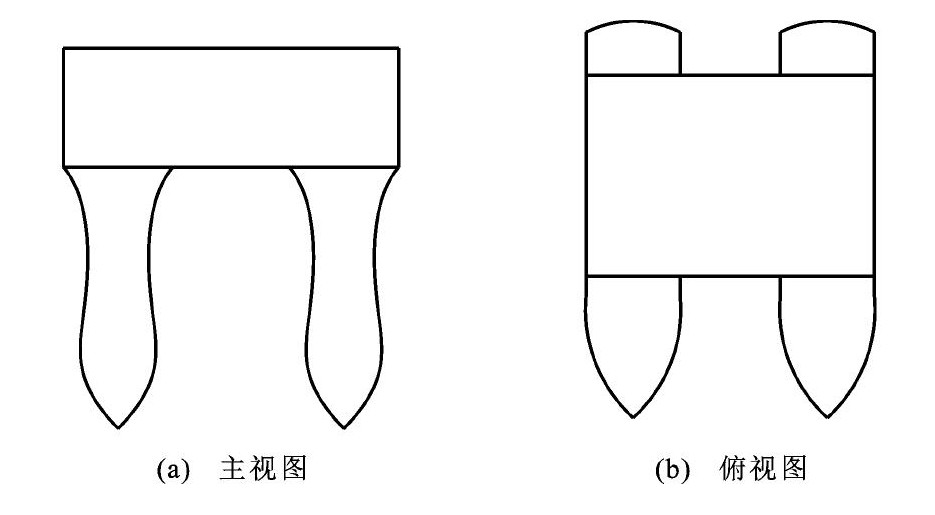
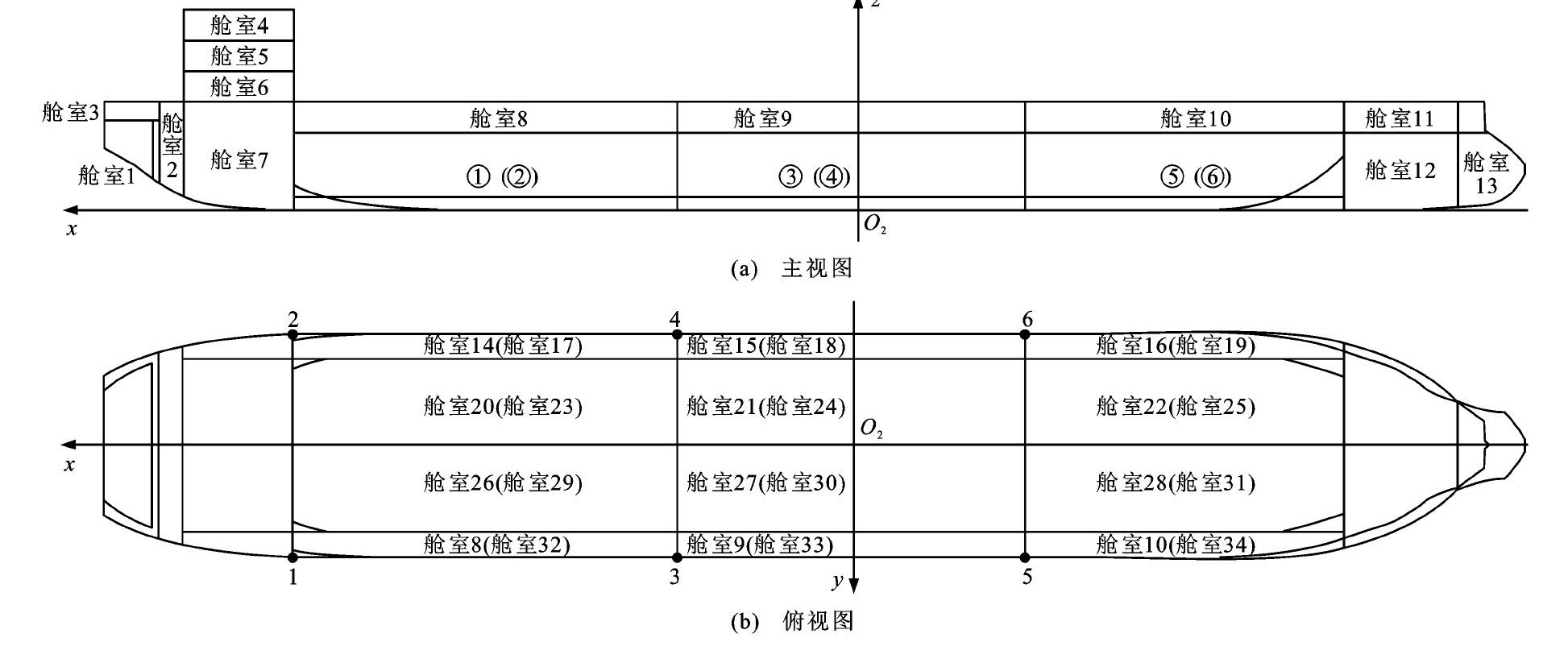
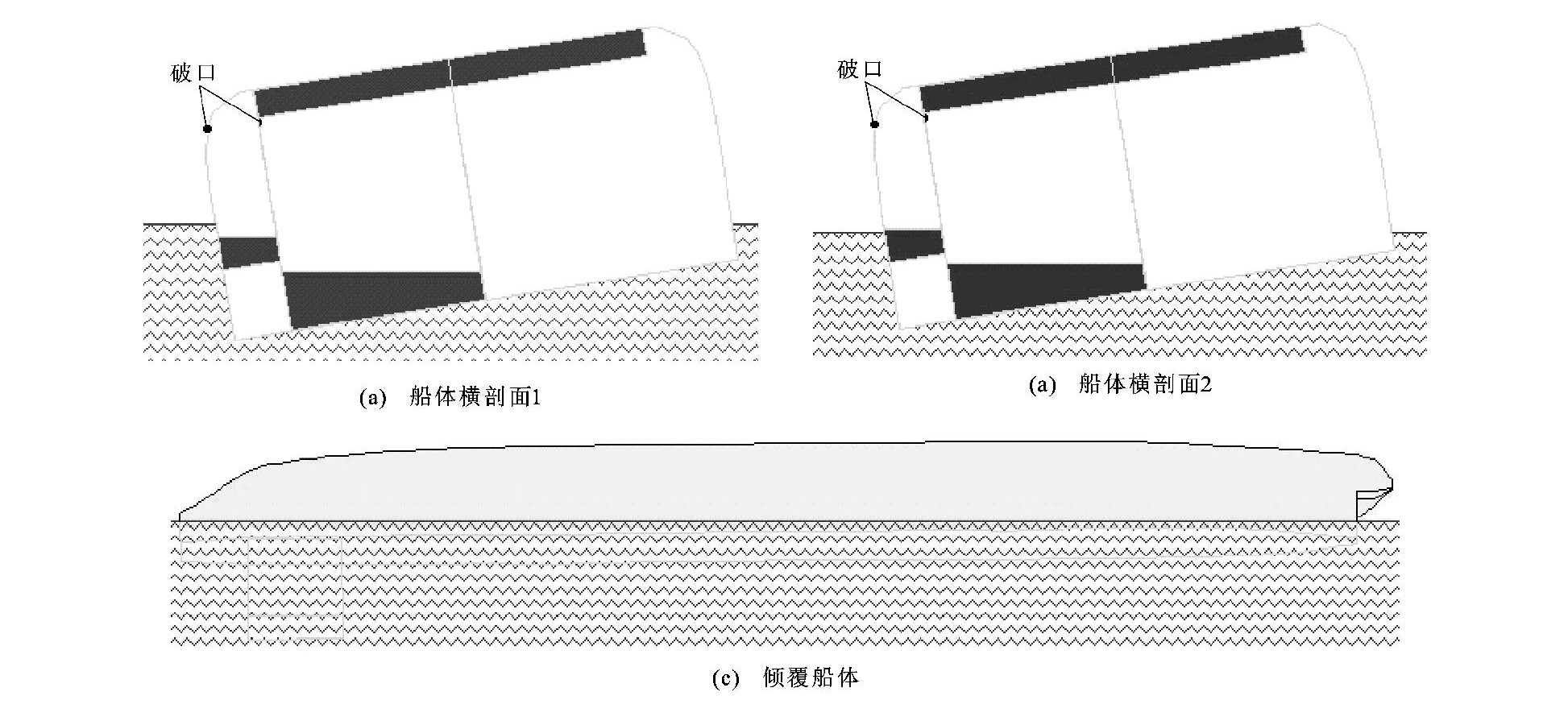
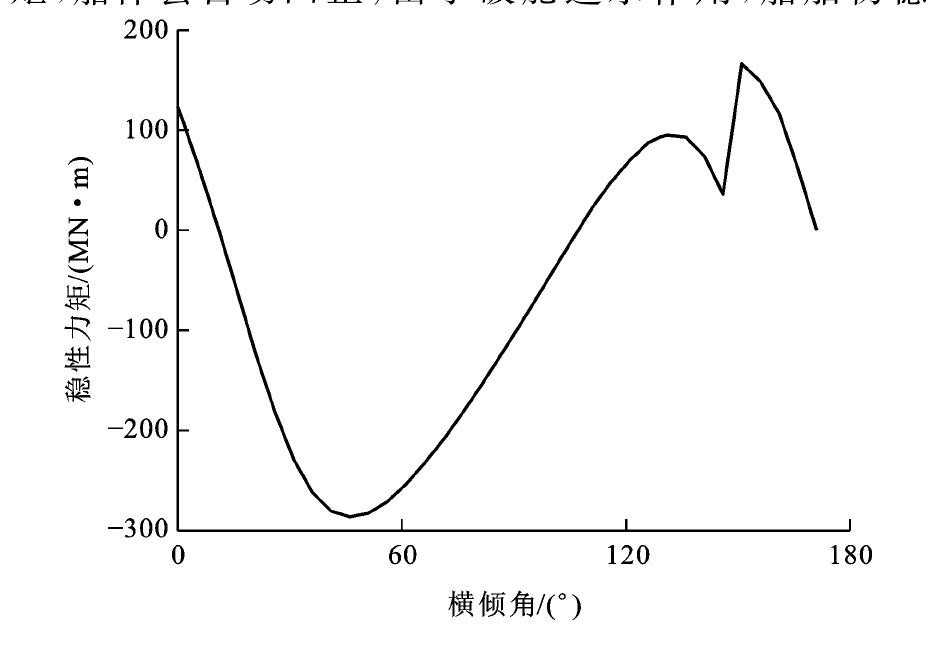
破舱倾覆船体扳正过程数值模拟
潘德位
,
林成新
,
周兆欣
,
孙玉强
,
刘志杰
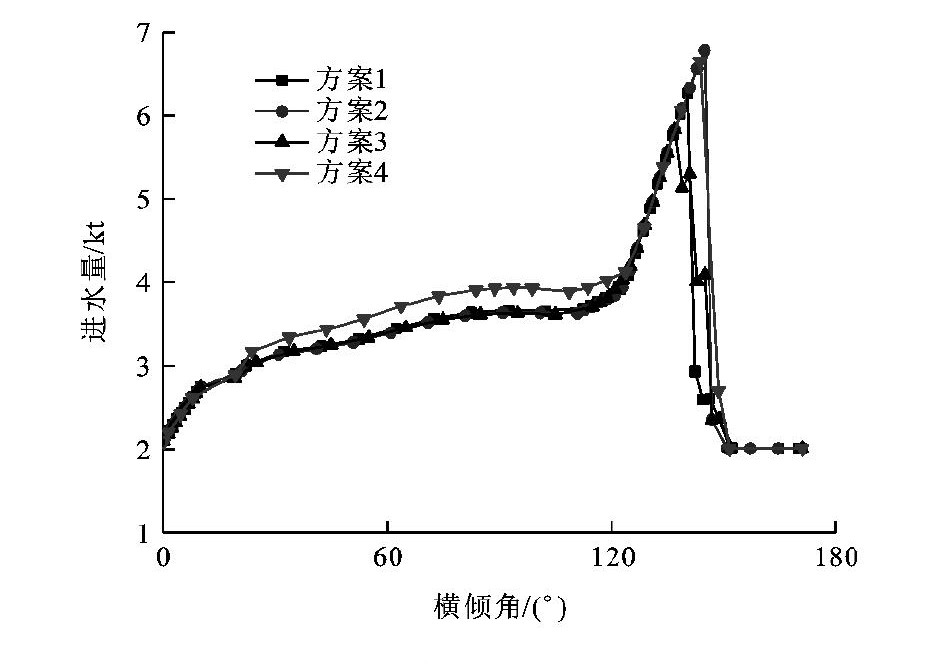
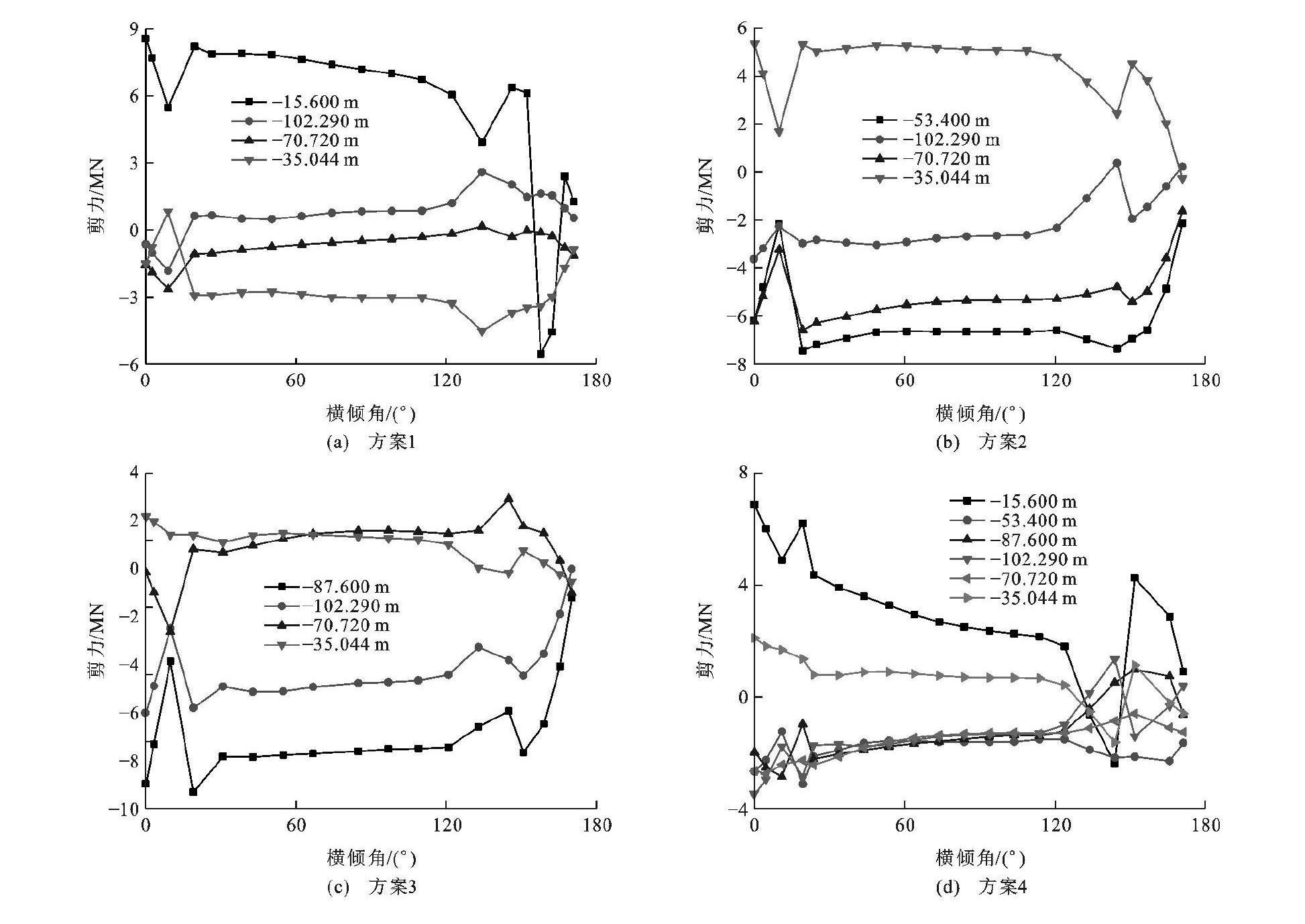
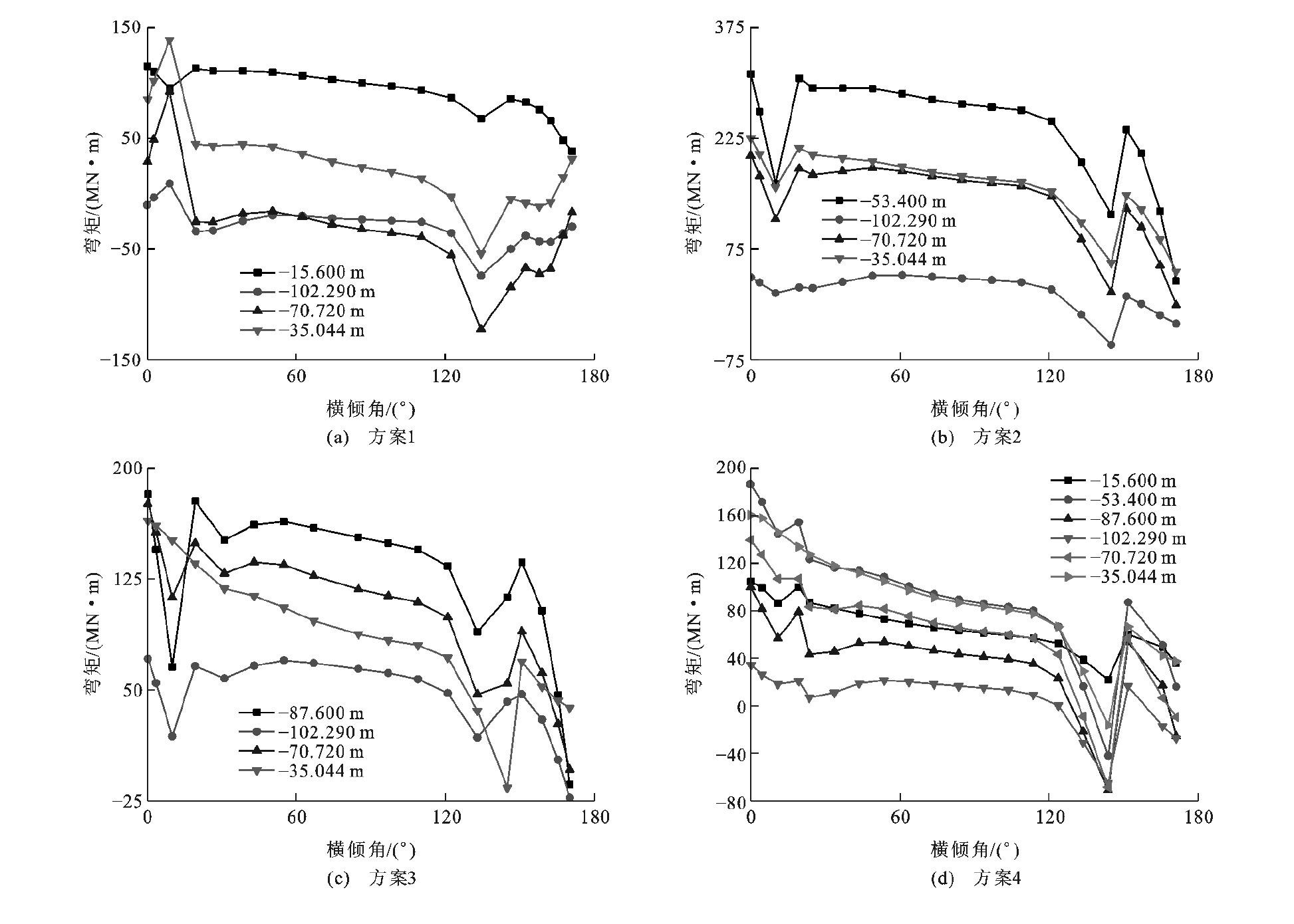
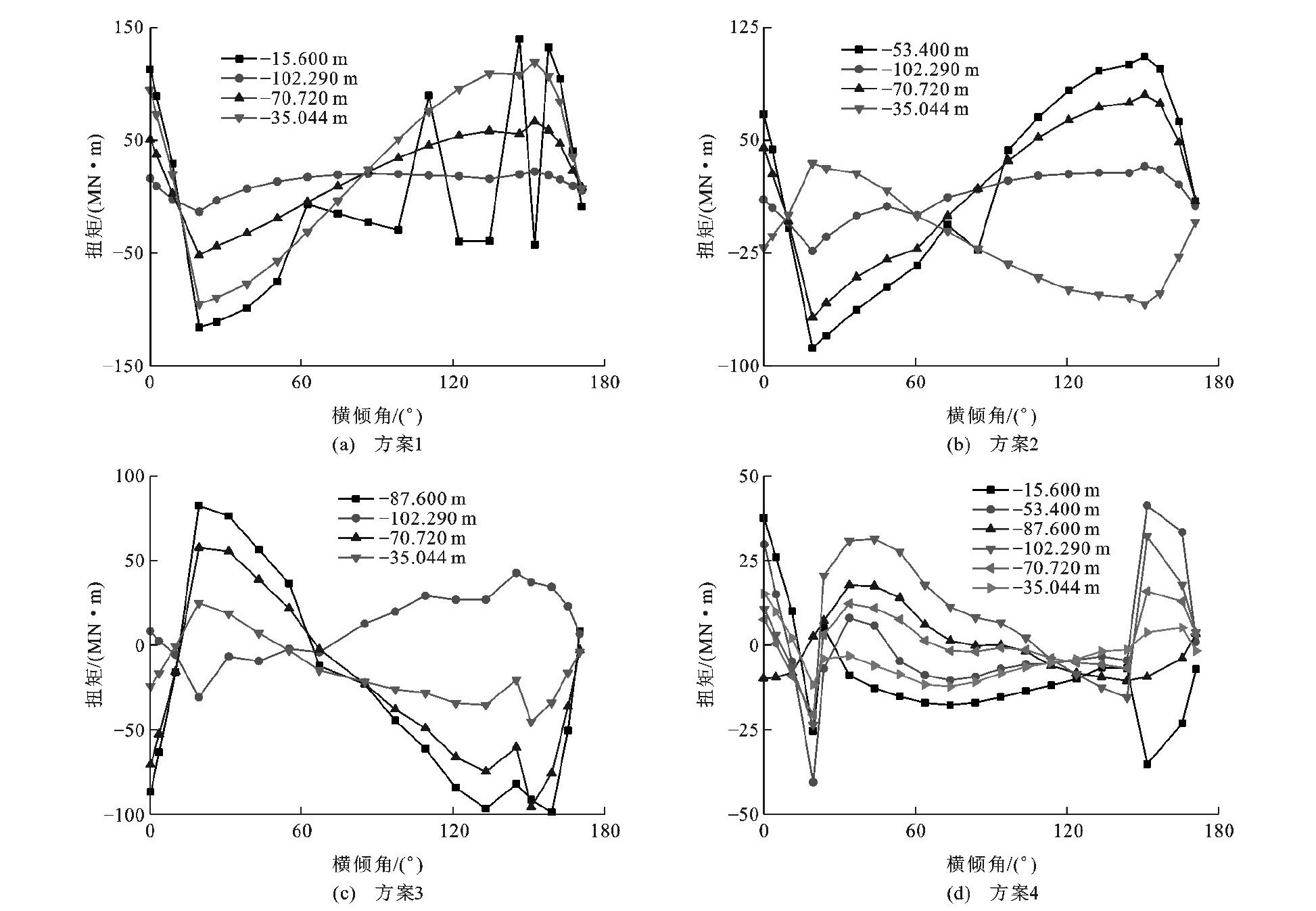
摘要:
考虑了破舱倾覆船体浮性和稳性, 研究了船体在扳正过程中空间位置和受力状态; 采用欧拉旋转变换方法建立了船体空间力学平衡方程, 根据船舶静力学原理, 得到了破舱倾覆船体稳性和扳正力数学模型; 根据伯努利定理计算了破舱进水量及其对船体重心和浮心位置的影响; 利用GHS软件模拟了破舱倾覆船体的扳正过程, 求解了其最大扳正力和进水量, 计算了船体纵向6个位置的剪力、弯矩和扭矩。计算结果表明: 在最初扳正时, 破舱进水导致倾覆船体扳正力矩降低了130.312 MN·m, 说明破舱进水降低了倾覆船体的稳性, 可以减小最初扳正力, 降低了扳正难度; 在扳正后期时, 破舱进水产生的倾斜力矩最大值为163.594 MN·m, 说明破舱进水降低了船体的稳性, 提高了扳正难度, 仍需要施加较大的扳正力平衡船体; 船体纵向强度分布会随着扳正力和破舱进水量的变化而改变, 多点扳正船体的最大扳正力小于单点最大扳正力的40%, 最大扭矩小于单点扭矩的50%;方案1~4的最大进水量分别为6 269.76、6 781.01、5 830.76、6 653.33t, 因此, 合理布置扳正点的位置, 单点扳正(方案1~3) 的进水量小于多点扳正(方案4)。
更多>
2017, 17(5): 102-112.
摘要
(
555
)
HTML
(
93
)
PDF (2803KB)
(
390
)
引用
(
)
交通运输规划与管理
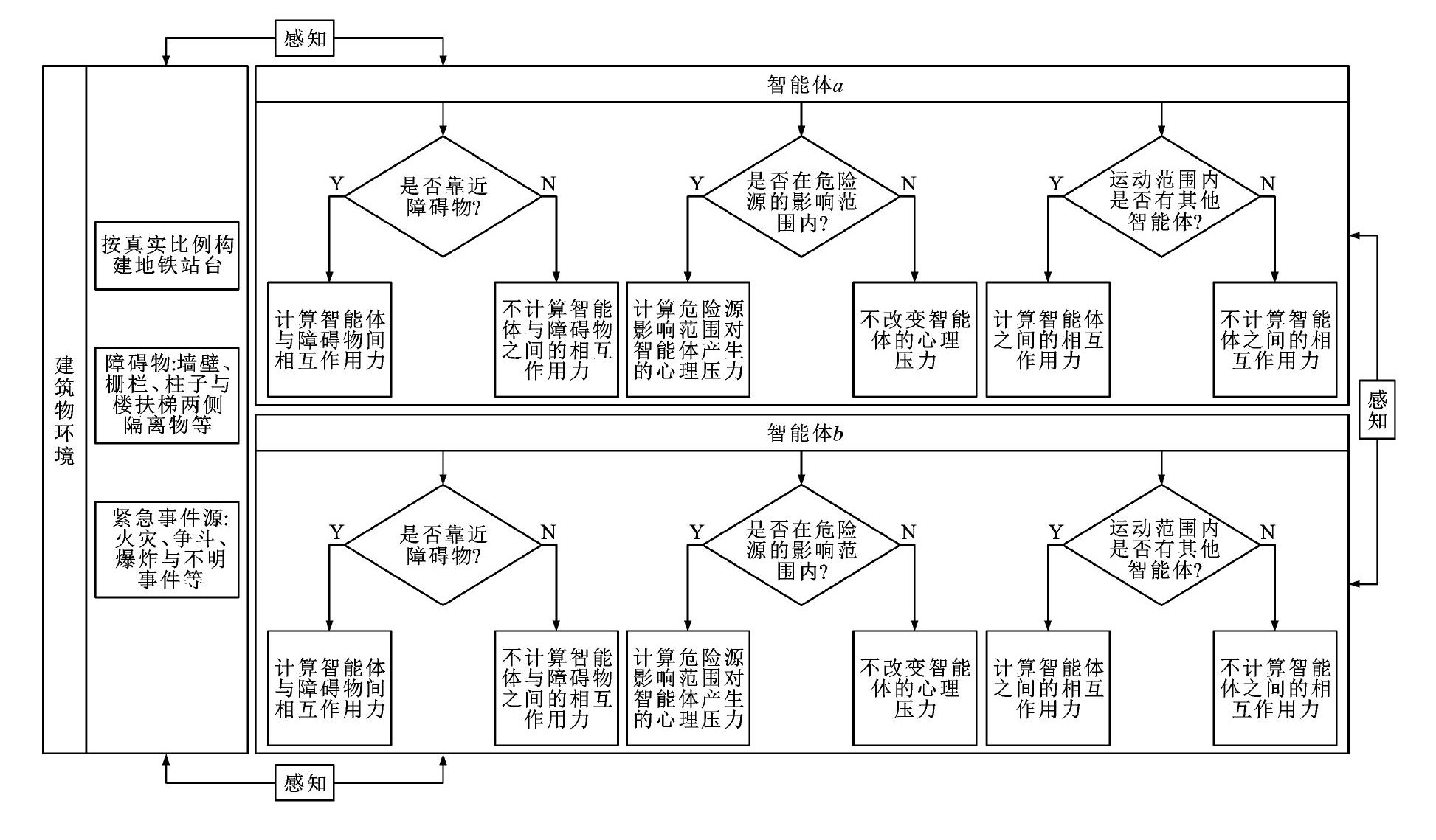
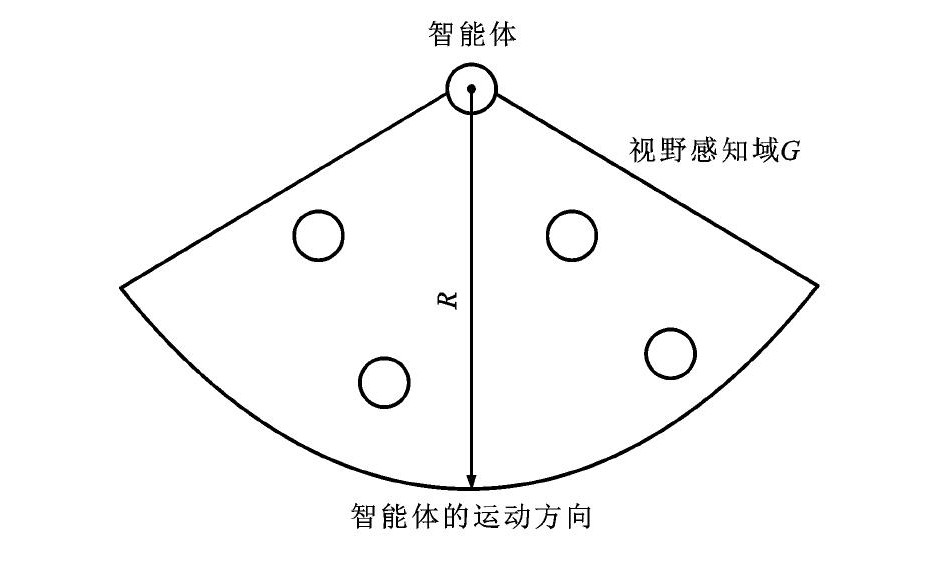
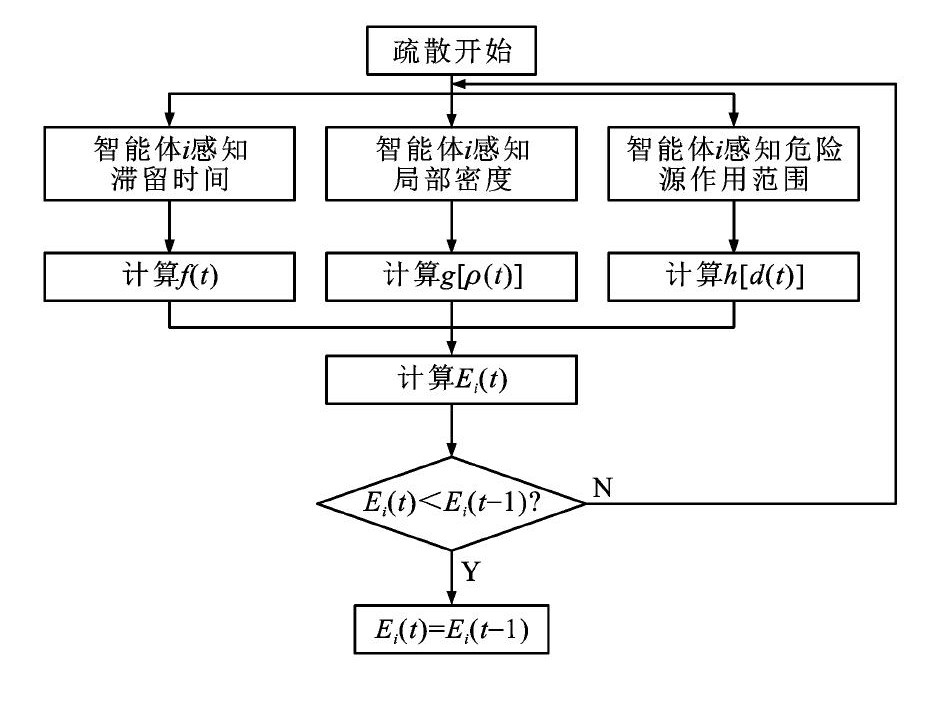
考虑心理压力的地铁站台乘客疏散模型
陈绍宽
,
狄月
,
李芳
,
许奇
,
刘海东
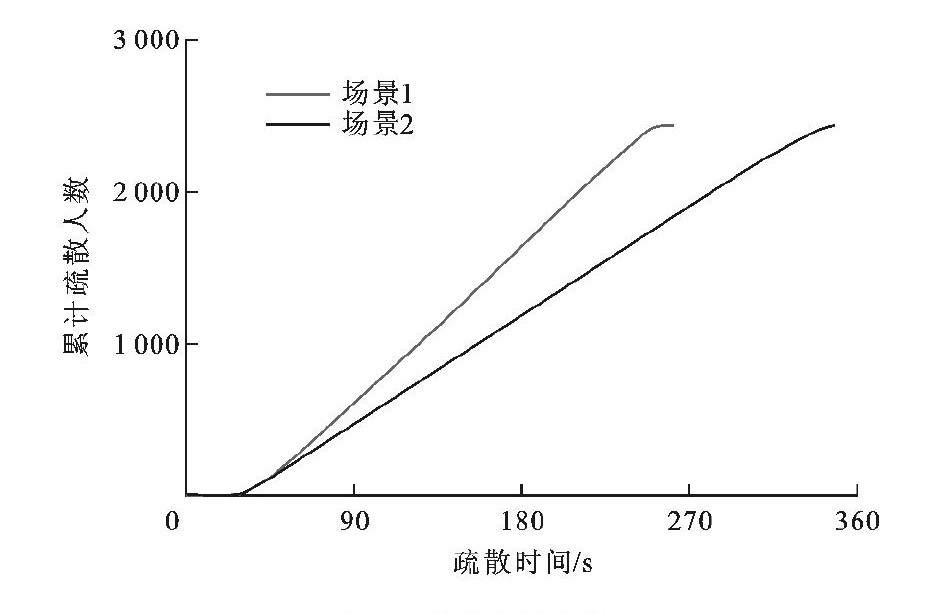
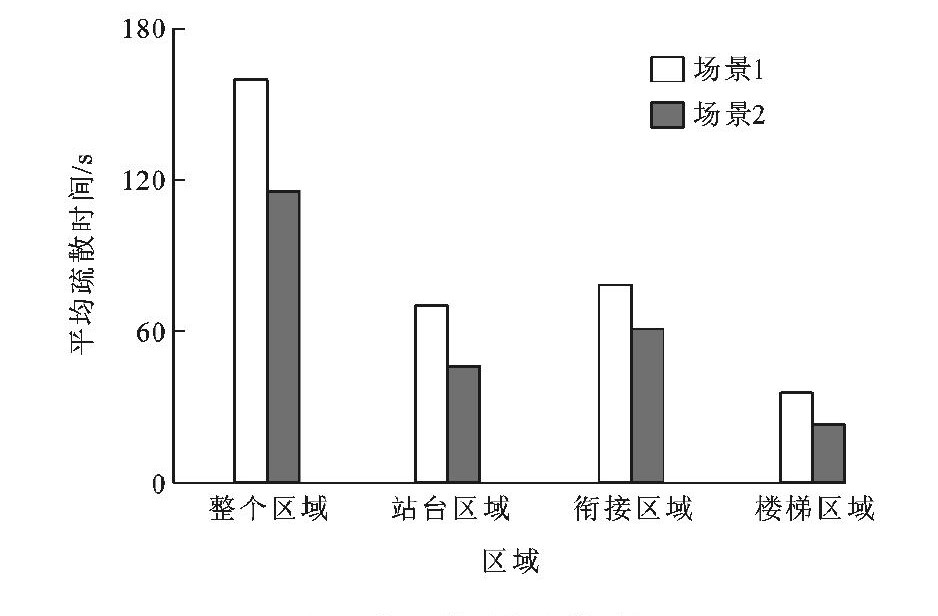
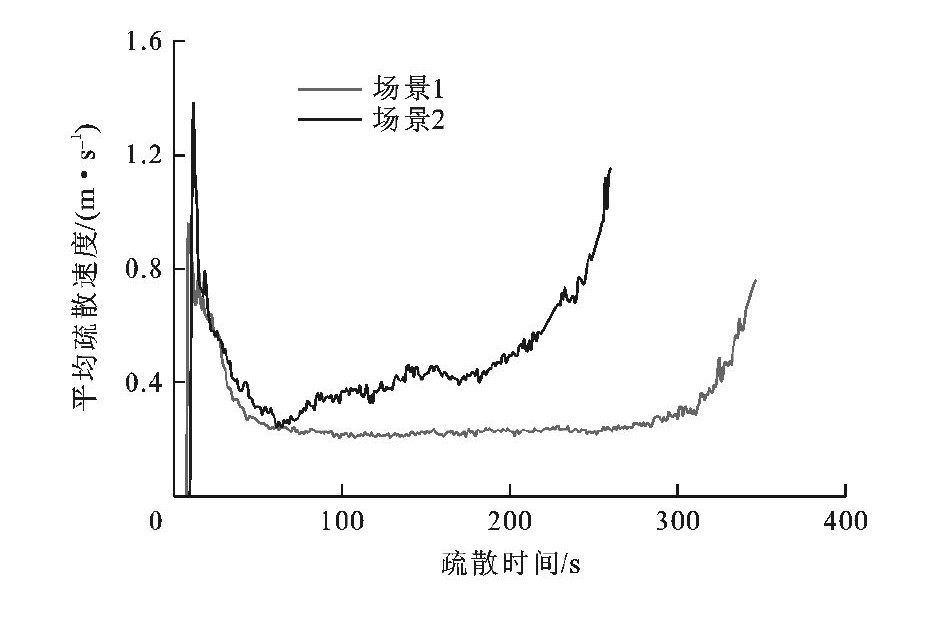
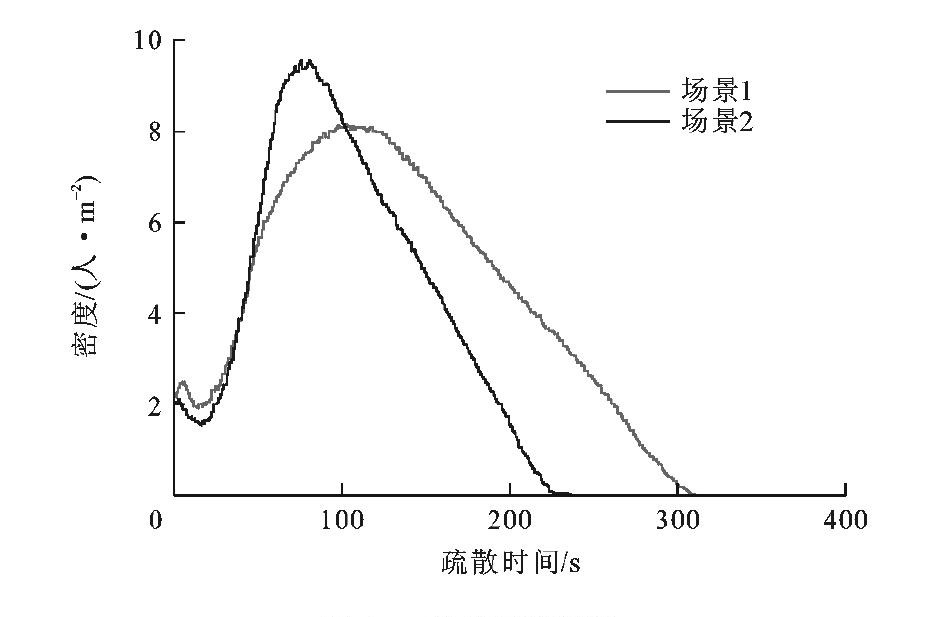
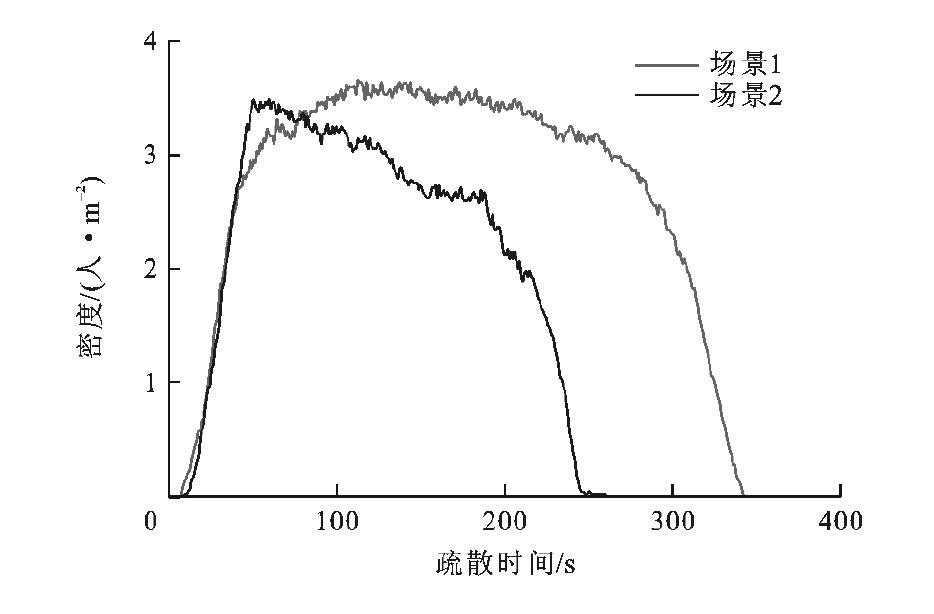
摘要:
分析了紧急情况造成的心理压力对地铁站台乘客疏散行为产生的影响, 建立了心理压力与滞留时间、局部密度、危险源距离的数量关系; 研究了心理压力下的疏散期望速度, 建立了修正期望速度模型, 并修正了社会力模型; 针对站台乘客疏散过程, 设计了多智能体感知和决策流程, 建立了基于多智能体技术的疏散仿真模型, 对乘客从接收疏散信号到疏散完成的全过程进行抽象化处理; 运用AnyLogic仿真软件搭建仿真场景, 并将建立的多个模型以接口方式导入仿真软件, 基于北京地铁2号线西直门站台, 研究了乘客的疏散行为。仿真结果表明: 心理压力对疏散时间、疏散速度、乘客密度与绕行距离产生了较大影响, 有心理压力时乘客疏散效率较无心理压力时增大了24.03%, 整体平均疏散时间减少了27.68%, 楼梯区域平均疏散时间减少了36.20%, 衔接区域平均疏散时间减少了22.05%;有心理压力的乘客在楼梯区域的平均疏散速度约为0.226m·s
-1
, 无心理压力时约为0.351m·s
-1
; 在衔接区域, 有心理压力的乘客最高聚集密度达8.0人·m
-2
, 无心理压力时达到9.5人·m
-2
, 楼梯区域乘客聚集密度最大值均约为3.5人·m
-2
; 有心理压力的乘客平均绕行距离较无心理压力时增加了96.91%, 乘客运动更加混乱。
更多>
2017, 17(5): 113-120.
摘要
(
776
)
HTML
(
146
)
PDF (1230KB)
(
782
)
引用
(
)
交通信息工程及控制
路面检测技术综述
马建
,
赵祥模
,
贺拴海
,
宋宏勋
,
赵煜
,
宋焕生
,
程磊
,
王建锋
,
袁卓亚
,
黄福伟
,
张健
,
杨澜
摘要:
总结了路面检测重要研究成果, 分析了路面损坏、平整度、车辙、抗滑性能(构造深度) 和结构强度(弯沉) 检测技术的发展现状, 研究了路面检测技术的不足与发展方向。研究结果表明: 国内外路面检测技术的发展经历了3个阶段, 从早期传统的人工检测到20世纪末的半自动化检测, 发展到目前的无损自动检测; 无损自动检测的主要特点是快速与智能化, 采用多源传感器协同工作, 并且集成在多功能道路检测车上, 能够同时检测路面损坏、平整度、车辙、抗滑性能和结构强度以及道路线形与沿线设施等; 在路面损坏检测方面, 采用数字图像检测技术, 实现了路面裂缝的快速检测; 在路面平整度检测方面, 采用激光位移传感技术, 实现了快速自动化检测; 在路面车辙检测方面, 采用激光和数字图像技术, 实现了非接触智能化检测; 在路面抗滑性能和结构强度检测方面, 建立了铺砂法与贝克曼梁法检测结果的相关关系, 实现了基于激光技术的路面构造深度与弯沉快速检测; 为了减少外界因素对现有检测技术和检测设备的干扰, 提高检测信号的信噪比, 应该开发适合各种工况下的路面检测和数据处理方法, 实现路面检测高效化与智能化。
更多>
2017, 17(5): 121-137.
摘要
(
2458
)
HTML
(
1514
)
PDF (891KB)
(
2105
)
引用
(
)
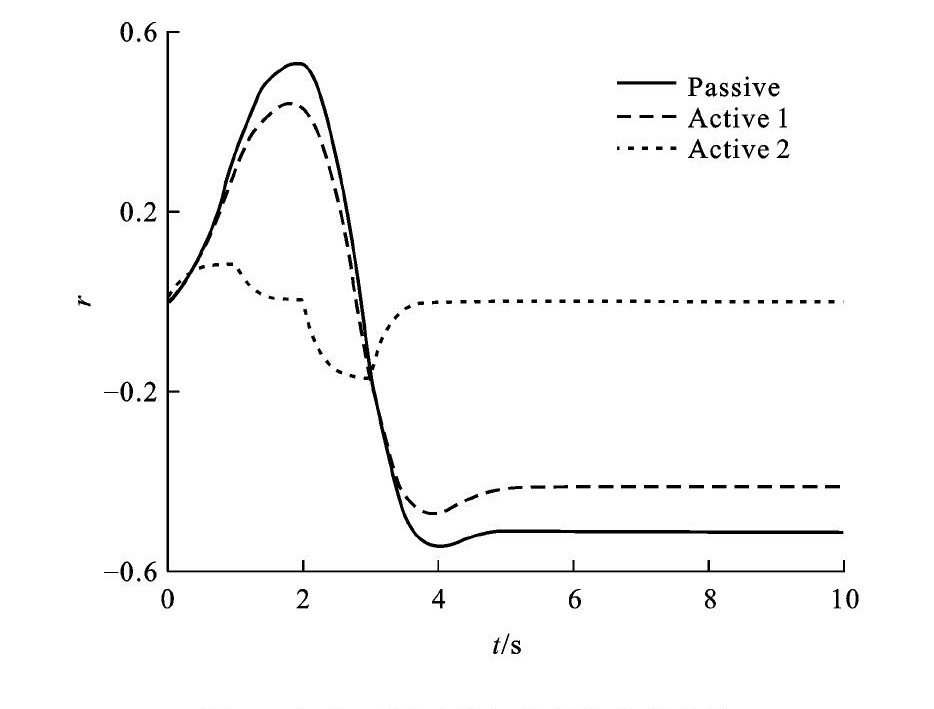
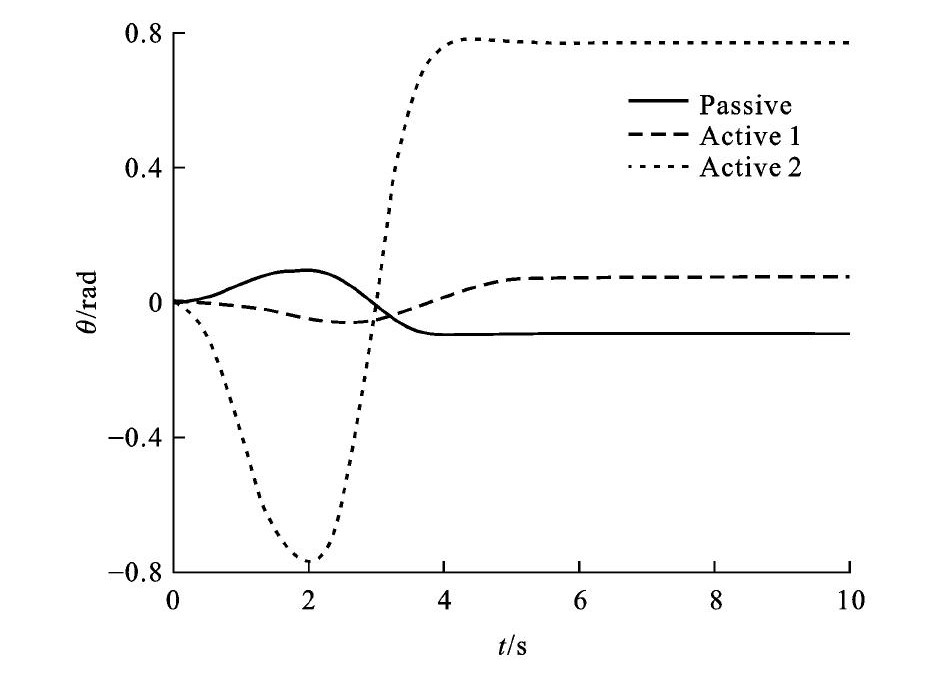
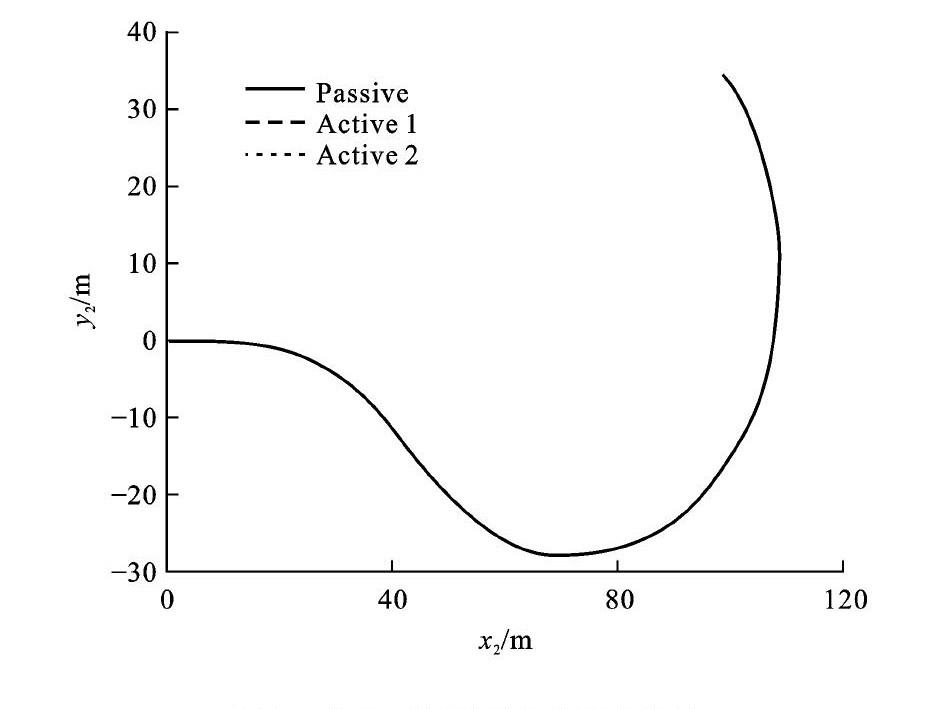
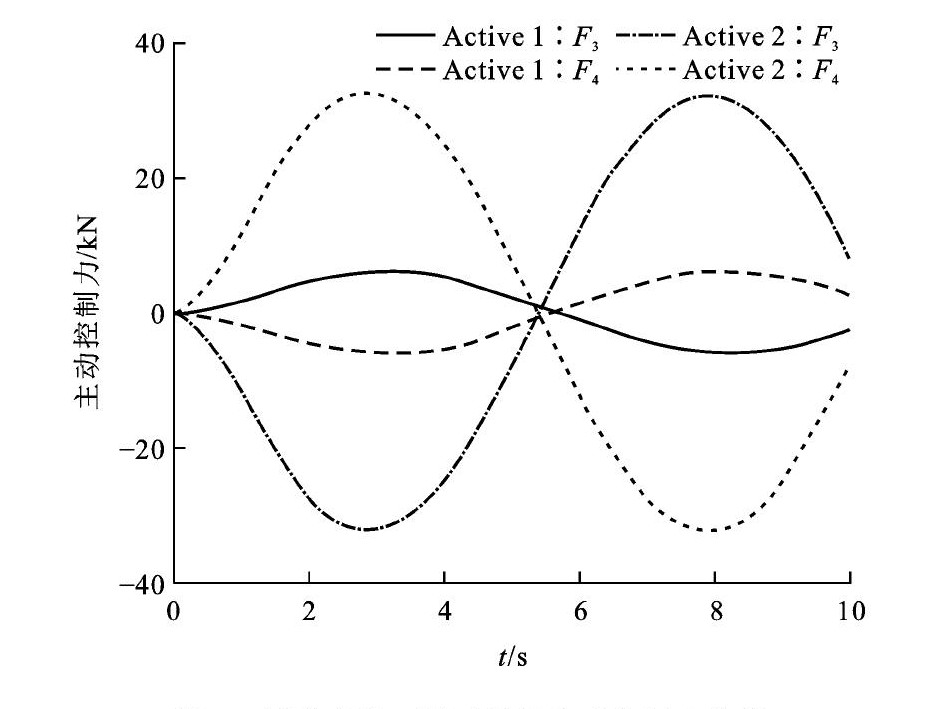
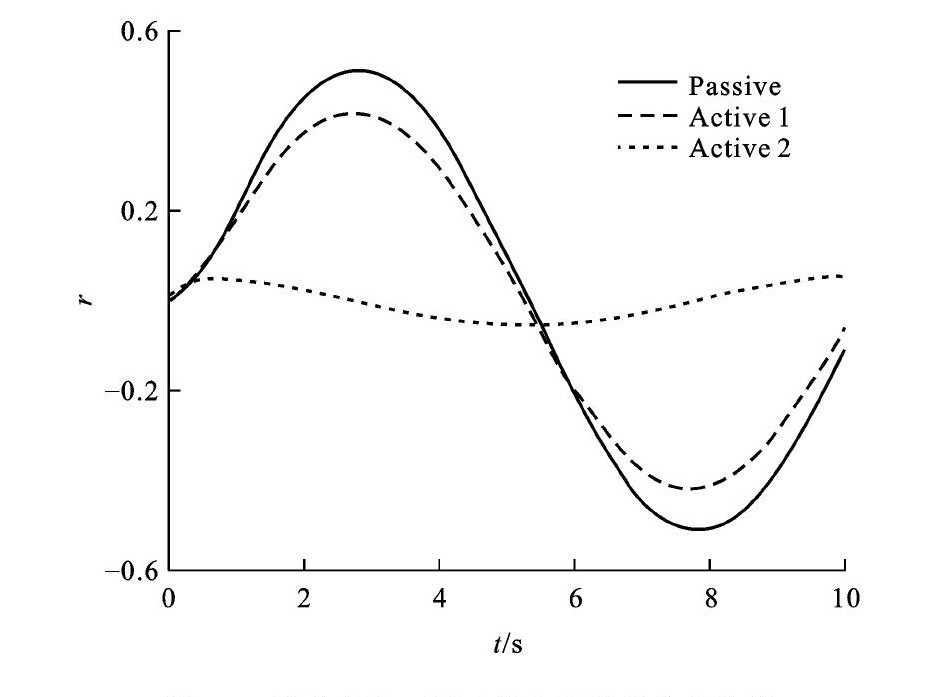
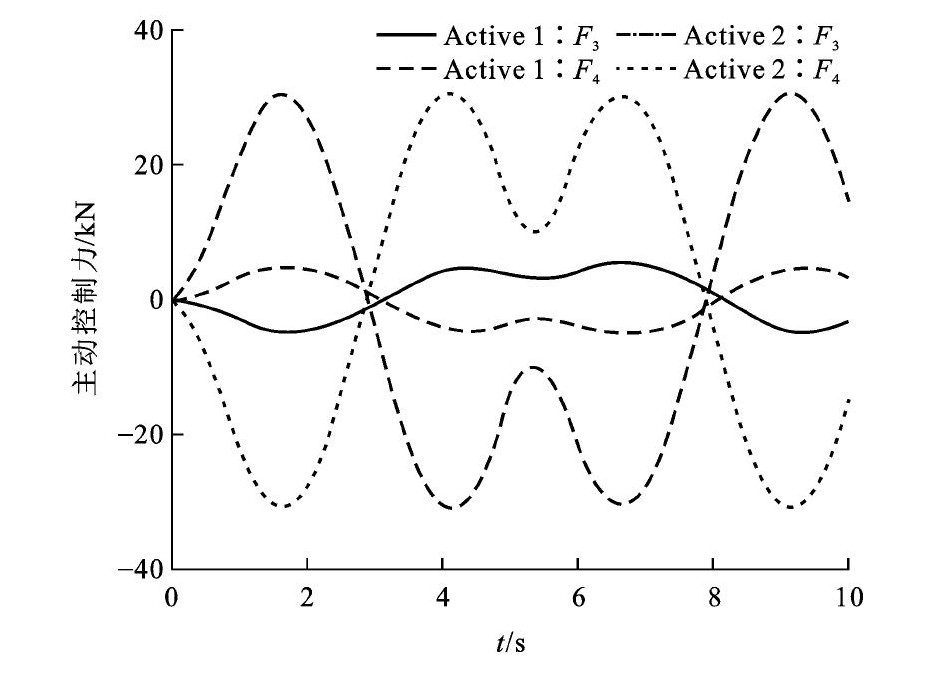
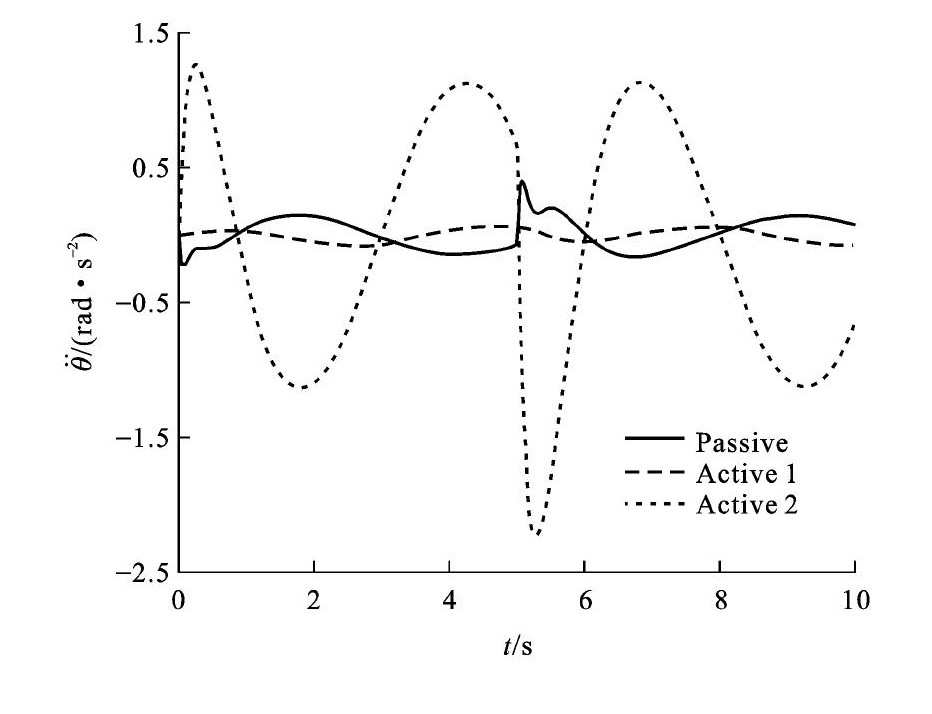
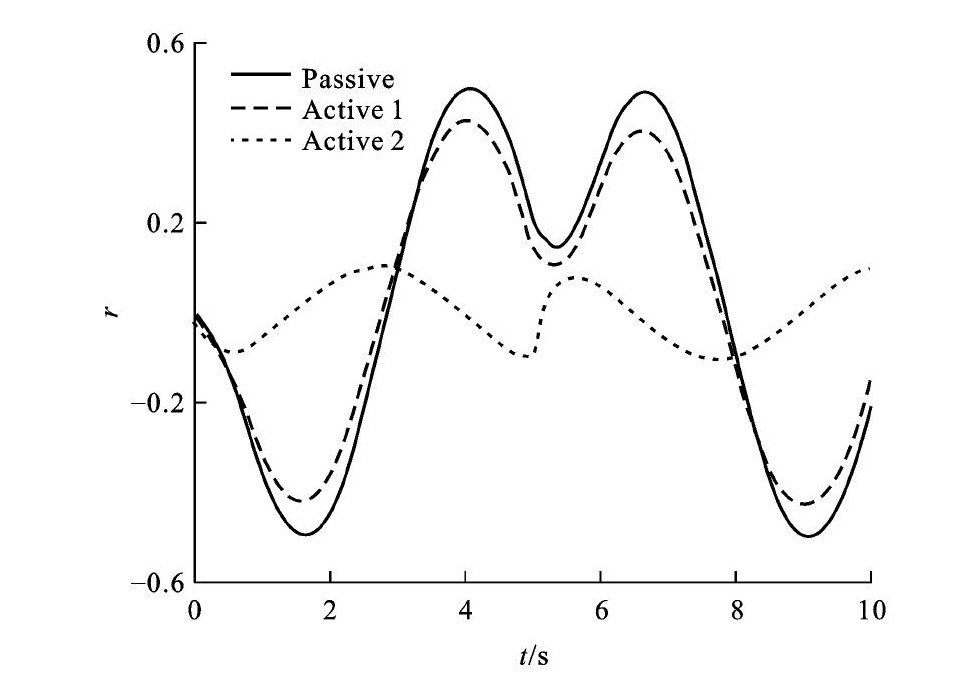
汽车侧倾运动安全主动悬架LQG控制器设计方法
王亚雄
,
蔡宇萌
,
王健
,
姚明
,
陈士安
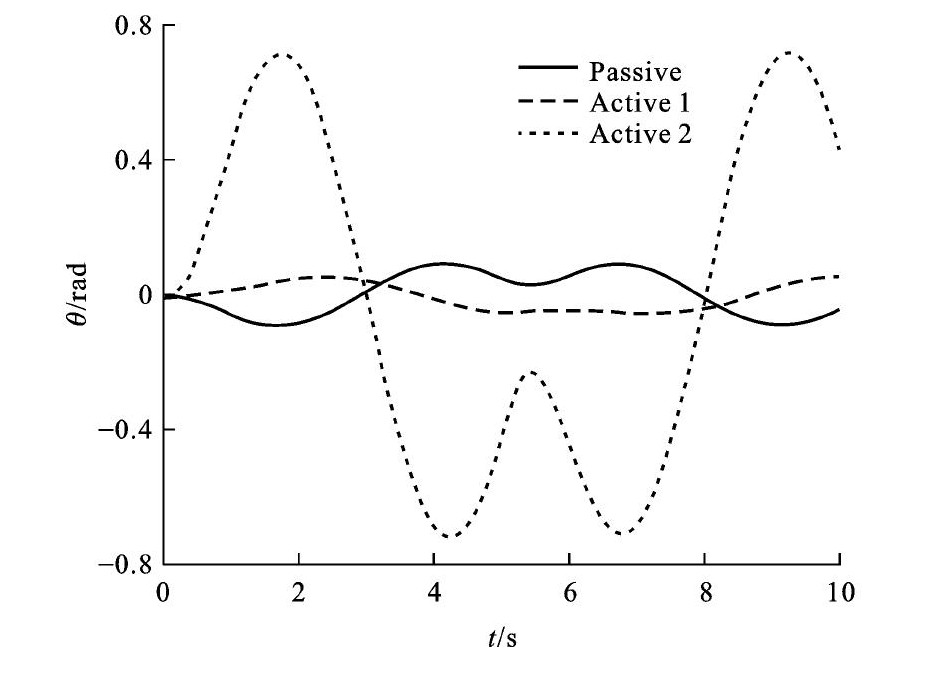
摘要:
为了提高汽车转向-侧倾运动的安全性, 设计了主动悬架侧倾运动安全LQG控制器; 建立了3自由度汽车转向-侧倾运动动力学模型, 选择横向载荷转移率、侧倾角及其加速度构建汽车侧倾安全综合性能评价指标; 为了解决现有设计方法无法跟踪系统干扰项(前轴转向角) 和控制加权矩阵行列式等于零带来的控制向量无法求解的难题, 将前轴转向角进行满足最小相位系统的微分变形, 并与原系统方程组成增广系统方程, 在综合性能评价指标中引入包含控制项的无穷小量, 以满足LQG控制器设计条件; 结合层次分析法和归一法, 以鱼钩工况为基础, 仿真获取汽车转向-侧倾运动统计数据, 进而确定LQG控制器的加权系数, 通过多工况数值仿真验证主动悬架侧倾运动安全LQG控制器的工作效果。仿真结果表明: 新设计的LQG控制器不干扰驾驶人的转向操纵; 与被动悬架相比, 在鱼钩工况、蛇形穿桩工况和双移线工况下, 采用LQG控制器的主动悬架可使汽车侧倾运动安全的主要评价指标即横向载荷转移率的方差分别降低了32.08%、32.82%、29.24%, 侧倾角的方差分别降低了47.74%、44.19%、63.41%, 侧倾角加速度的方差分别降低了87.30%、60.00%、86.39%, 说明采用新设计LQG控制器的主动悬架可大幅度改善汽车侧倾运动安全性, 且具有良好的转向工况适应性。
更多>
2017, 17(5): 138-148.
摘要
(
417
)
HTML
(
78
)
PDF (696KB)
(
428
)
引用
(
)
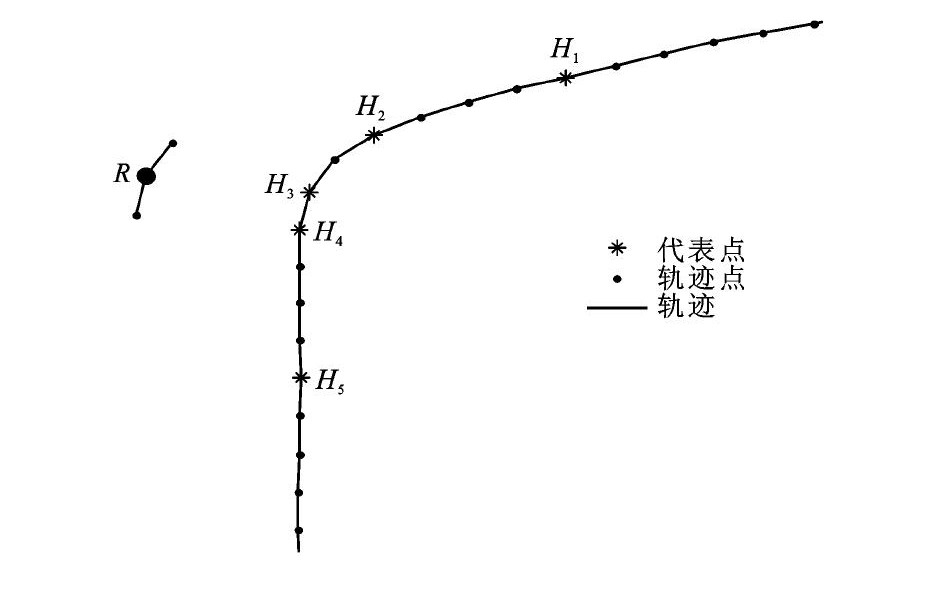
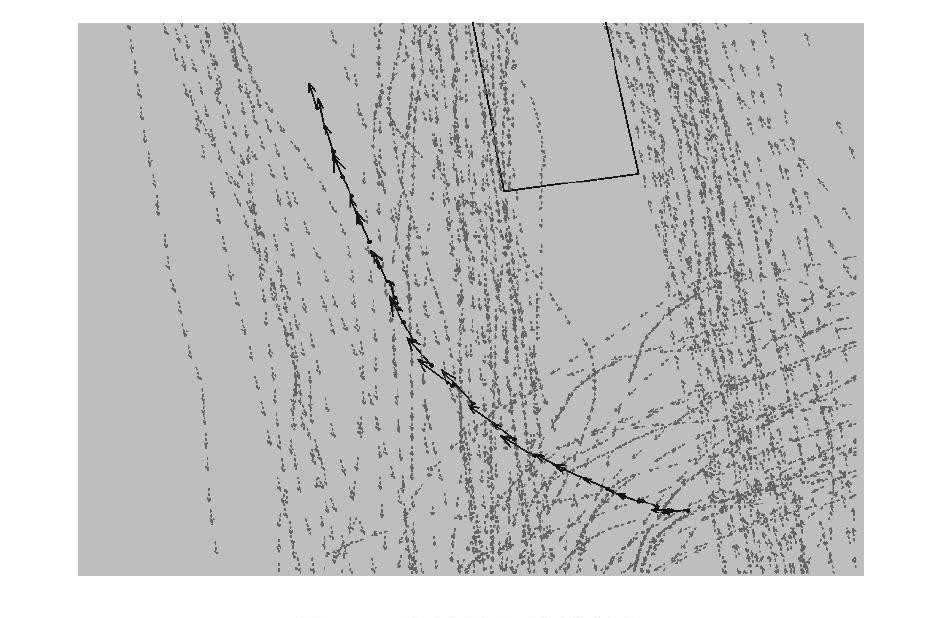
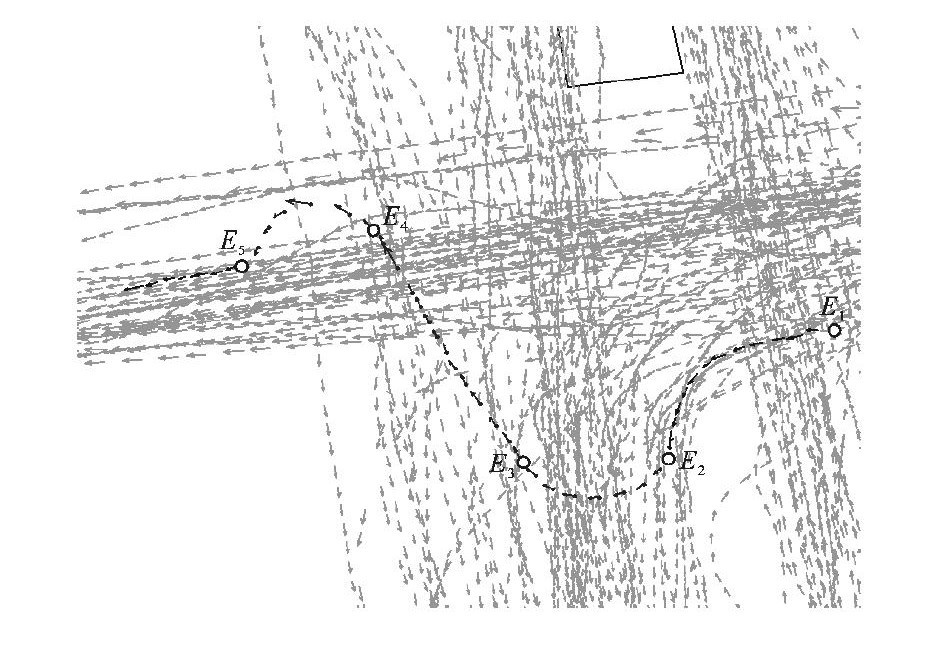
船舶异常行为的一致性检测算法
马文耀
,
吴兆麟
,
李伟峰
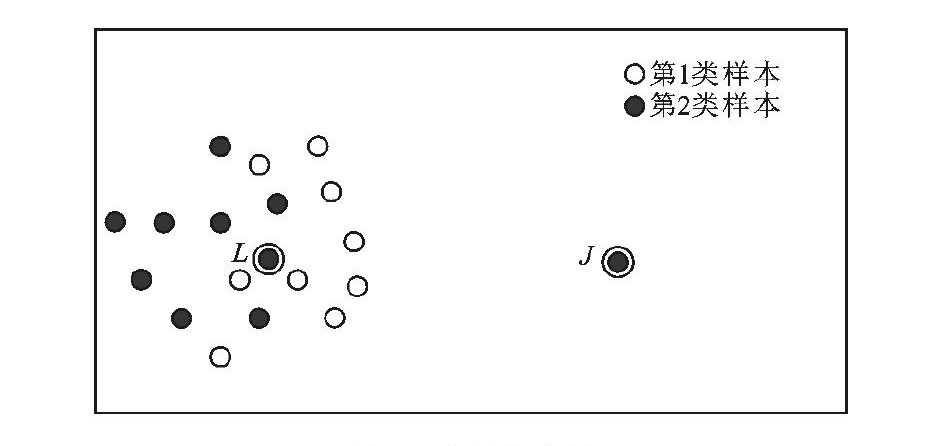
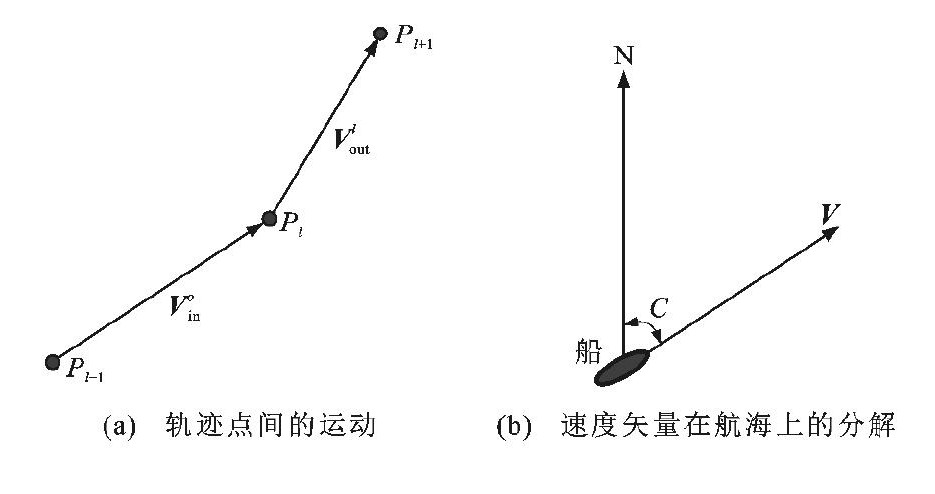
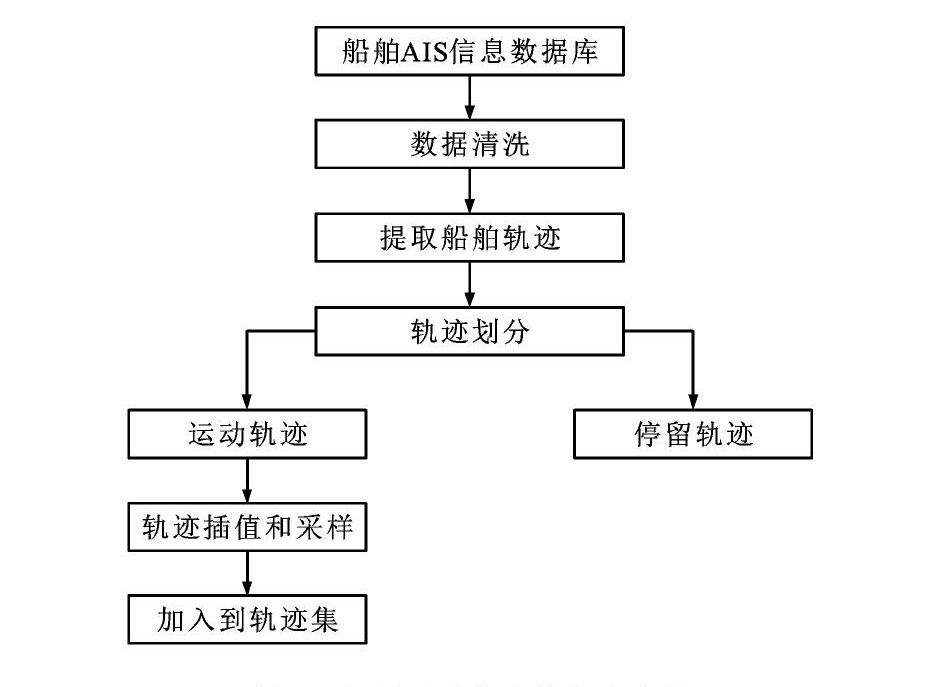
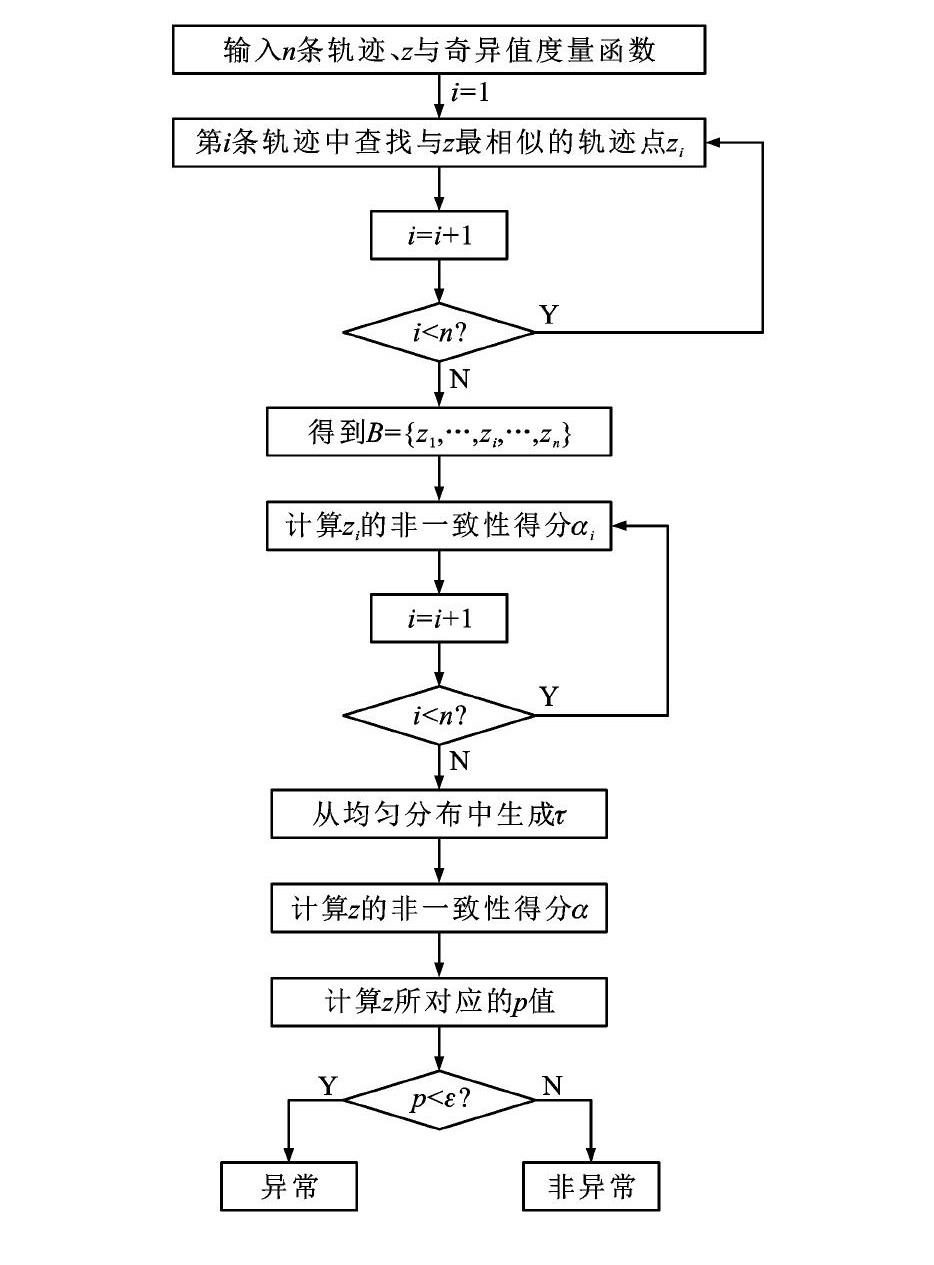
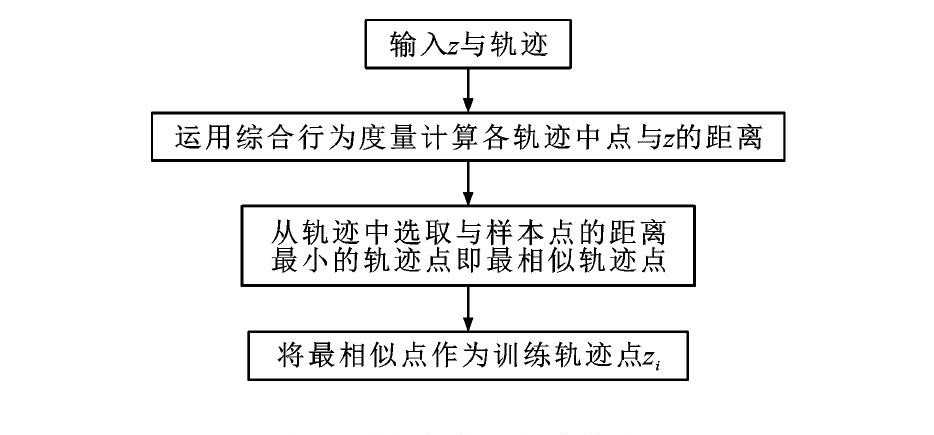
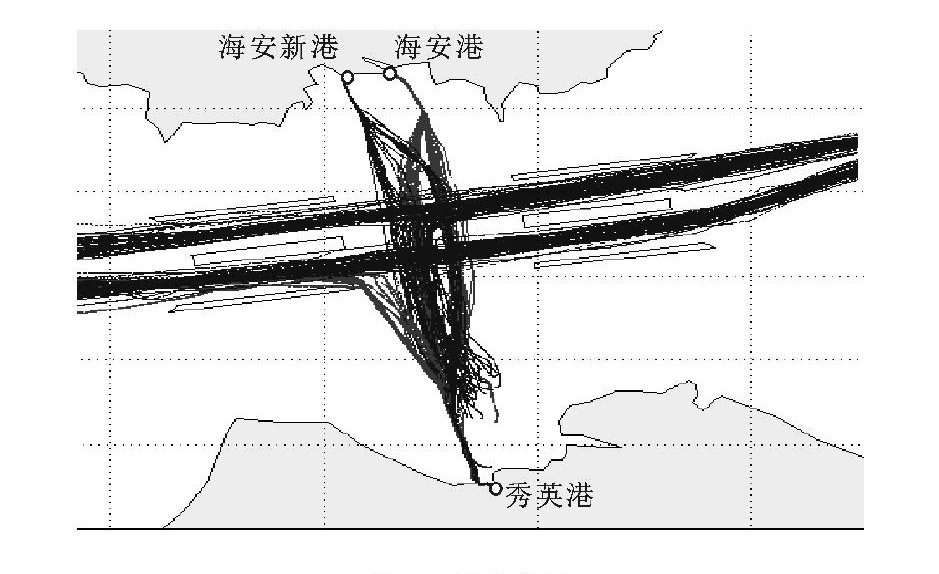
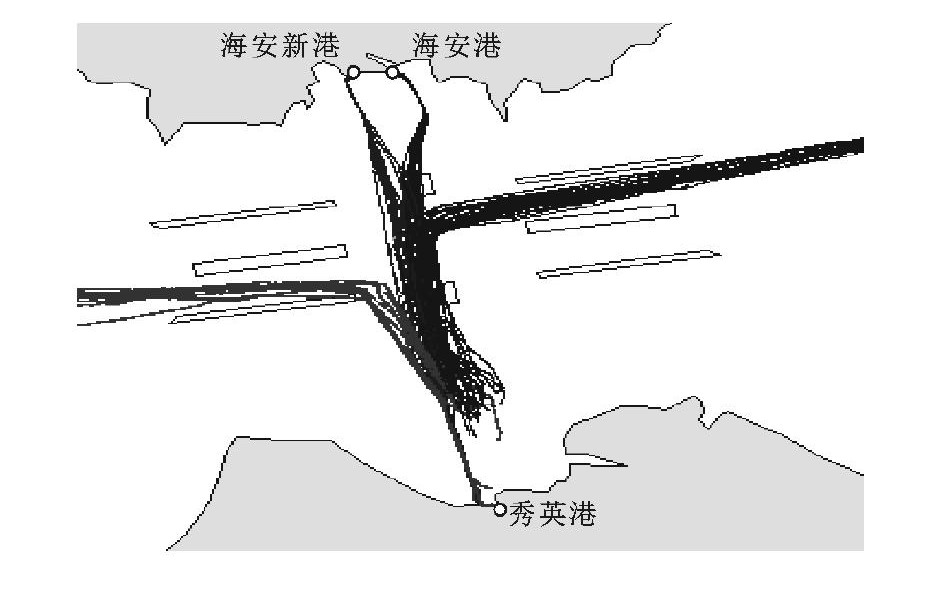
摘要:
为了准确检测船舶的操纵异常行为和降低异常行为误报警率, 提出了船舶异常行为的一致性检测算法; 在船舶轨迹点中引入能够体现操纵模式的特征, 以转向行为与变速行为度量了操纵行为相似性; 将空间位置相似性与操纵行为相似性进行组合, 定义了船舶综合行为相似性, 计算了单个轨迹点与训练轨迹序列中的最近邻特征点, 构建了一致性检测的样本序列; 为克服样本重叠的类分布情形, 改进了一致性检测算法的奇异值度量, 并用综合行为相似性计算样本间的非一致性得分, 利用单个轨迹点的随机性检验值判断该轨迹点与样本序列的分布一致性; 以琼州海峡实测AIS数据作为正常数据, 以计算机模拟随机产生异常轨迹和人工自定义操纵异常行为作为异常数据, 分别进行异常检测试验。试验结果表明: 随机产生的异常轨迹检测正确率为100%, 但是轨迹评价集中有一部分正常轨迹被错误划分成异常轨迹, 在指定置信度水平分别为99.0%和99.7%的情形下, 误报警率分别为0.6%和0.2%, 分别低于显著性水平0.01和0.003, 因此, 利用一致性检测算法能有效检测计算机产生的随机异常轨迹, 并可通过指定显著性水平严格控制检测误报警率, 能有效检测人工自定义的船舶变速与转向异常行为, 而且检测结果能随船舶行为改变而变化。
更多>
2017, 17(5): 149-158.
摘要
(
601
)
HTML
(
138
)
PDF (1655KB)
(
1149
)
引用
(
)
文章推荐
更多>
长寿命UHPFRC组合钢桥面板研究综述
桥梁工程中非接触位移测量技术研究综述
钢桥疲劳研究进展
国家自然科学基金委员会交通与运载工程学科2023年度管理工作综述
桥梁火灾科学与安全保障技术综述
低空空域容量评估研究综述
自动驾驶测试与评价技术研究进展
自动驾驶测试公共服务平台建设与思考
众包配送研究综述
图神经网络在交通预测中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
“综合交通/新型交通与新兴交叉技术”专刊征稿启事
《交通运输工程学报》入选 “2021年百种中国杰出学术期刊”
《交通运输工程学报》入选“2022 年度中国高校科技期刊建设示范案例库•杰出科技期刊”
《交通运输工程学报》2021年入选“三秦卓越科技期刊”
《交通运输工程学报》入选 “2022年百种中国杰出学术期刊”
《交通运输工程学报》2021年荣获“第五届中国出版政府奖提名奖”
作者园地
更多>
诚聘青年编委
《交通运输工程学报》推荐外籍编委
关于文章中的中国地图
科技名词英汉对照
2017年4月Ei刊源
学术会议
更多>
民航机场工程技术创新论坛
第三届国际无伸缩缝与可持续桥梁研讨会
第十届全国交通运输领域青年学术会议
友情链接
更多>
长安大学
长安大学学术期刊管理中心
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式