| Citation: | DING Peng-chong, SHANGGUAN Wei, CHEN Jun-jie, CHAI Lin-guo, PENG Jia-li. End-to-end two-layer planning and optimization method for UAV swarm spider web-inspired coverage search[J]. Journal of Traffic and Transportation Engineering, 2026, 26(4): 33-49. doi: 10.19818/j.cnki.1671-1637.2026.162

|

| [1] |
CHEN Cong, ZHANG Guo-hui, MA Xiao-lei, et al. Big data analysis and knowledge discovery for smart city development enhancement [J]. Big Data Research, 2016, 2(3): 39-48.
|
| [2] |
XU Zhi-gang, SHEN Dan-dan, GAO Ying, et al. Review of multimodal transport research based on bibliometrics[J]. Journal of Traffic and Transportation Engineering, 2025, 25(2): 37-60. doi: 10.19818/j.cnki.1671-1637.2025.02.003
|
| [3] |
LI Chen-wei, ZHOU Jian-shan, TIAN Da-xin, et al. Key technology for integrated communication sensing and computing in three-dimensional transportation system[J]. Mobile Communications, 2024, 48(3): 14-20.
|
| [4] |
ZHANG Hong-hai, YI Jia, LI Shan, et al. Review on research of low-altitude airspace capacity evaluation [J]. Journal of Traffic and Transportation Engineering, 2023, 23(6): 78-93. doi: 10.19818/j.cnki.1671-1637.2023.06.003
|
| [5] |
LIU Wen-xue, HOU Cong, YANG Ya-lian, et al. Analysis of key performance metrics of electric flying cars for urban air mobility [J]. Journal of Mechanical Engineering, 2024, 60(22): 257-275.
|
| [6] |
YANG Cheng, GAO Jian-xun. Reliability analysis of UAV based on fault tree analysis[J]. Environmental Technology, 2022, 40(6): 122-126.
|
| [7] |
DAI X H, DUO B, YUAN X J, et al. Energy-efficient UAV communications: A generalized propulsion energy consumption model [J]. IEEE Wireless Communications Letters, 2022, 11(10): 2150-2154. doi: 10.1109/LWC.2022.3195787
|
| [8] |
BLAKESLEY A, ANVARI B, KROLL J, et al. Minimum energy route optimisation of a quad-copter UAV with landing incentivisation[C]//IEEE. 2022 IEEE International Conference on Intelligent Transportation Systems. New York: IEEE, 2022: 2300-2306.
|
| [9] |
OUYANG Quan, XU Luo-min, YANG Ji-yang, et al. Energy-efficient trajectory planning for quadrotor UAVs: A segmented Gaussian pseudospectral method [J]. Electronics Optics & Control, 2025, 32(1): 1-7.
|
| [10] |
IM H S, KIM K Y, LEE S H. Trajectory optimization for cellular-enabled UAV with connectivity and battery constraints[J]. IEEE Transactions on Vehicular Technology, 2025, 74(11): 17812-17828. doi: 10.1109/TVT.2025.3579005
|
| [11] |
FENG Q, LIU M, DUI H Y, et al. Importance measure-based phased mission reliability and UAV number optimization for swarm[J]. Reliability Engineering & System Safety, 2022, 223: 108478.
|
| [12] |
ALZENAD M, El-KEYI A, LAGUM F, et al. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage[J]. IEEE Wireless Communications Letters, 2017, 6(4): 434-437. doi: 10.1109/LWC.2017.2700840
|
| [13] |
HUANG H L, HUANG C, MA D Z. A method for deploying the minimal number of UAV base stations in cellular networks[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 559-567. doi: 10.1109/JAS.2019.1911813
|
| [14] |
SABZEHALI J, SHAH V K, FAN Q, et al. Optimizing number, placement, and backhaul connectivity of multi-UAV networks[J]. IEEE Internet of Things Journal, 2022, 9(21): 21548-21560. doi: 10.1109/JIOT.2022.3184323
|
| [15] |
SHEN Dong, WEI Rui-xuan, QI Xiao-ming, et al. Receding horizon decision method based on MTPM and DPM for multi-UAVs cooperative large area target search[J]. Acta Automatica Sinica, 2014, 40(7): 1391-1403.
|
| [16] |
WEN Chao, DONG Wen-han, XIE Wu-jie, et al. Distributed cooperative area search method for UAV swarms based on revisit mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 253-270.
|
| [17] |
WU Tao, CHEN Si-heng, LUO Ze-lin, et al. Path planning method for multi-UAV coverage search based on probability graph[J]. Information Countermeasure Technology, 2025, 4(4): 30-42.
|
| [18] |
ARAÚJO J F, SUJIT P B, SOUSA J B. Multiple UAV area decomposition and coverage[C]//IEEE. 2013 IEEE Symposium on Computational Intelligence for Security and Defense Applications. New York: IEEE, 2013: 30-37.
|
| [19] |
CHEN Y Y, ZHANG H D, XU M. The coverage problem in UAV network: A survey[C]//IEEE. Fifth International Conference on Computing Communications and Networking Technologies. New York: IEEE, 2014: 1-5.
|
| [20] |
LIU Z, GAO X, FU X. A cooperative search and coverage algorithm with controllable revisit and connectivity maintenance for multiple unmanned aerial vehicles[J]. Sensors, 2018, 18(5): 1472. doi: 10.3390/s18051472
|
| [21] |
LIU Quan-yi, LIU Ji-hao, AI Hong-zhou, et al. Coverage search methods for complex mountainous areas using hybrid strategy [J]. Journal of Tsinghua University (Science and Technology), 2026, 66(2): 233-240.
|
| [22] |
CHEN Jia-yu, LI Wen, LI Tai-rong, et al. Q-learning based dual drone coverage path planning[J]. Journal of Telemetry, Tracking and Command, 2025, 46(4): 96-104.
|
| [23] |
WU Qing-po, ZHOU Shao-lei, YIN Gao-yang, et al. Improvement of multi-UAV cooperative coverage searching method[J]. Electronics Optics & Control, 2016, 23(1): 80-84.
|
| [24] |
VINH K, GEBREYOHANNES S, KARIMODDINI A. An area-decomposition based approach for cooperative tasking and coordination of uavs in a search and coverage mission[C]//IEEE. 2019 IEEE Aerospace Conference. New York: IEEE, 2019: 1-8.
|
| [25] |
DAI Jian, XU Fei, CHEN Qi-feng. Multi-UAV cooperative search area division and path planning [J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723770.
|
| [26] |
LI Dao-wen, YANG Xin-song, SUN Ya-ping, et al. Cooperative area coverage route planning for multi-UAVs[J/OL]. Control Engineering, 2025,
|
| [27] |
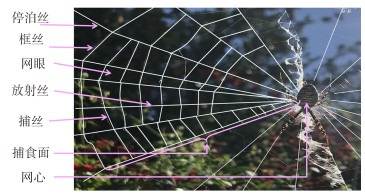
ZHUO Chun-hui, JIANG Ping, WANG Chang-he, et al. Structure and mechanical property of spider's web and their adaptations[J]. Sichuan Journal of Zoology, 2006, 25(4): 898-902.
|
| [28] |
ZHANG Xue-yang, ZENG Pei-huang. Study on structure and properties of spider web[J]. Mathematical Modeling and Its Applications, 2013, 2(1): 34-38.
|
Website copyright Journal of Traffic and Transportation Engineering Editorial Department陕ICP备05001904号-1
Address :Editorial Department of Journal of Traffic and Transportation Engineering, Chang'an University, Middle Section of South 2nd Ring Road, Xi'an, China(710064) Tel:029-82334388 Email:jygc@chd.edu.cn
All visit:Today's visit:
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: