首页
期刊简介
编委会
期刊在线
优先发表
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
作者园地
报道计划
征稿启事
投稿流程
摘要写作
投稿模板
政策法规
AI工具使用政策
科研失信行为处理
期刊编辑出版规范
出版伦理
期刊订阅
联系我们
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
优先发表
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
作者园地
报道计划
征稿启事
投稿流程
摘要写作
投稿模板
政策法规
AI工具使用政策
科研失信行为处理
期刊编辑出版规范
出版伦理
期刊订阅
联系我们
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 双月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2015年 第15卷 第6期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
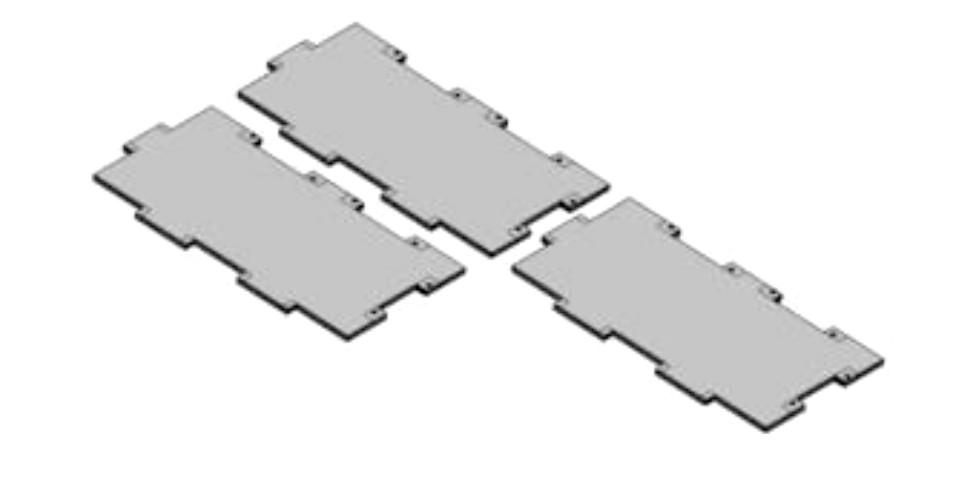
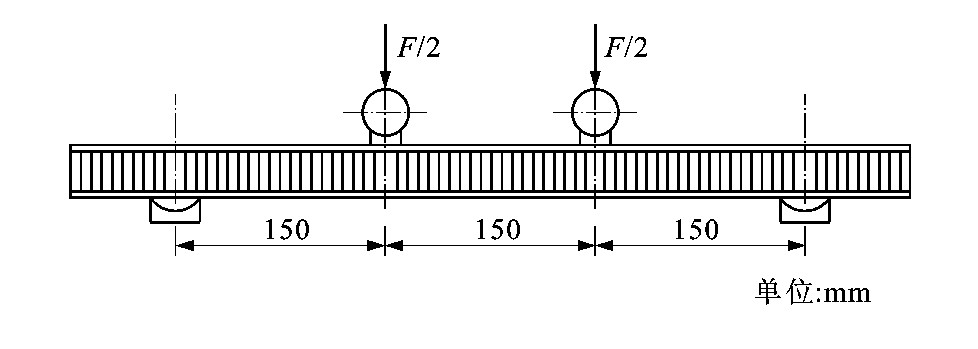
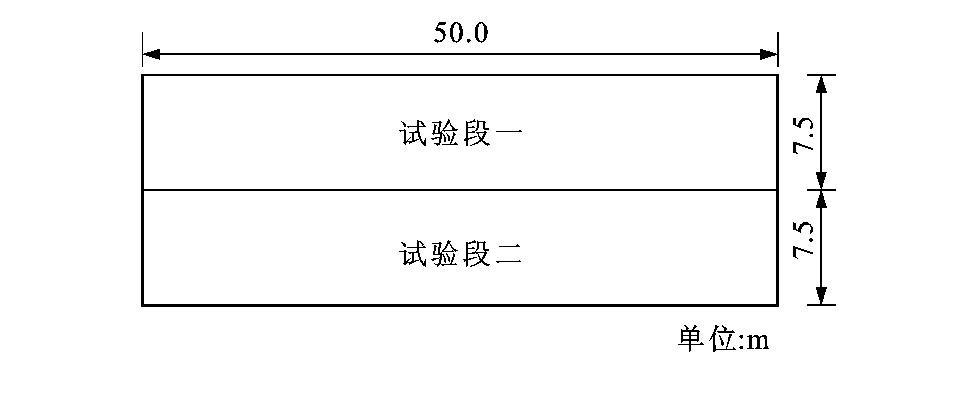
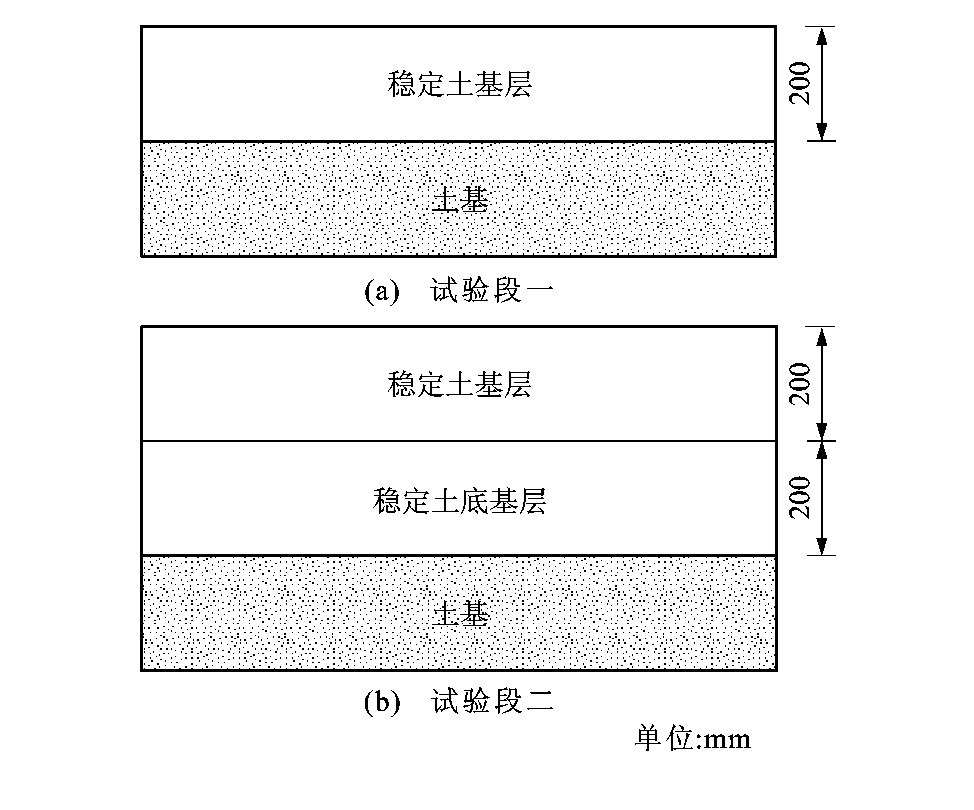
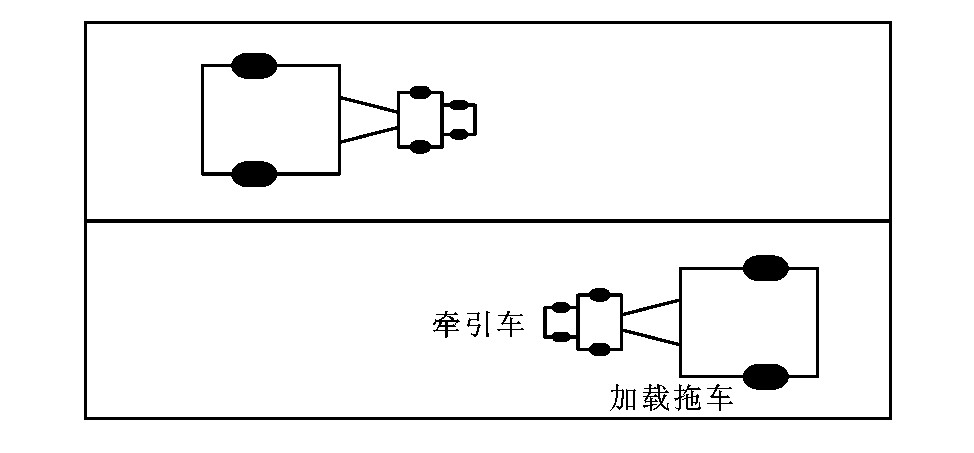
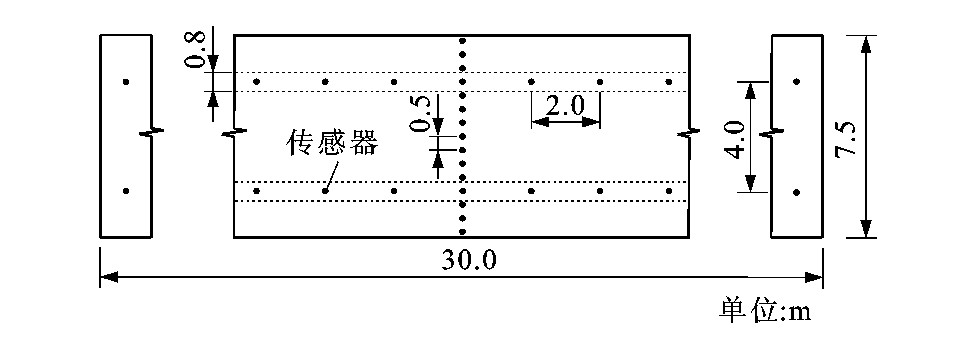
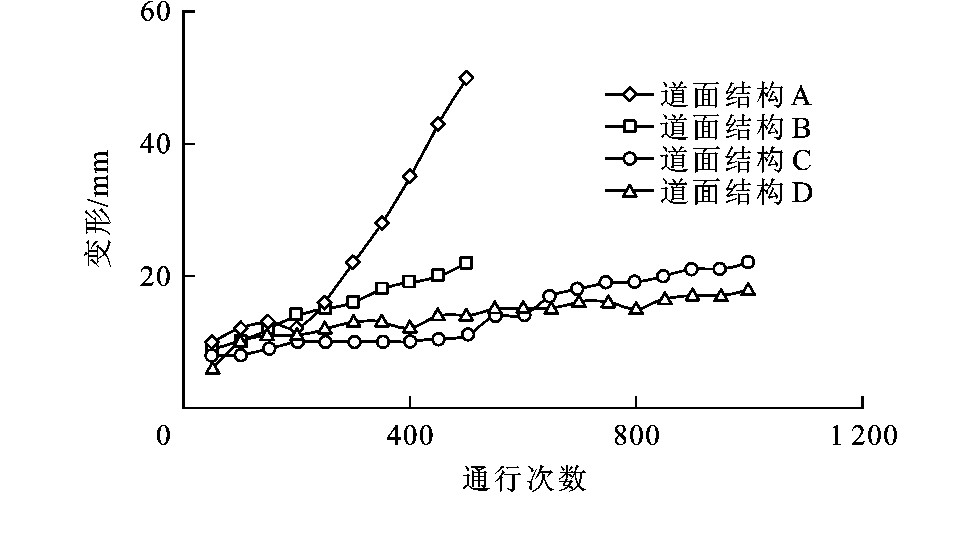
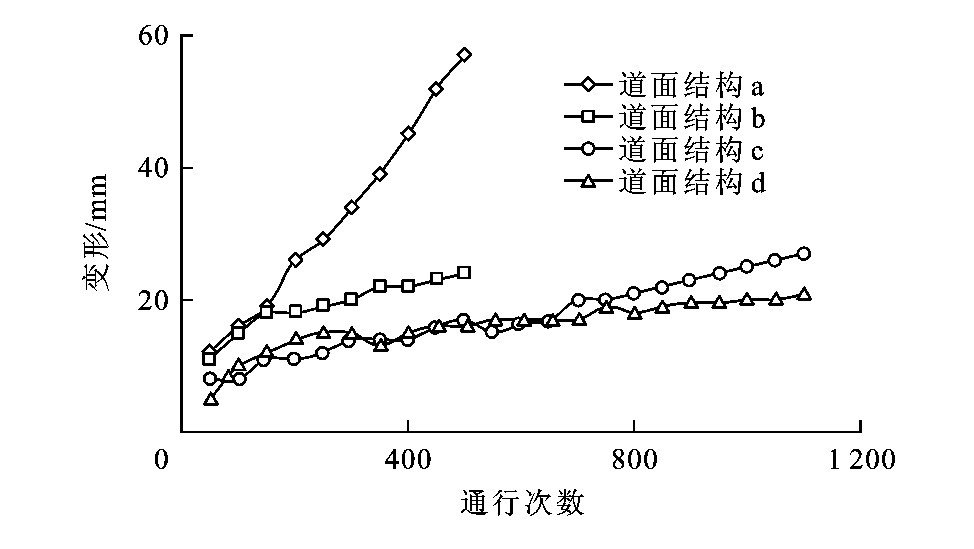
铺设拼装式铝合金道面板的道面结构加载性能
蔡良才
,
周少辉
,
许巍
,
岑国平
,
杨文山
摘要:
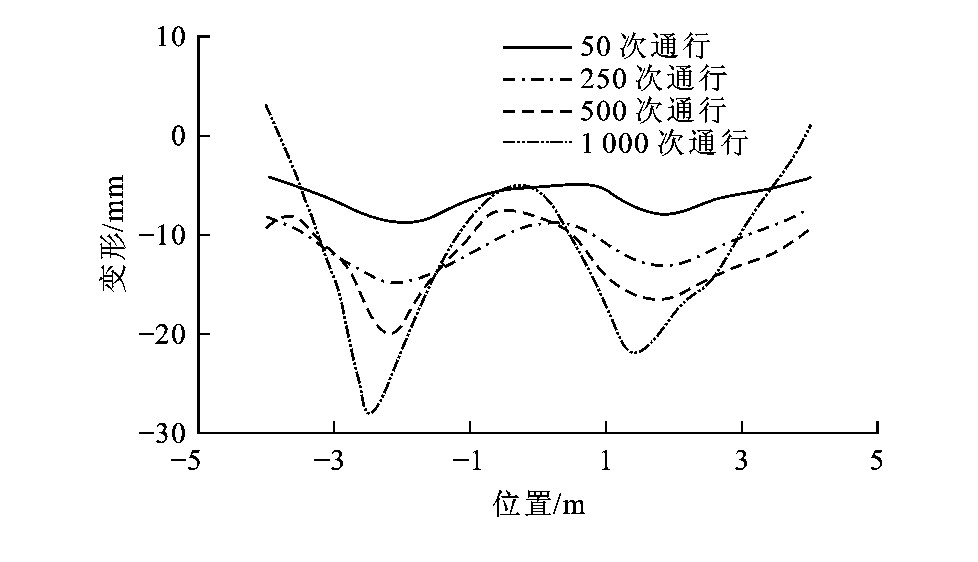
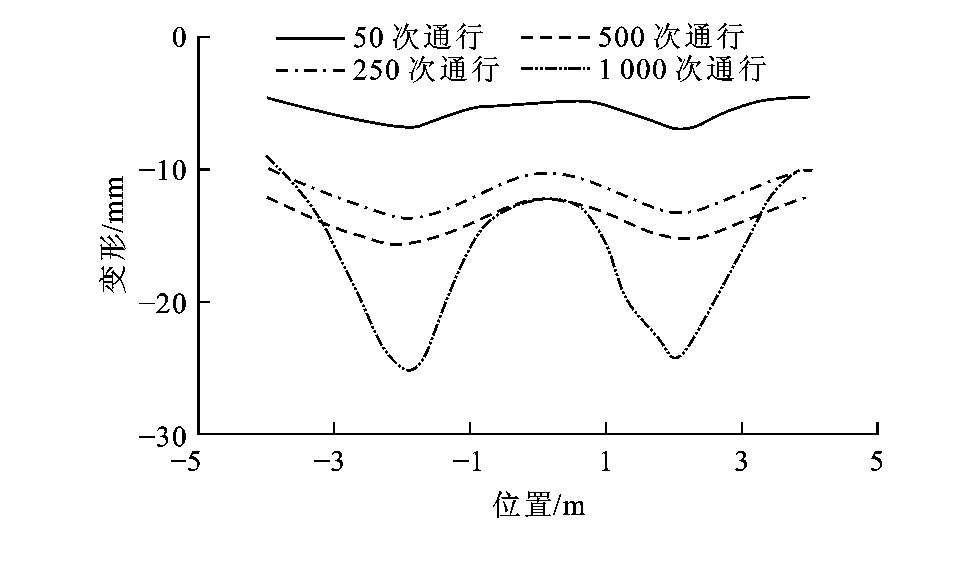
对拼装式铝道面板试样进行了四点弯曲试验以检测其强度。修建了2条不同强度的土质试验段, 分别铺设了4种不同厚度与强度的蜂窝铝夹芯道面板, 构建了不同类型的简易机场拼装式铝道面板道面结构, 采用加载车模拟轻型与重型飞机荷载, 以最大车辙达到30mm与20%的道面板出现损坏作为控制标准, 测试了拼装式道面板道面结构在不同轮载作用次数下的变形与表面车辙。试验结果表明: 道面板1~4的有效综合模量分别为1 616、1 862、2 064、2 328 MPa; 当道面板1~4分别铺设在单层稳定土基层上时, 采用75kN荷载作用, 400次通行后各道面结构的竖向变形分别为35、19、10、12mm, 500次通行后各道面结构最大相对车辙分别为50、28、16、10mm; 当道面板铺设在双层稳定土基层上时, 采用150kN通行荷载作用, 1 000次通行后铺设道面板4的道面结构的竖向变形仅为16mm, 铺设道面板3、4的道面结构的最大相对车辙分别为36、24mm, 道面板横向连接处易凹陷。可见, 在相同基层条件与通行荷载作用下, 采用3003型铝合金材料构造的道面板1相对采用6A02型铝合金材料构造的道面板2~4更易损坏, 相应的道面结构也更易失效; 道面板2~4铺设在单层稳定土基层上能满足轻型飞机低架次通行要求, 道面板4铺设在双层稳定土基层上能够满足重型飞机的使用要求。
更多>
2015, 15(6): 1-9.
doi:
10.19818/j.cnki.1671-1637.2015.06.001
摘要
(
1262
)
HTML
(
275
)
PDF (1086KB)
(
833
)
引用
(
)
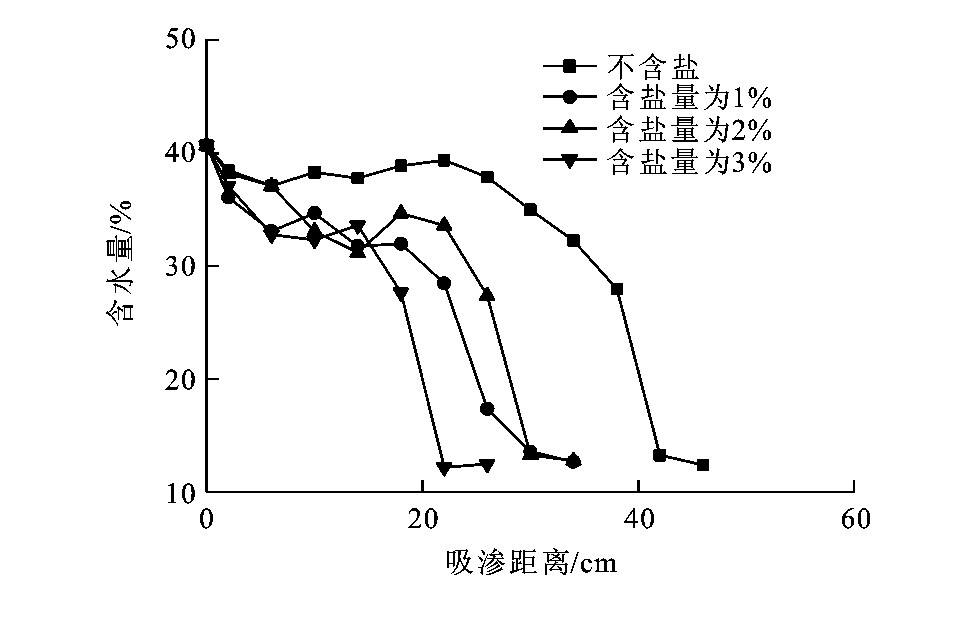
硫酸盐渍土的吸渗化学灌浆处理方法
王乐凡
,
翁兴中
,
张仁义
,
姚志华
,
顾强康
,
李婉
,
李晔
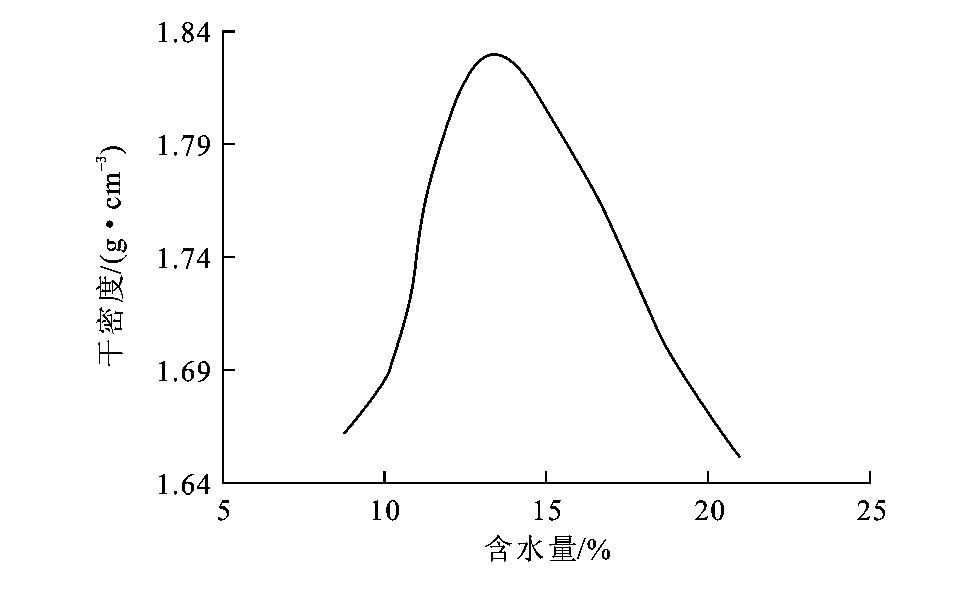
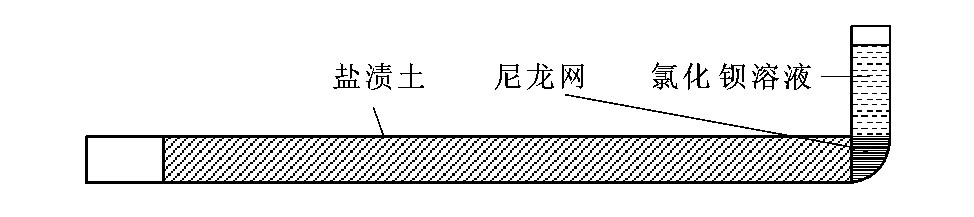
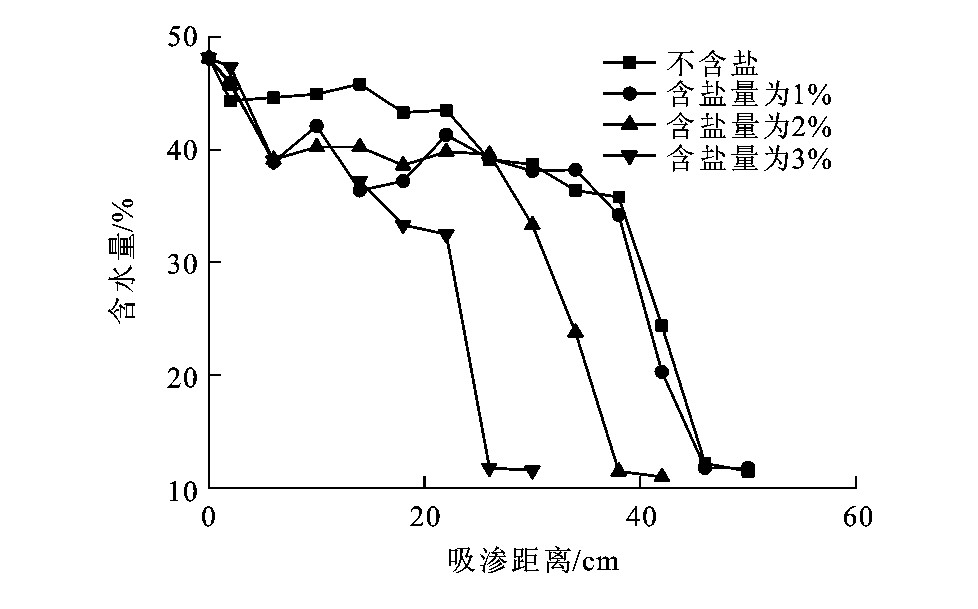
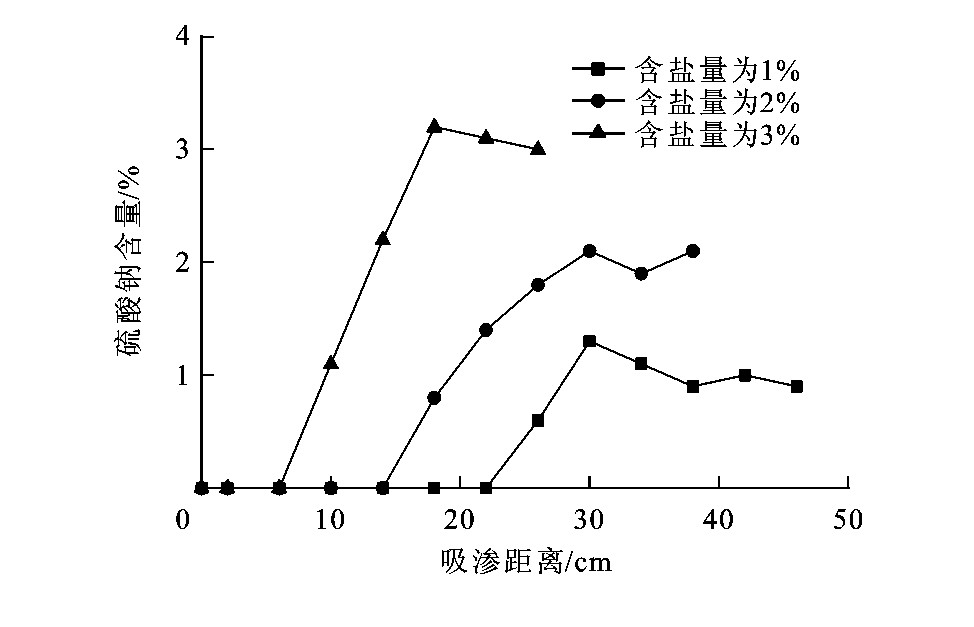
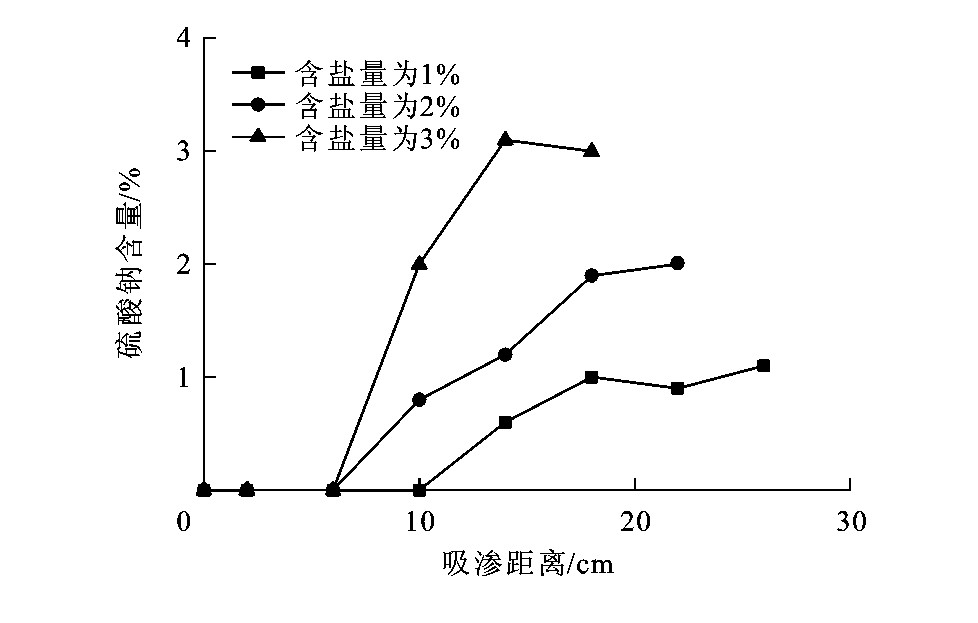
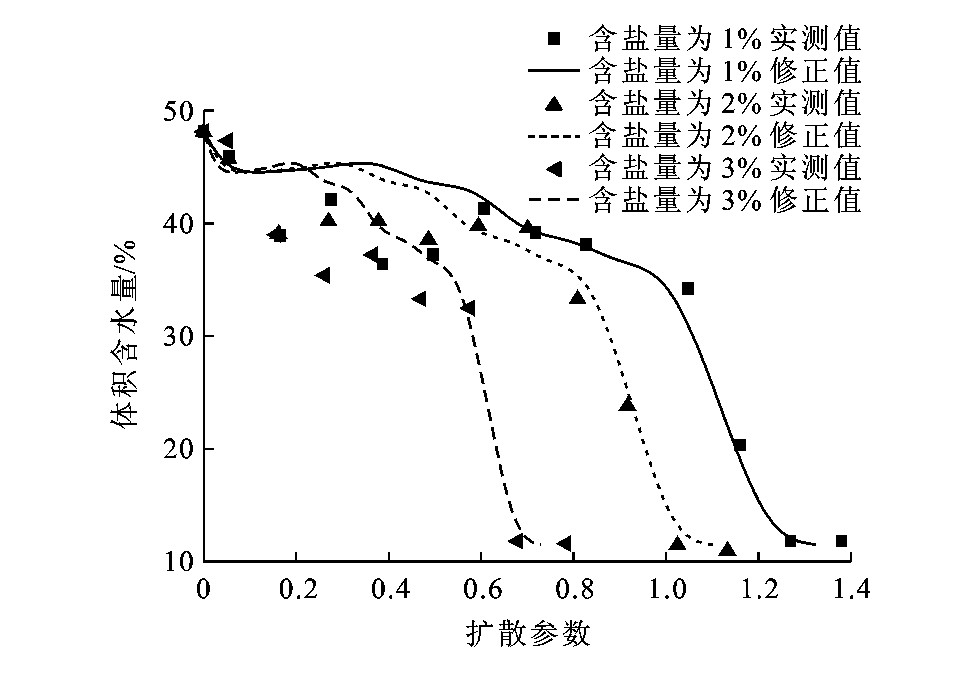
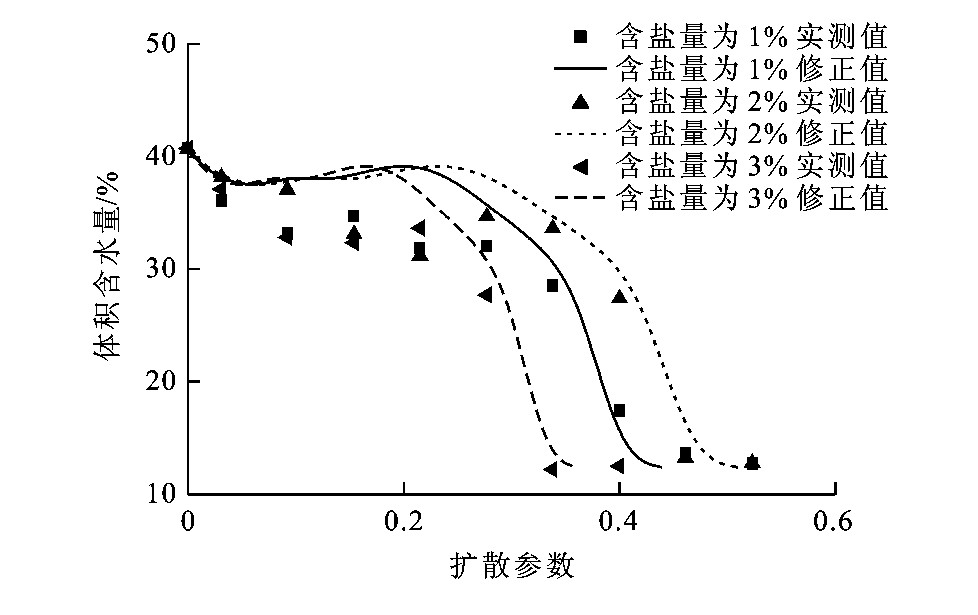
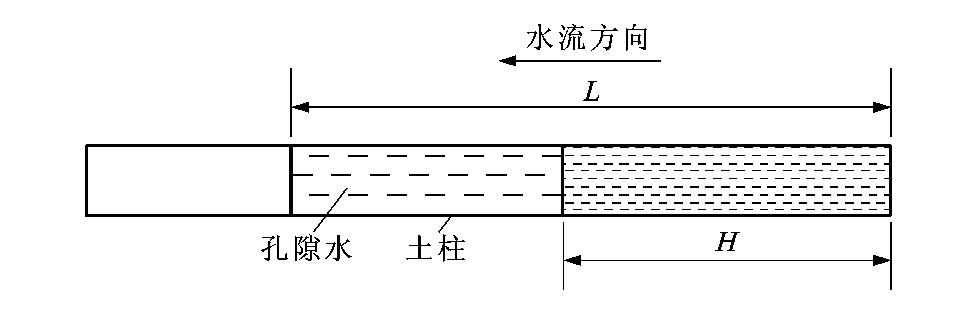
摘要:
选取2种干密度与3种含盐量配比的土样, 分别进行了素土对纯水和盐渍土对氯化钡溶液的吸渗试验, 测试了反应后剩余硫酸钠含量, 得到了采用吸渗灌浆方法处理硫酸盐渍土的完全处理长度。分析了完全处理长度的影响因素, 计算了完全处理长度的修正系数。试验结果表明: 吸渗化学灌浆能够显著降低土样中硫酸钠含量, 当土样干密度为1.4g·cm
-3
, 含盐量分别为1%、2%、3%时, 吸渗氯化钡溶液约22h后, 土样的完全处理长度分别为22、14、6cm; 当土样干密度为1.6g·cm
-3
, 含盐量分别为1%、2%、3%时, 吸渗氯化钡溶液约70h后, 土样的完全处理长度分别为10、6、6cm, 故土样的干密度越小, 含盐量越低, 吸渗化学灌浆处理效果越好, 完全处理长度越长。完全处理长度会受到浸湿长度、氯化钡溶液浓度、土样含盐量与含水量增量的影响, 计算得到完全处理长度的修正系数为0.53。
更多>
2015, 15(6): 10-16.
doi:
10.19818/j.cnki.1671-1637.2015.06.002
摘要
(
782
)
HTML
(
161
)
PDF (1418KB)
(
648
)
引用
(
)
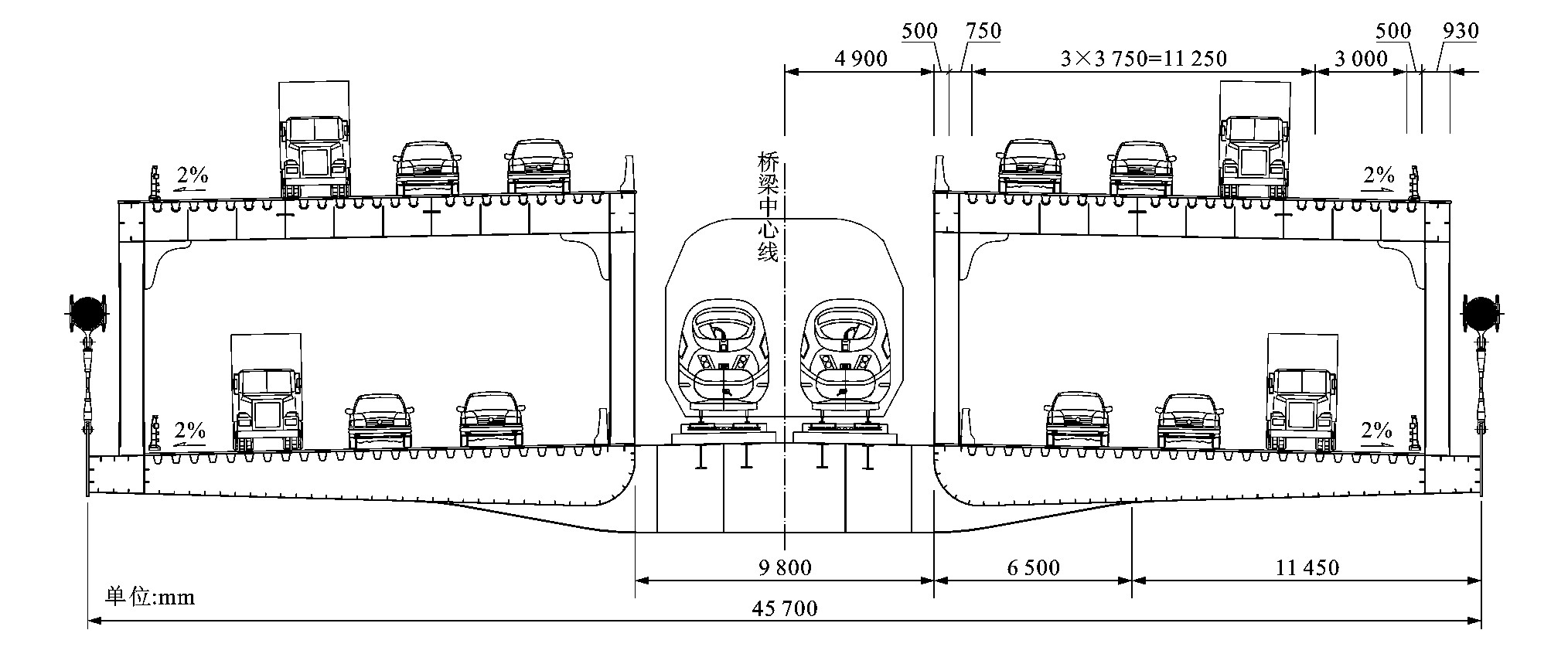
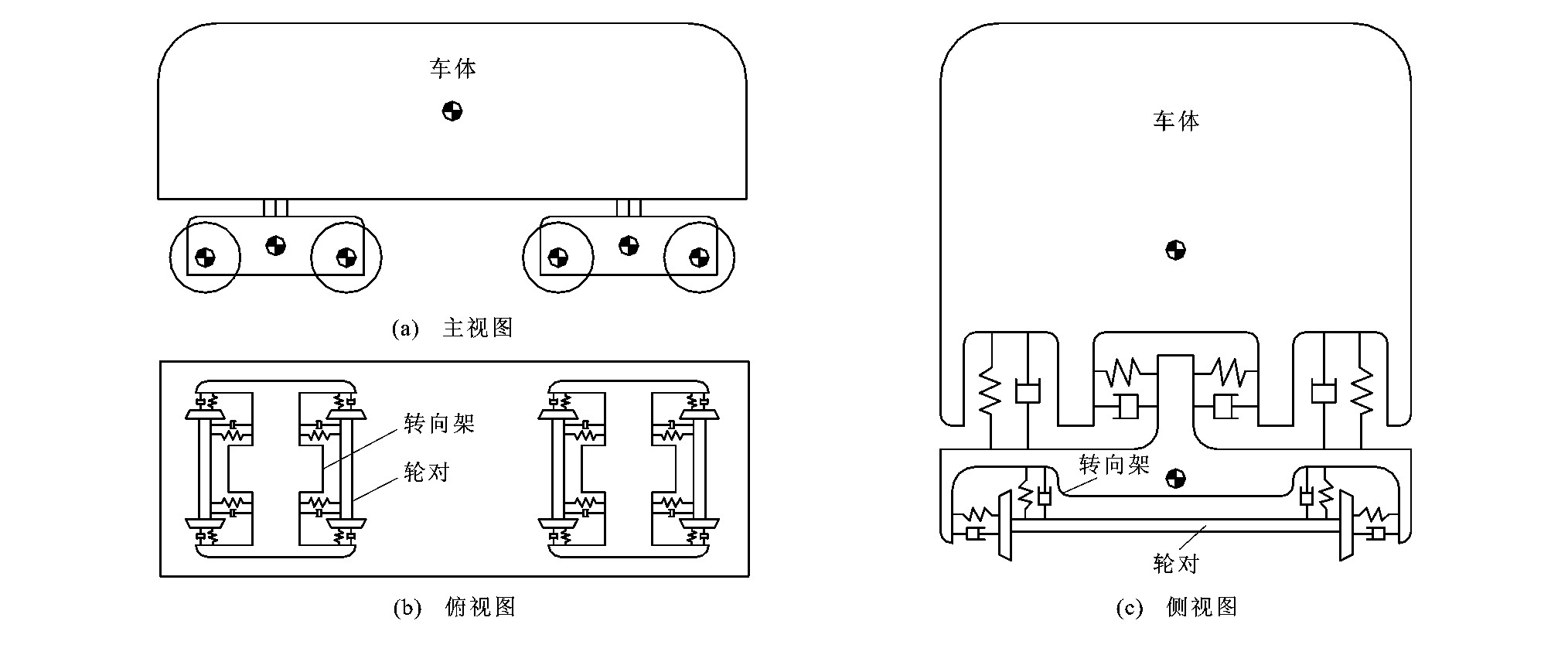
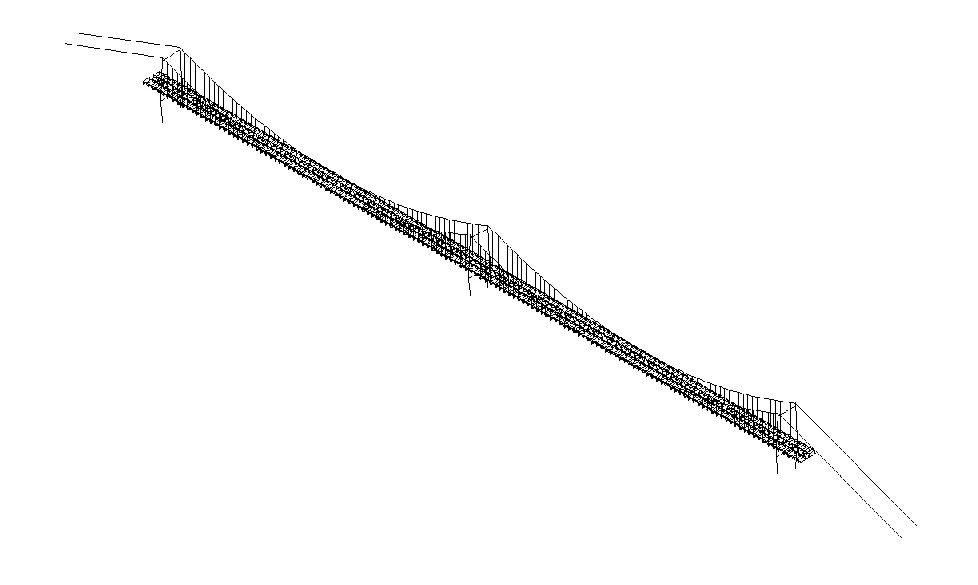
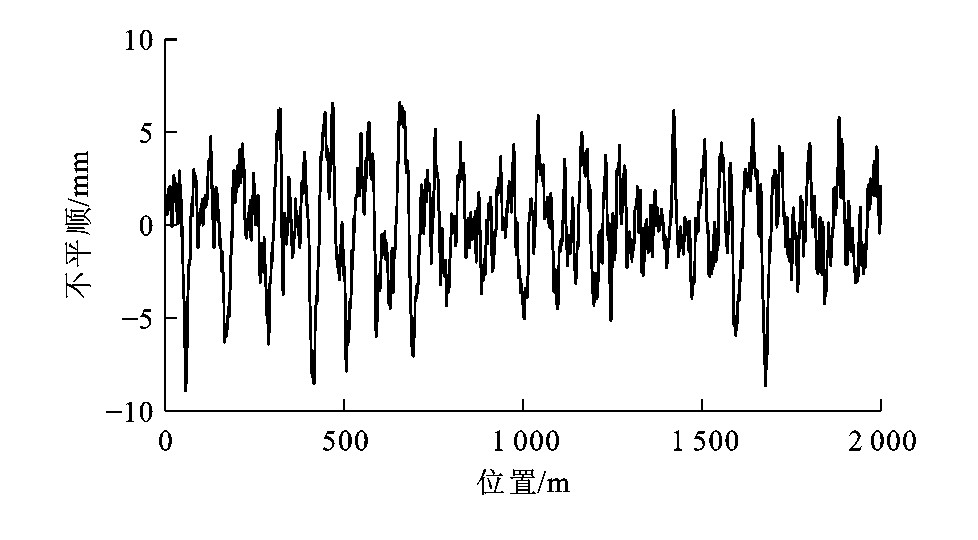
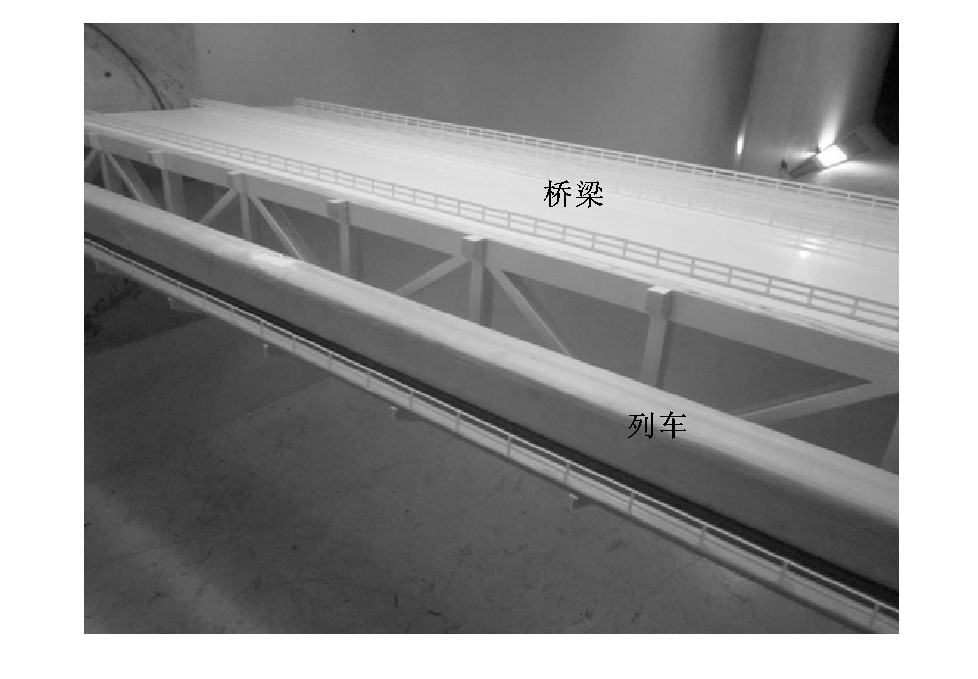
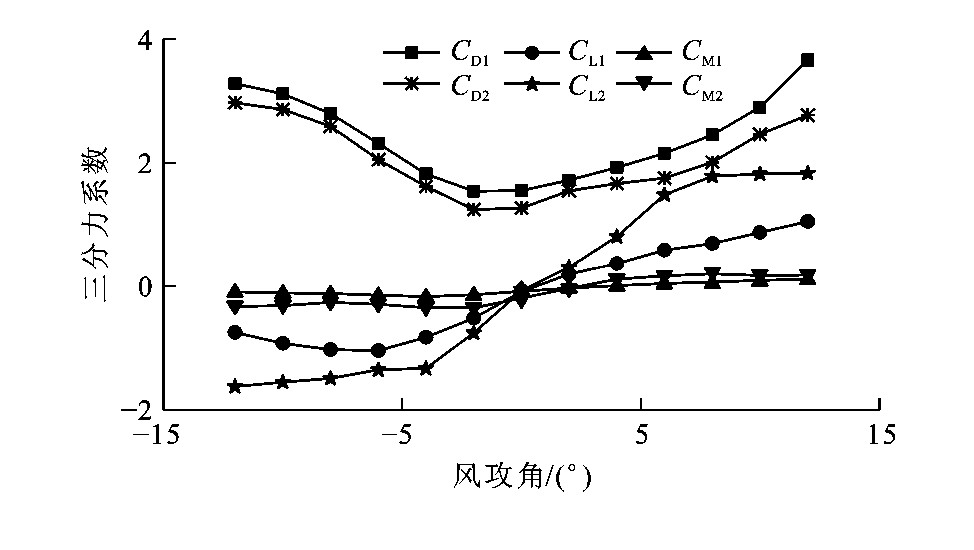
三线合一、三塔悬索桥风-车-桥耦合振动性能对比
李永乐
,
徐昕宇
,
严乃杰
,
邓江涛
,
向活跃
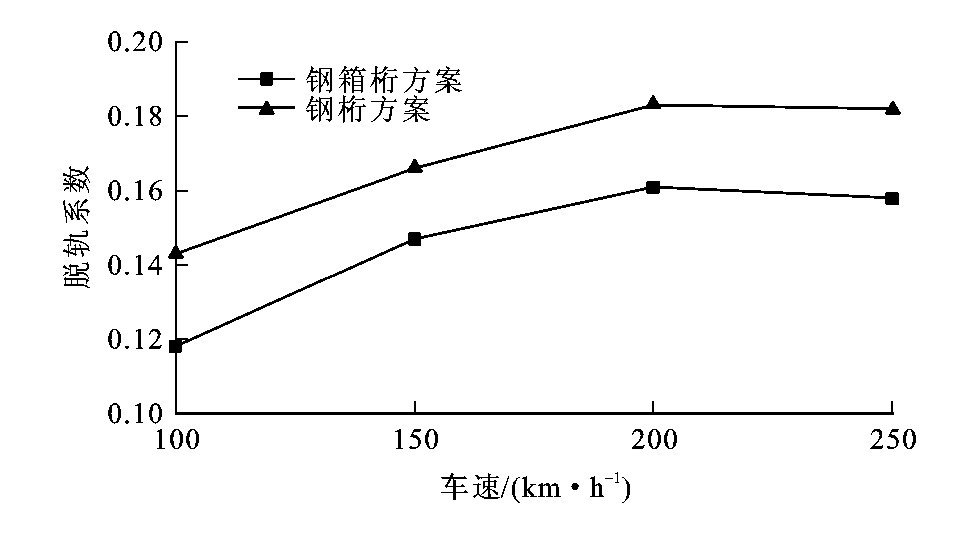
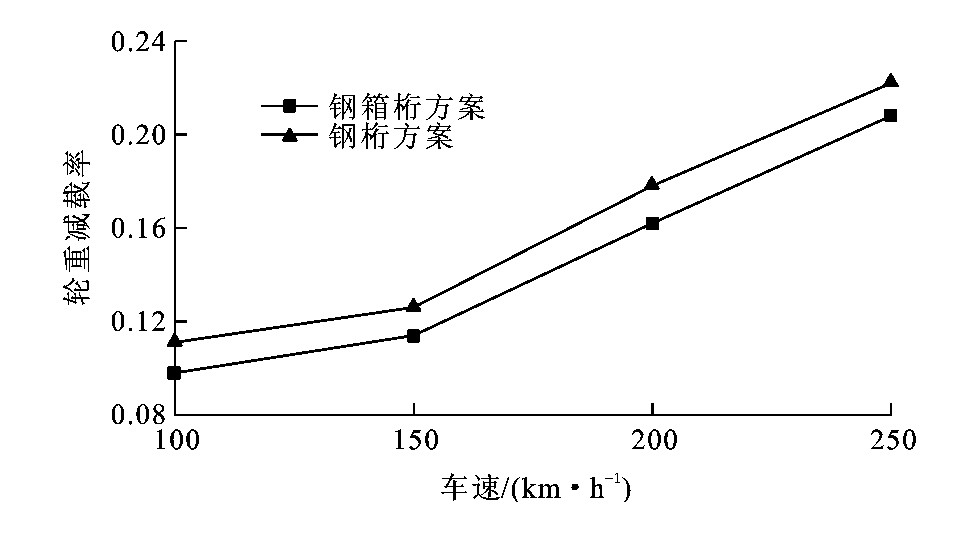
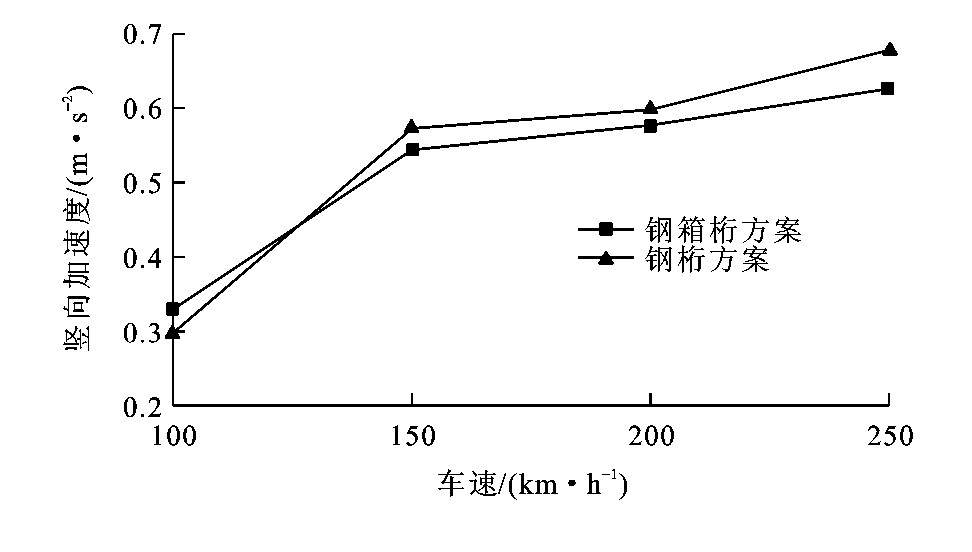
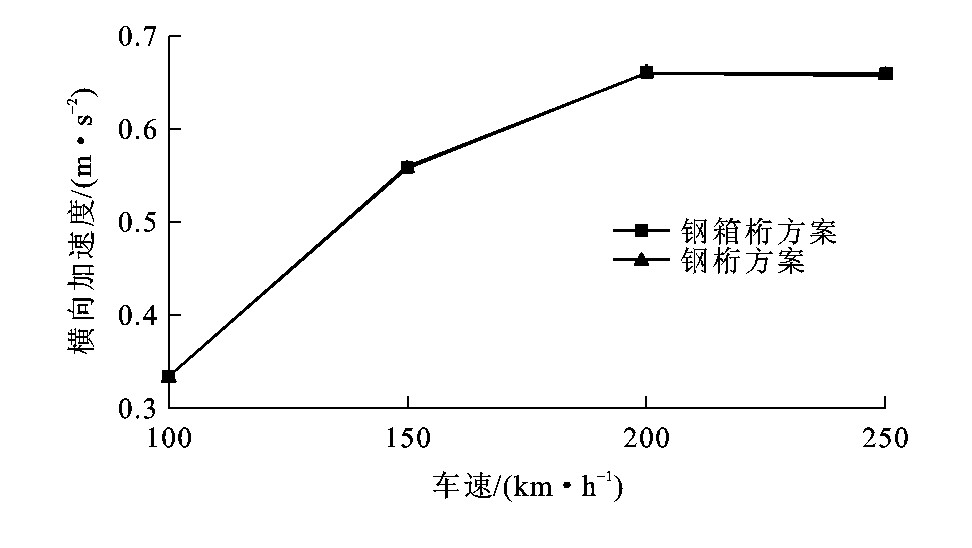
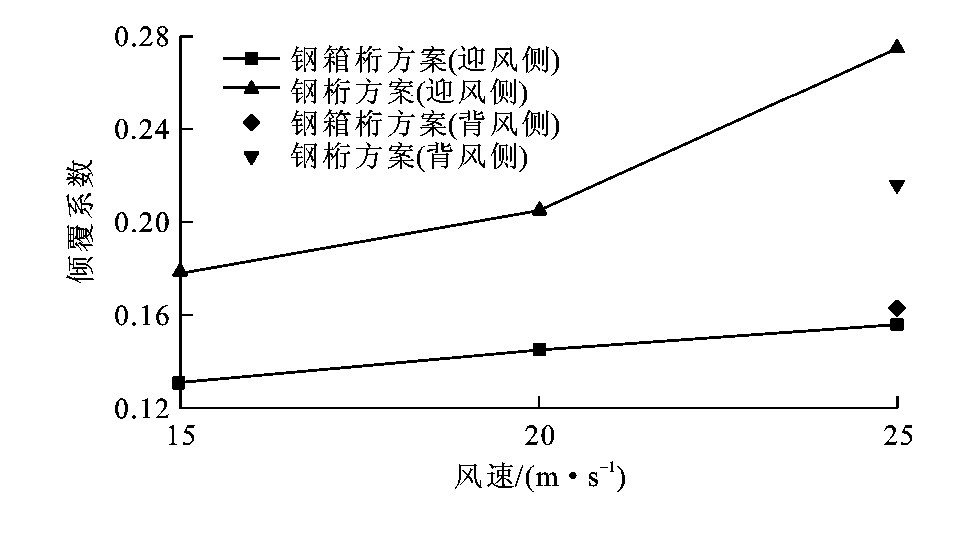
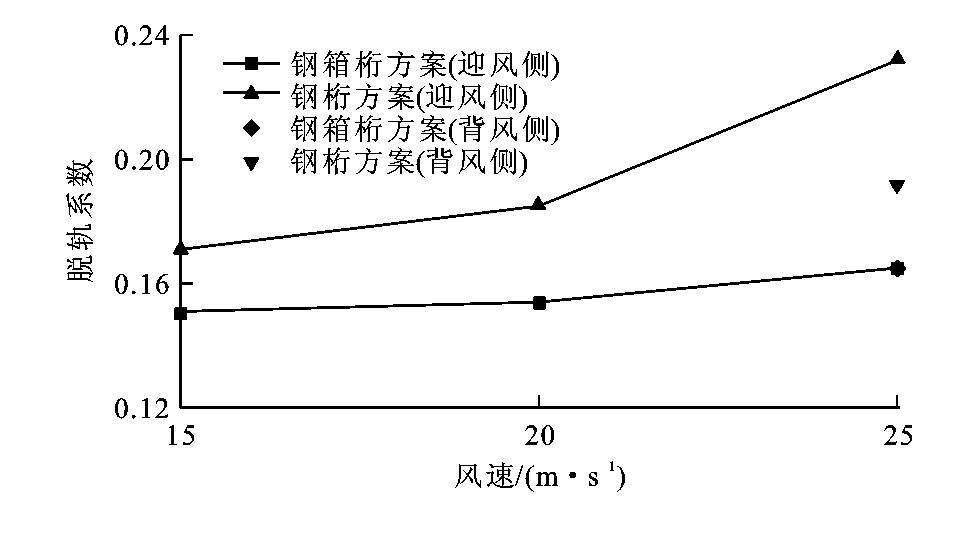
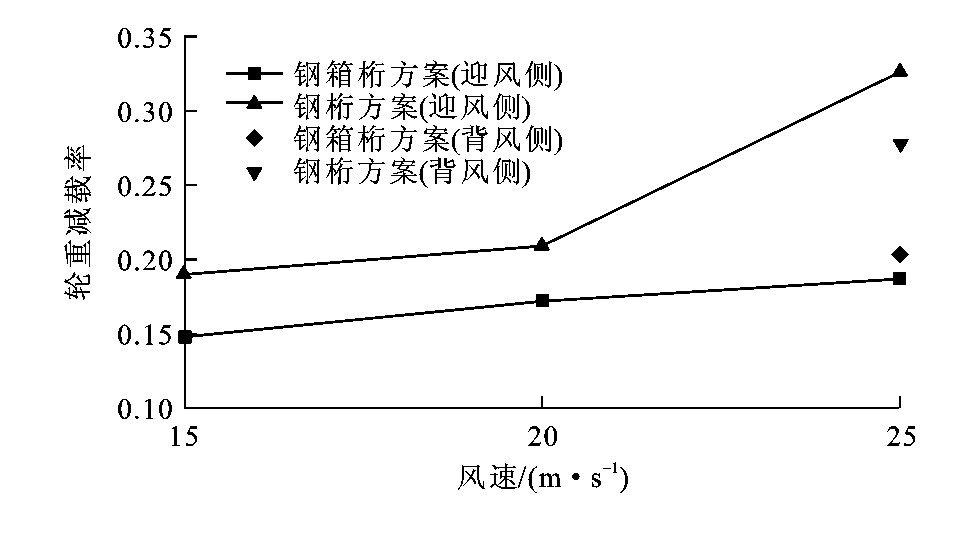
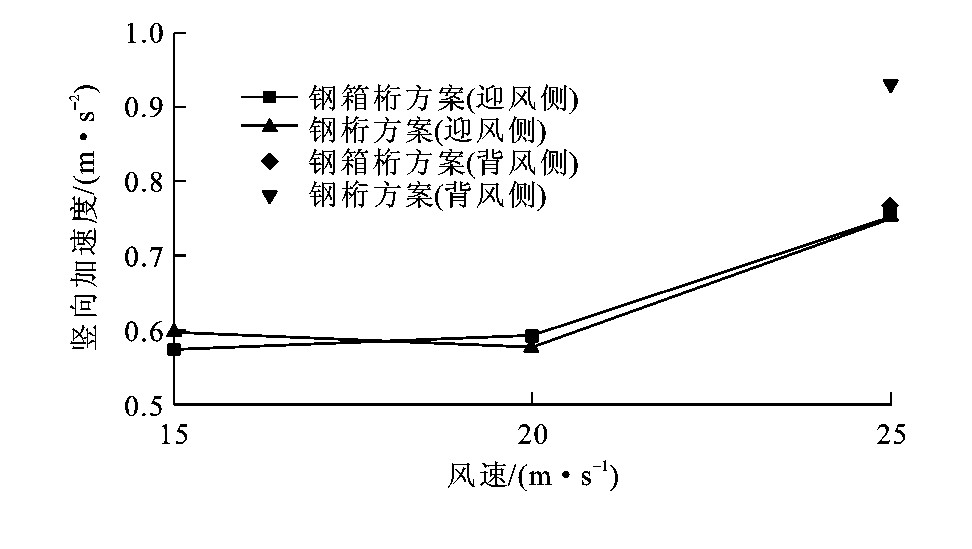
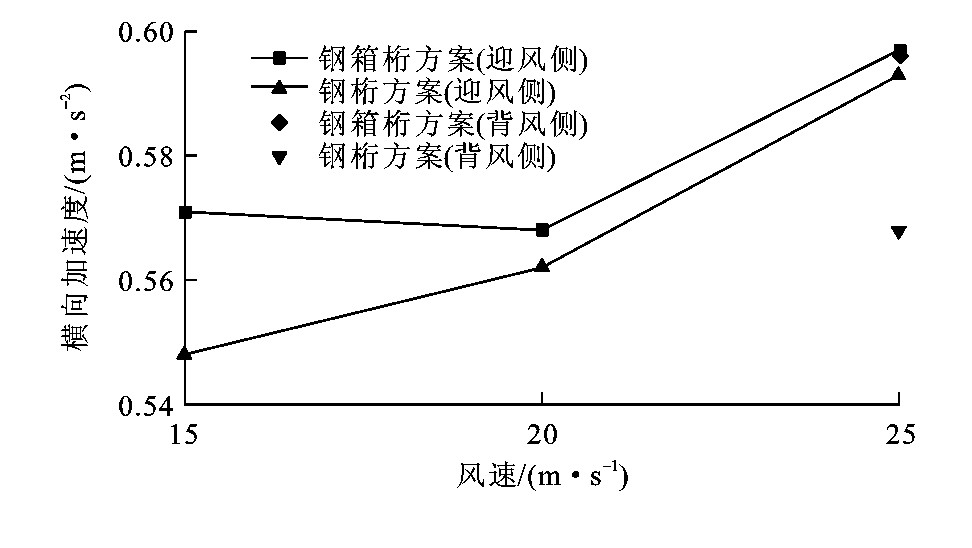
摘要:
以某三线合一、三塔悬索桥的2种设计方案(钢箱桁和钢桁方案)为工程背景, 通过车桥系统节段模型风洞试验, 测试了车辆和桥梁的三分力系数, 并基于风-车-桥系统空间耦合动力学模型, 采用自主研发的桥梁分析软件BANSYS, 对比分析了该桥的结构动力特性与风-车-桥耦合振动性能。分析结果表明: 三线合一、三塔悬索桥结构自振频率较低; 车辆气动力受轨道位置的影响较大, 钢桁方案迎风侧车辆阻力系数约为钢箱桁方案的2.2倍; 当风速为0时, 桥梁、车辆的动力响应总体上是随车速的增大而增大, 在同一车速下, 钢桁方案的桥梁位移较钢箱桁方案大, 主要是由于钢桁方案的桥梁整体刚度略弱于钢箱桁方案; 当考虑风速影响时, 桥梁的横向响应随风速的增大而显著增大; 车辆位于迎风侧, 风速为25m·s
-1
时, 钢箱桁方案和钢桁方案的桥梁横向位移约分别为风速为15m·s
-1
时的位移的2.4倍和3.8倍, 横风对桥梁的横向响应起主导作用; 同一风速时钢桁方案的桥梁响应总体上较钢箱桁方案大; 同一方案时车辆响应随风速的增大而增大, 当风速达到25m·s
-1
时, 车辆动力响应显著增加, 相比15m·s
-1
时最大增加幅度为71.6%。
更多>
2015, 15(6): 17-25.
doi:
10.19818/j.cnki.1671-1637.2015.06.003
摘要
(
791
)
HTML
(
171
)
PDF (883KB)
(
598
)
引用
(
)
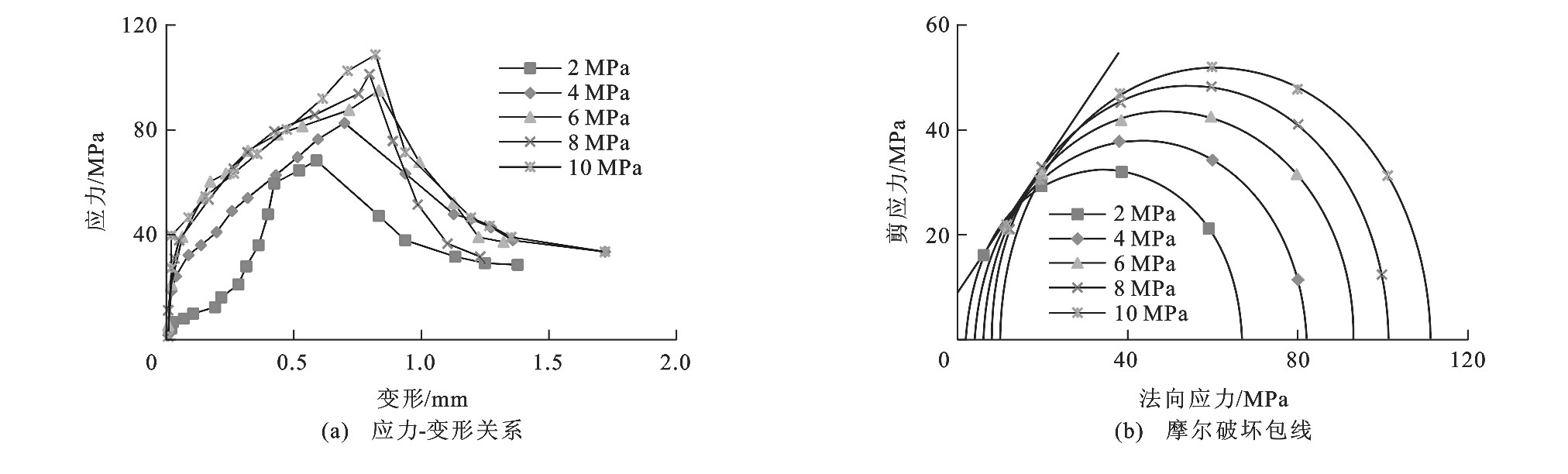
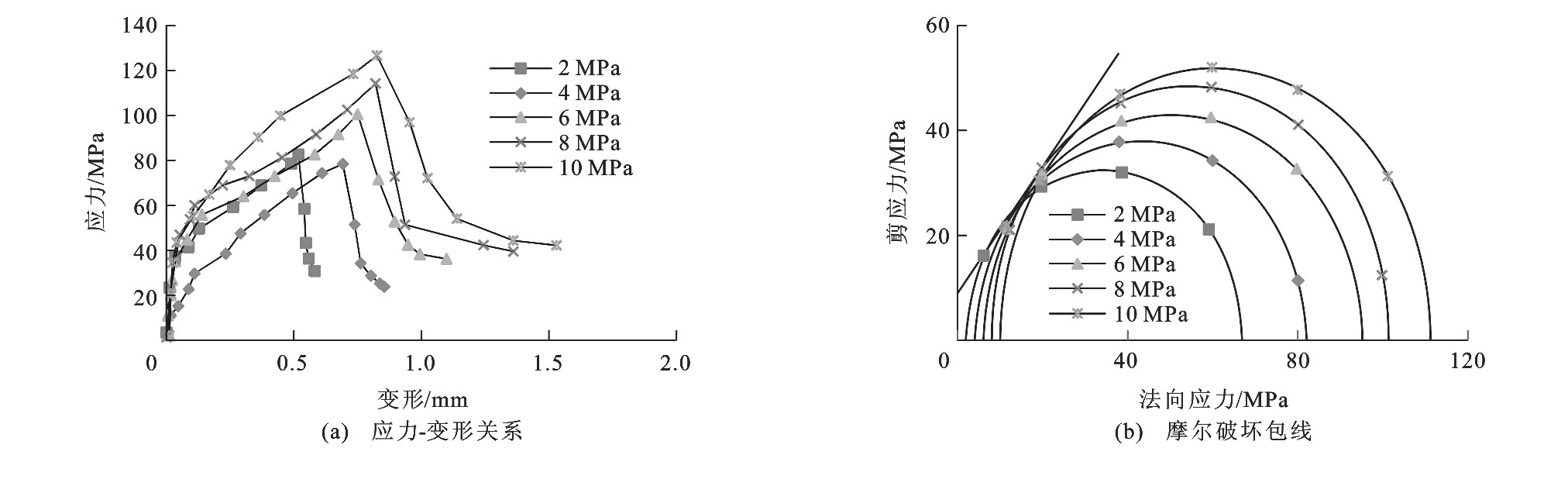
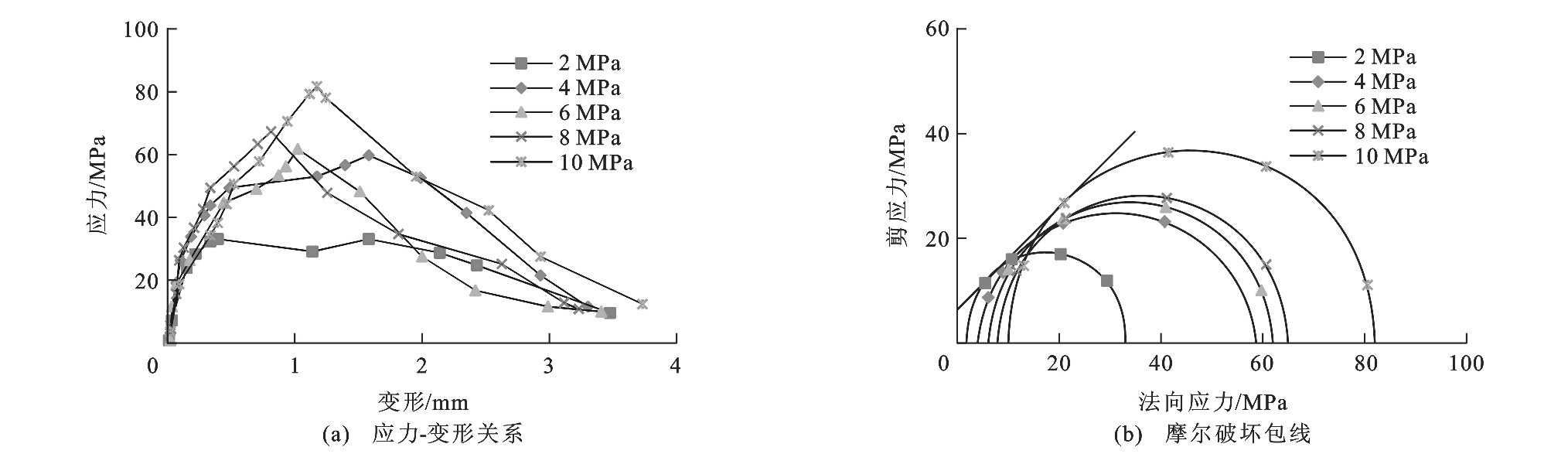
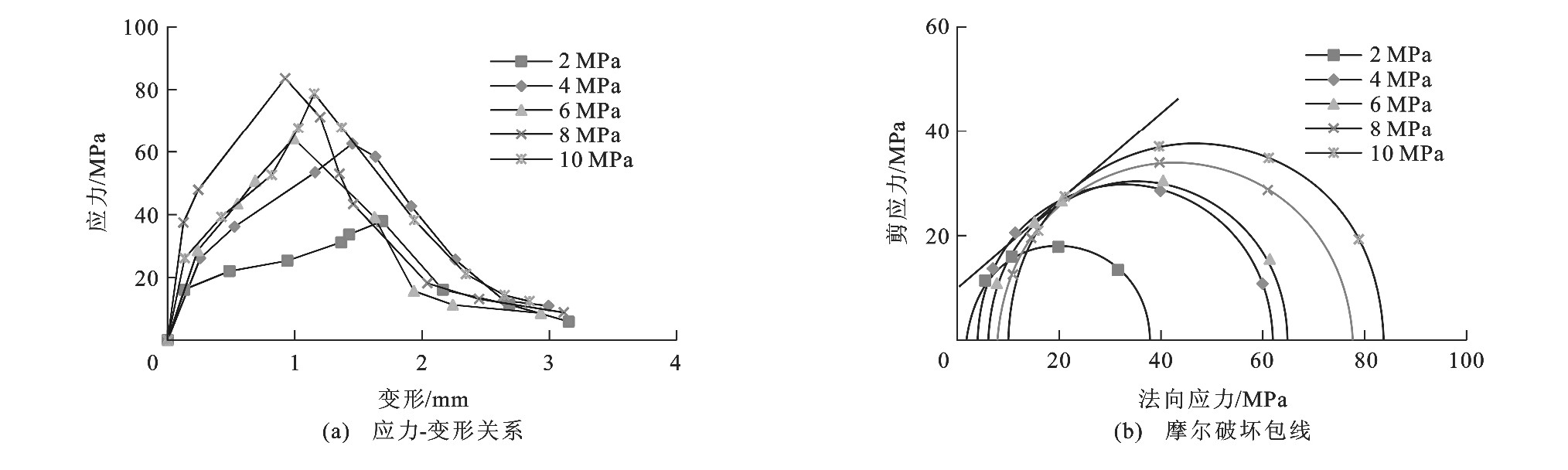
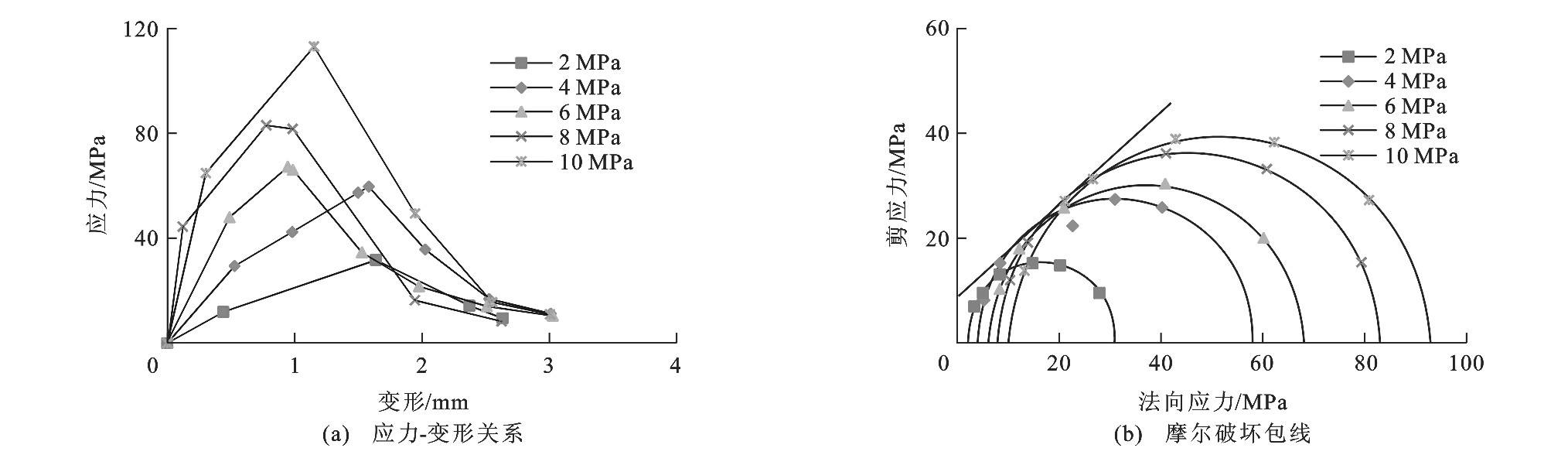
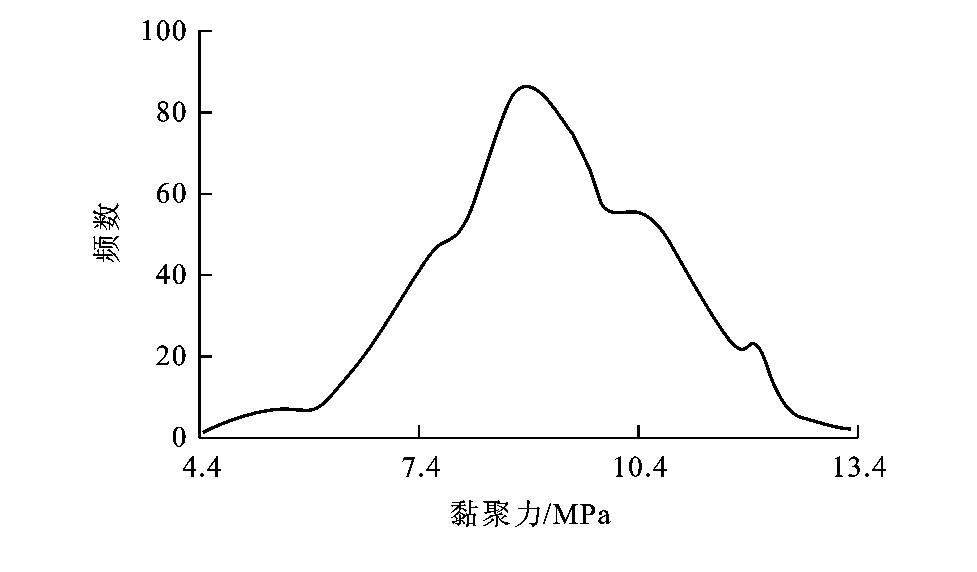
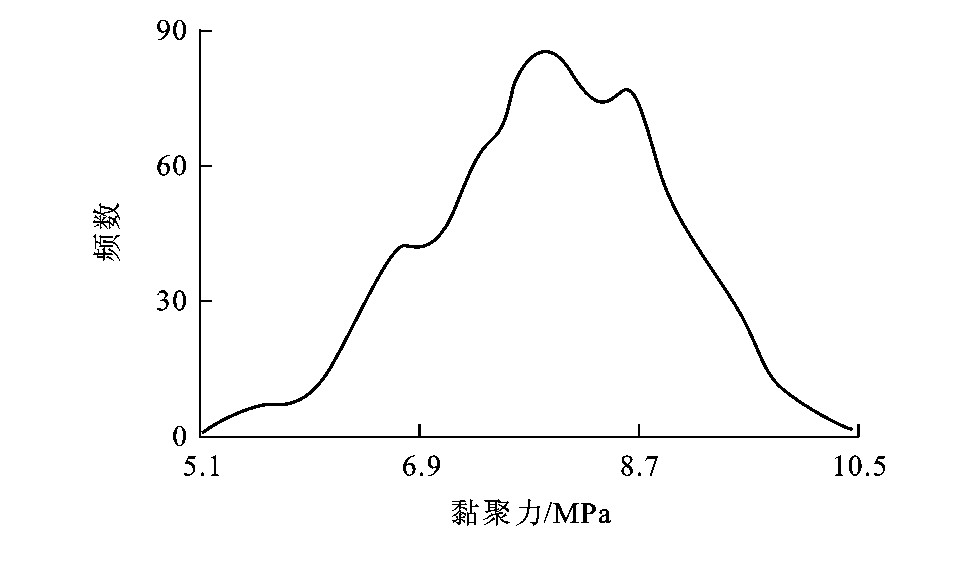
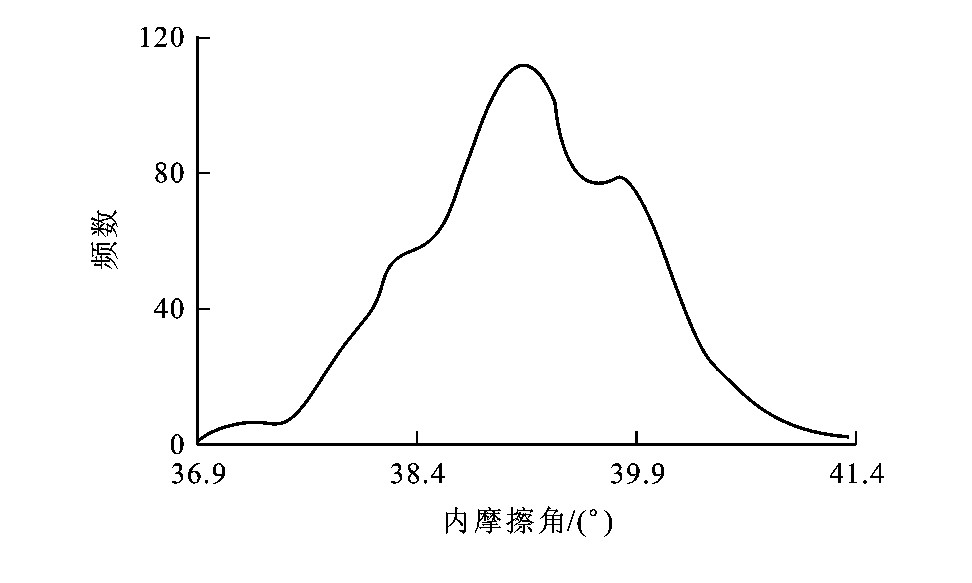
岩质岸坡岩样力学参数取值方法比较
周志军
,
张兴明
,
冯佳佳
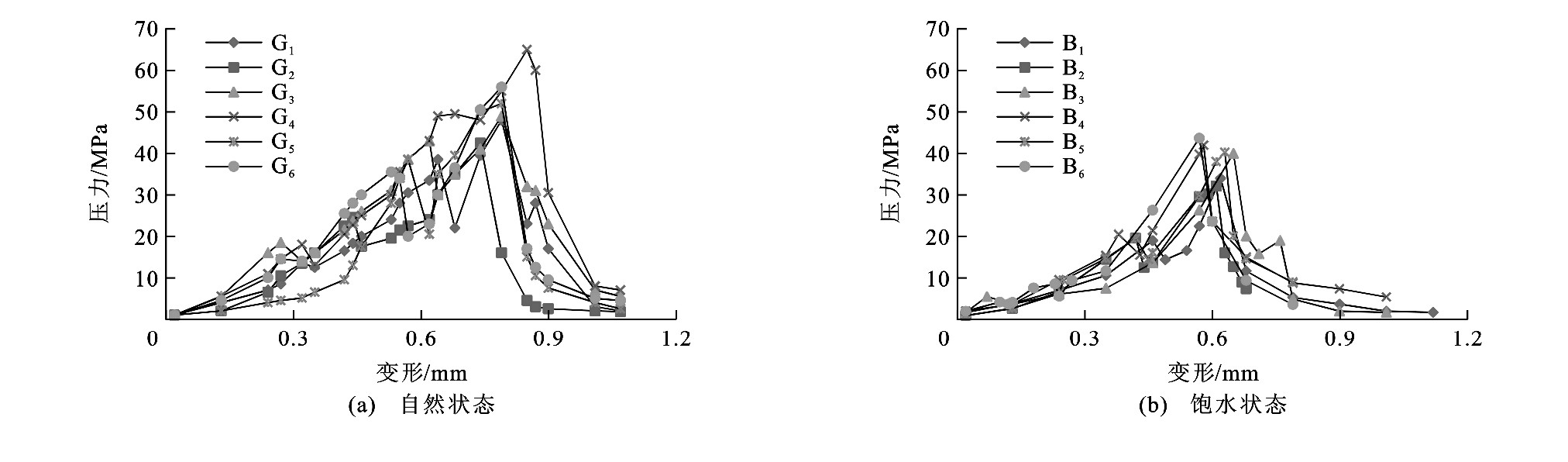
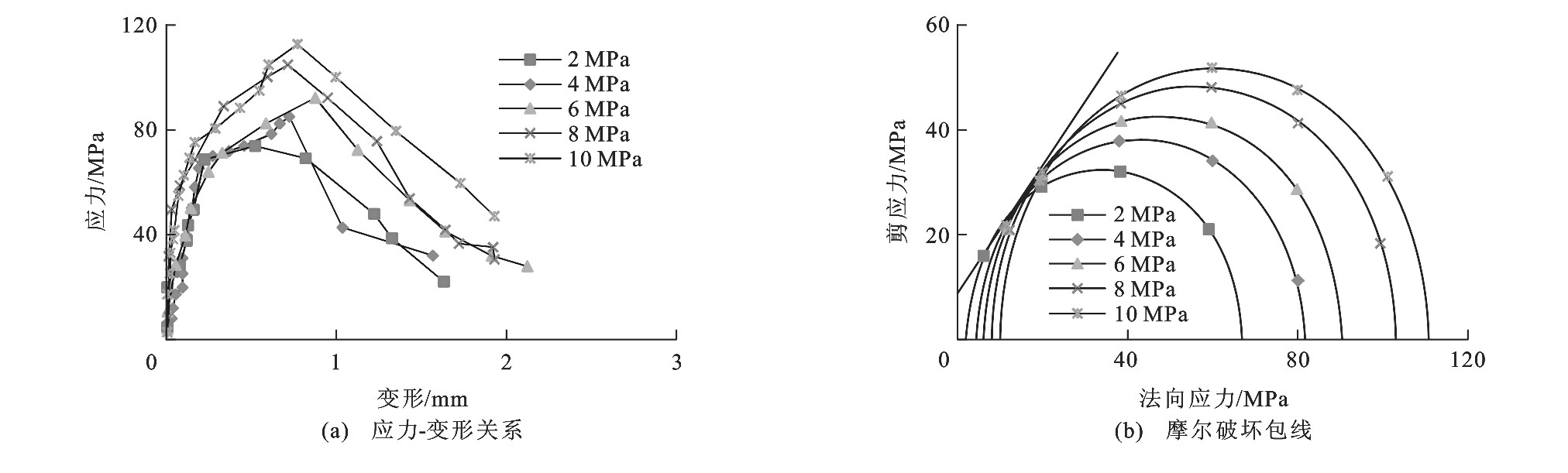
摘要:
针对安川公路典型岸坡岩石试样, 分别在天然状态和饱水状态下对其进行轴压试验, 采用随机模糊法、最小二乘法和蒙特卡罗法对岩石变形参数和抗剪强度参数进行抽样取值, 并计算了相应的边坡稳定性系数。计算结果表明: 采用蒙特卡罗法抽样得到的变形参数均值、均方差与变异系数与最小二乘法基本接近, 其中均值相差仅为0.77%;采用随机模糊法抽样得到的变形参数均值、均方差与变异系数最小, 其均值较最小二乘法降低了8.60%;在抗剪强度参数抽样取值时, 利用随机模糊法得到的抗剪强度参数均值、变异系数与对应的边坡安全系数最小, 蒙特卡罗法次之, 最小二乘法最大, 其中采用随机模糊法抽样取值时边坡安全系数均值为1.243, 蒙特卡罗法取值时为1.521。相比于蒙特卡罗法, 采用随机模糊法确定的隶属度函数考虑了样本参数权重因素的影响, 反映了岸坡岩石抗剪强度参数的不确定性, 计算的岩质边坡安全系数更具有工程指导意义。
更多>
2015, 15(6): 26-34.
doi:
10.19818/j.cnki.1671-1637.2015.06.004
摘要
(
658
)
HTML
(
100
)
PDF (2428KB)
(
568
)
引用
(
)
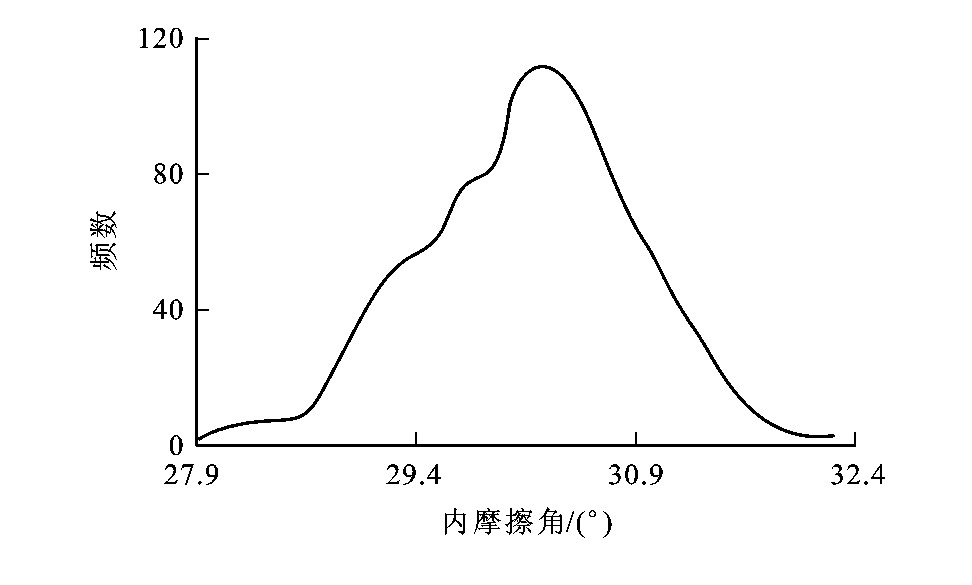
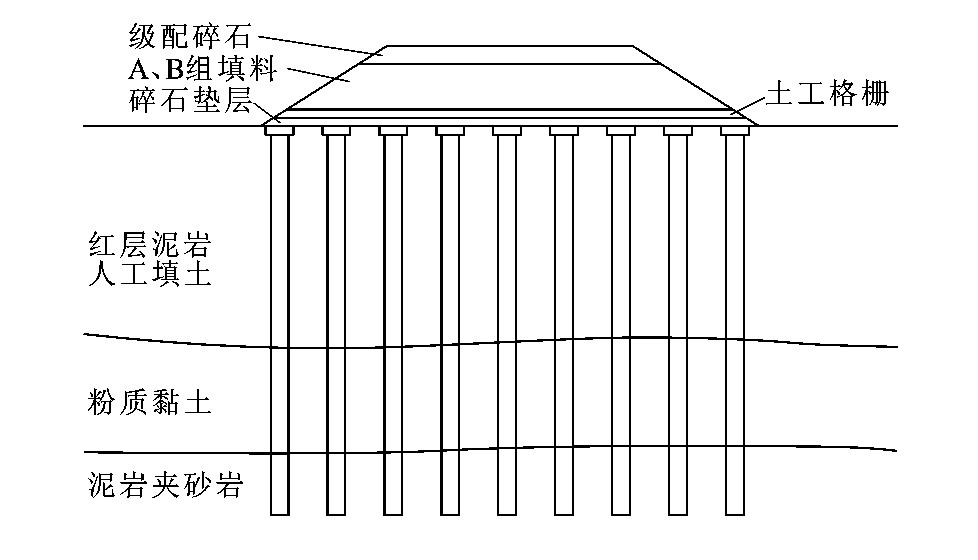
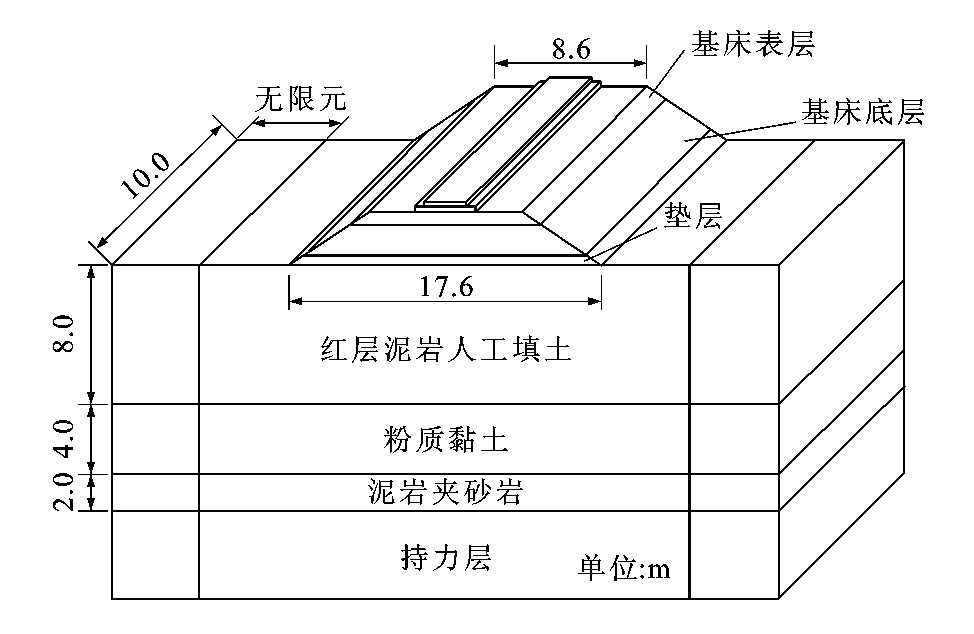
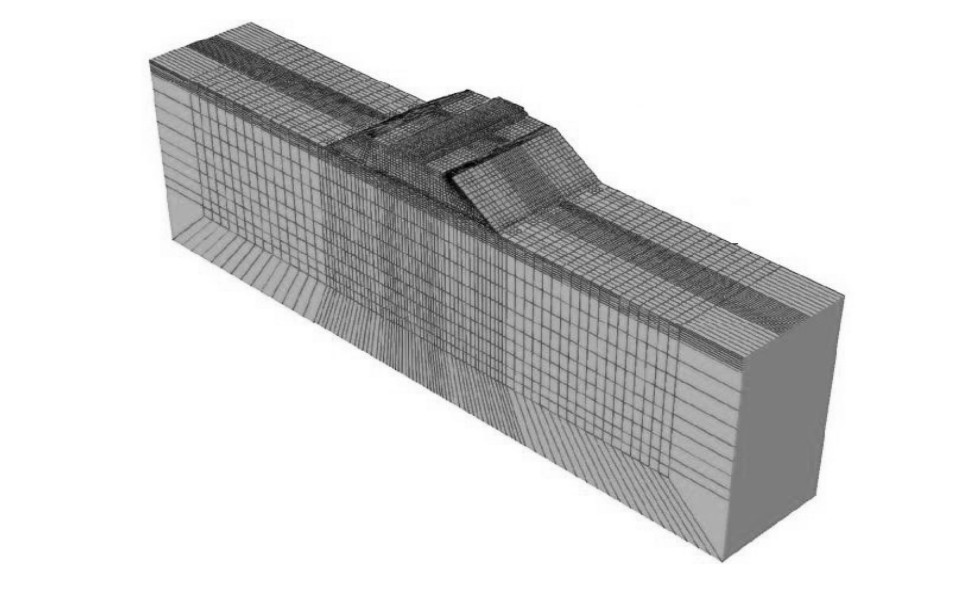
列车荷载下的桩网结构低路基土拱效应
魏静
,
魏平
,
杨松林
,
张栋
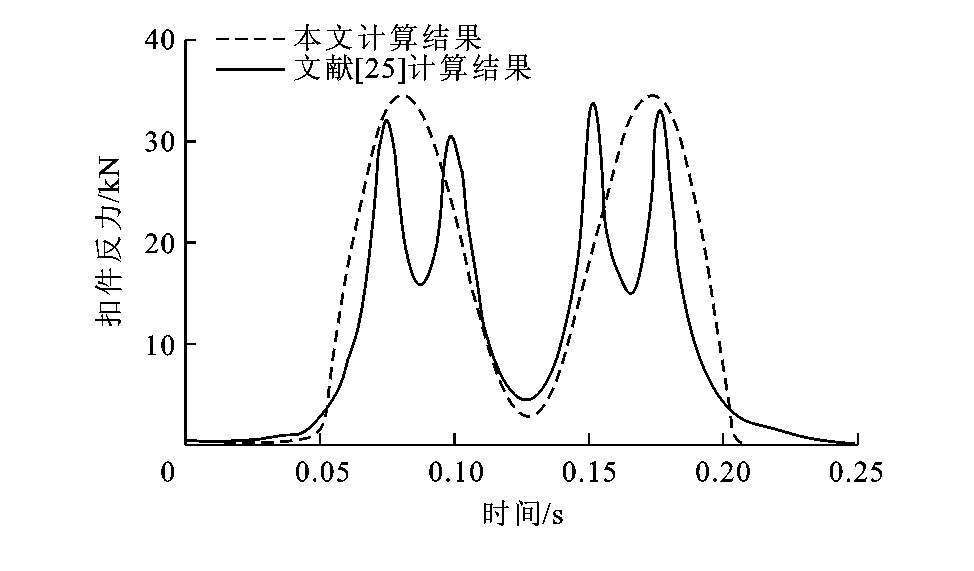
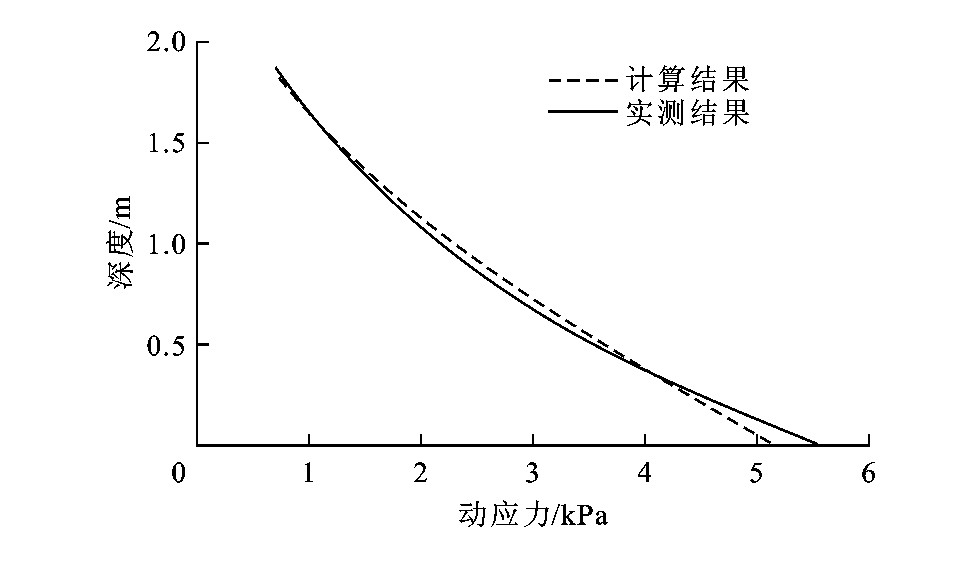
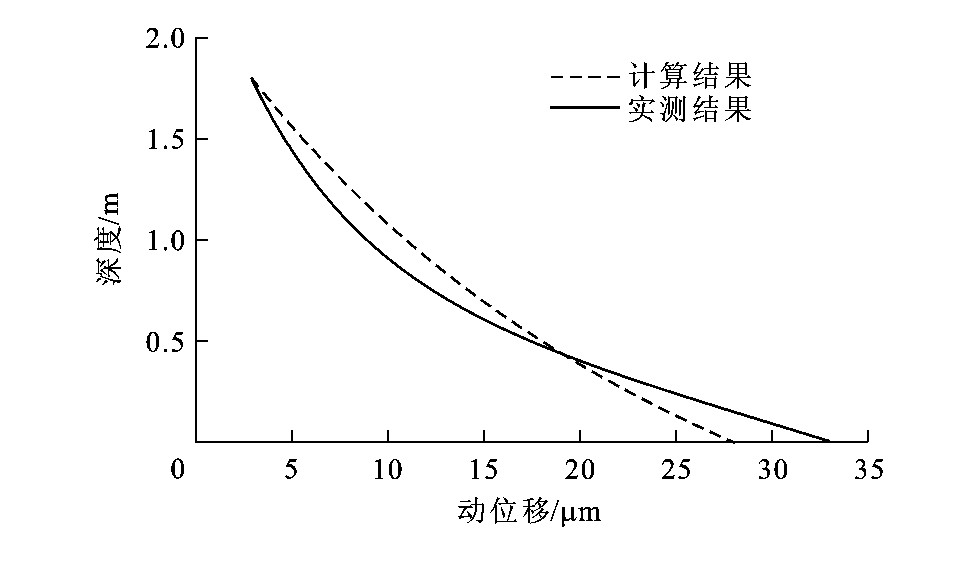
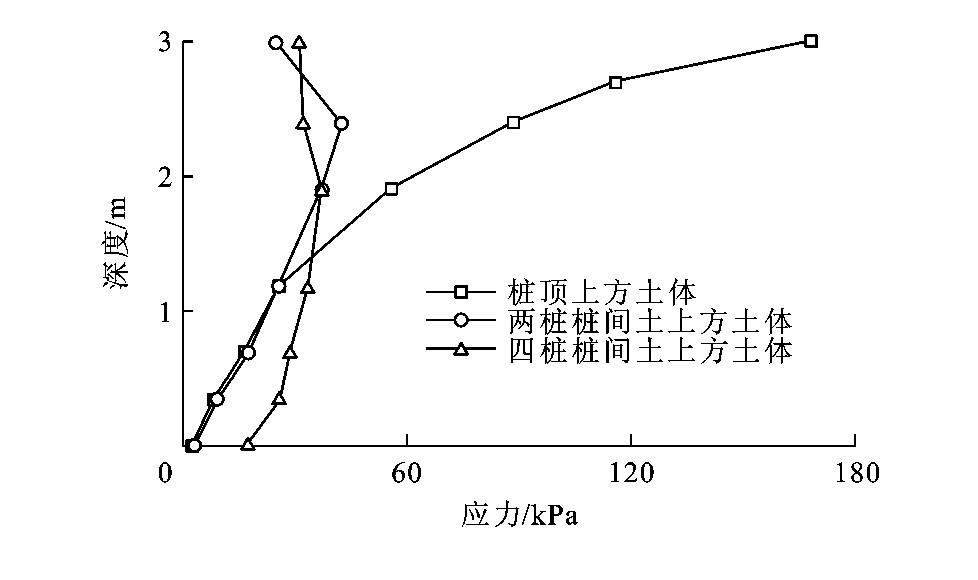
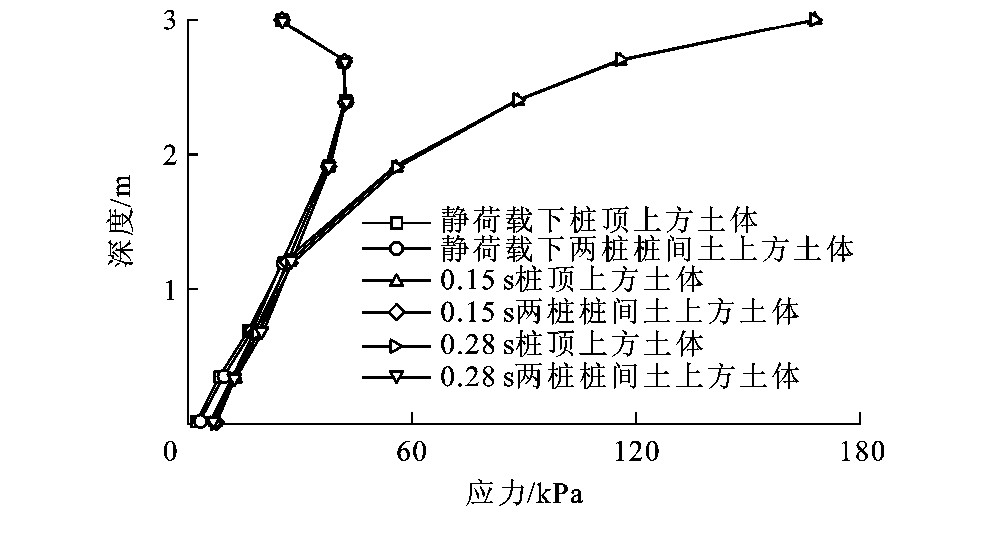
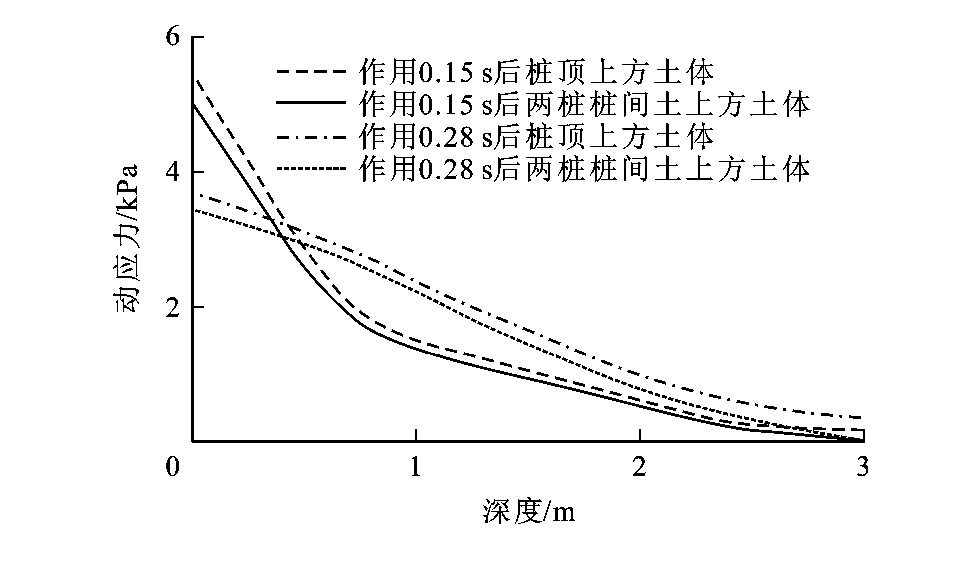
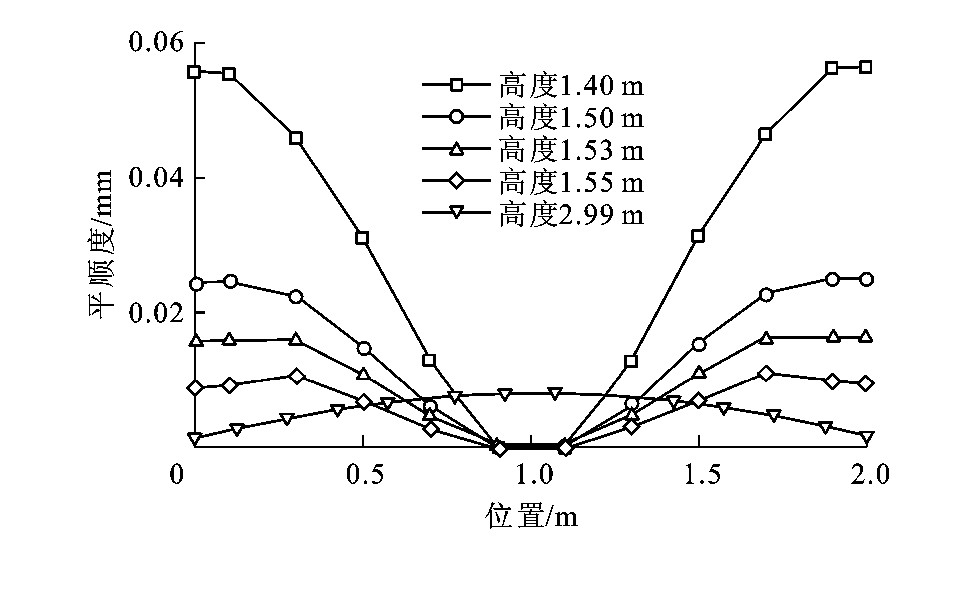
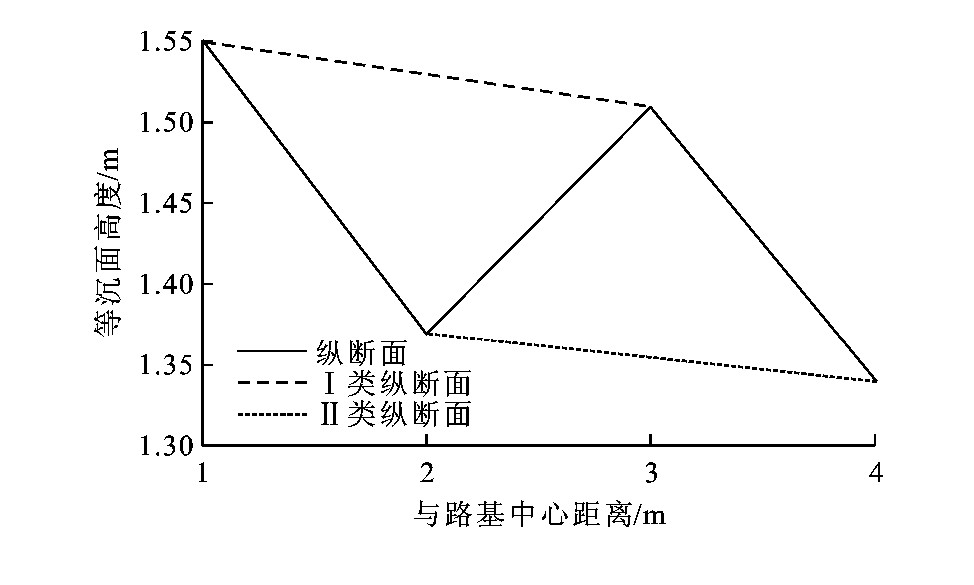
摘要:
运用ABAQUS软件建立了桩网结构低路基动力有限元模型, 通过计算结果与实测结果的对比验证了模型的可靠性, 并分析了列车荷载下路基中动应力分布、桩土应力比与等沉面高度变化特征。分析结果表明: 采用模型计算的路基不同深度处动应力与实测结果最大差值为0.56kPa, 动位移的最大差值为7μm, 计算和实测的平均动应力和动位移沿路基深度的传递趋势相同, 因此, 有限元模型可靠; 在动荷载作用下, 路基中存在土拱效应, 土拱高度约为1.6m, 与静荷载作用下土拱高度近似, 路基表面的应力变化率比路基基底大; 路基中动应力的分布受到土拱效应的影响, 表现为传递到桩间土上方土体的动应力部分转移至桩顶上方, 且在路基垫层附近动应力转移现象最明显; 在动荷载作用后, 路基中心处桩顶与两桩间的桩土应力比减小, 而桩顶与四桩间的桩土应力比增大, 桩顶与两桩间的桩土应力比始终大于桩顶与四桩间的桩土应力比; 距离路基中心1m处纵断面等沉面高度为1.55m, 布置桩体的纵断面等沉面高度大于未布置桩体的纵断面等沉面高度, 且沿路基中心到路肩, 同类纵断面的等沉面高度逐渐降低, 动荷载作用后, 路基中心处等沉面高度增大。
更多>
2015, 15(6): 35-44.
doi:
10.19818/j.cnki.1671-1637.2015.06.005
摘要
(
797
)
HTML
(
149
)
PDF (755KB)
(
787
)
引用
(
)
载运工具运用工程
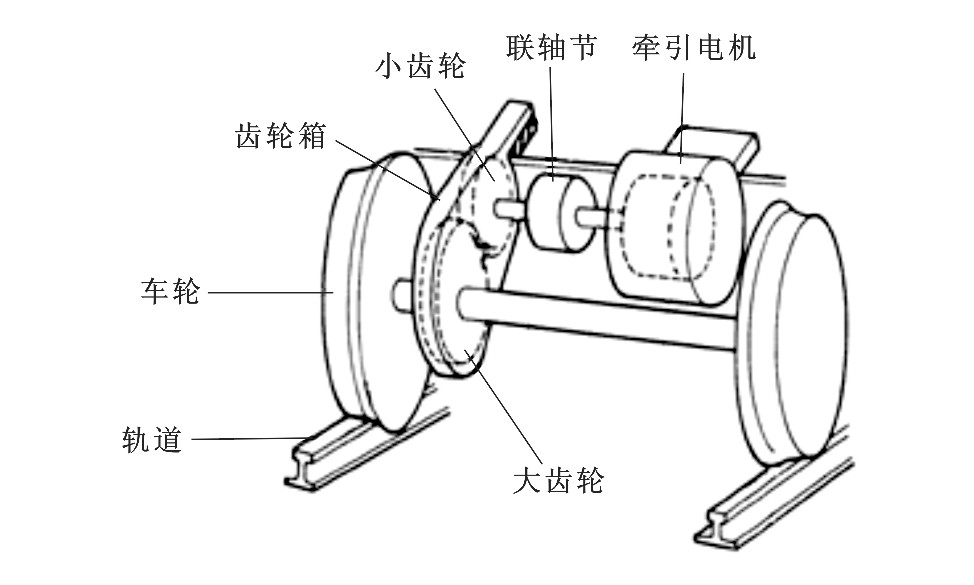
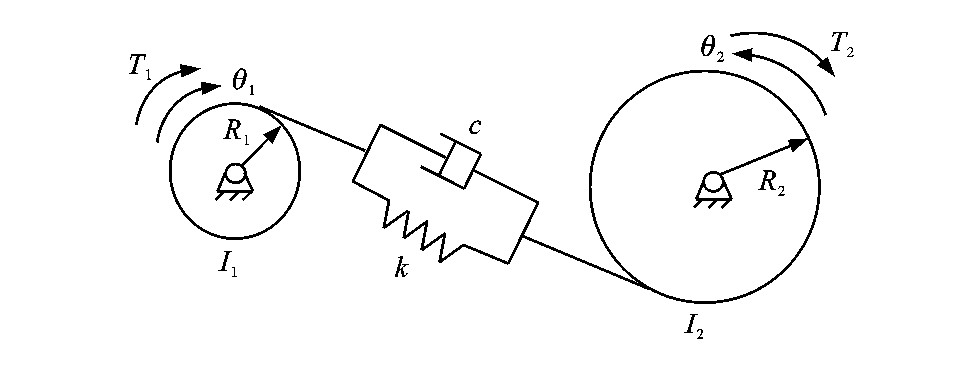
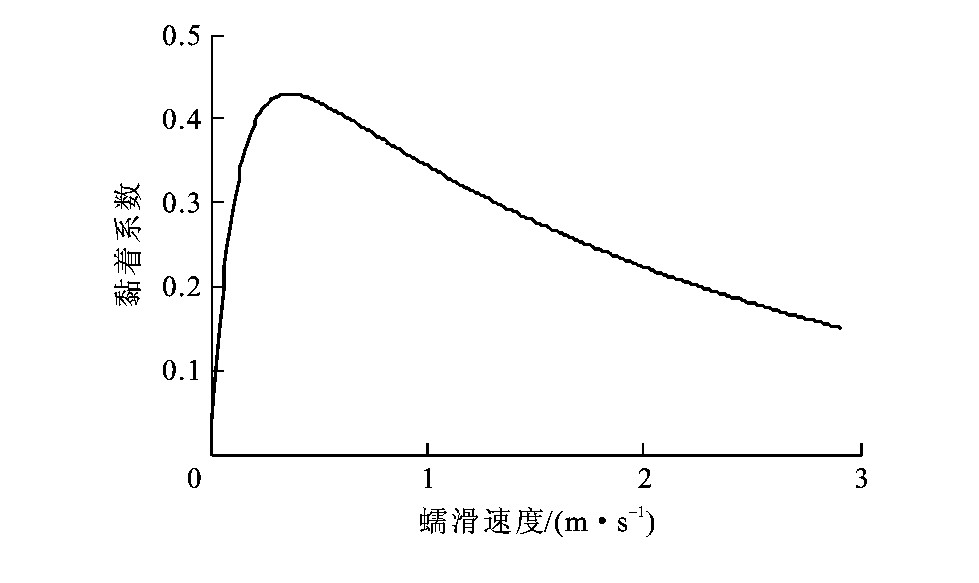
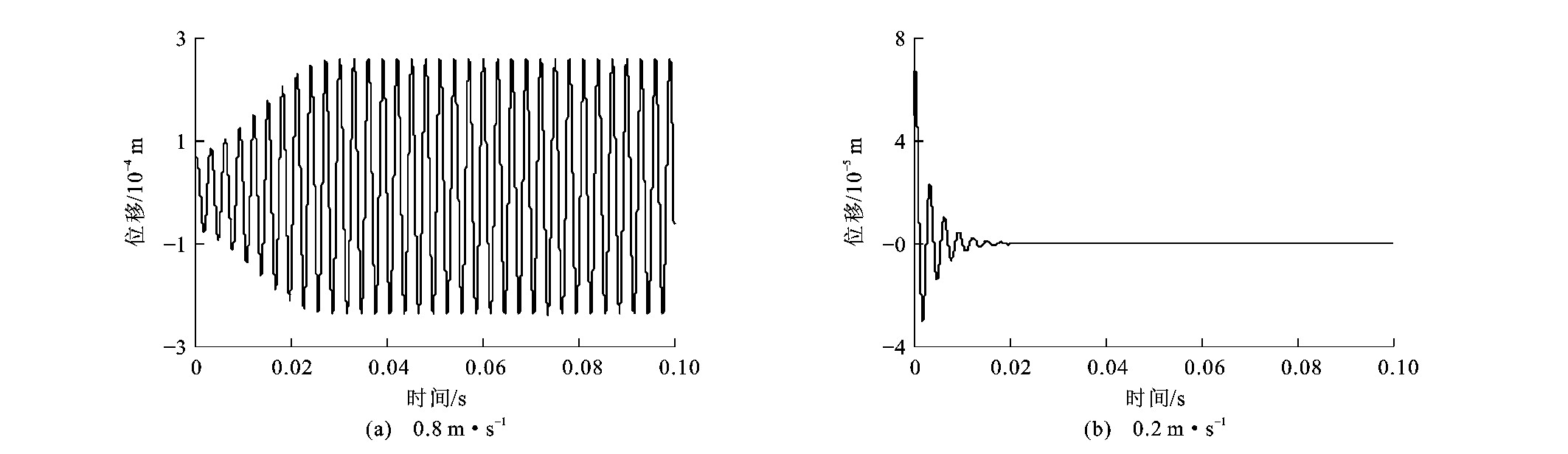
负载波动激扰的机车牵引齿轮振动特性
王燕
,
刘建新
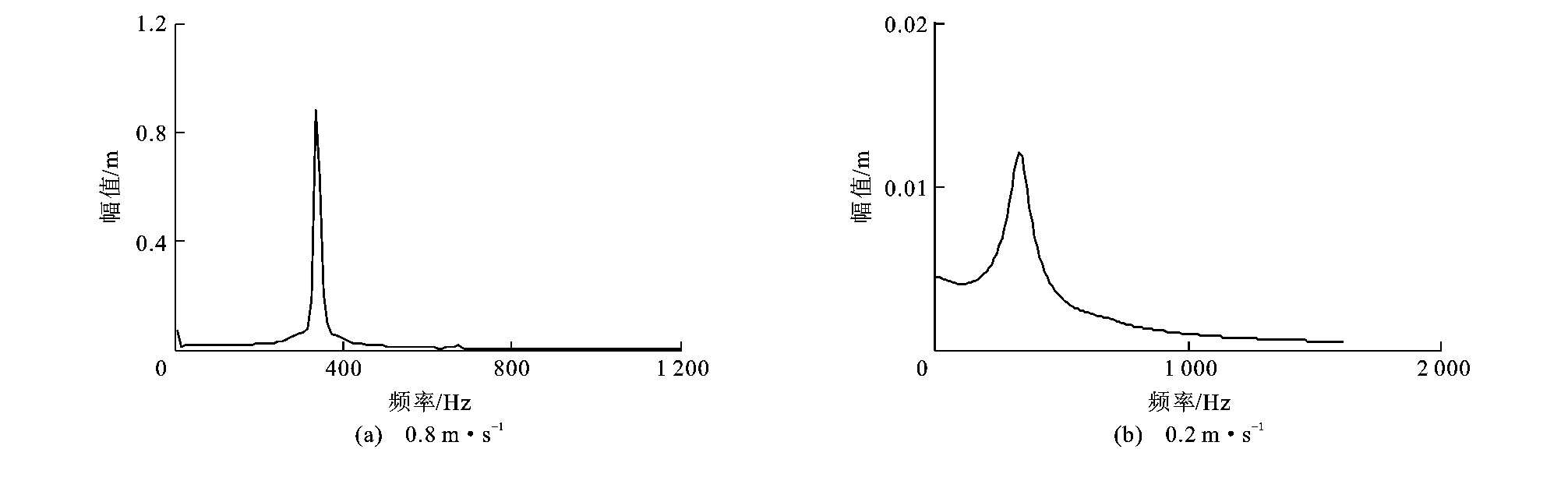
摘要:
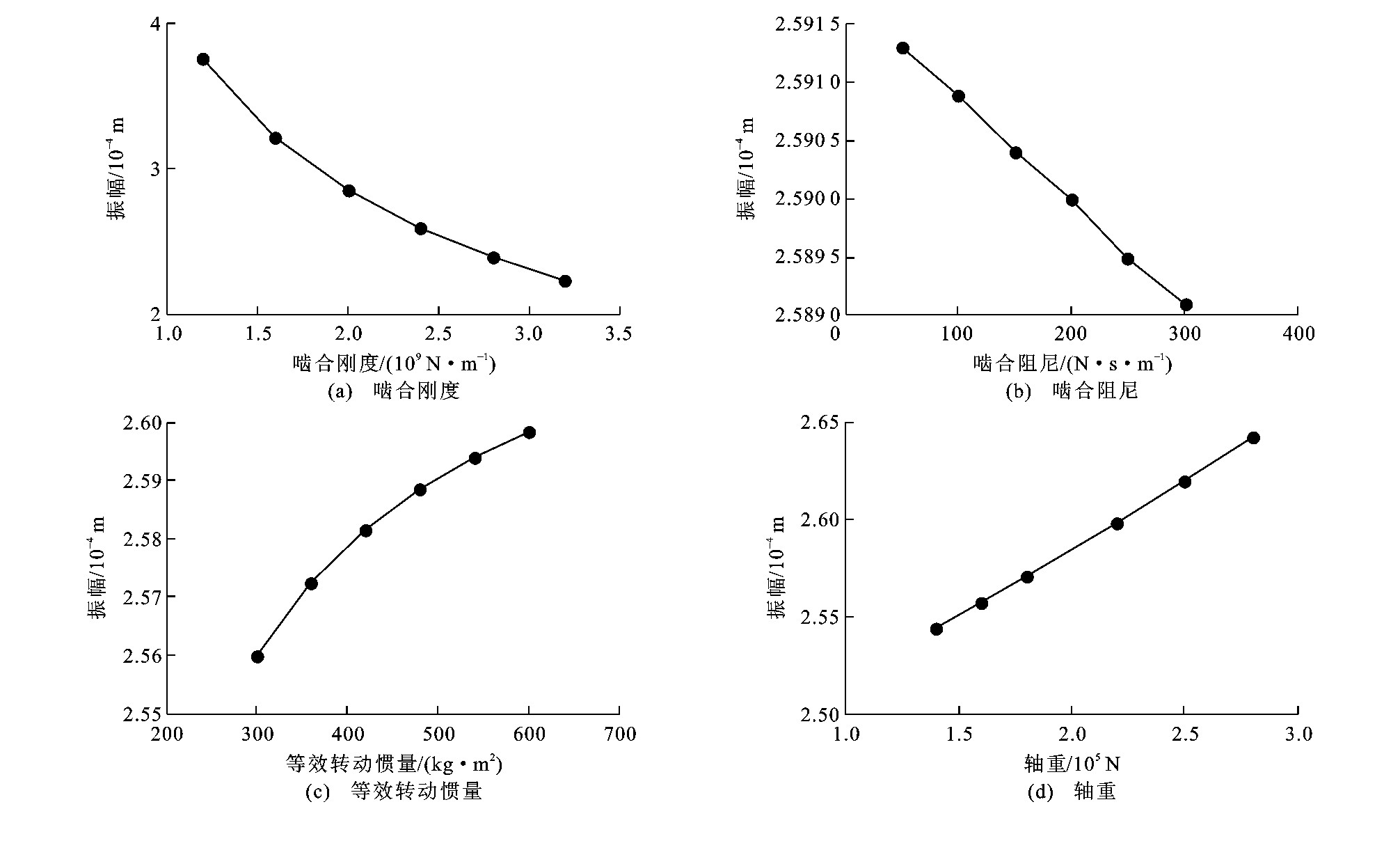
针对负载波动激扰的机车牵引齿轮振动问题, 建立了机车牵引齿轮的动力学方程, 利用平均法得到了齿轮振动频率与振幅, 分析了振幅变化趋势与参数变化对齿轮振动稳定后振幅的影响规律, 并进行了仿真试验。分析结果表明: 负载力矩是振动速度的函数; 振动频率为一个定值, 当蠕滑速度分别为0.8、0.2m·s
-1
时, 齿轮的振动频率均为335.0 Hz, 非常接近理论值334.8 Hz; 根据不同的情况, 振幅逐渐减小至0或逐渐增大至一个稳定的值; 当蠕滑速度为0.8m·s
-1
时, 齿轮振动稳定后的振幅随着齿轮啮合刚度和啮合阻尼的增大而减小, 随着小齿轮上的等效转动惯量和机车轴重的增大而增大, 因此, 增大齿轮啮合刚度和啮合阻尼、减小小齿轮上的等效转动惯量和机车轴重有助于降低齿轮的振幅。
更多>
2015, 15(6): 45-50.
doi:
10.19818/j.cnki.1671-1637.2015.06.006
摘要
(
634
)
HTML
(
139
)
PDF (490KB)
(
661
)
引用
(
)
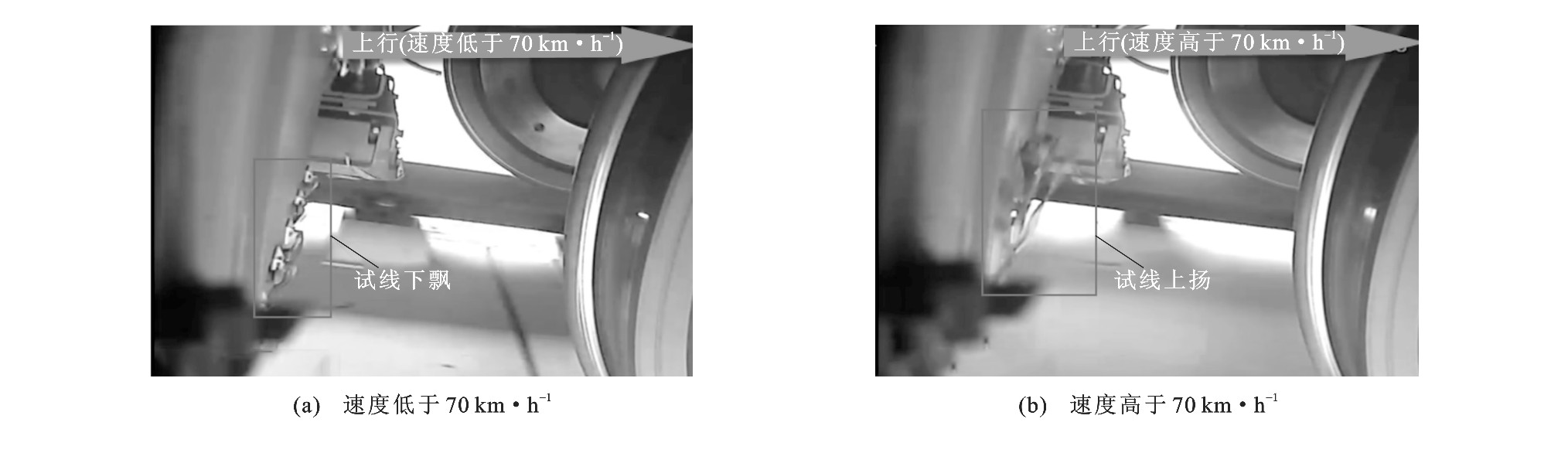
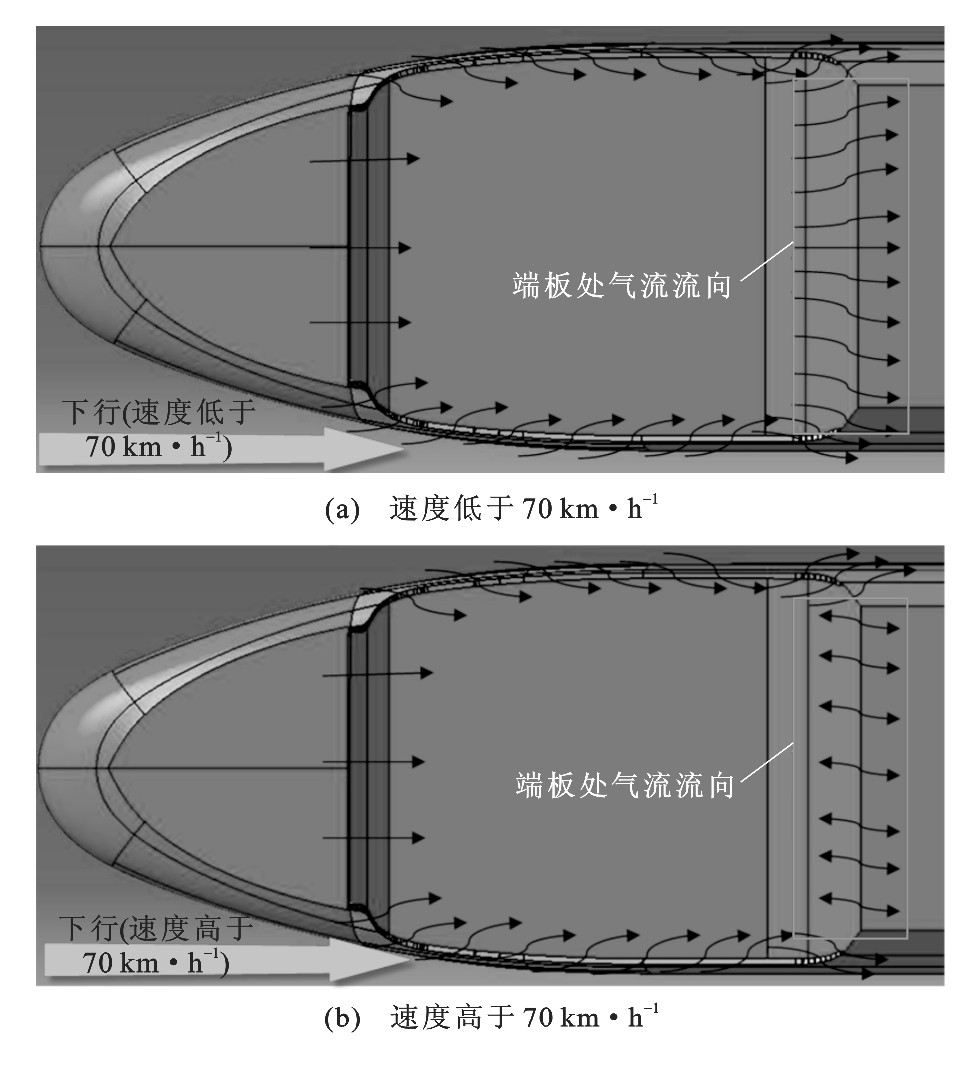
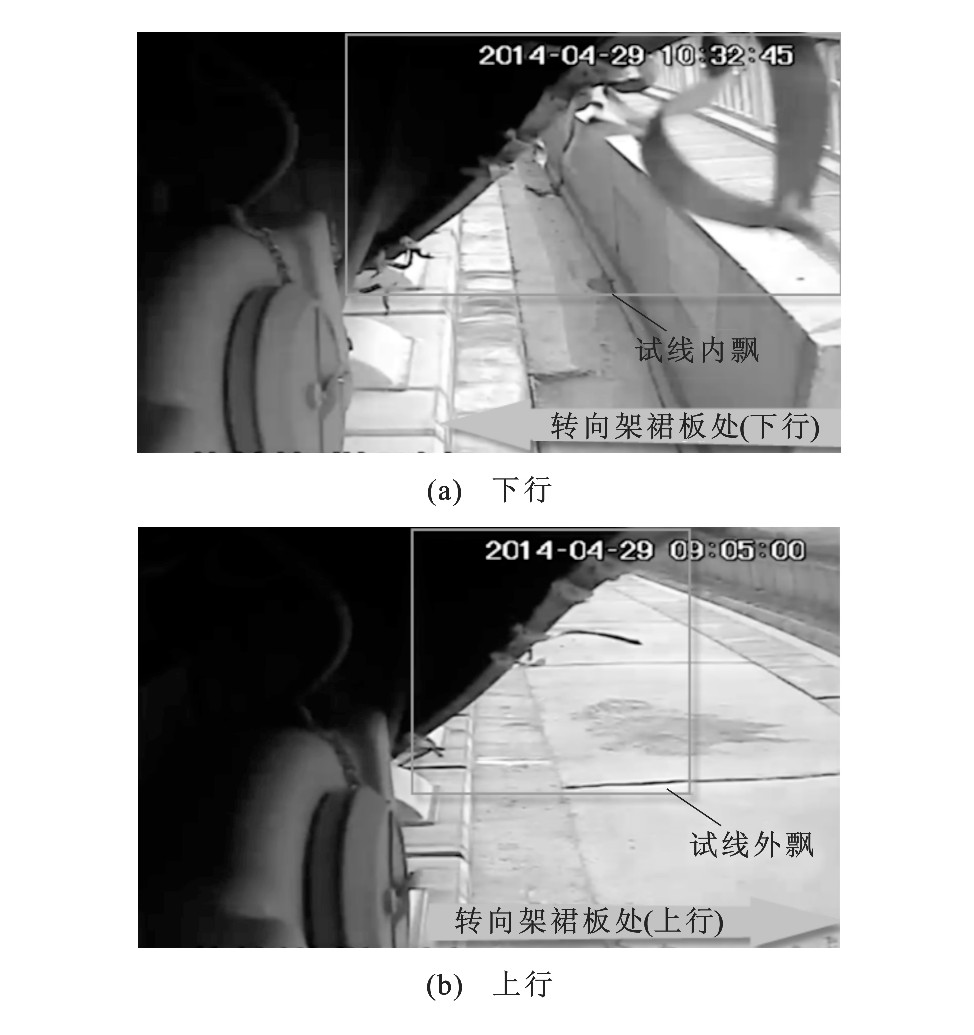
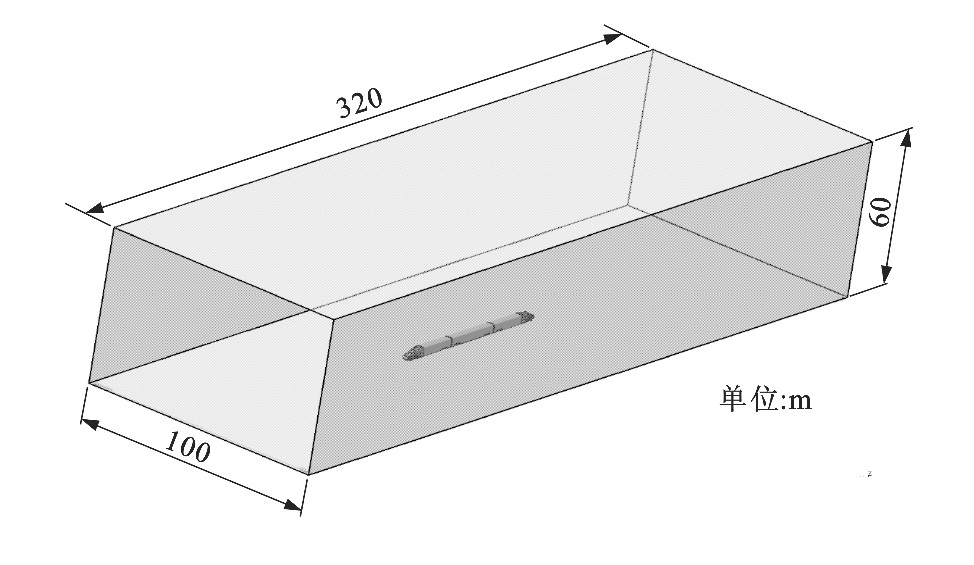
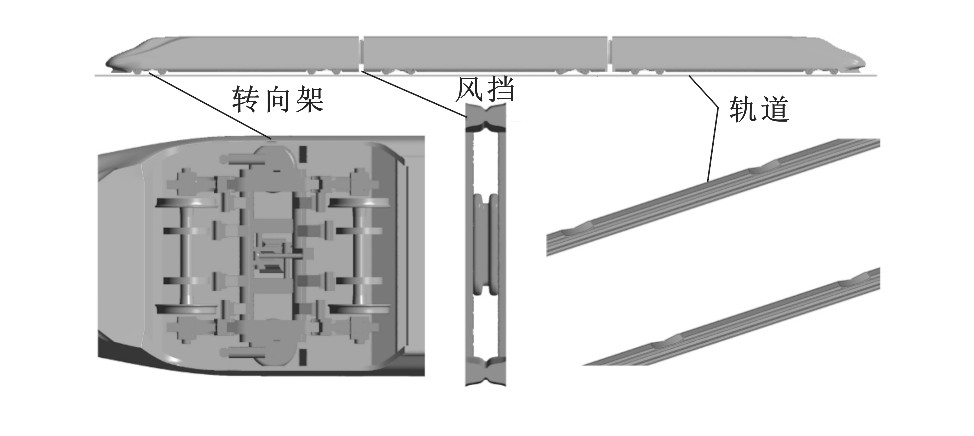
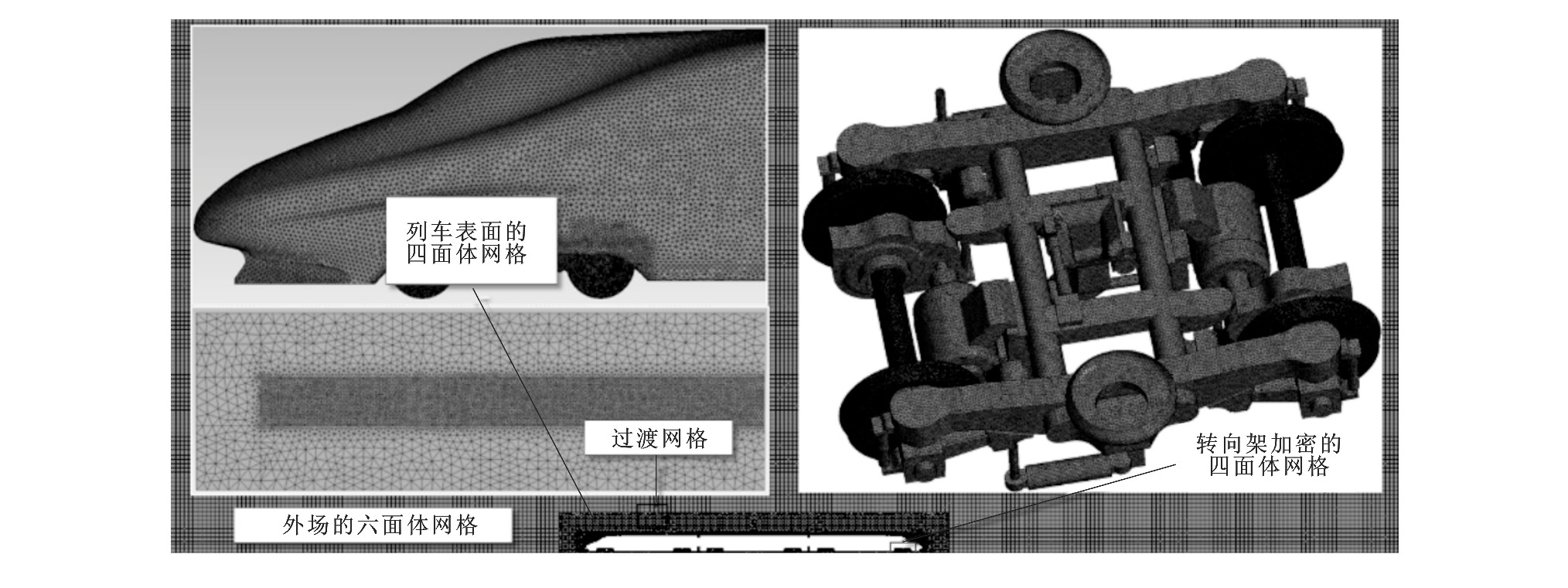
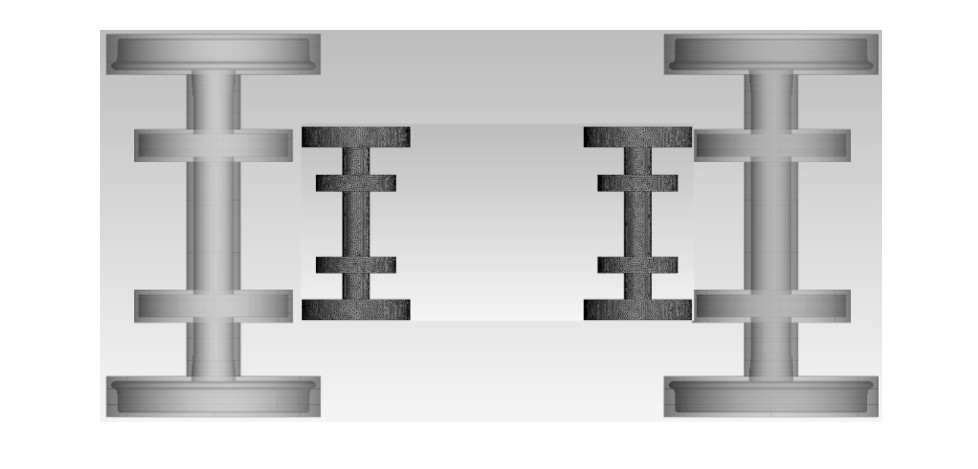
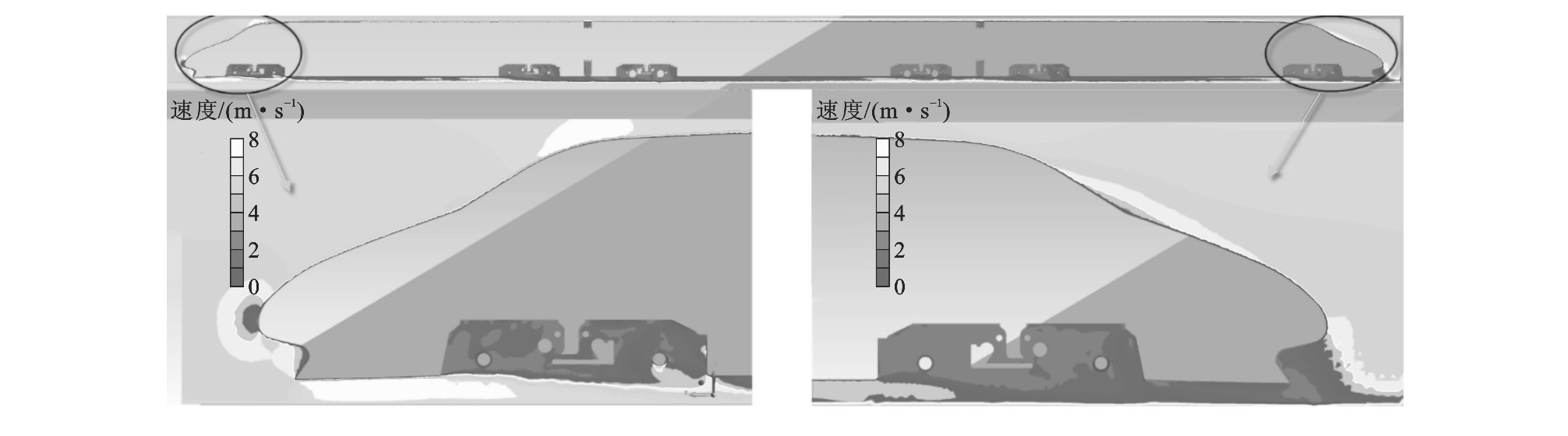
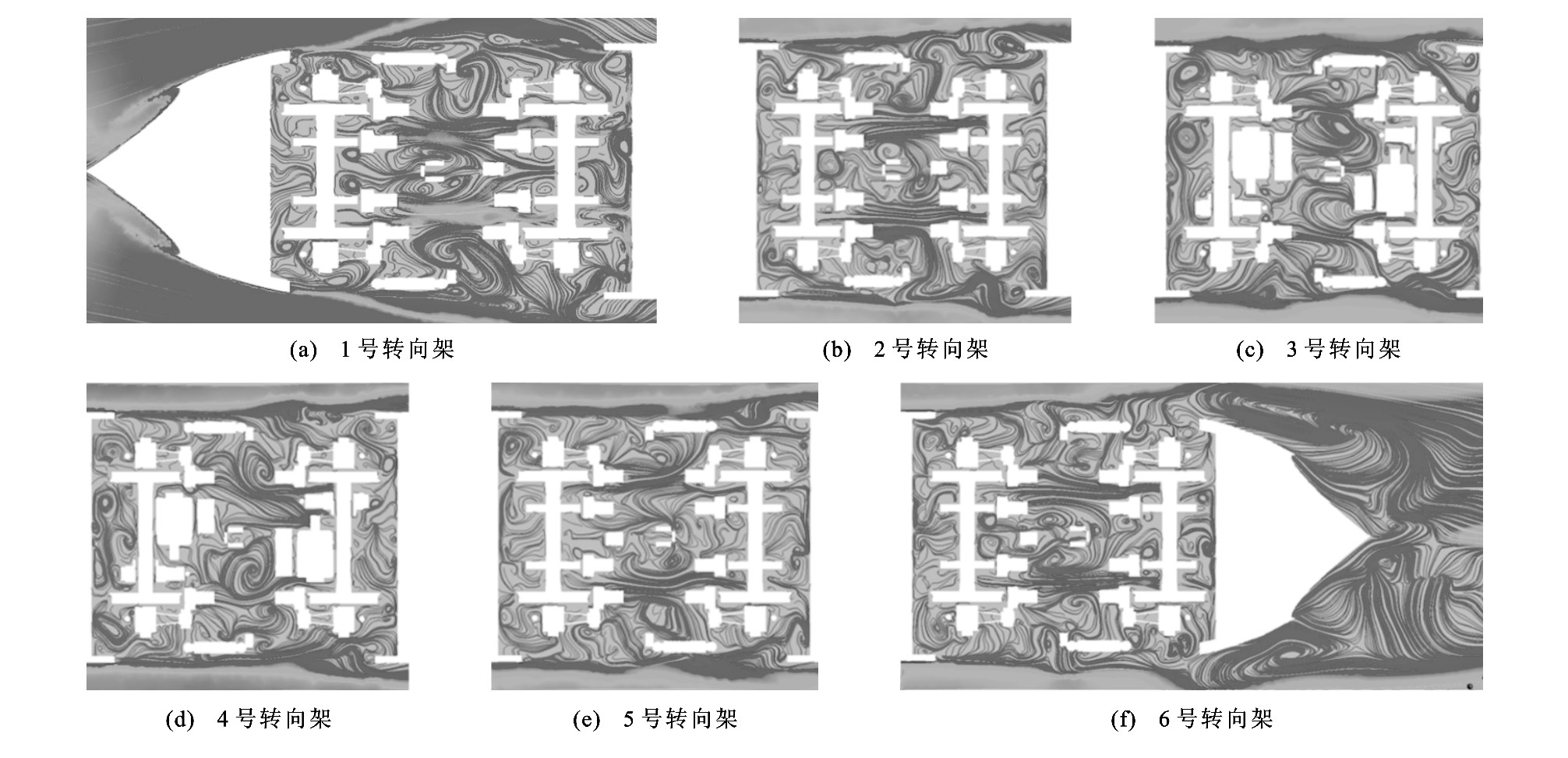
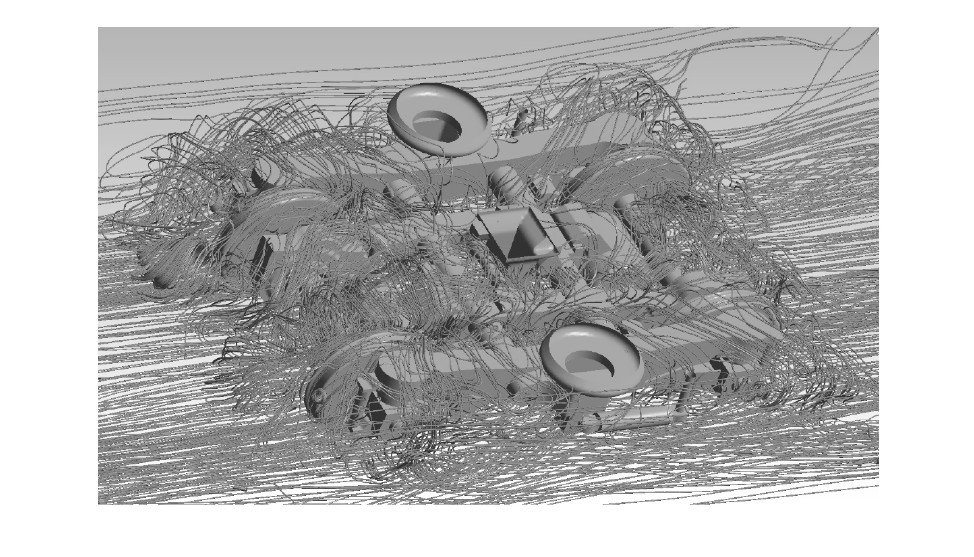
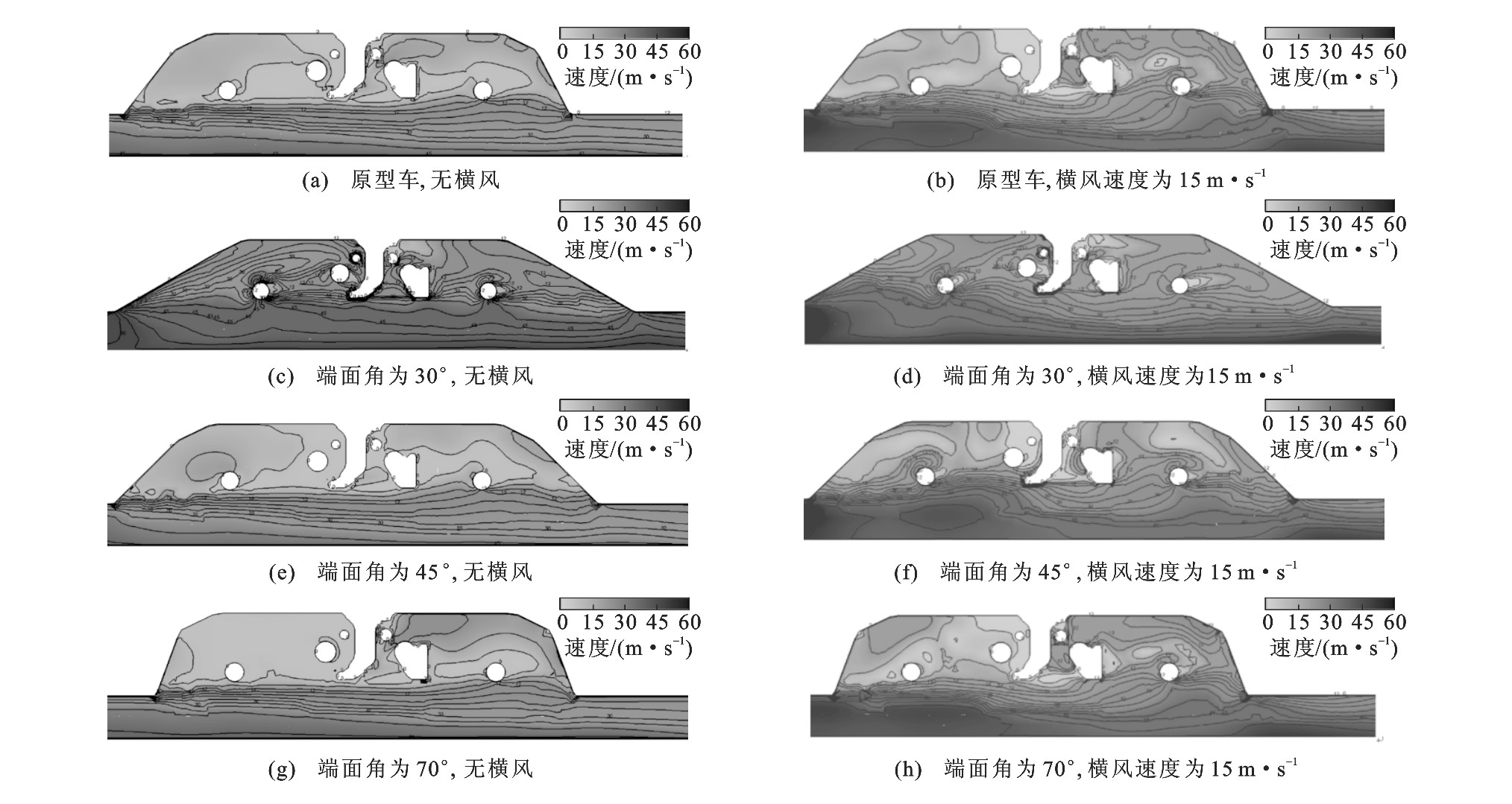
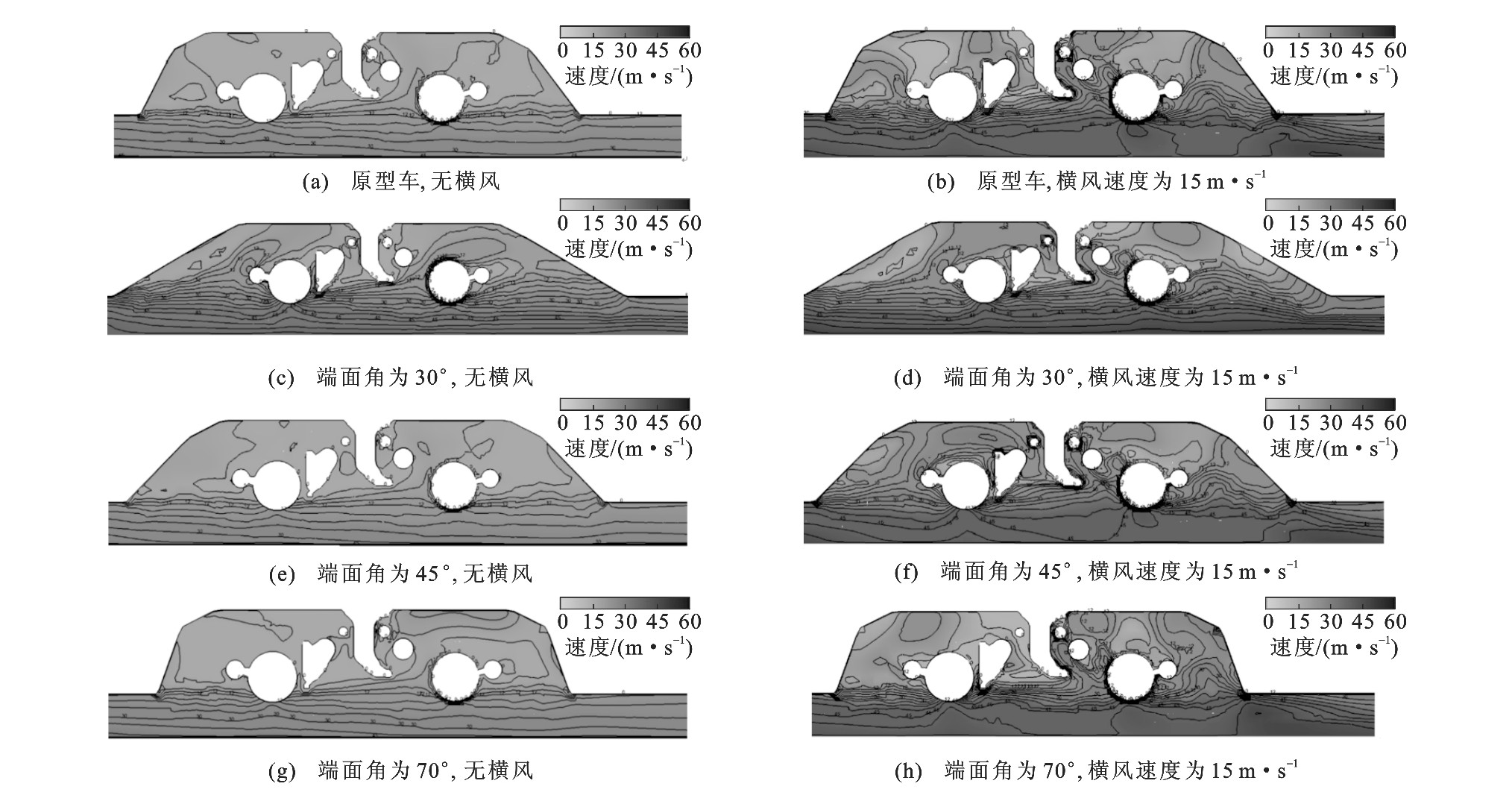
高速列车转向架舱内流场实车测试与数值模拟
韩运动
,
姚松
,
陈大伟
,
梁习锋
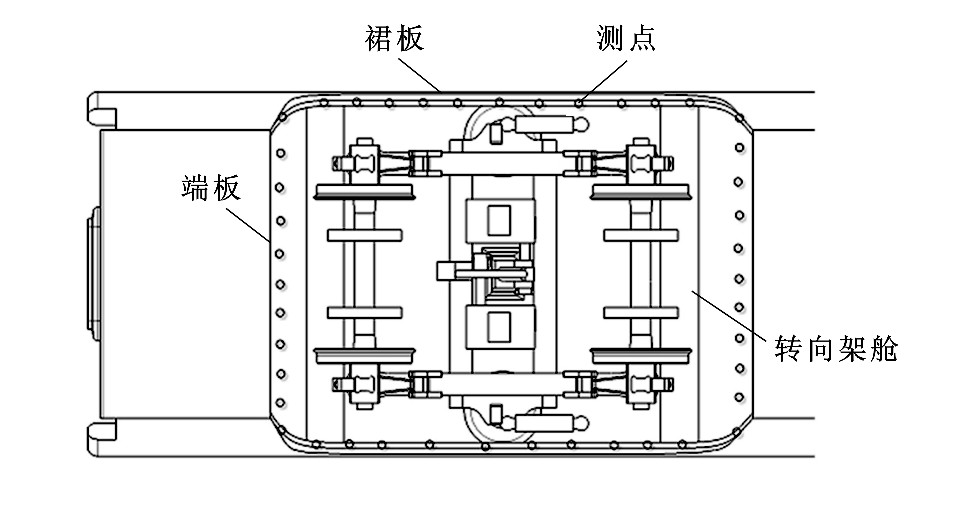
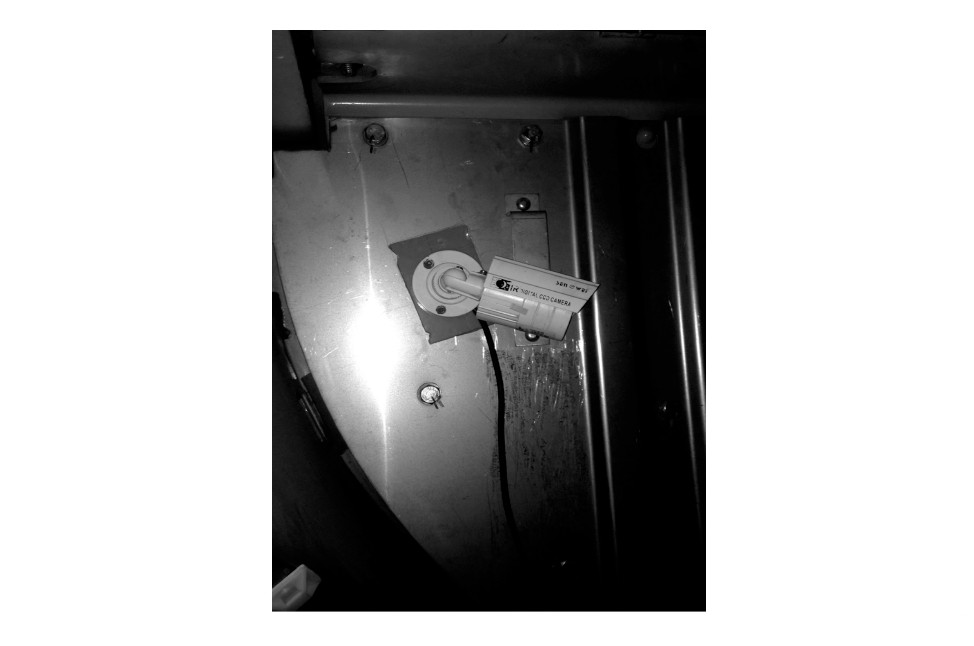
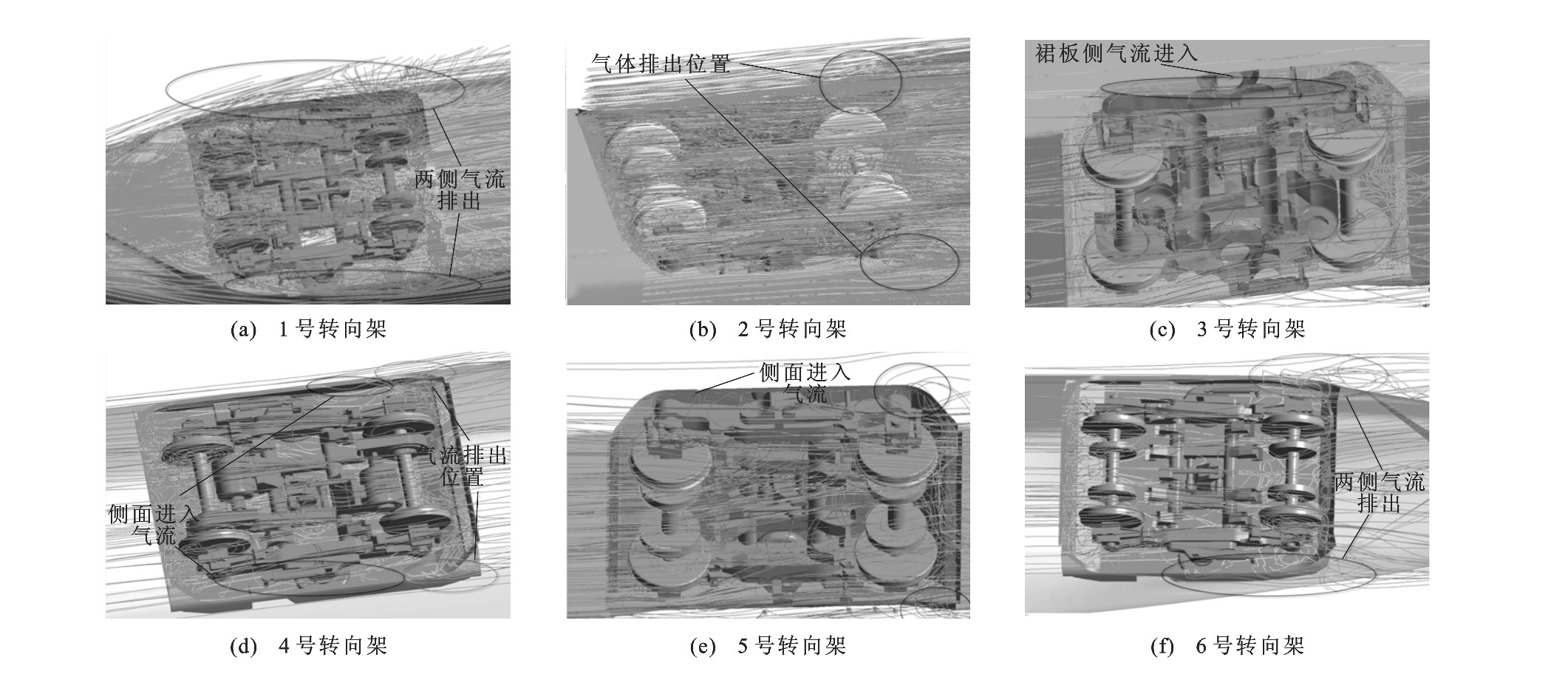
摘要:
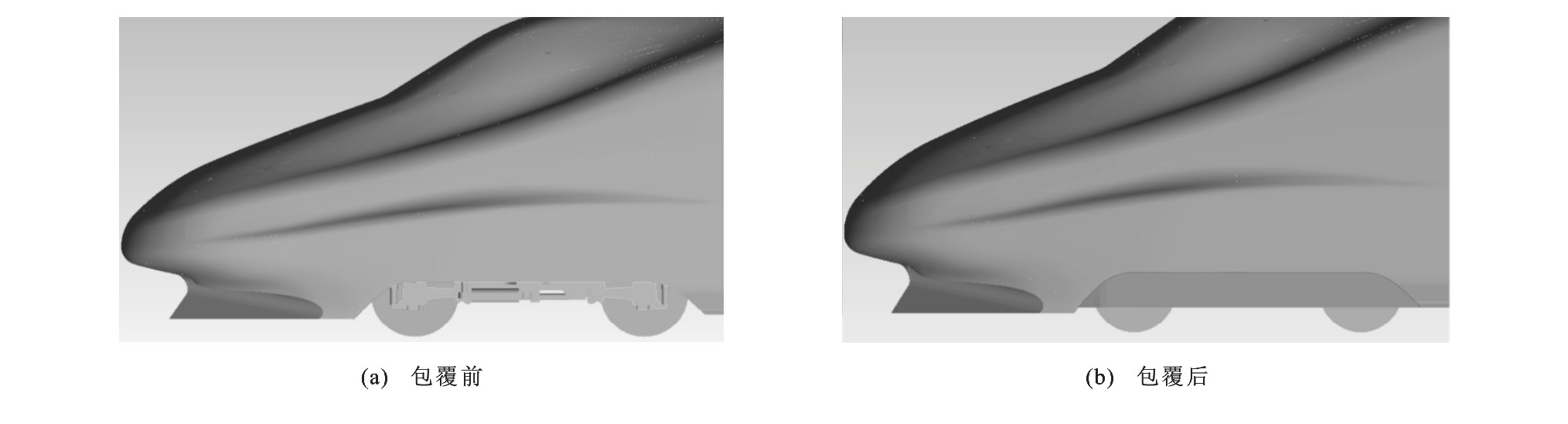
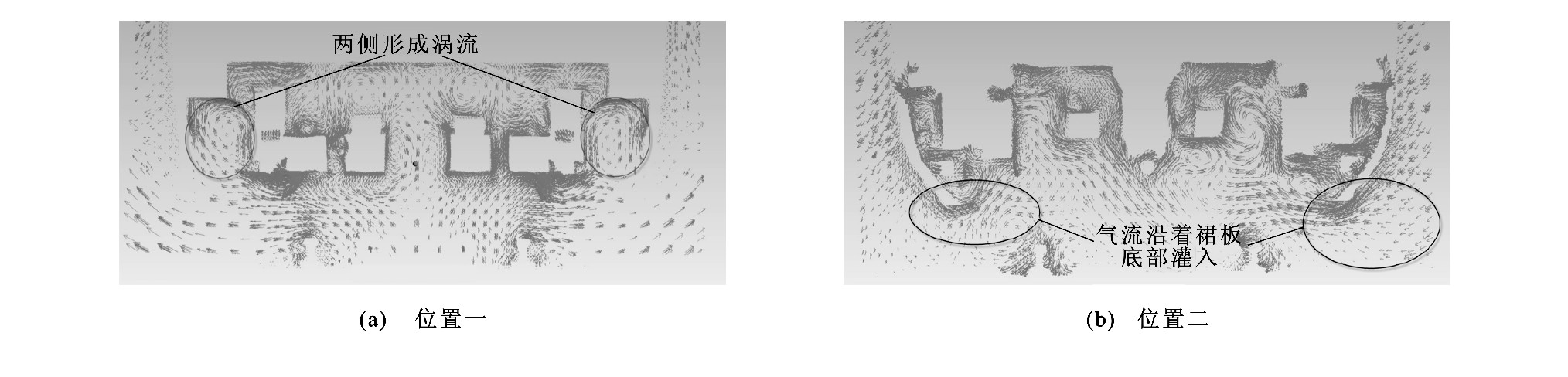
设计了一种高速列车转向架舱内流场状态测试装置。在无横风、横风速度为15m·s
-1
与端板角度分别为30°、45°、70°条件下对转向架舱内流场进行了数值模拟, 并分析了裙板包覆对转向架舱内积雪形成的影响。试验结果表明: 转向架舱内气流流动规律的实测结果与模拟结果相同, 说明数值模拟可行; 动气流由列车底部以及两侧裙板灌入转向架舱内, 流经端板时产生流动分离现象, 大部分气流由端板底部及两侧裙板后部排出; 自头车往后, 流经转向架舱内的气流速度逐渐减小, 裙板处进气区域减小, 裙板后部排气区域增大; 雪粒大多由流经转向架舱底部的气流带入, 然后在转向架流场影响下不断沉积而产生积雪; 合理设置转向架舱端板角度可以减小冰雪在转向架舱内堆积的概率; 包覆裙板并不能有效减少转向架舱内积雪, 不建议采用。
更多>
2015, 15(6): 51-60.
doi:
10.19818/j.cnki.1671-1637.2015.06.007
摘要
(
1049
)
HTML
(
316
)
PDF (5990KB)
(
676
)
引用
(
)
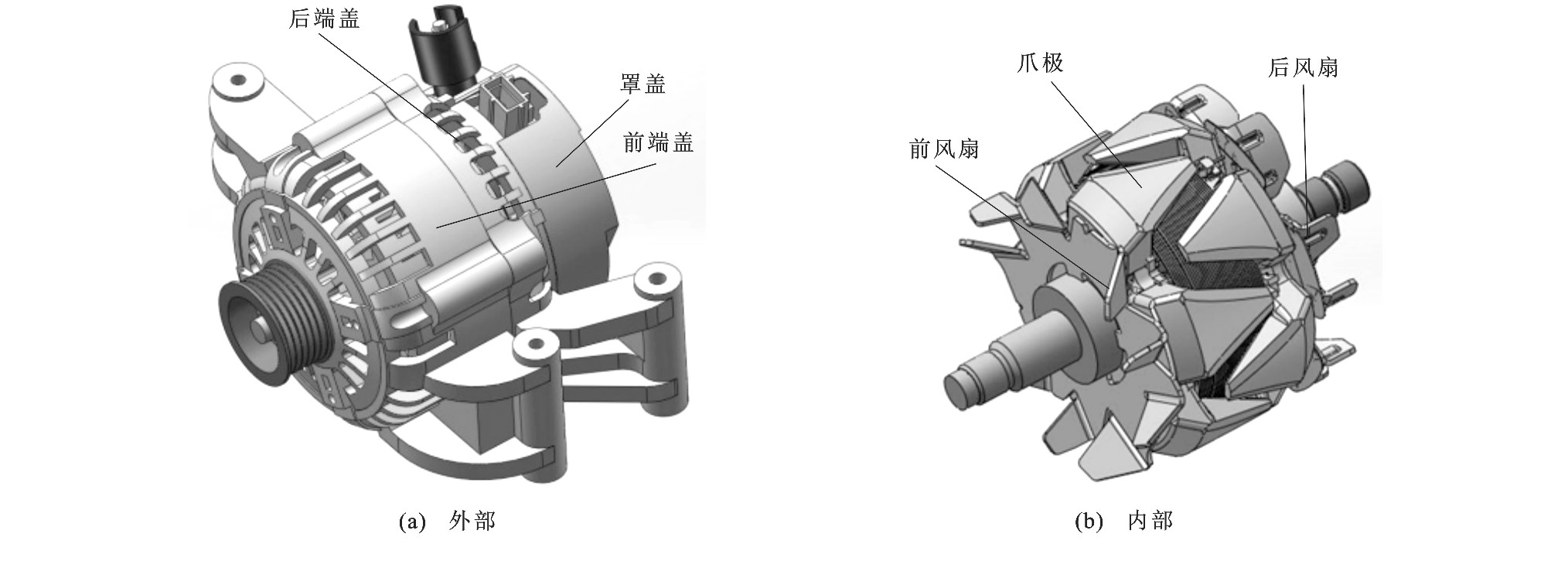
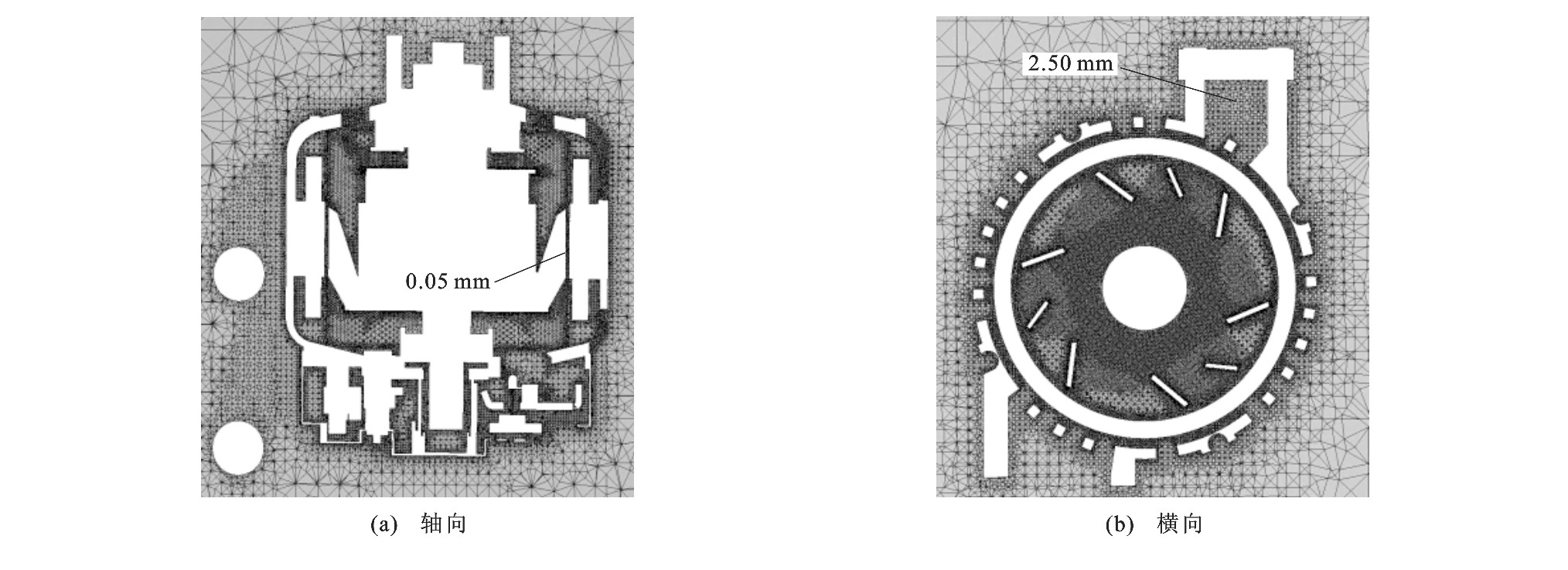
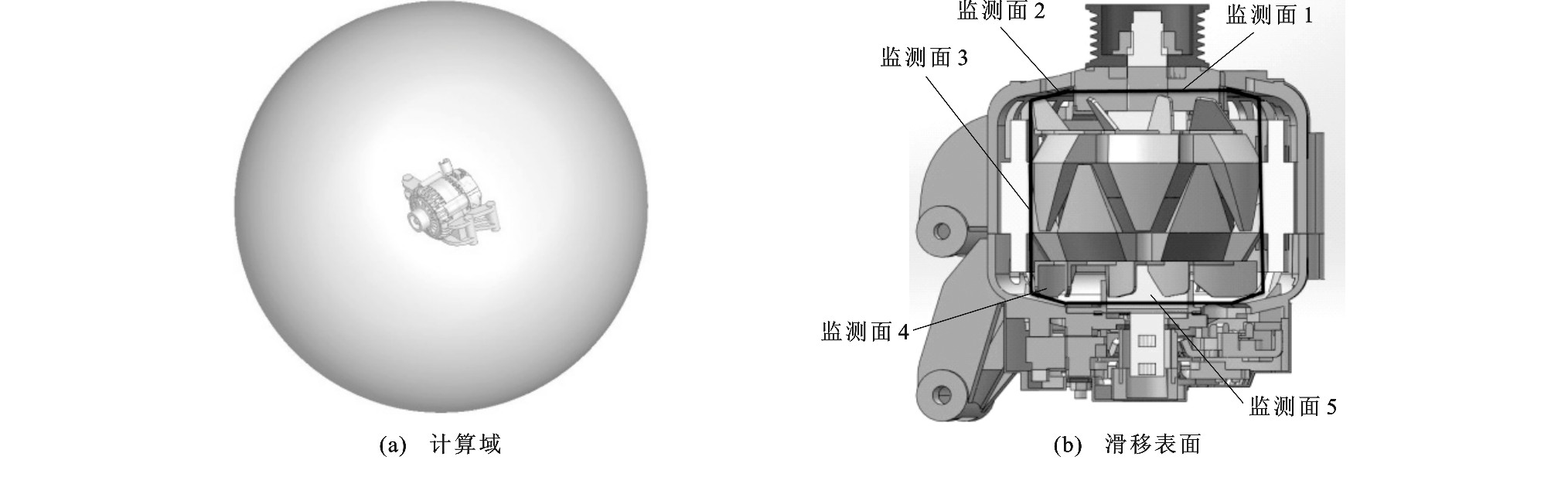
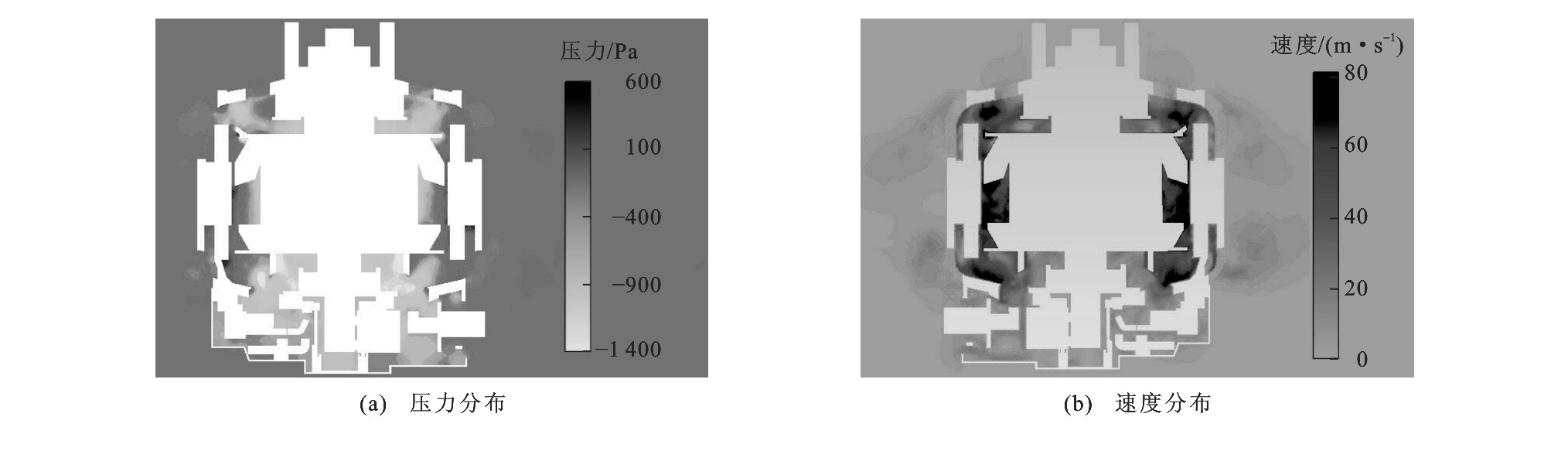
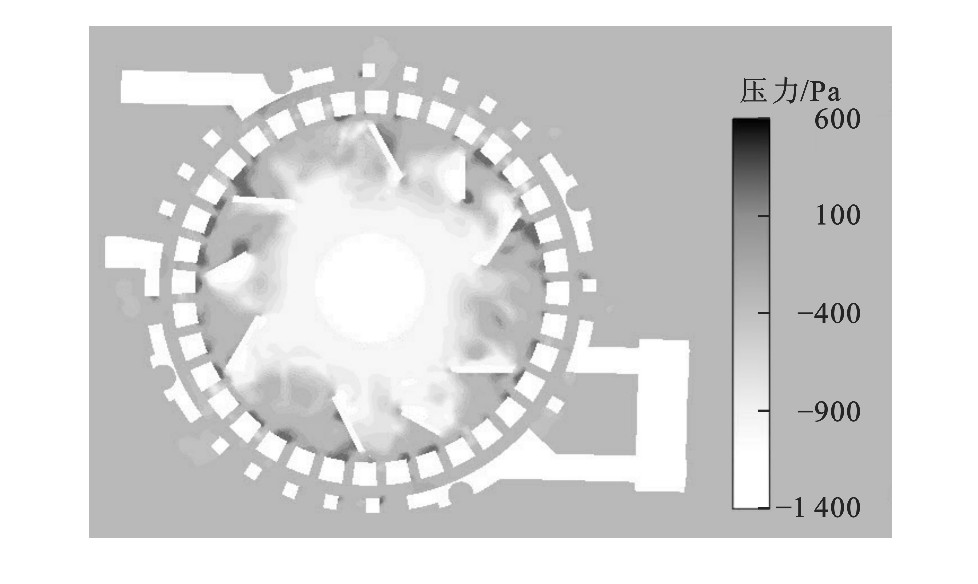
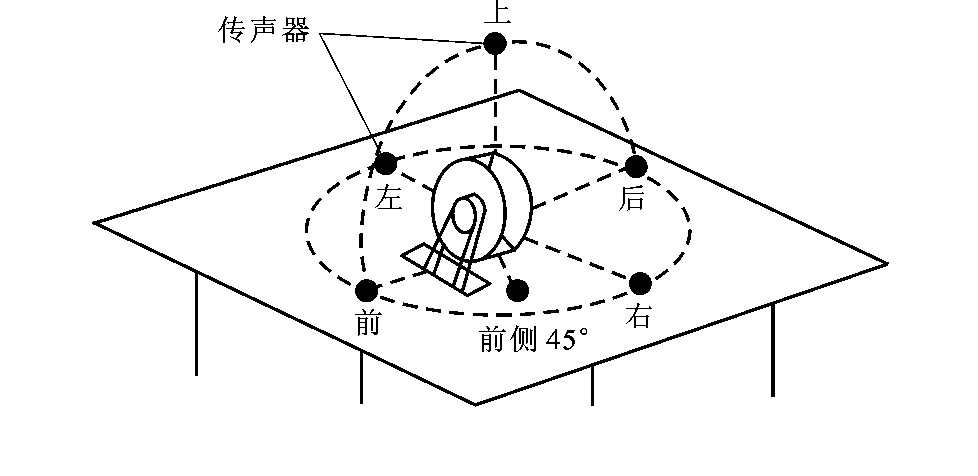
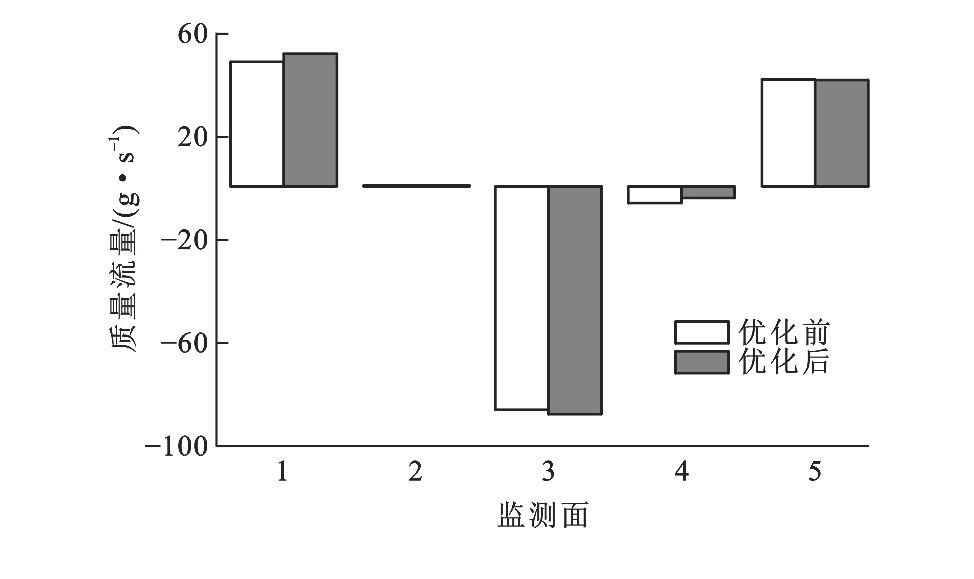
车用交流发电机气动噪声优化
张亚东
,
张继业
,
董大伟
,
闫兵
,
华春蓉
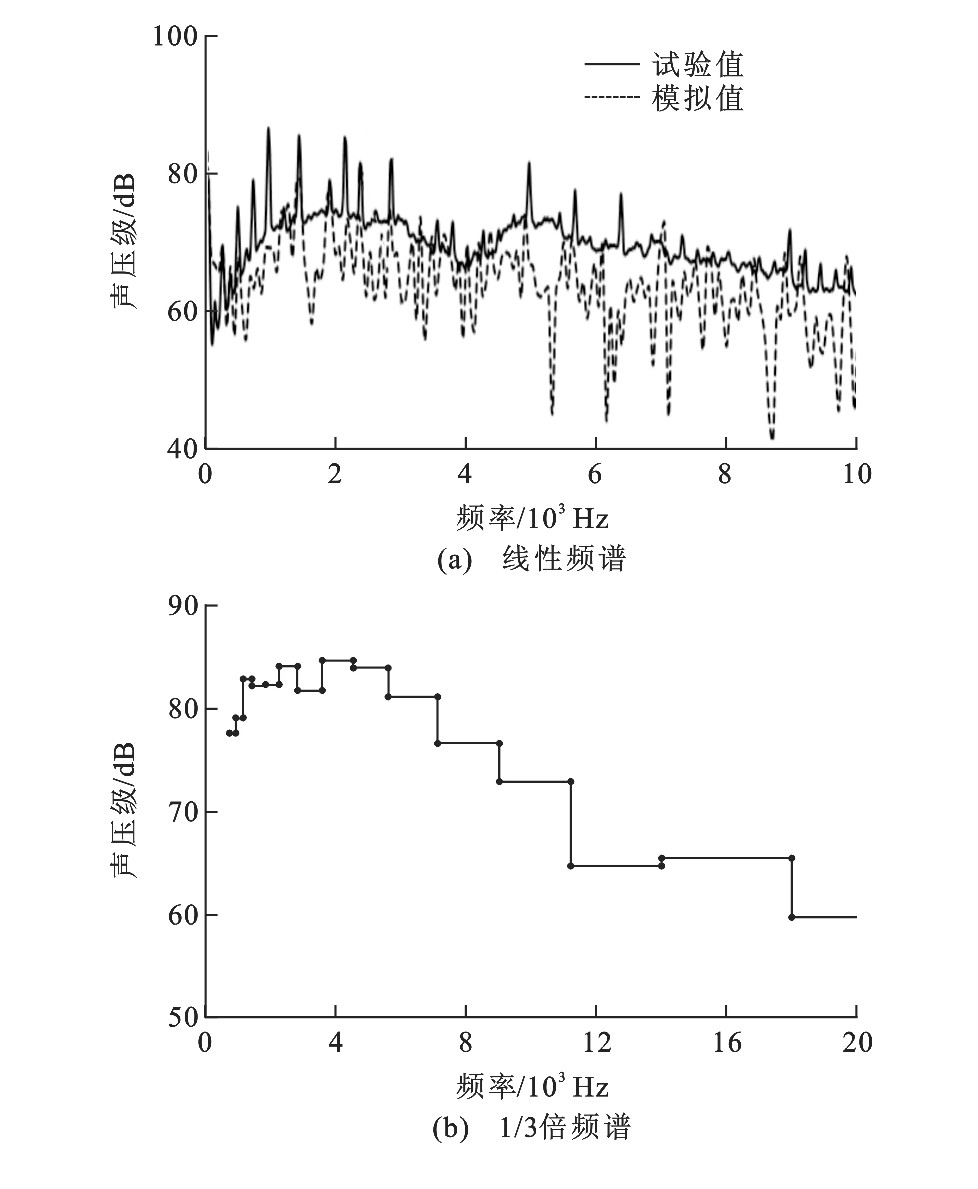
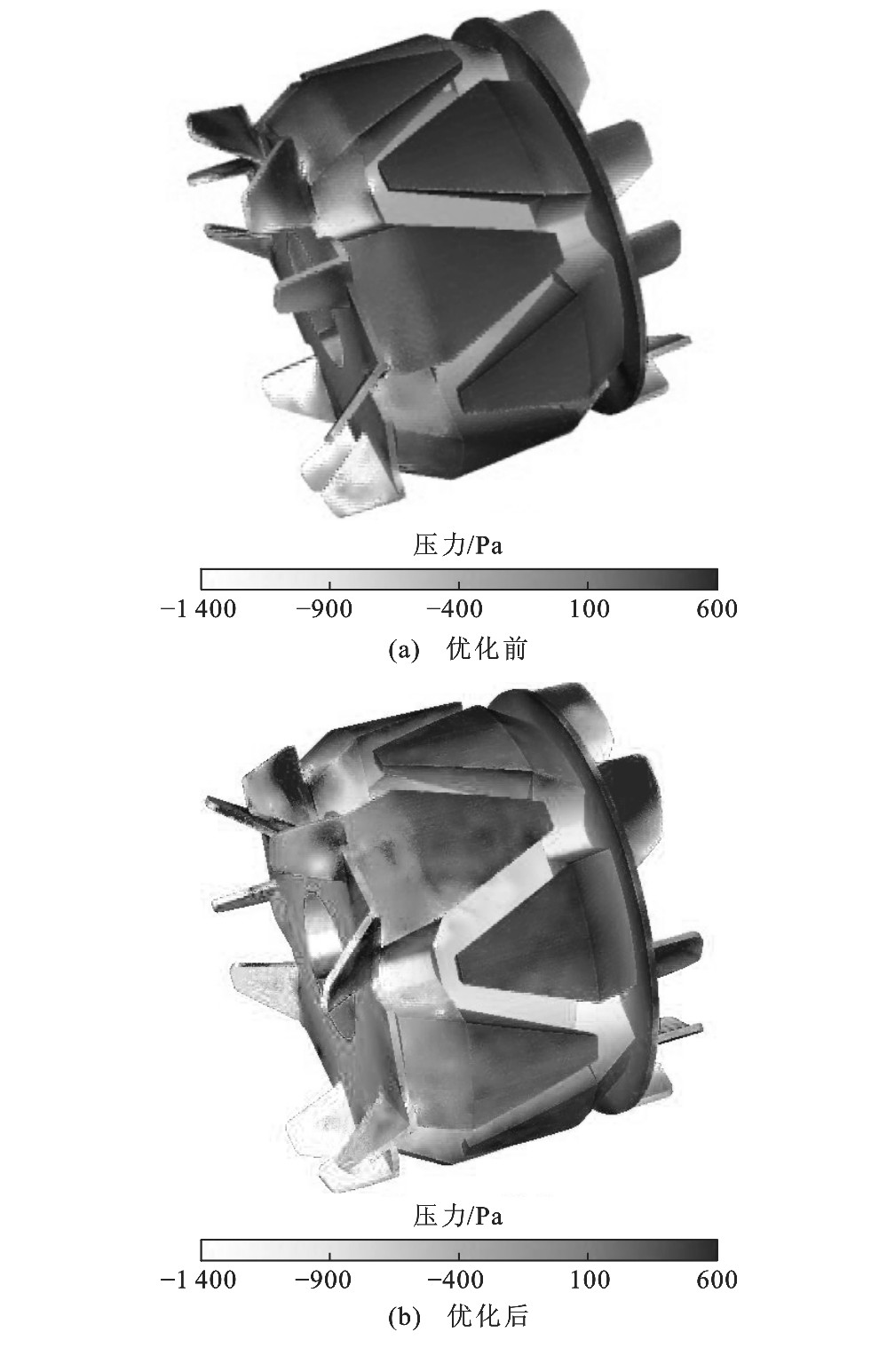
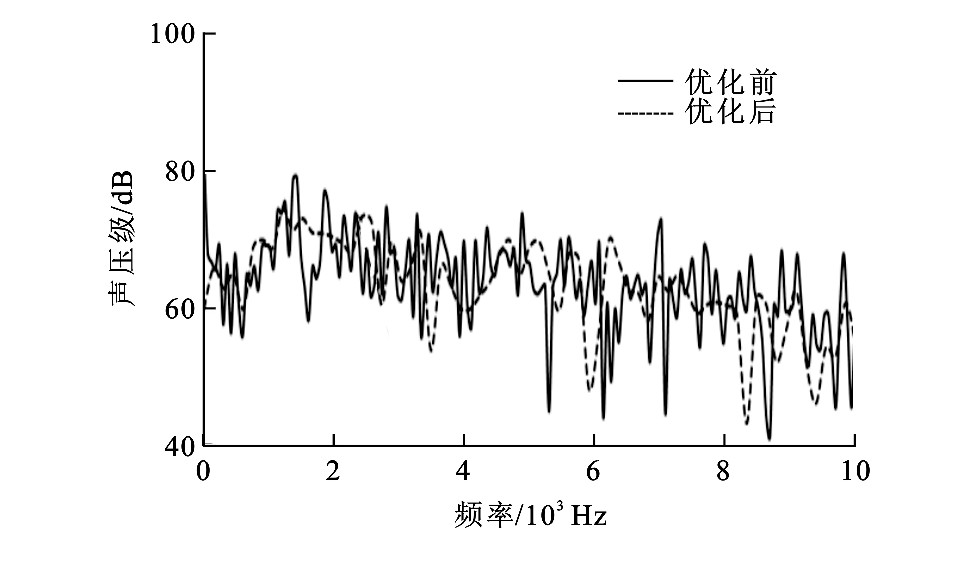
摘要:
采用大涡模拟方法和FW-H声学模型对车用交流发电机气动噪声进行数值模拟, 采用矢量合成方法优化交流发电机前扇叶分布角度, 以低噪声、高流量与优化频谱结构降低单频旋转噪声为目标, 分析了交流发电机气动噪声特性。分析结果表明: 交流发电机噪声声压级、主要影响阶次与幅值的数值模拟与试验结果有很好的一致性; 交流发电机气动噪声源为前后扇叶, 总噪声的主要影响阶次为第6、8、10、12、18阶次, 主要能量集中在1 120~5 600Hz范围内; 总噪声最大预测误差为6.97dB, 第12、18阶次旋转噪声预测误差分别为2.30、3.30dB; 前扇叶分布角度优化后总噪声最大降幅为3.10dB, 平均降幅为2.58dB, 第12、18阶次噪声平均降幅为5.80dB, 降噪效果明显。
更多>
2015, 15(6): 61-67.
doi:
10.19818/j.cnki.1671-1637.2015.06.008
摘要
(
777
)
HTML
(
159
)
PDF (2271KB)
(
640
)
引用
(
)
交通运输规划与管理
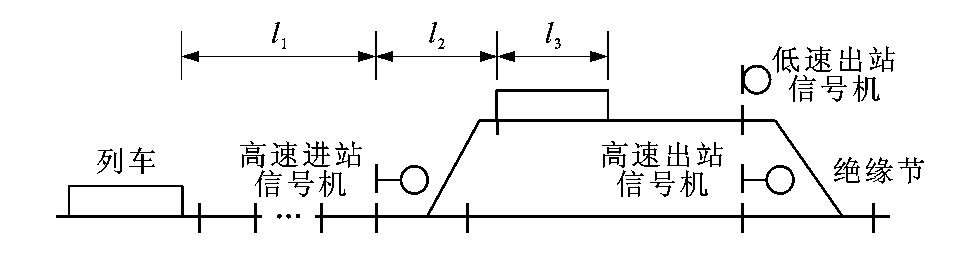
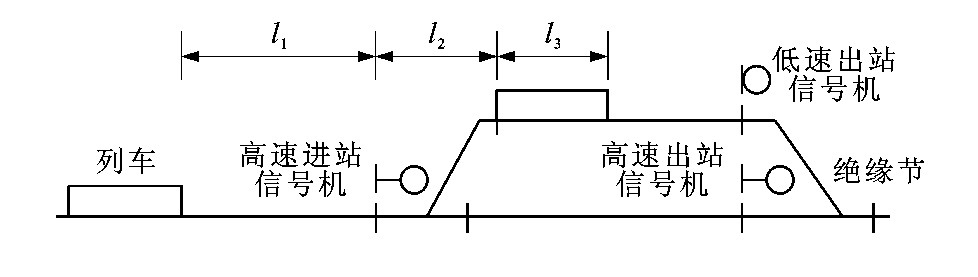
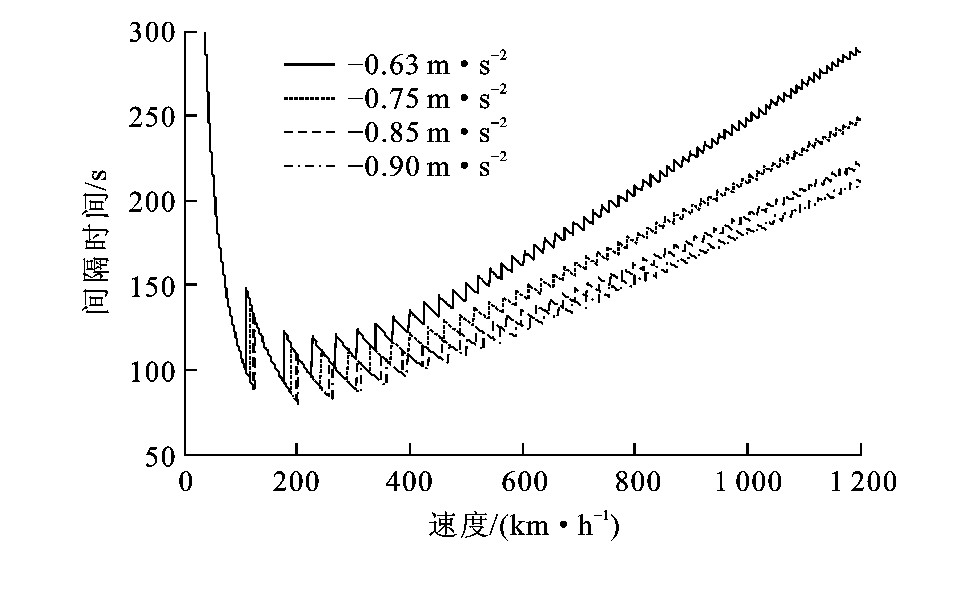
高速列车运行速度作用于线路运能的规律
潘登
,
梅萌
,
郑应平
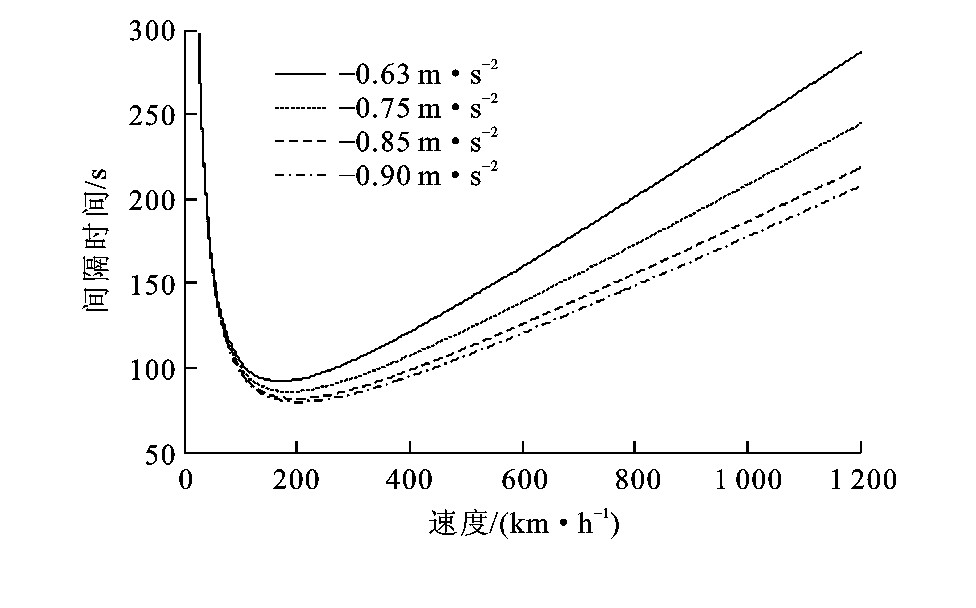
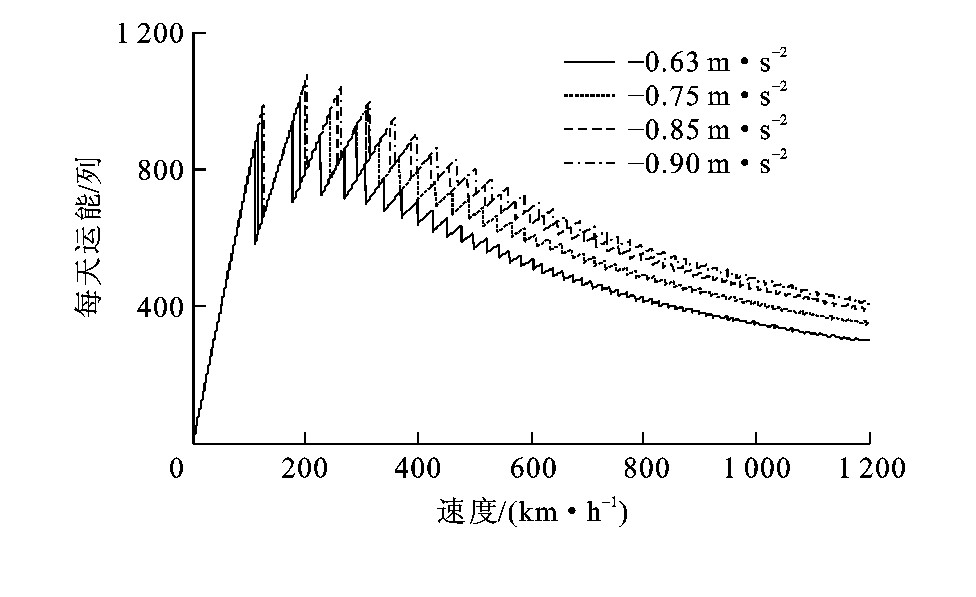
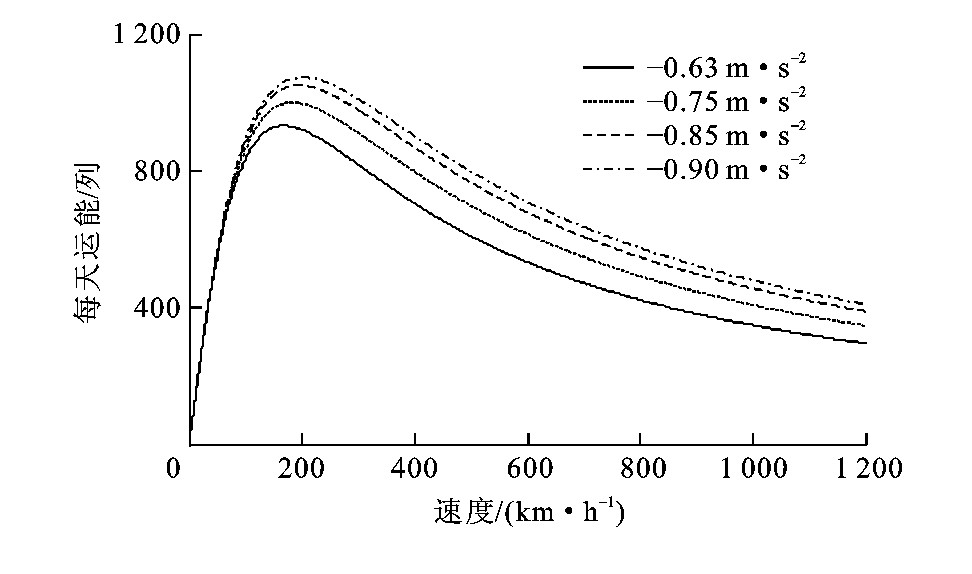
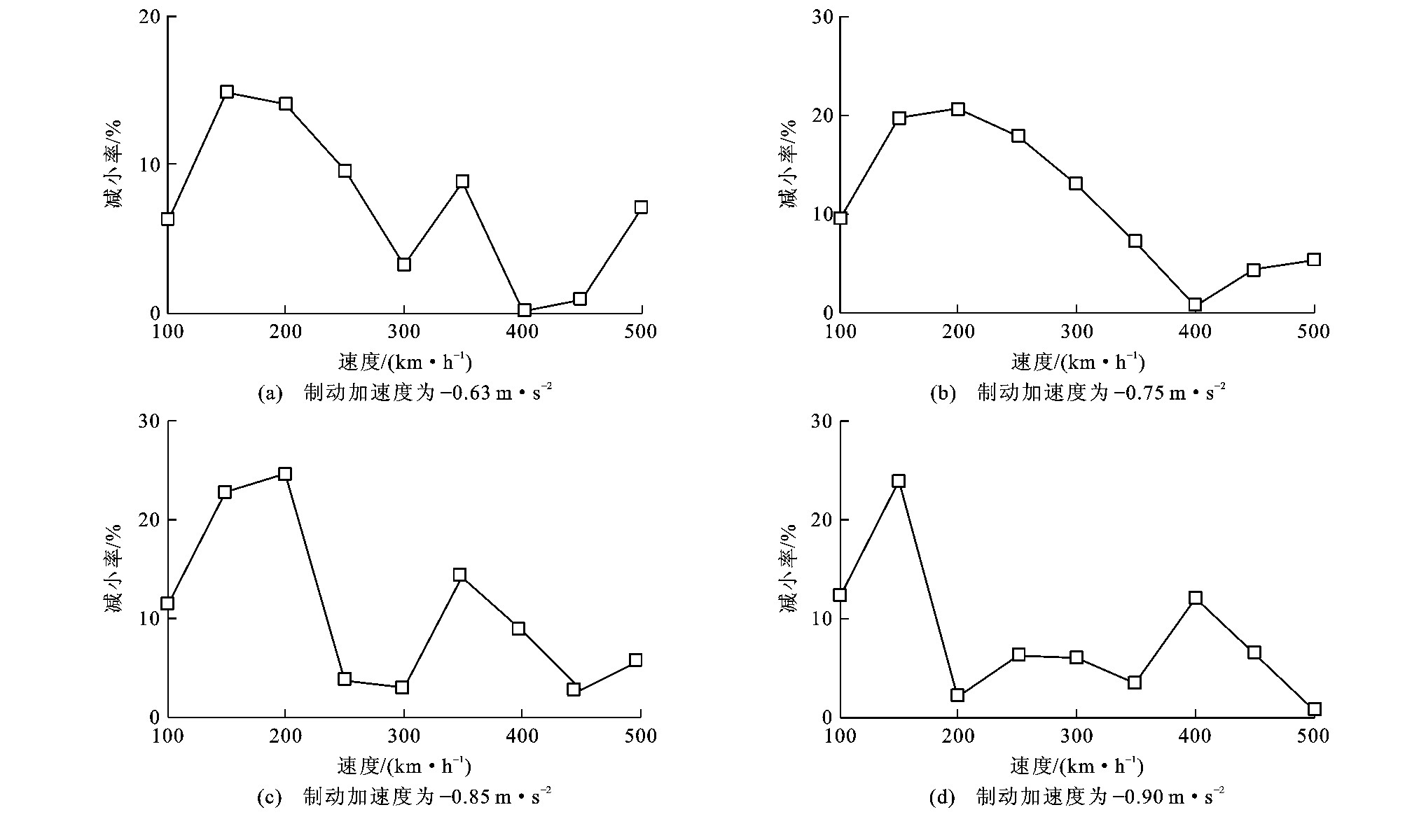
摘要:
应用准移动闭塞系统和移动闭塞系统数学模型计算了总车距、列车间隔时间和线路运能, 选取制动加速度分别为-0.63、-0.75、-0.85、-0.90m·s
-2
进行了仿真试验, 分析了高速列车运行速度作用于线路运能的规律。分析结果表明: 安全车距与列车减速停车时的初始速度呈正比关系, 列车间隔时间和线路运能与安全车距、列车运行速度和初始参数取值密切相关; 列车间隔时间存在极小值, 线路运能存在极大值; 制动加速度越小, 列车间隔时间越小, 线路运能越大; 列车间隔时间可以控制在3min以内, 线路每天运能可以达到1 000列以上; 准移动闭塞系统的列车间隔时间大于移动闭塞系统, 线路运能低于移动闭塞系统; 考虑工程应用的可行性使得准移动闭塞系统与移动闭塞系统的线路运能差距进一步扩大。
更多>
2015, 15(6): 68-74.
doi:
10.19818/j.cnki.1671-1637.2015.06.009
摘要
(
941
)
HTML
(
150
)
PDF (458KB)
(
573
)
引用
(
)
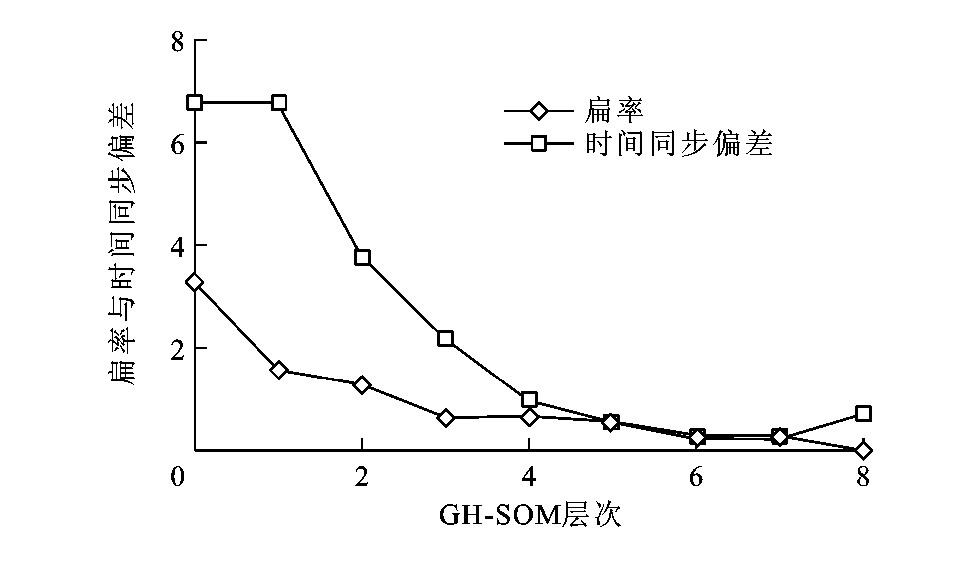
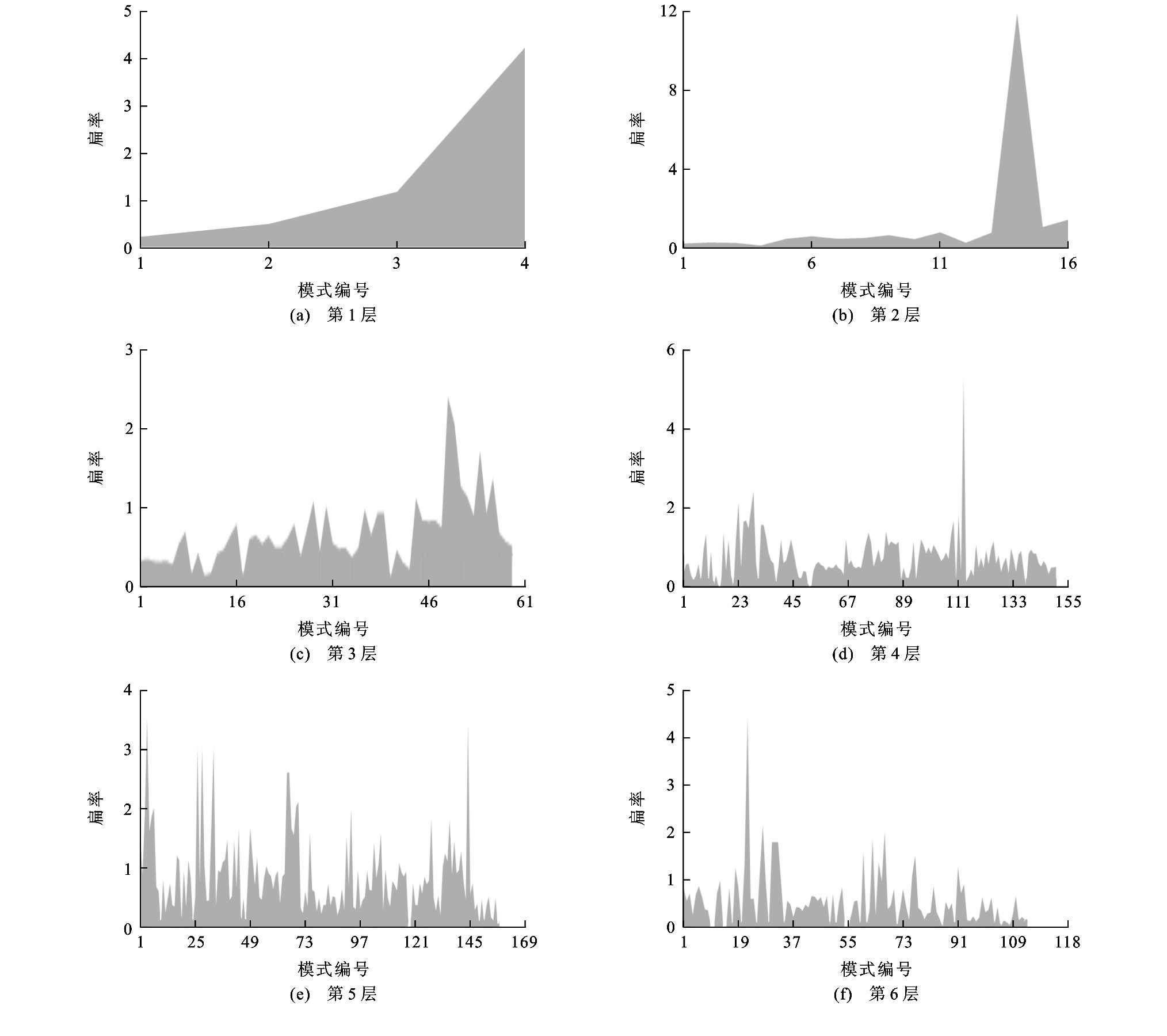
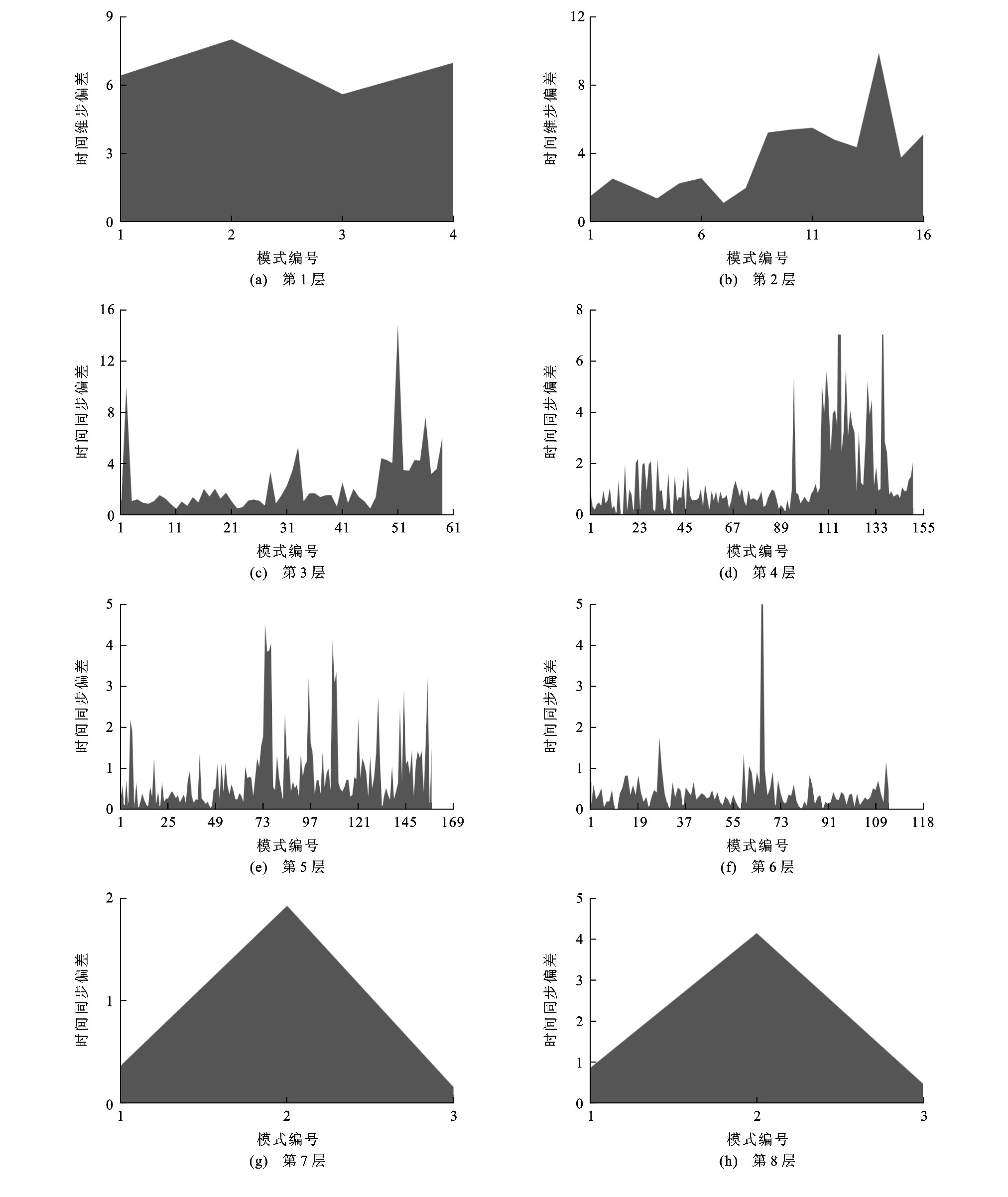
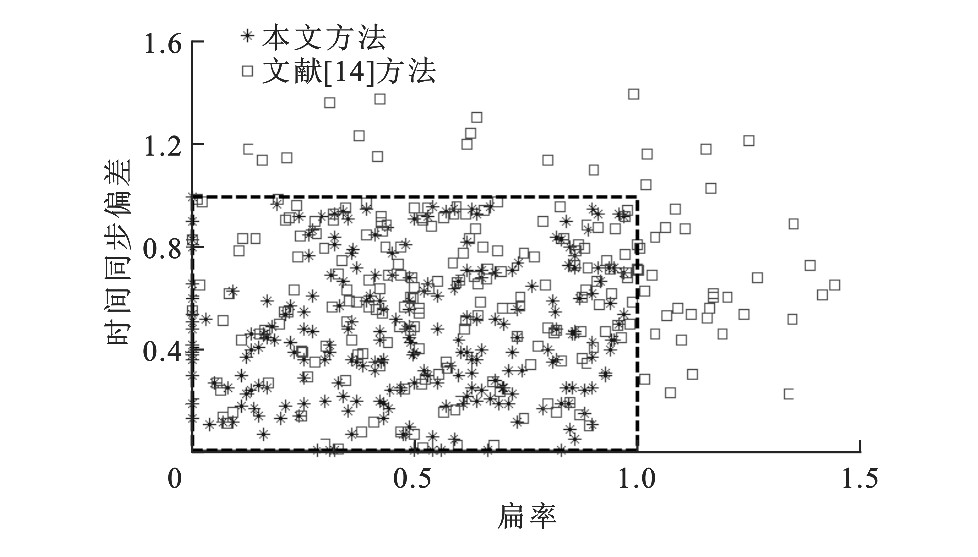
基于改进GH-SOM的可接受航班编队调度优化
孟令航
,
徐肖豪
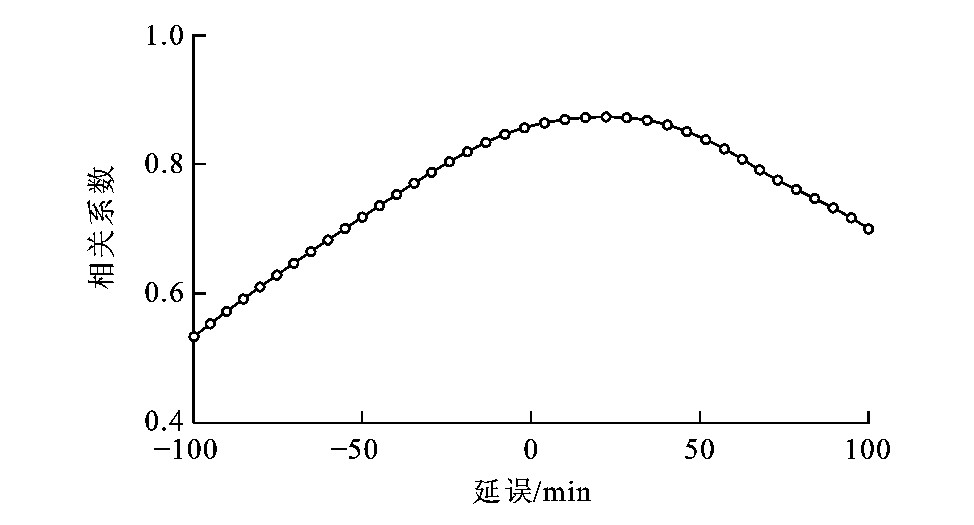
摘要:
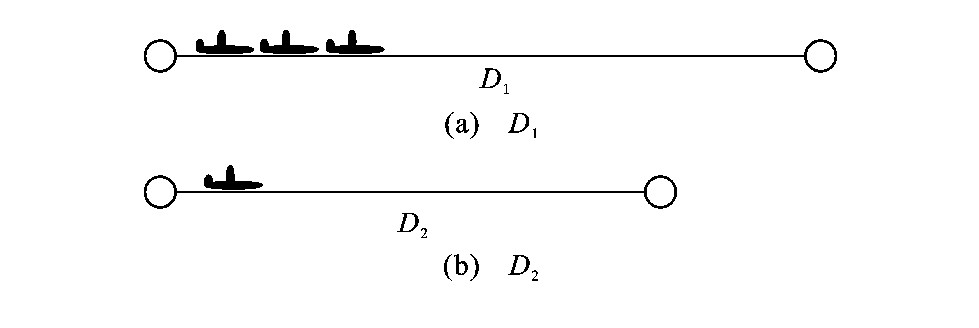
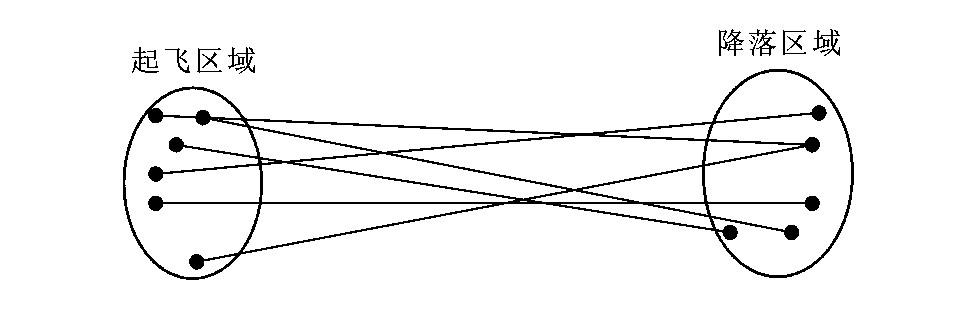
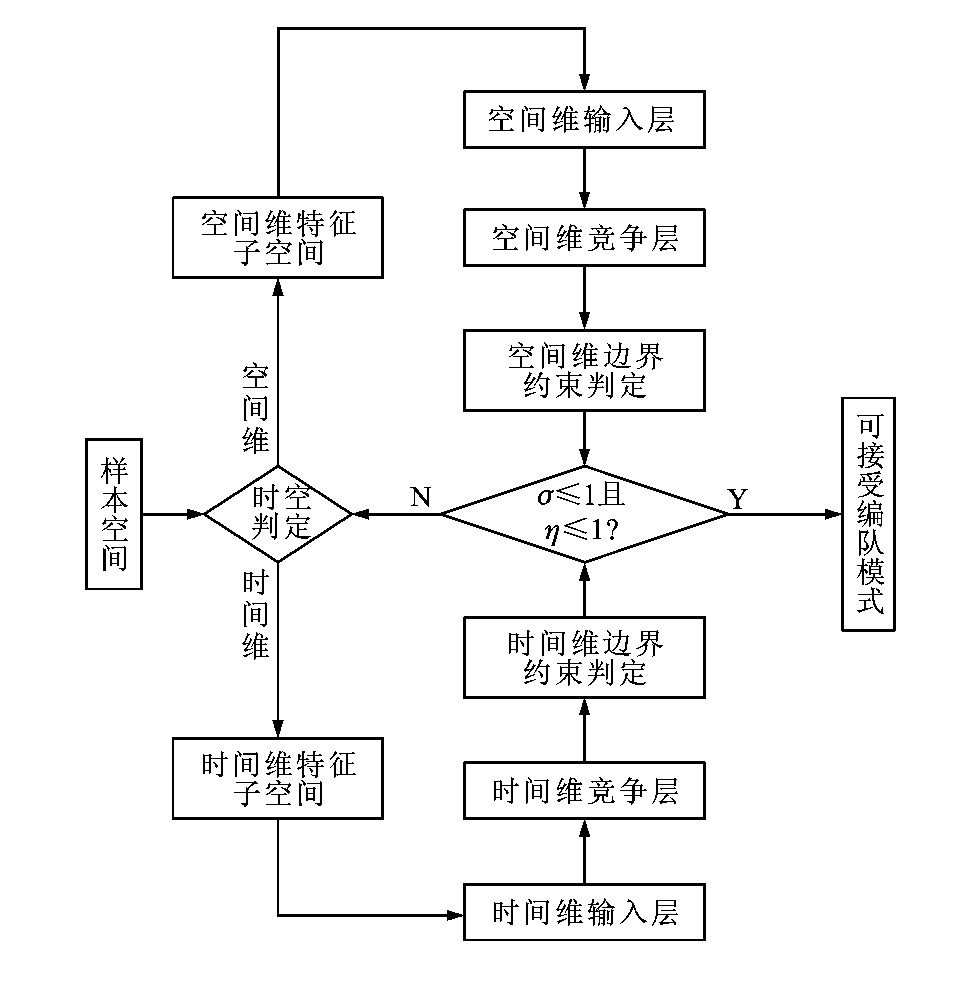
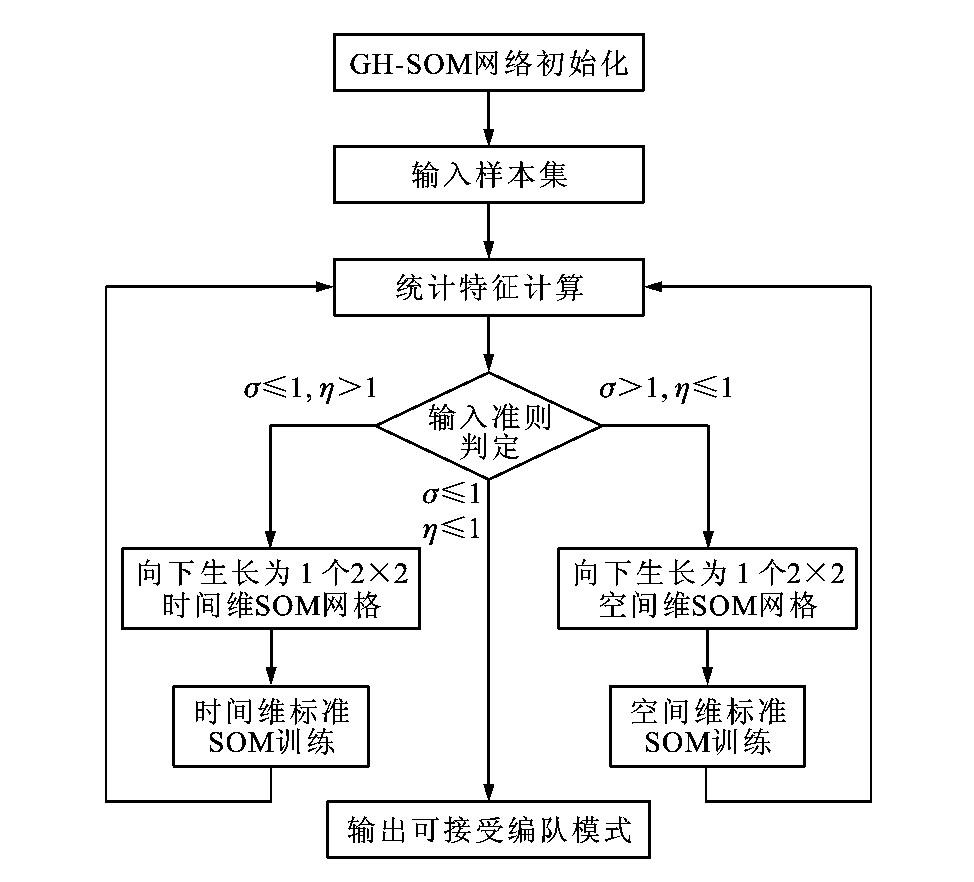
针对可接受航班编队调度优化问题, 从最大当量航程约束和最大允许延误约束出发, 推导出可接受编队模式的统计判别边界, 将编队调度优化问题转化为最优层次聚类问题, 利用改进的层次生长型自组织映射(GH-SOM)神经网络实现对可接受编队调度聚类的递归求精。仿真结果表明: 与经验判别边界相比, 基于可接受编队统计判别边界的识别量提高了92.14%, 平均扁率和平均时间同步偏差分别降低了25.00%和26.23%, 扁率标准差和时间同步偏差标准差分别降低了12.50%和18.75%;与自组织映射、标准GH-SOM相比, 基于改进GH-SOM的识别量分别提高了303.49%、162.87%, 平均扁率分别降低了34.25%、22.58%, 平均时间同步偏差分别降低了47.06%、36.62%, 扁率标准差分别降低了45.10%、6.67%, 时间同步偏差分别降低了46.94%、3.70%, 因此, 可接受编队模式的统计判别边界与改进GH-SOM是有效性的。
更多>
2015, 15(6): 75-82.
doi:
10.19818/j.cnki.1671-1637.2015.06.010
摘要
(
631
)
HTML
(
93
)
PDF (1449KB)
(
566
)
引用
(
)
换道决策中的车辆速度估计模型
王畅
,
付锐
,
张琼
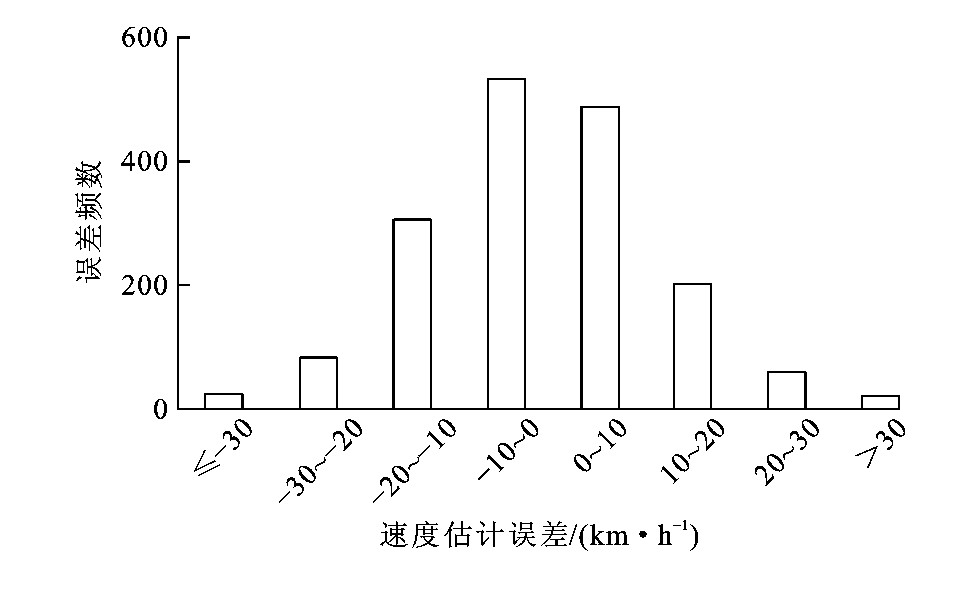
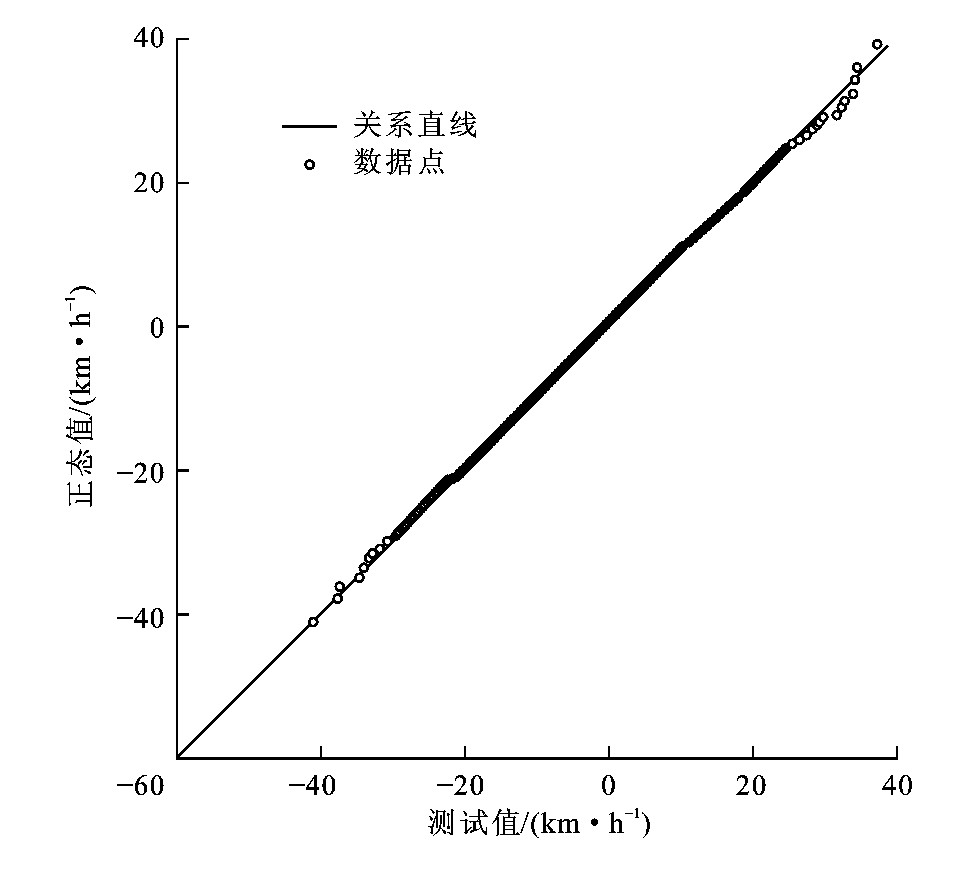
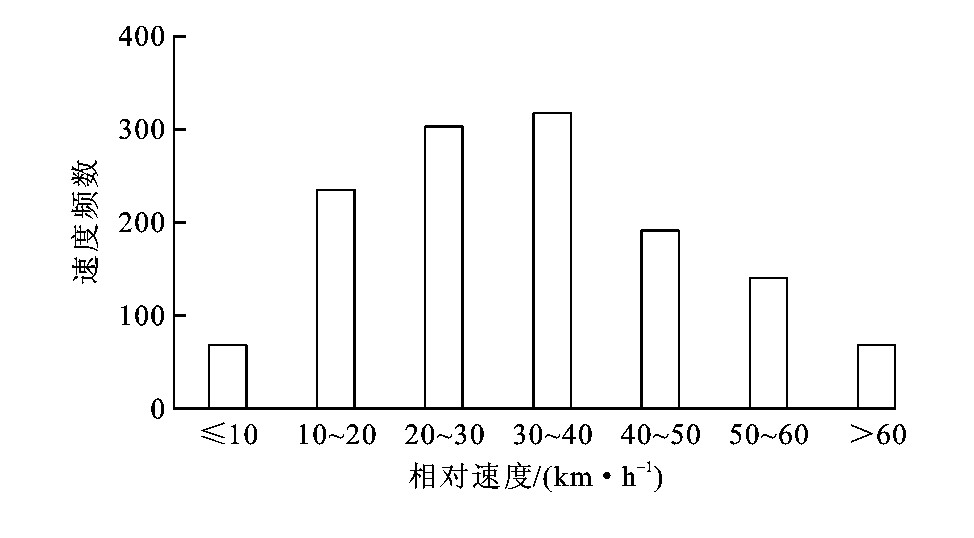
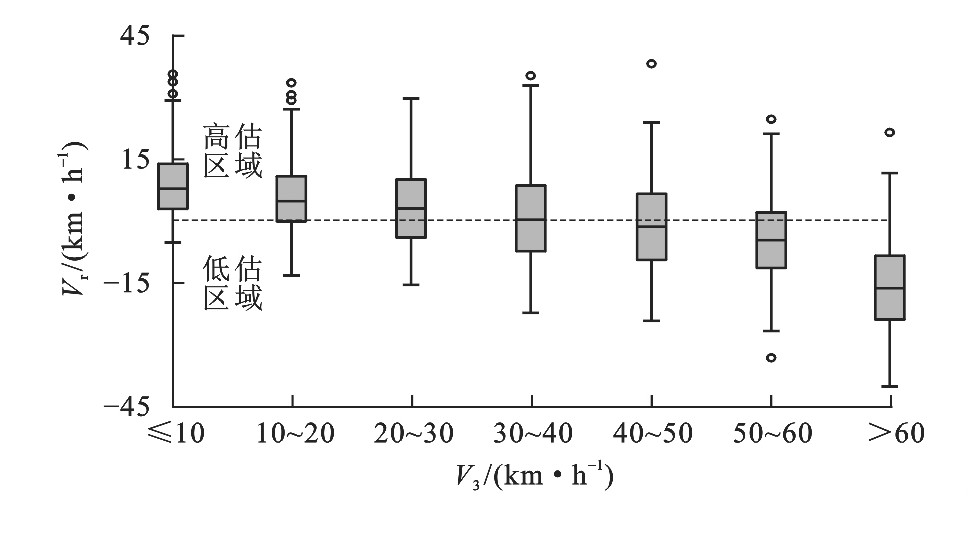
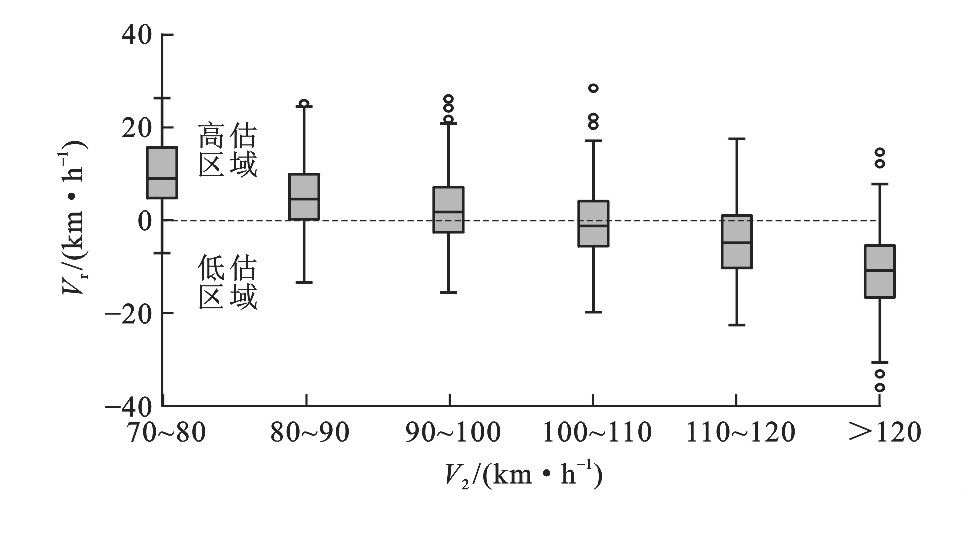
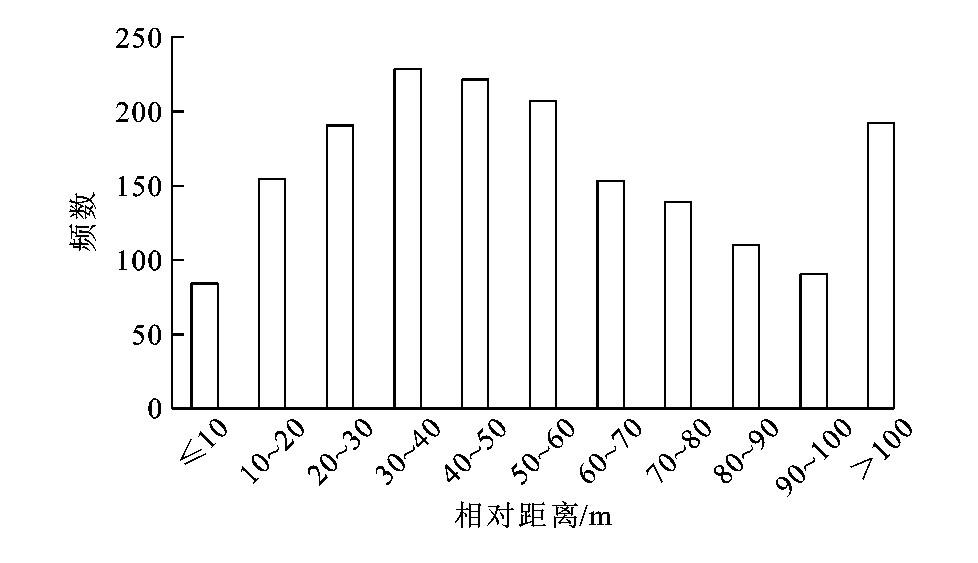
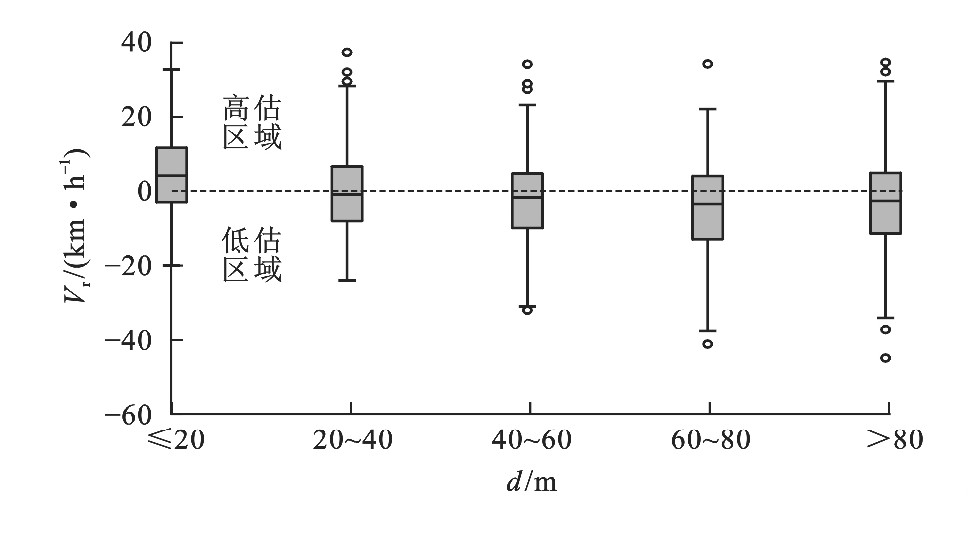
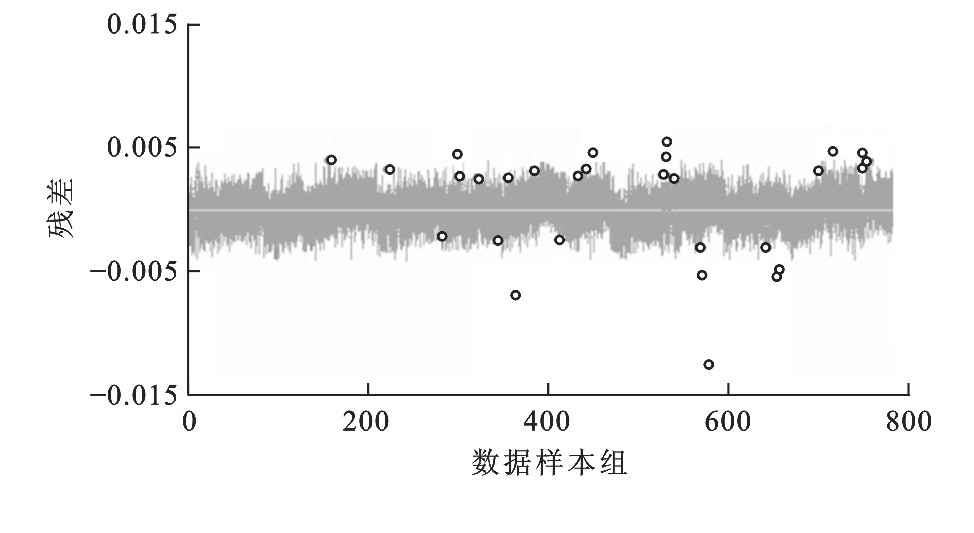
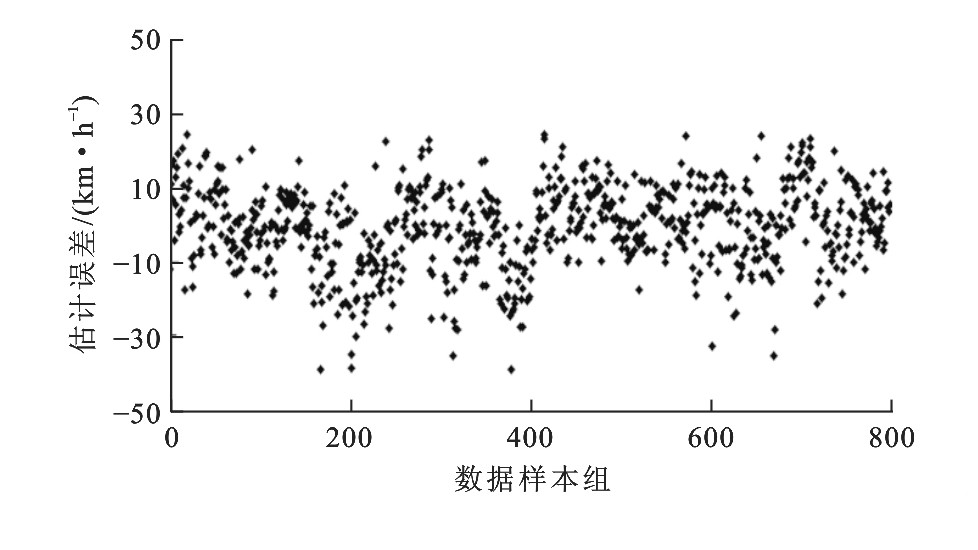
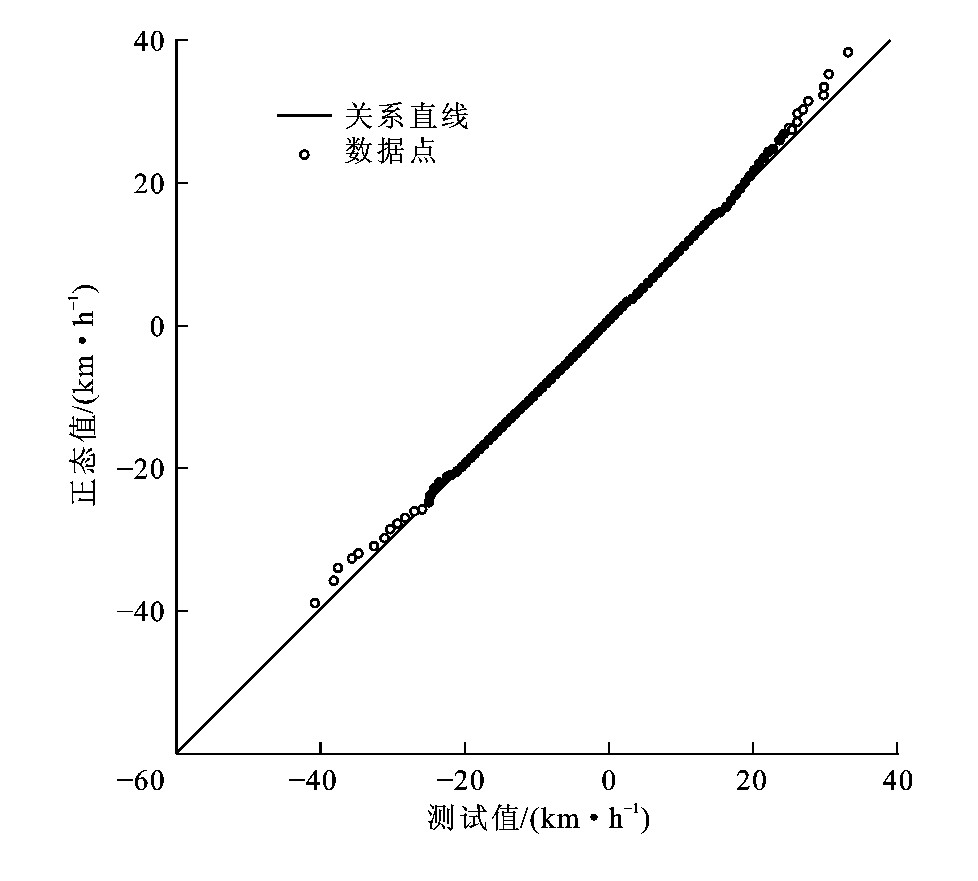
摘要:
为研究换道决策阶段驾驶人对后方车辆的速度感知特征, 以小型乘用车为平台, 利用毫米波雷达、车载总线数据仪、音视频监测系统等搭建了试验车。招募了15名驾驶人, 在某高速公路完成后方车辆速度估计试验, 试验车速度分别设置为60、70、80、90km·h
-1
, 最后获取了1 625组数据。采用显著性分析方法, 分析了相对速度、后方车辆速度与相对距离对驾驶人速度估计行为的影响特性。利用多元线性回归理论建立了驾驶人速度估计模型, 并对模型进行了检验。分析结果表明: 约60%的速度估计误差绝对值不大于10km·h
-1
, 且驾驶人的速度估计误差满足正态分布; 驾驶人速度估计误差随两车相对速度和后方车辆速度的增大而减小, 相对速度和后方车辆速度较低时, 易高估后方车辆速度, 相对速度和后方车辆速度较高时, 易低估后方车辆速度; 随两车相对距离的增大, 驾驶人速度估计误差变化趋势不显著, 但两车相对距离较小时, 驾驶人易高估后方车辆速度; 速度估计模型的平均误差为-0.56km·h
-1
, 因此, 估计结果可靠。
更多>
2015, 15(6): 83-91.
doi:
10.19818/j.cnki.1671-1637.2015.06.011
摘要
(
756
)
HTML
(
144
)
PDF (975KB)
(
768
)
引用
(
)
交通信息工程及控制
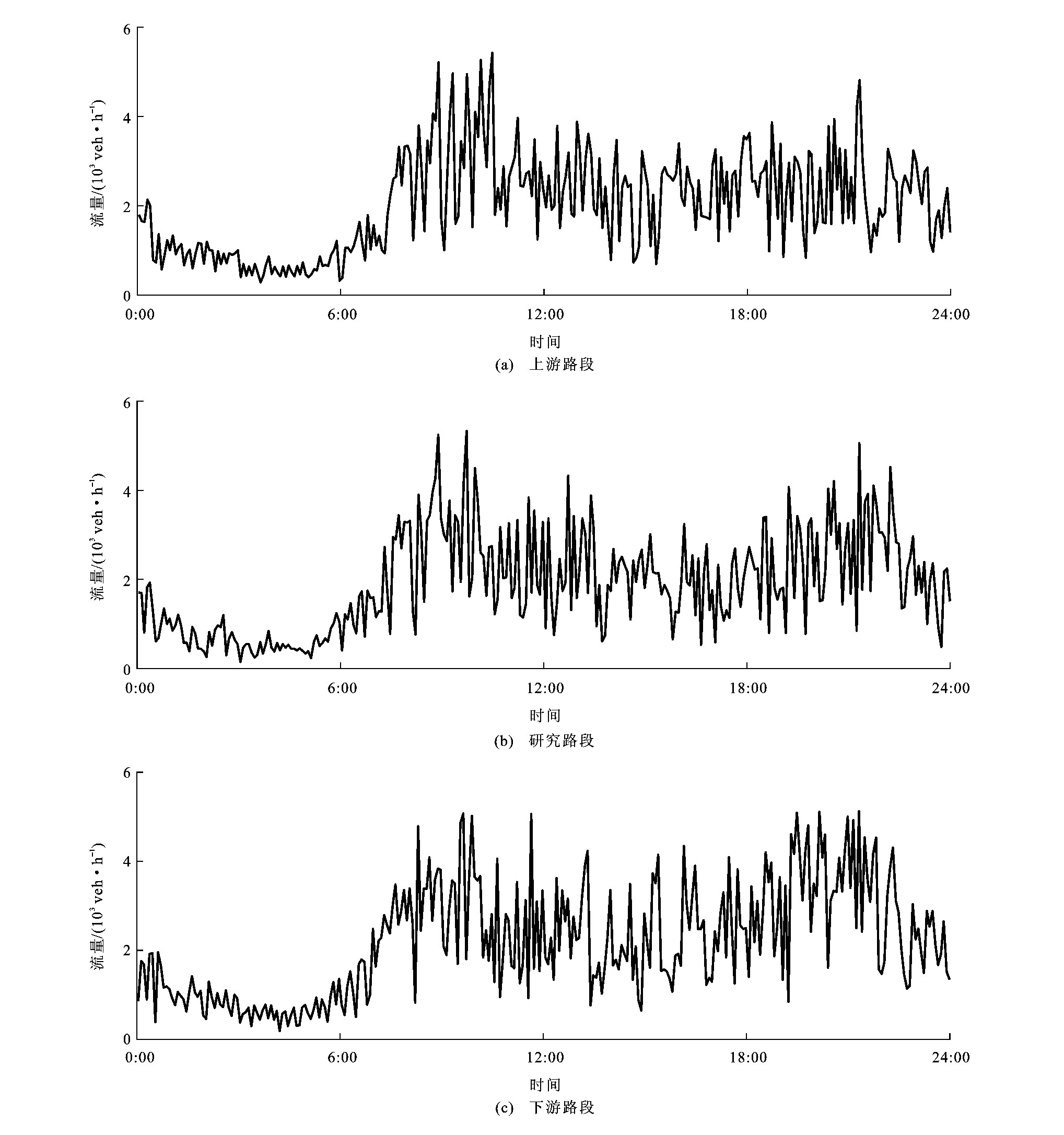
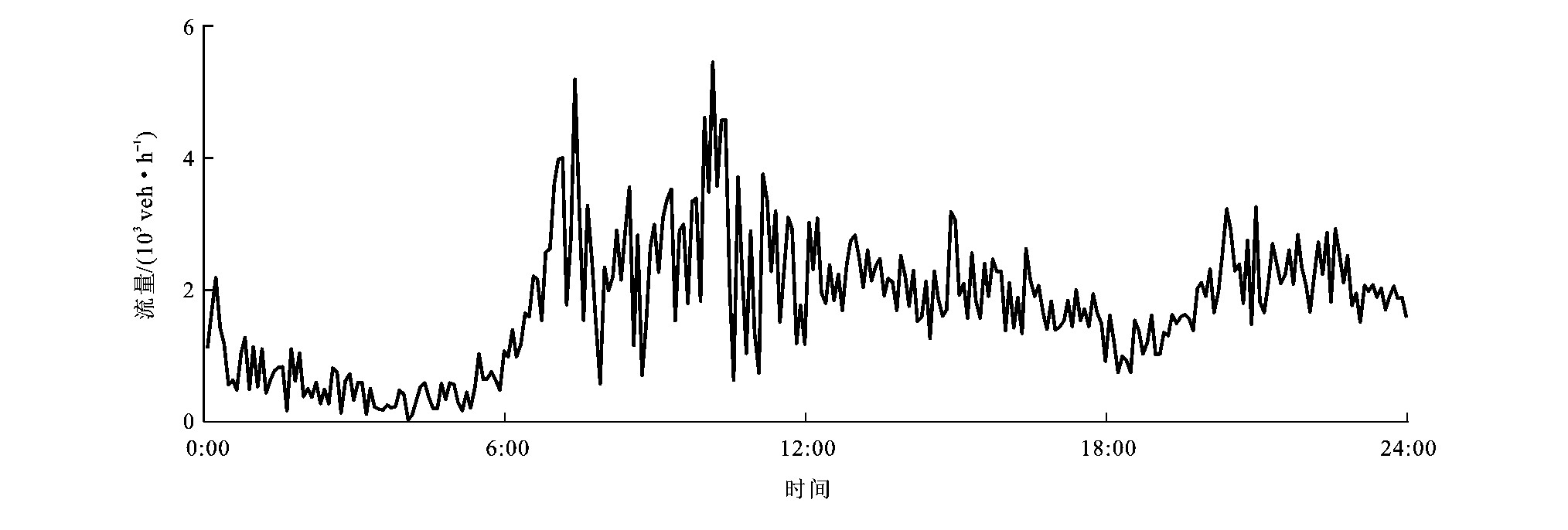
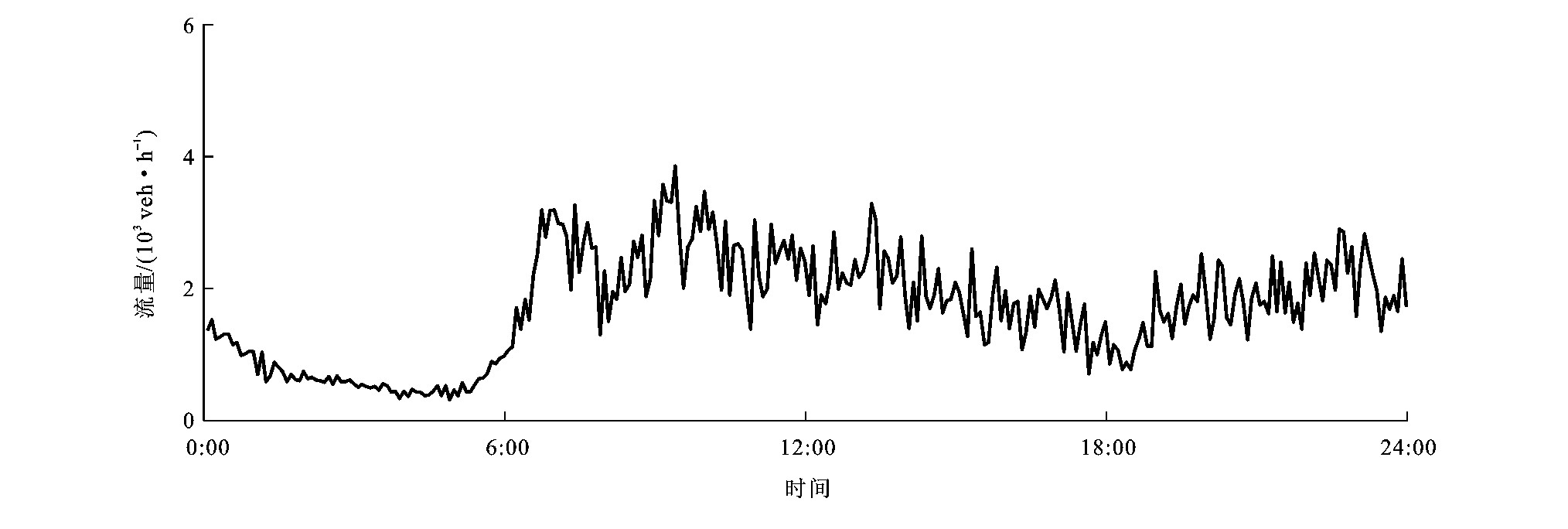
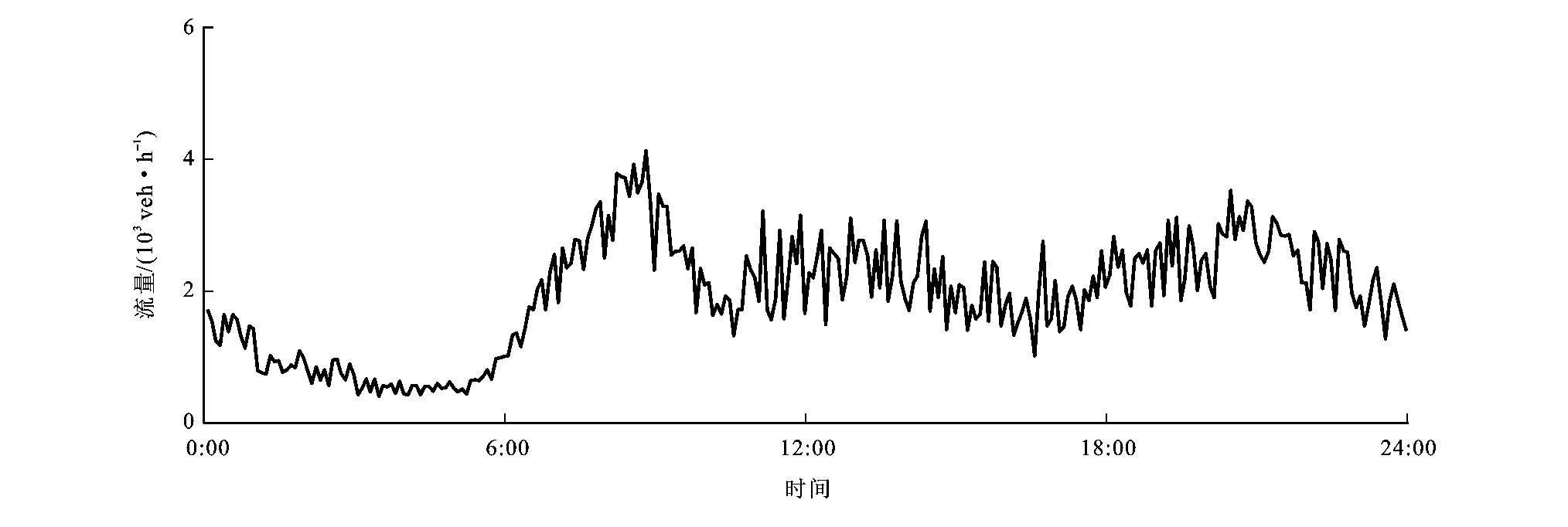
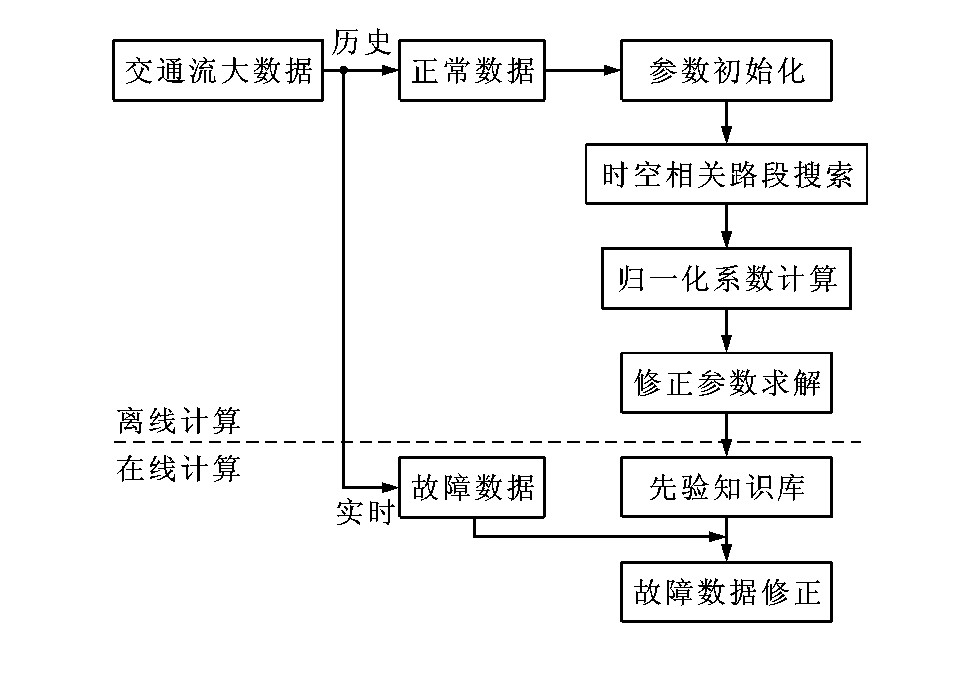
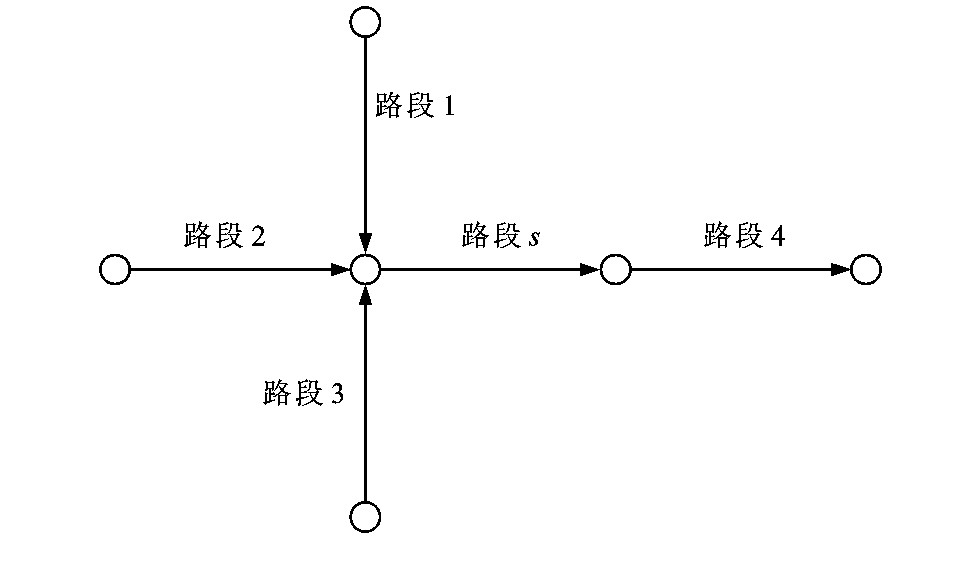
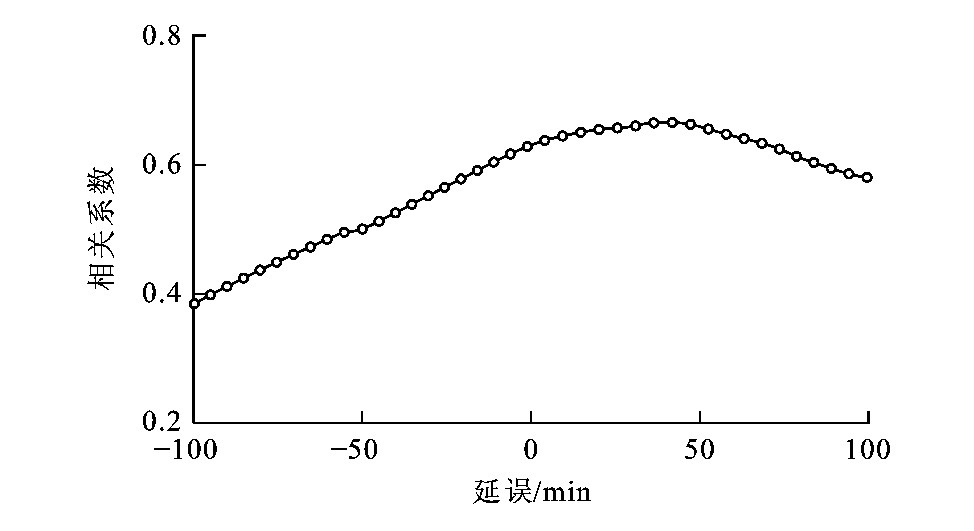
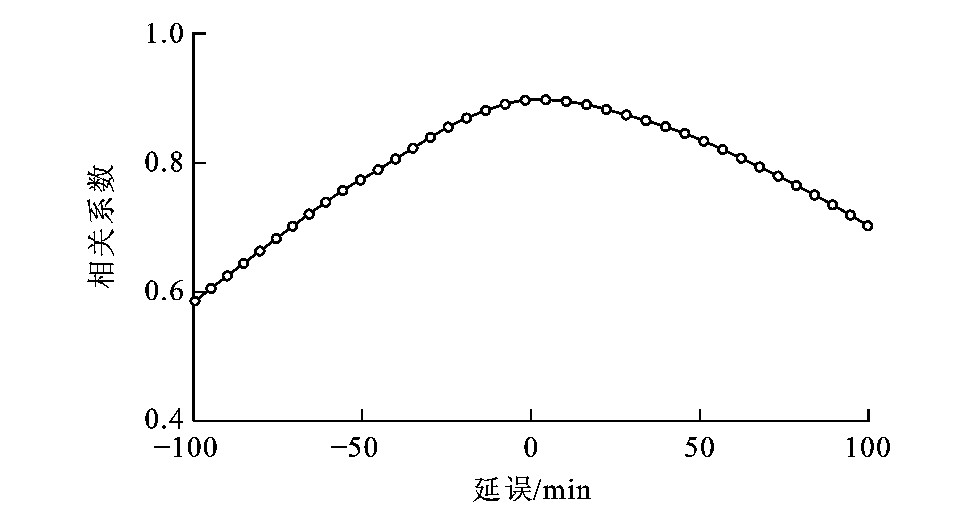
基于时空模型的交通流故障数据修正方法
陆化普
,
孙智源
,
屈闻聪
摘要:
为了提高交通流数据的准确性, 从时间相关性、空间相关性和历史相关性三方面分析了交通流大数据的特点, 建立了基础交通流时空模型。为保证数据处理的精度和速度, 进行了时空模型的简化和标定。将时空模型简化, 抽象为双层规划模型, 上层模型通过控制时空相关参数的数量实现运算速度的优化, 下层模型通过控制误差实现计算精度的优化。应用数据驱动法进行双层规划模型的求解, 完成时空模型的标定。在时空模型的基础上, 提出了交通流故障数据修正方法。以北京市某路段为例, 对交通流故障数据修正方法进行有效性和可行性验证。验证结果表明: 基于历史趋势、空间相关与时间序列的交通流故障数据修正方法的精度分别为79.65%、85.16%、89.84%, 基于时空模型的交通流故障数据修正方法的精度为90.91%, 具有较高的精度, 而且可准确描述交通流大数据的特点。
更多>
2015, 15(6): 92-100.
doi:
10.19818/j.cnki.1671-1637.2015.06.012
摘要
(
718
)
HTML
(
146
)
PDF (814KB)
(
849
)
引用
(
)
过饱和交叉口交通信号控制动态规划优化模型
李瑞敏
,
唐瑾
摘要:
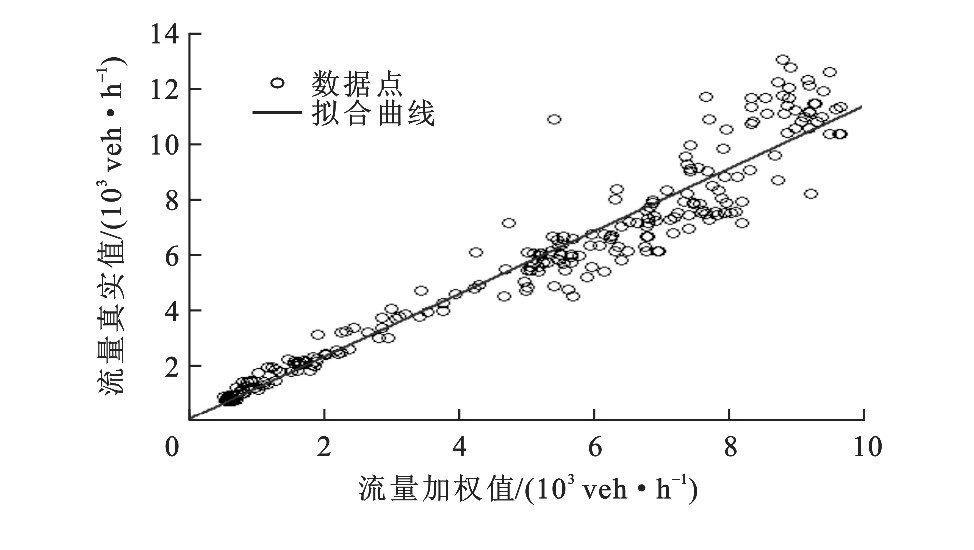
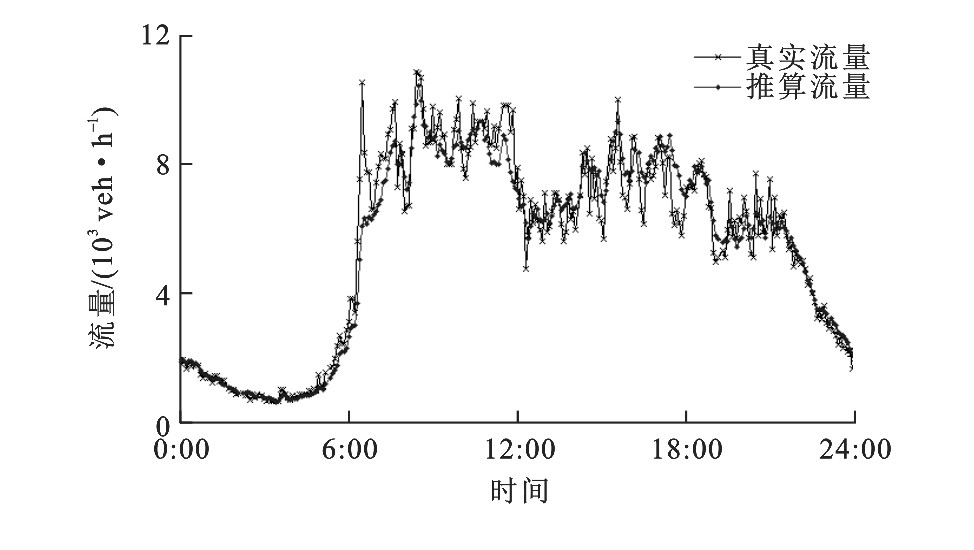
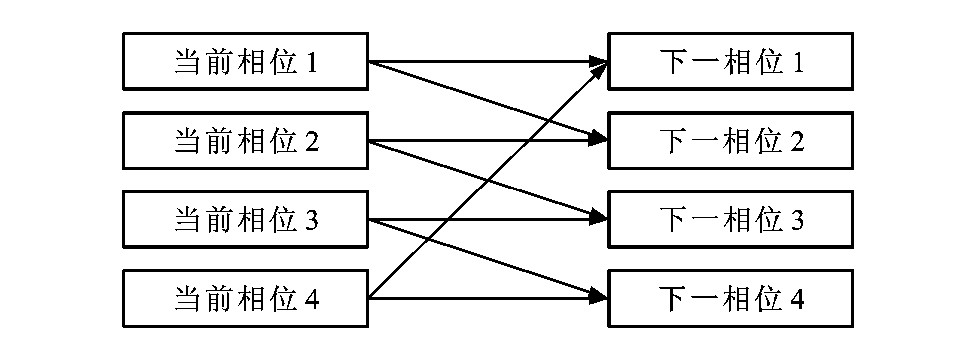
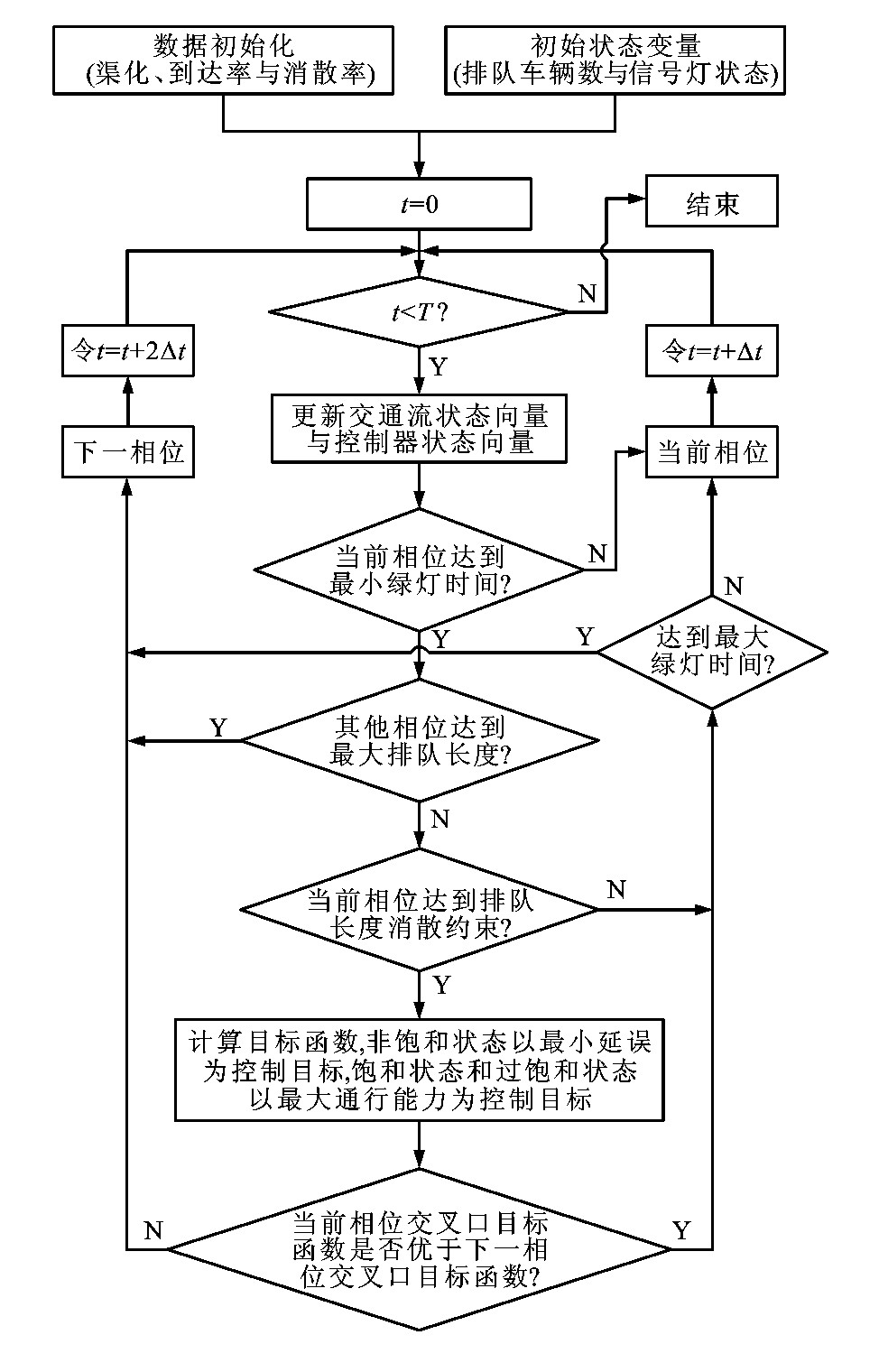
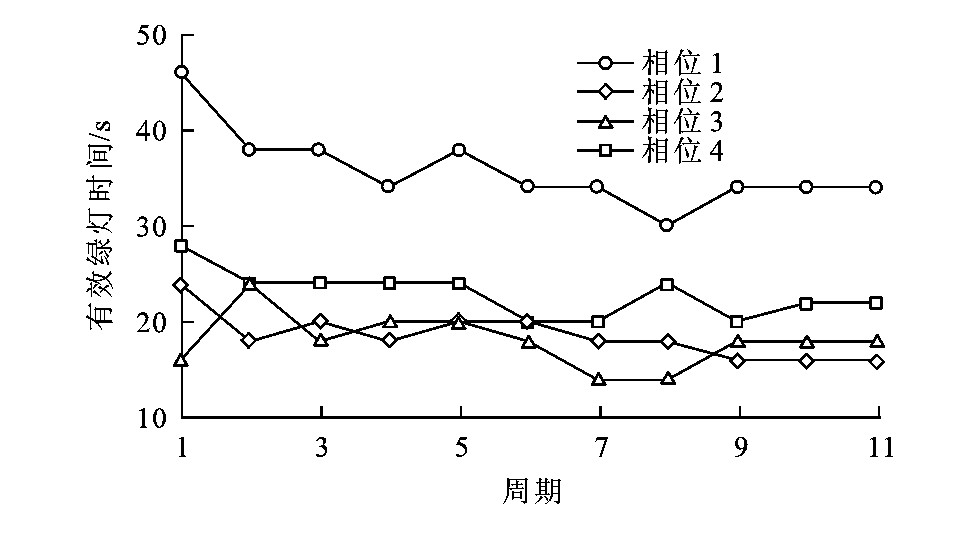
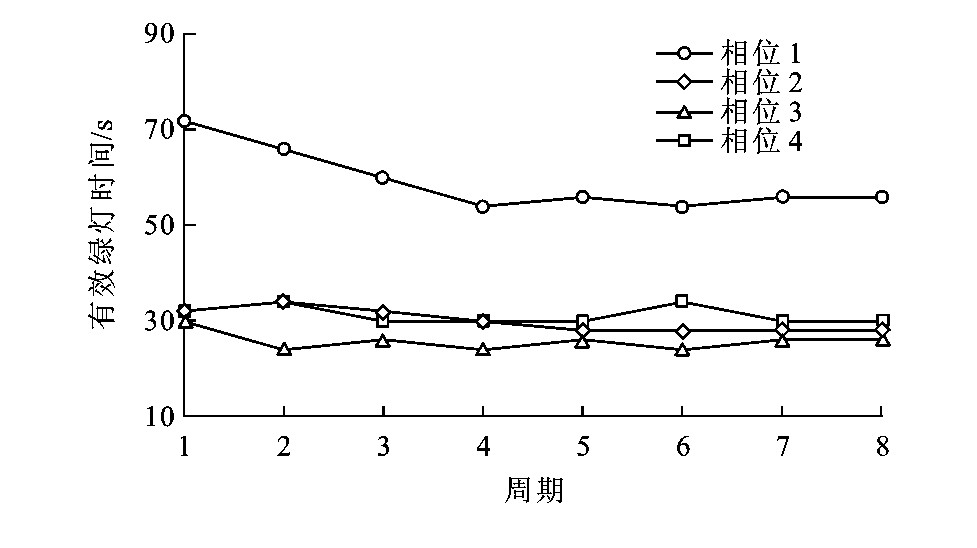
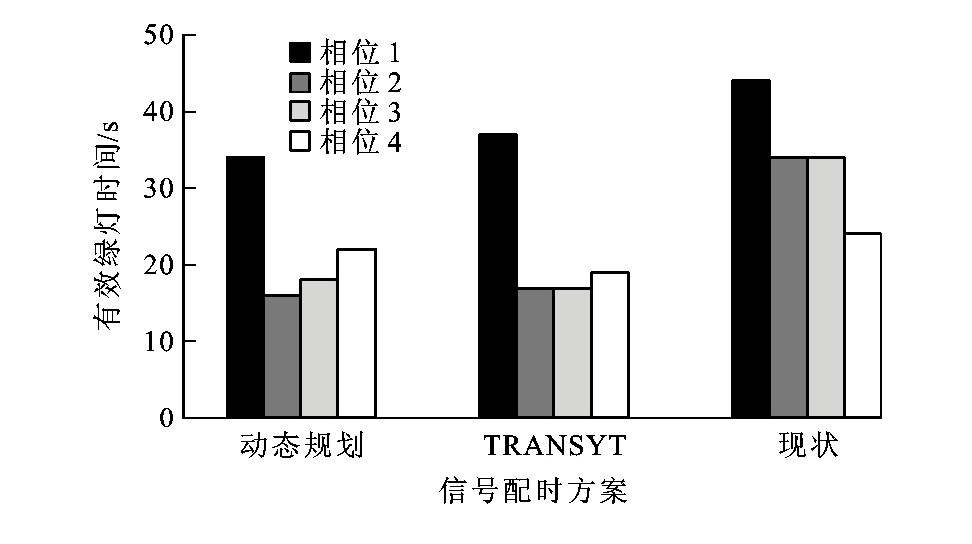
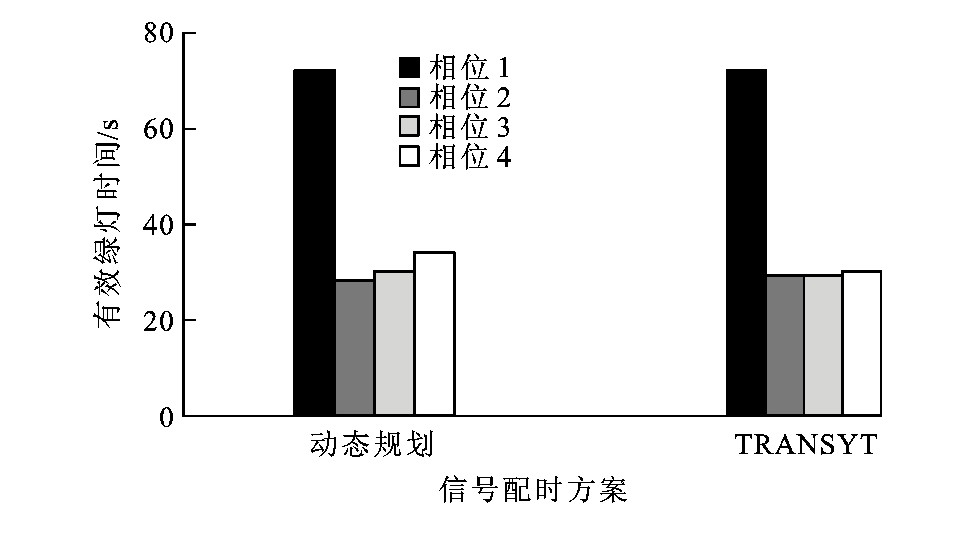
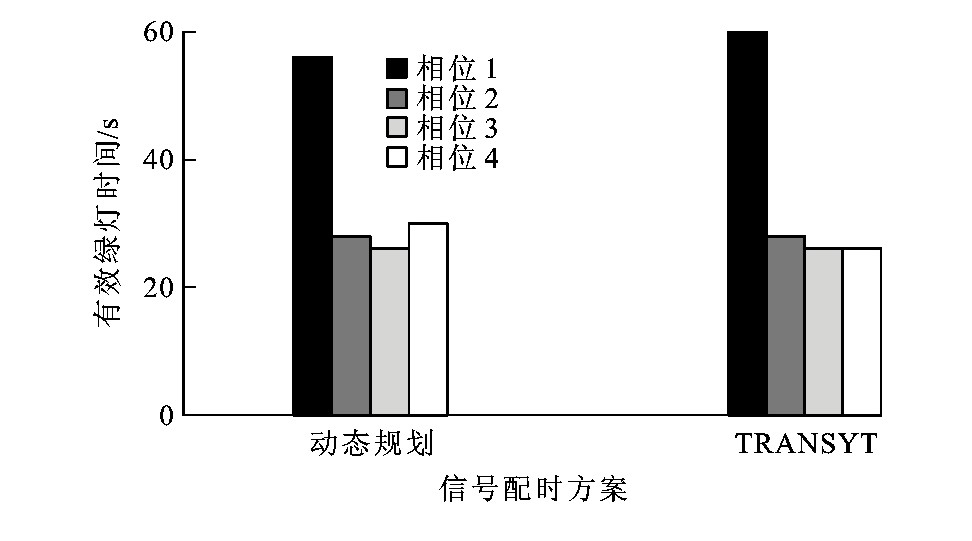
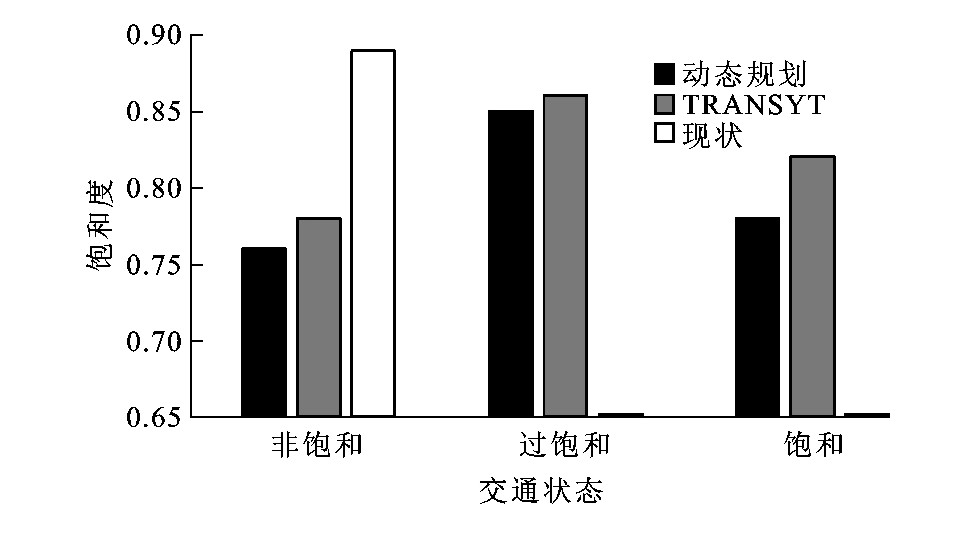
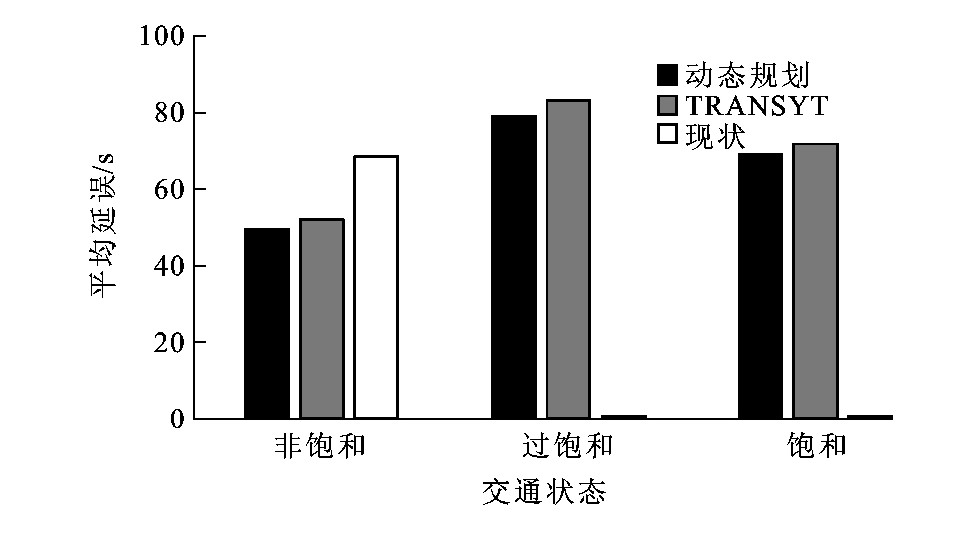
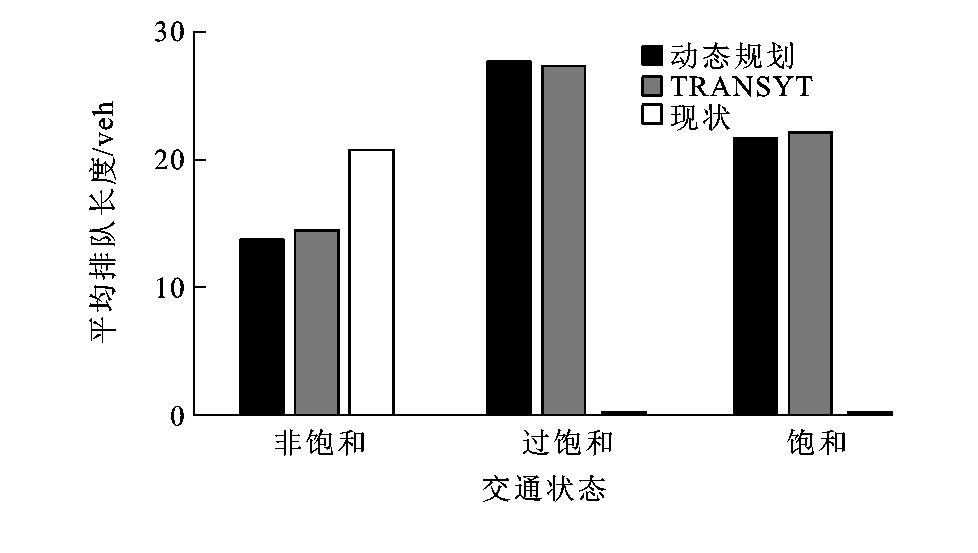
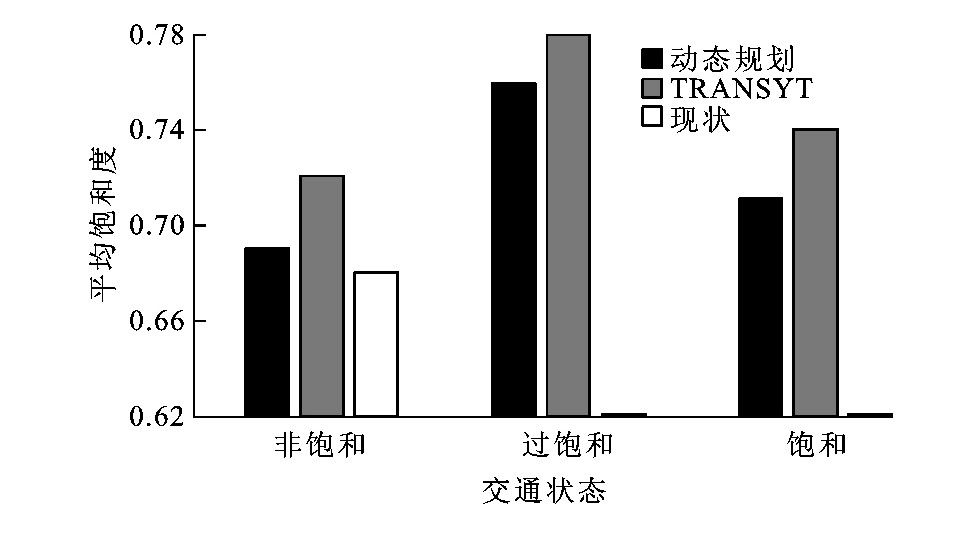
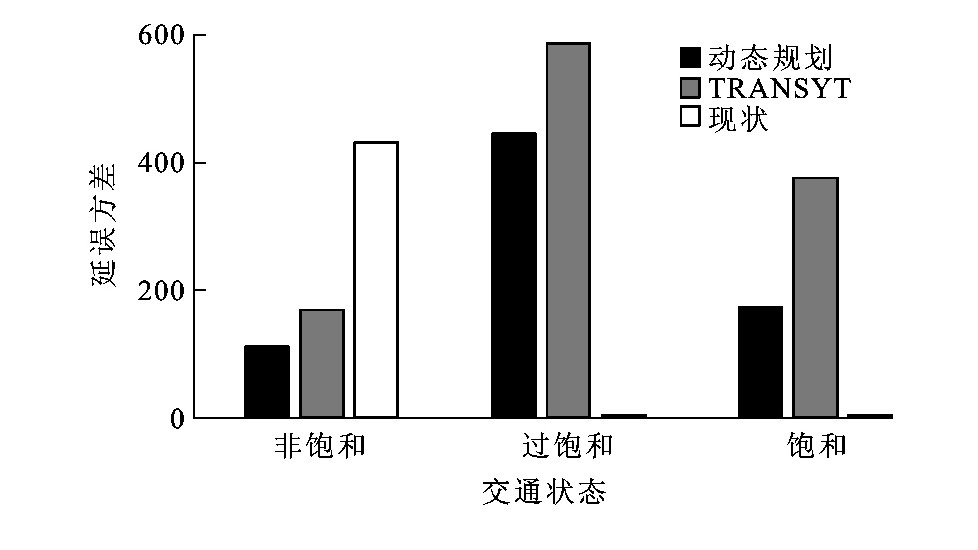
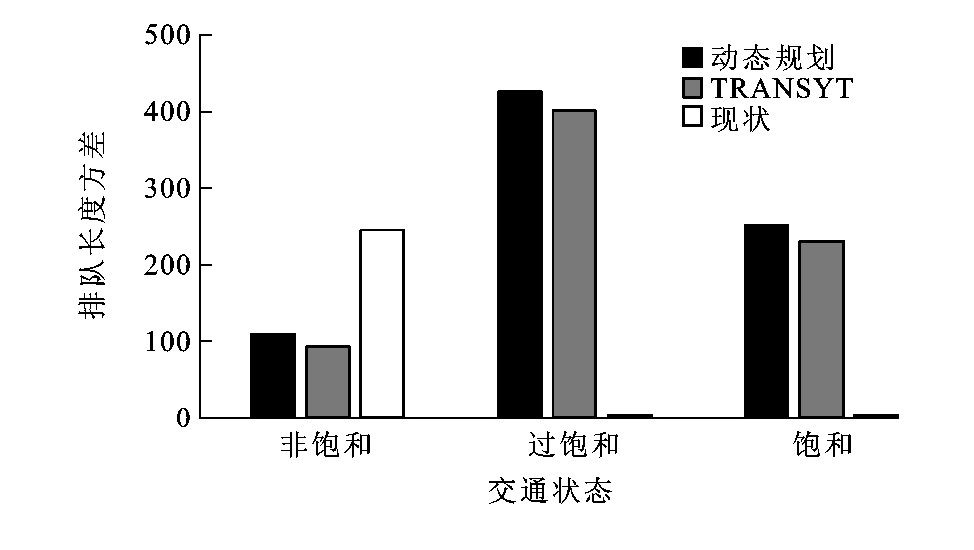
为满足过饱和交叉口信号控制的需求, 应用动态规划理论, 建立了过饱和交叉口信号控制优化模型, 界定了模型的阶段、状态变量和决策变量, 推导了平均排队长度状态转移方程和控制器状态转移方程, 确定了基于交叉口不同饱和状态的目标函数与约束条件, 提出了模型优化框架。非饱和状态以最小化延误为控制目标, 饱和状态和过饱和状态以最大化通行能力为控制目标。通过迭代运算判断保持或者切换当前相位, 并将控制效果实时反馈以调节下一阶段信号配时方案。以秦皇岛市某交叉口为例, 基于实际采集数据得到了非饱和、饱和与过饱和3种状态的交通流量, 应用动态规划模型获得配时方案, 并与TRANSYT方法给出的配时方案进行了对比分析。分析结果表明: 在非饱和状态下, 采用动态规划模型计算的平均延误、饱和度、平均排队长度分别为49.3s、0.76、13.7veh, 采用TRANSYT方法计算的对应值分别为52.0s、0.78、14.4veh; 在过饱和状态下, 采用动态规划模型计算的饱和度与平均延误分别为0.85、78.5s, 采用TRANSYT方法计算的对应值分别为0.86、82.5s, 但对应的平均排队长度为27.3veh, 略优于动态规划模型的27.6veh; 饱和状态控制效果与过饱和状态控制效果类似。可见, 采用动态规划模型可以有效降低交叉口饱和度, 减少各相位不同进口道车辆的平均延误。
更多>
2015, 15(6): 101-109.
doi:
10.19818/j.cnki.1671-1637.2015.06.013
摘要
(
1056
)
HTML
(
212
)
PDF (1105KB)
(
1089
)
引用
(
)
城市可变信息标识选址算法
四兵锋
,
陈伯阳
,
蒋明清
,
杨小宝
摘要:
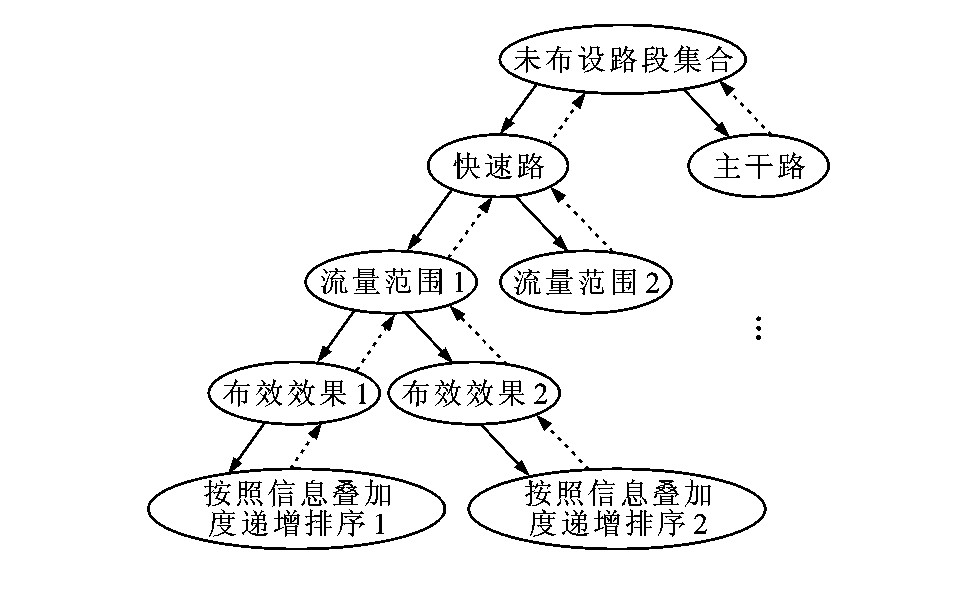
考虑了道路等级、交通流量与道路运行状态等静态因素, 以及信息叠加特征的动态因素; 提出了一种考虑路段属性的城市可变信息标识(VMS)选址算法, 运用回溯法的思想, 针对与交通诱导密切相关的4个主要路段属性, 包括道路等级、交通流量、布设效果与信息叠加度, 对路段进行多层次筛选; 引入2个参数, 分别为路段交通流量和布设效果的遍历范围, 通过调整这2个参数, 控制不同属性之间的重要程度; 基于北京市某局部路网对算法进行了验证。验证结果表明: 当这2个引入参数由0.3增大到0.6时, 布设路段顺序会发生改变, 等级较高的路段即使交通流量较小也会得到优先布设, 处于同一交通流量区间的路段, 布设效果大的路段优先布设; 在实际应用中, 如果要求VMS多布设在等级较高的路段上, 可以通过调整算法参数而进行布设顺序的调整。
更多>
2015, 15(6): 110-117.
doi:
10.19818/j.cnki.1671-1637.2015.06.014
摘要
(
644
)
HTML
(
191
)
PDF (778KB)
(
636
)
引用
(
)
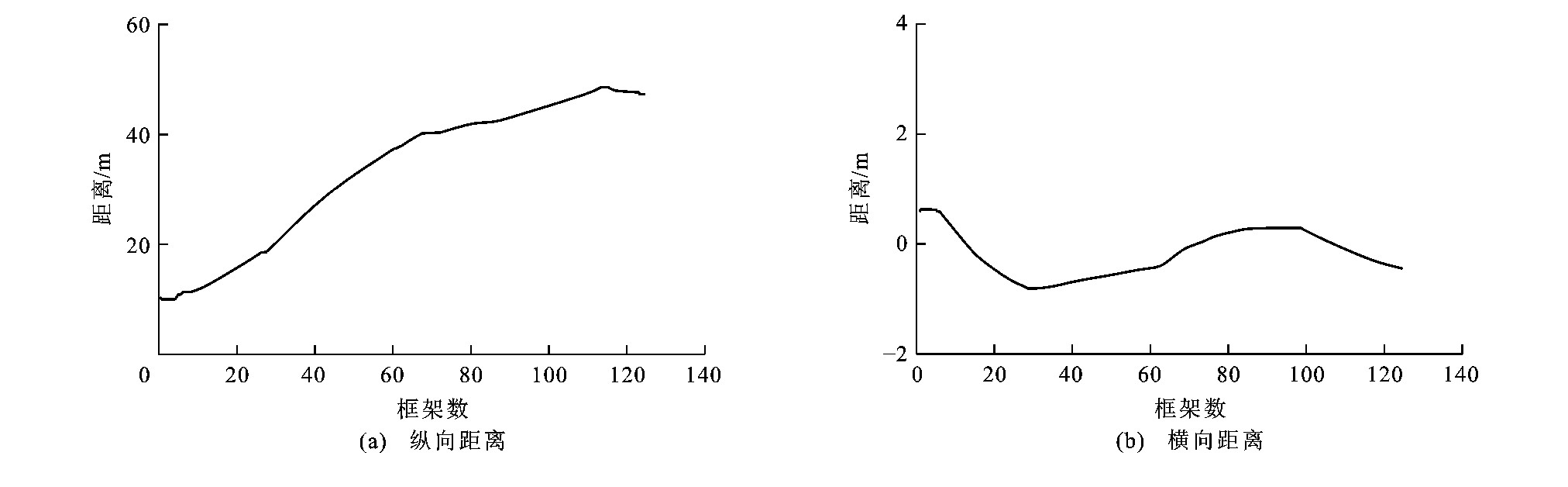
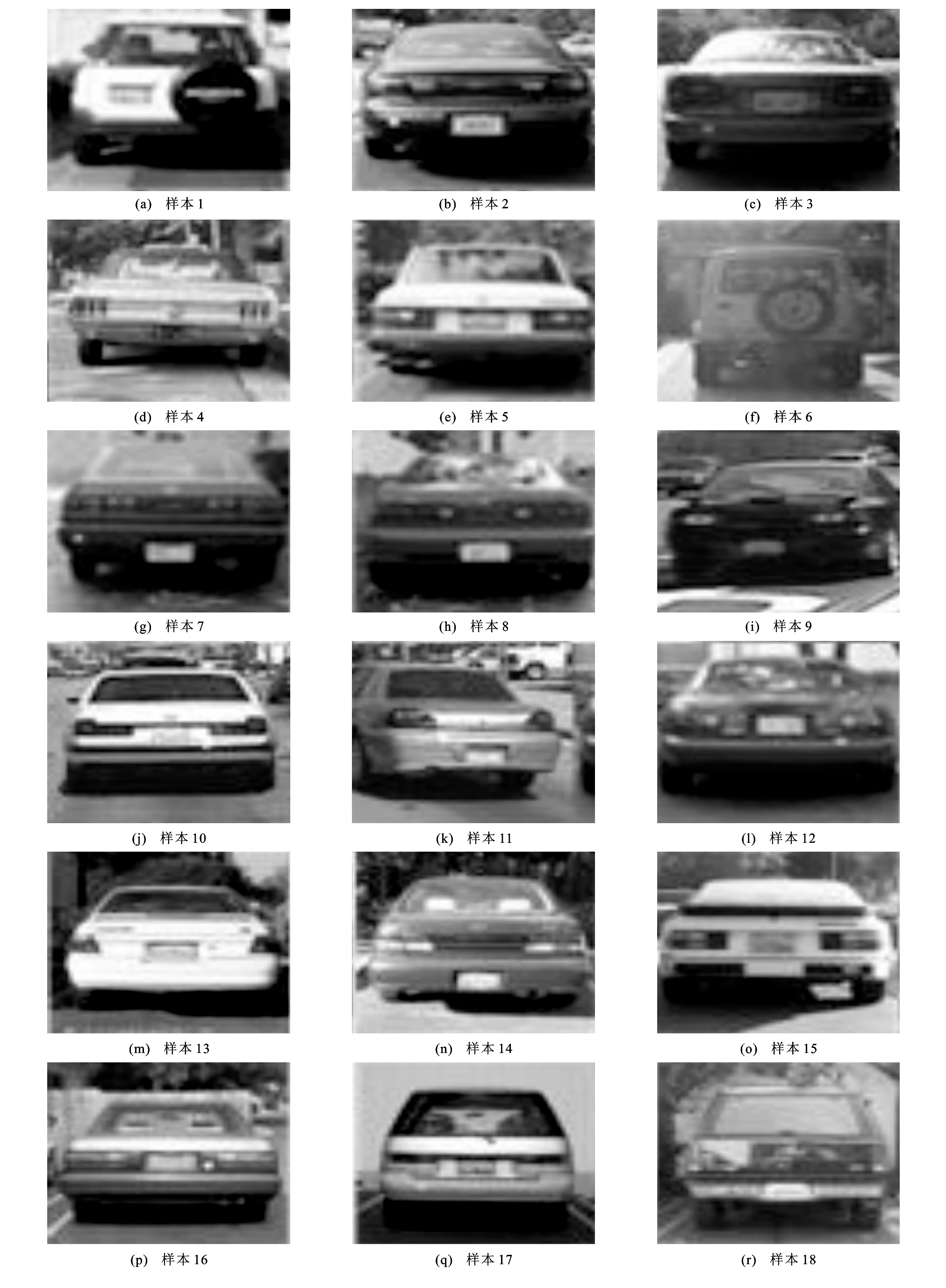
基于单双目视觉融合的车辆检测和跟踪算法
蔡英凤
,
王海
,
陈小波
,
江浩斌
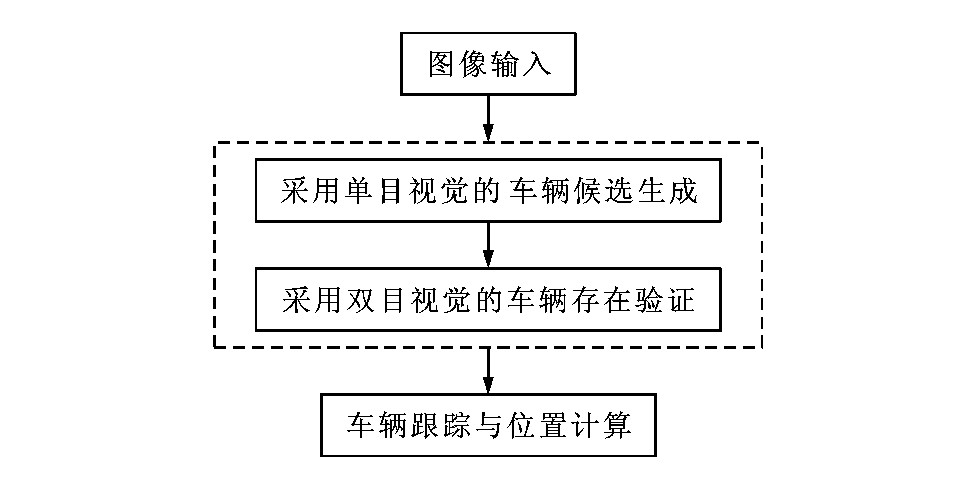
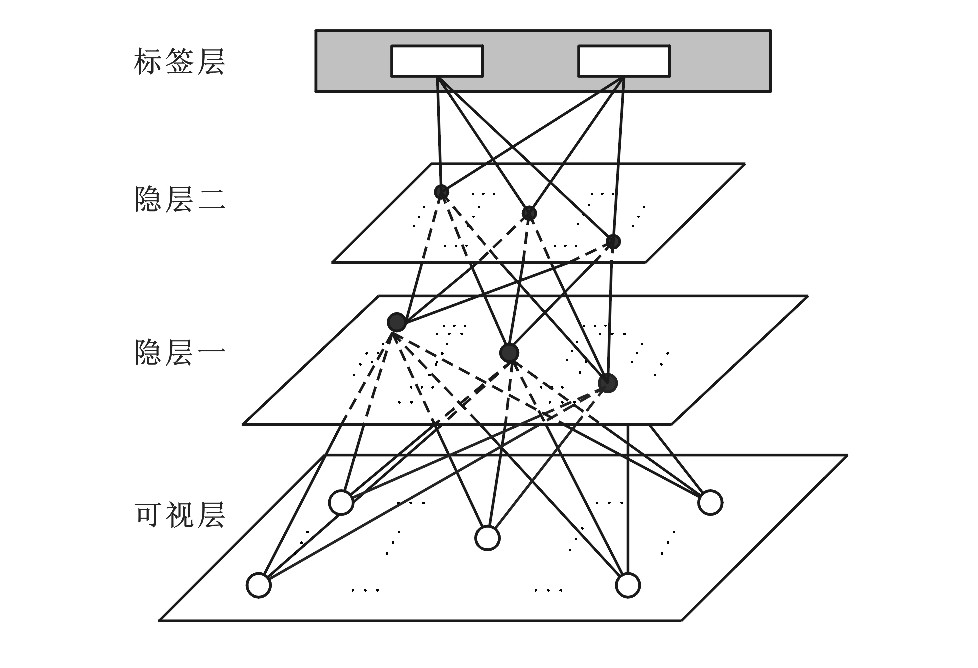
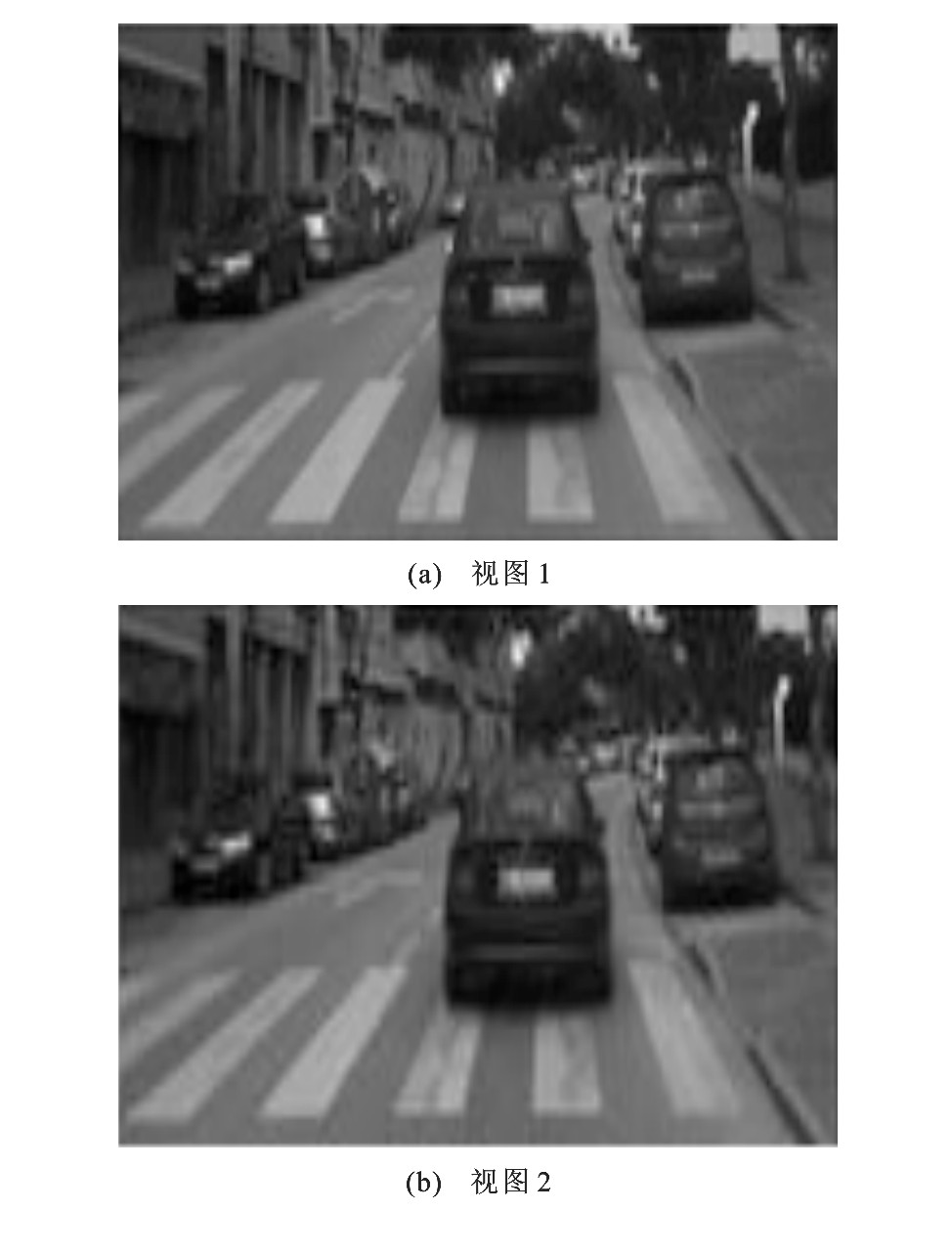
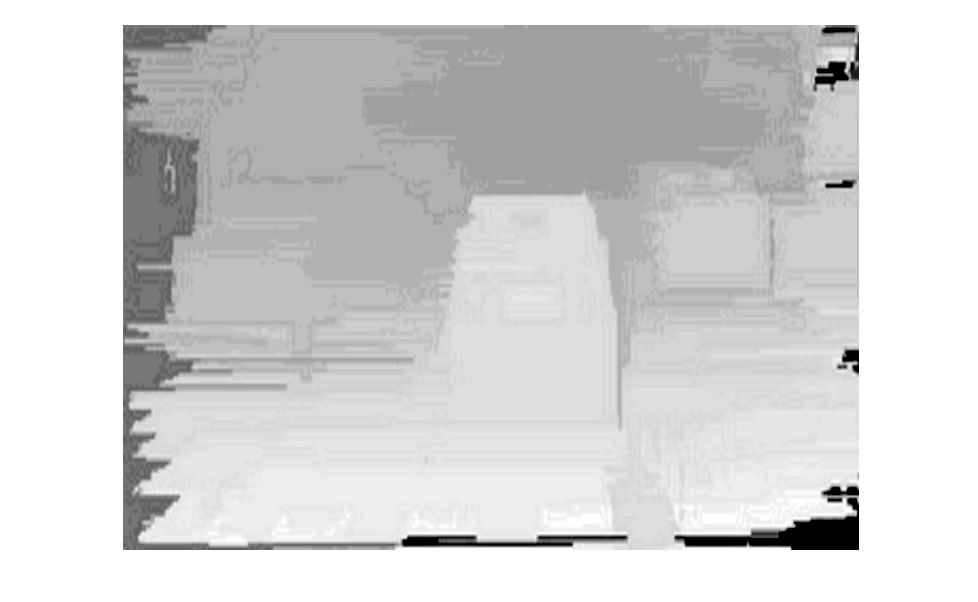
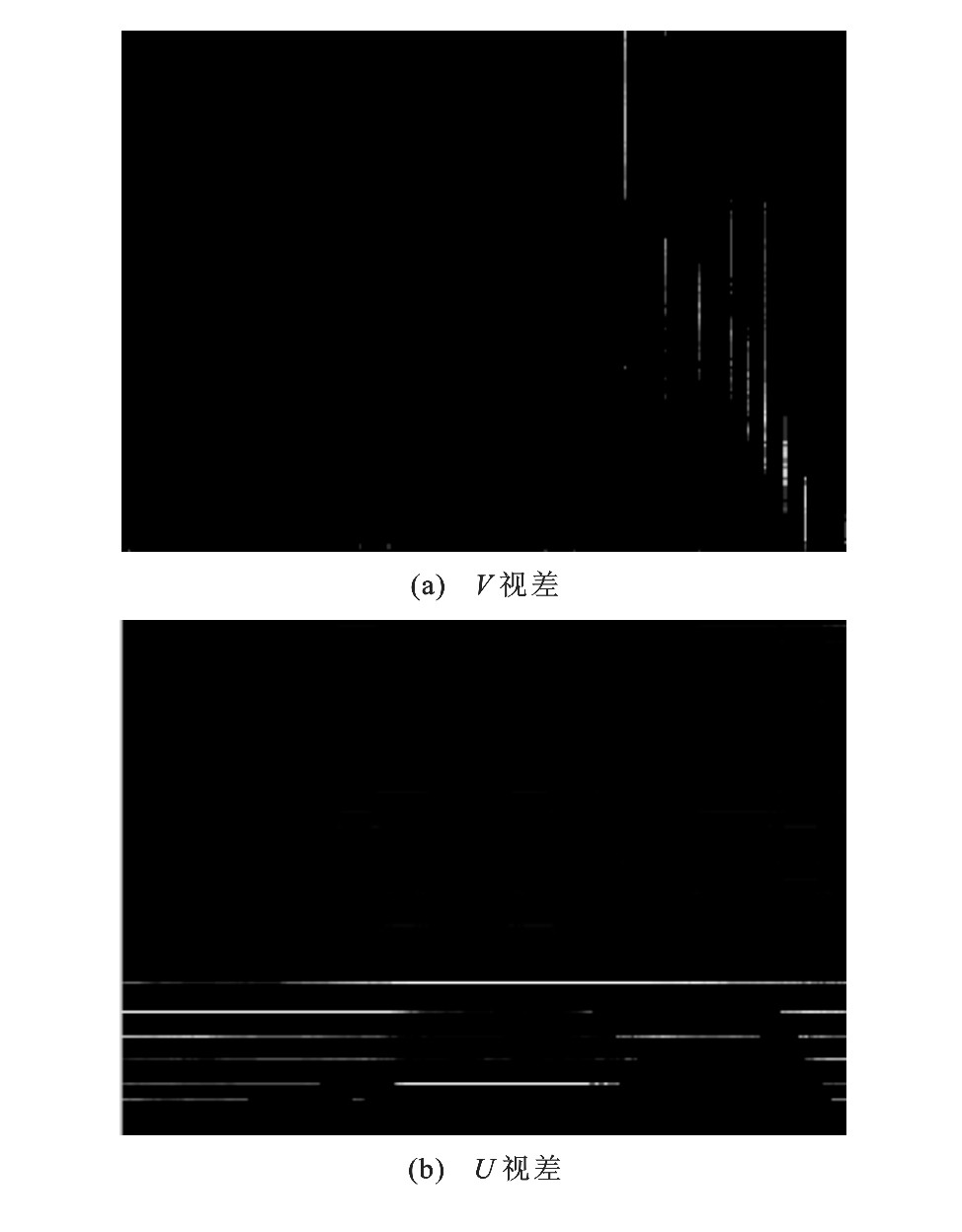
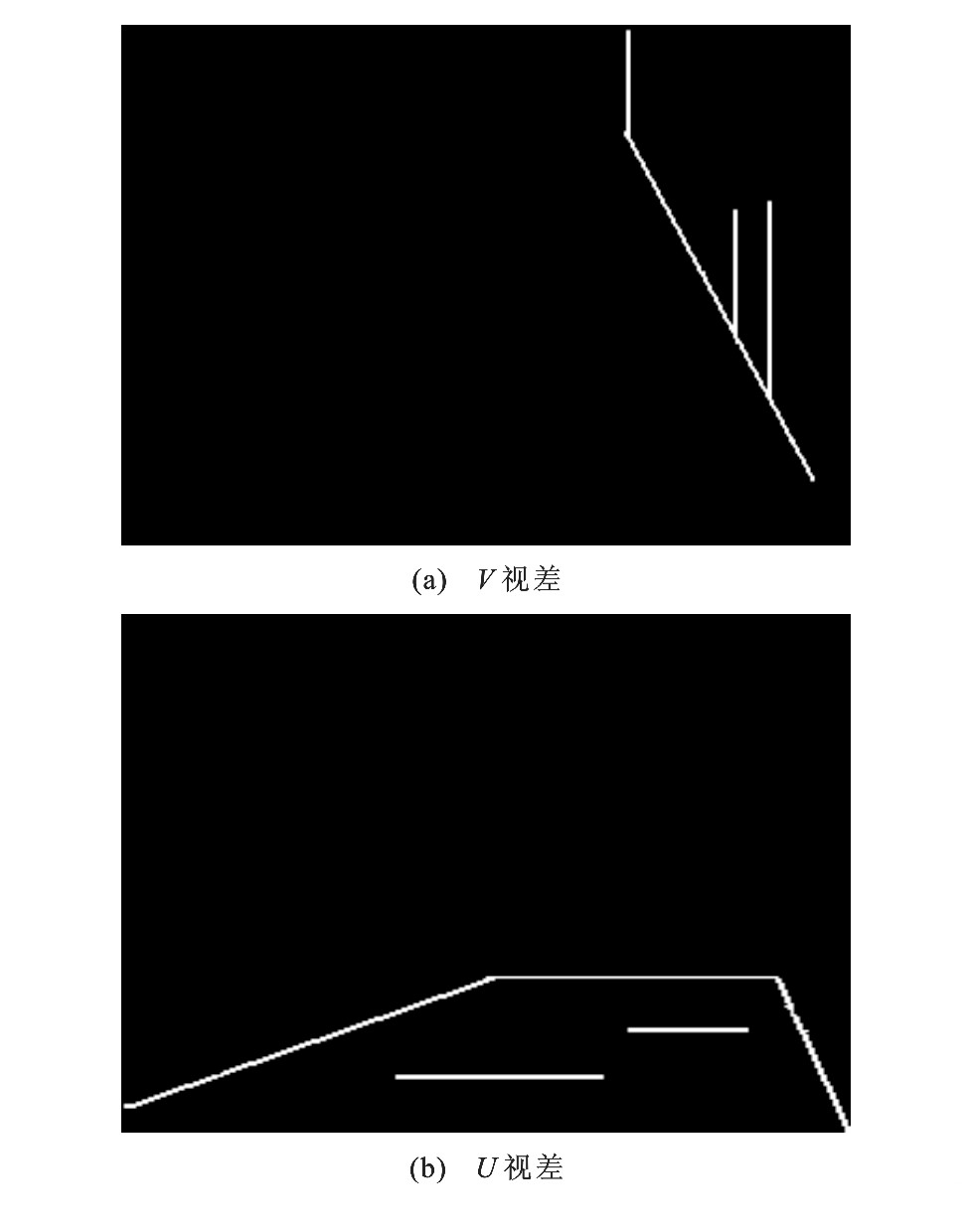
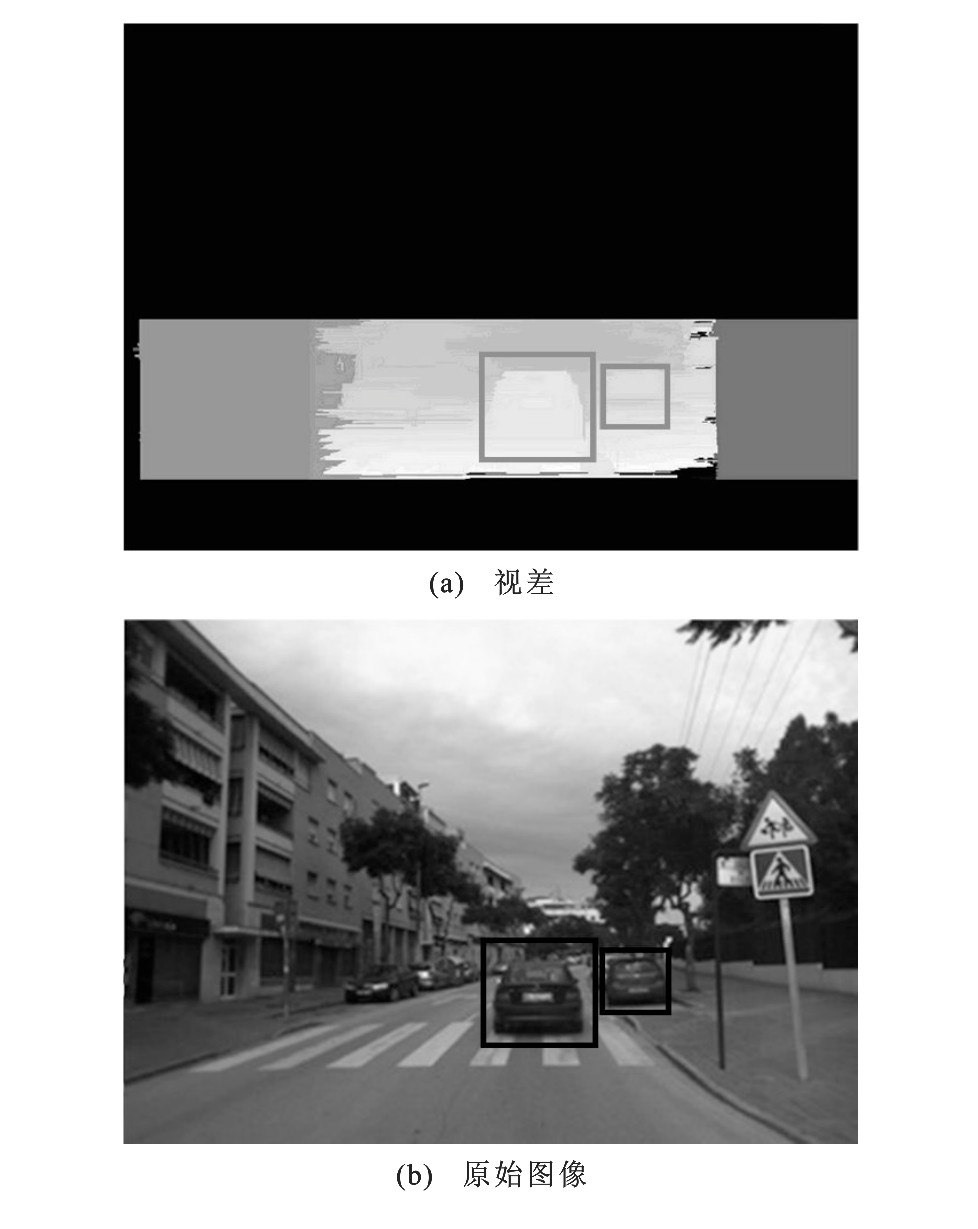
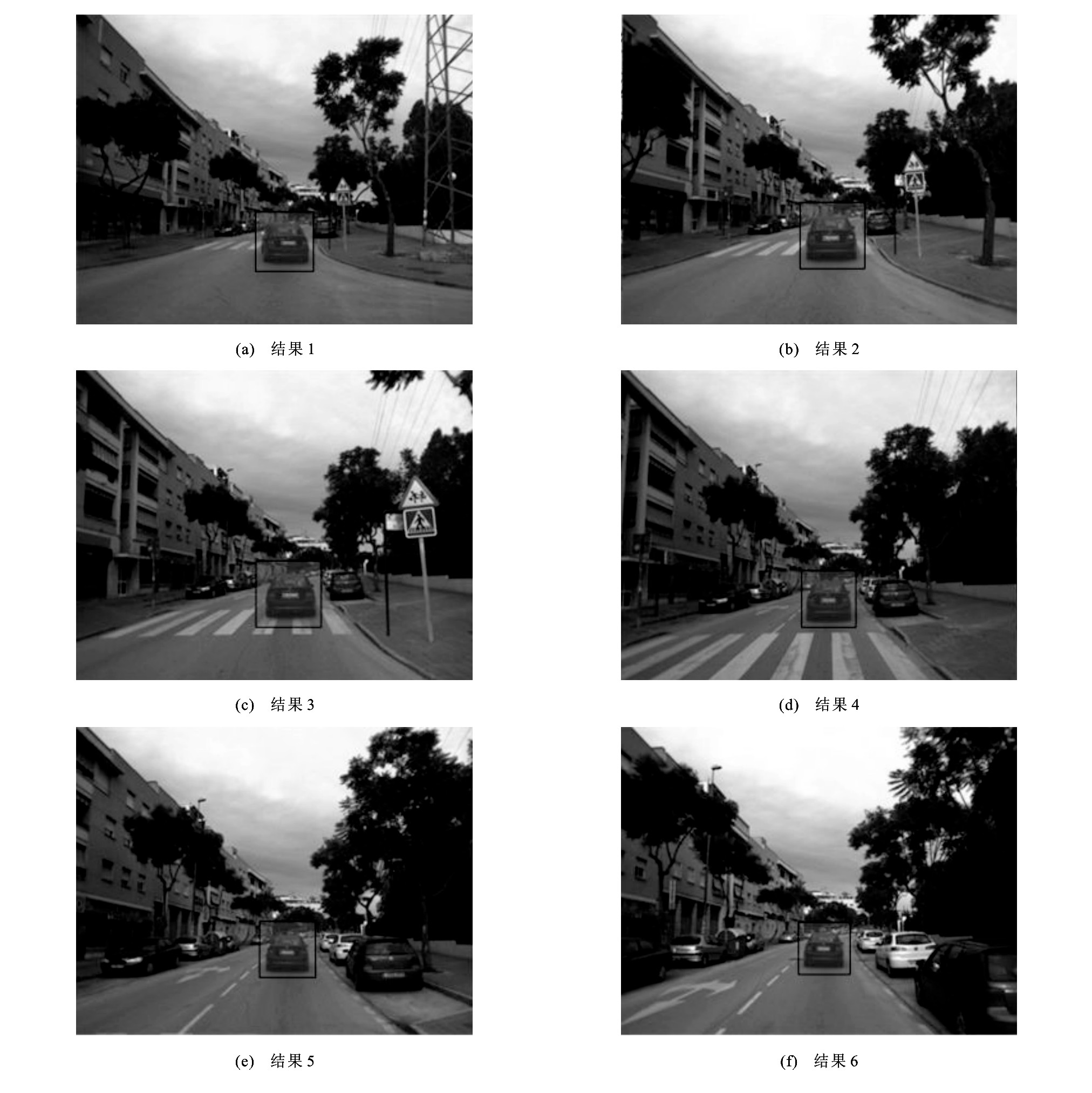
摘要:
提出了一种基于单双目视觉融合的车辆检测与基于Kalman滤波的车辆跟踪算法, 设计了一种基于二维深度置信网络的车辆检测器。在道路图像中利用单目视觉生成车辆可能存在的区域, 构成双目视觉处理的车辆候选集合。在车辆可能存在的区域内利用双目视觉进行误检去除, 并获得车辆的位置信息。在二维图像坐标系和三维世界坐标系内, 利用Kalman滤波器对检测到的车辆进行跟踪。试验结果表明: 算法的检测率为99.0%, 误检率为1.3×10
-4
%, 检测时间为57ms, 检测率高, 误检率低, 检测时间短; 与单双目视觉弱融合算法、单目视觉算法和双目视觉算法相比, 本文车辆检测与跟踪算法兼具双目视觉算法检测率高和单目视觉算法检测时间短的优点。
更多>
2015, 15(6): 118-126.
doi:
10.19818/j.cnki.1671-1637.2015.06.015
摘要
(
682
)
HTML
(
149
)
PDF (3259KB)
(
1257
)
引用
(
)
文章推荐
更多>
考虑充电需求的电动汽车行为策略研究综述
城市自行车交通系统出行品质评价方法综述
延缓高速列车制动盘热裂纹扩展的机理和关键技术综述
高速公路交通事故应急关键资源调配研究综述
乳化沥青冷再生混合料强度提升措施研究进展
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
《交通运输工程学报》2024年度优秀审稿专家
《交通运输工程学报》2024年度优秀论文
《交通运输工程学报》入选“中国科技期刊卓越行动计划二期项目”
《交通运输工程学报》第二届青年编委会正式成立
喜报|《交通运输工程学报》影响因子再创新高,16次被评为“百种中国杰出学术期刊”
喜报 | 《交通运输工程学报》入选2024年度中国高校科技期刊建设示范案例库•杰出科技期刊
作者园地
更多>
版权转让协议及承诺
关于文章中的中国地图
中图分类号
学术会议
更多>
会议通知|第十一届“桥梁与隧道工程”学科建设工作研讨会(2号通知)
第三届近海深水桥隧工程设计与研究进展学术研讨会通知(5月24-25日,哈尔滨)
第三届OnSite自动驾驶算法挑战赛即将举办(3月14-16日 上海)
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式