

Analysis of speed control behavior for driver on mountain highway
Article Text (Baidu Translation)
-
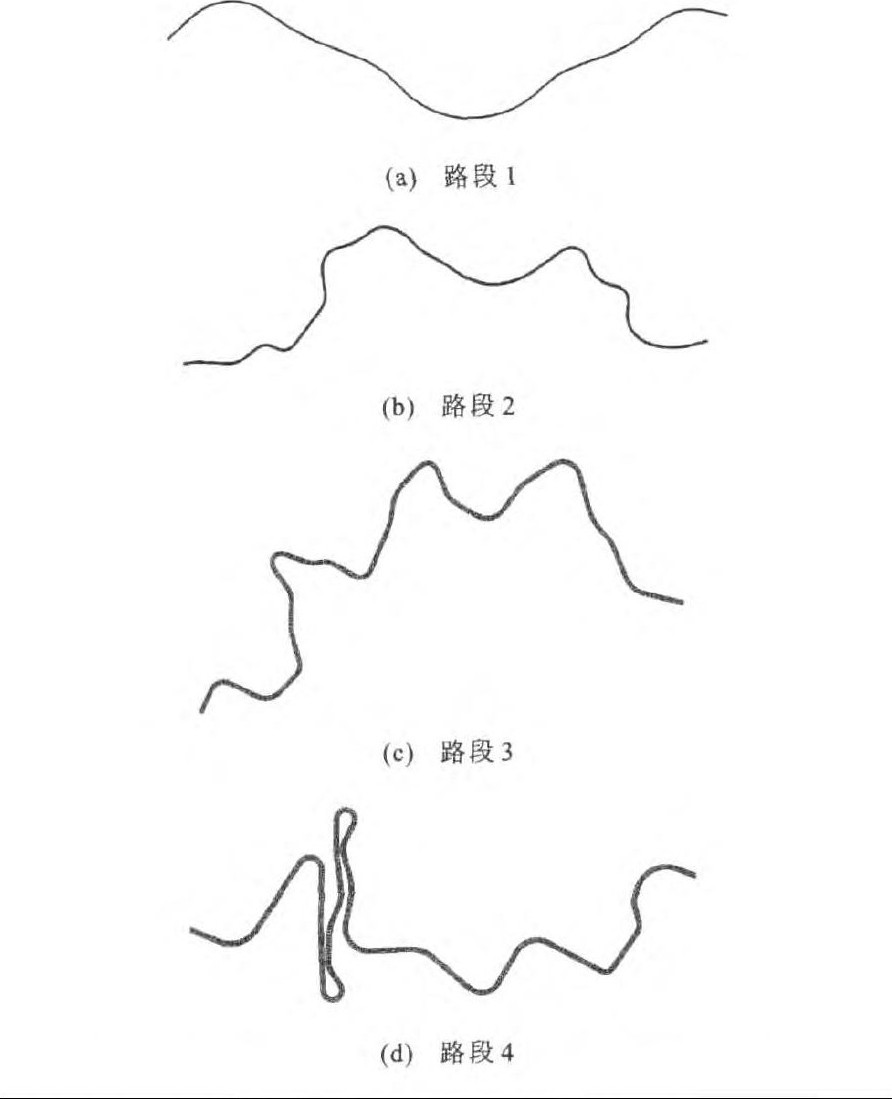
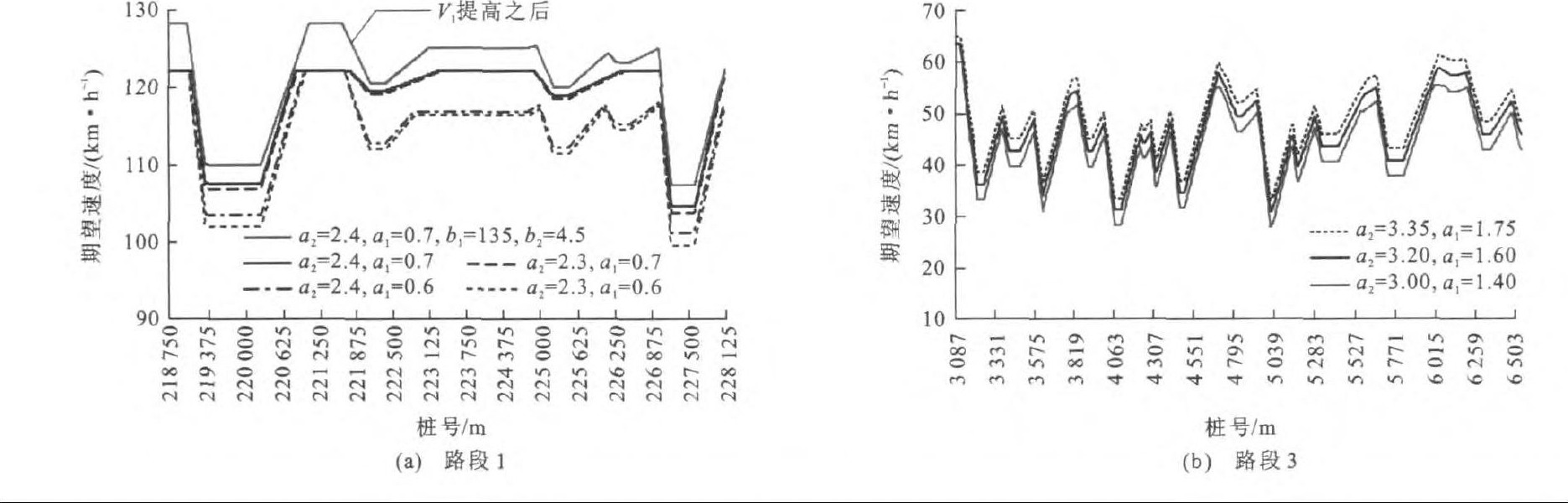
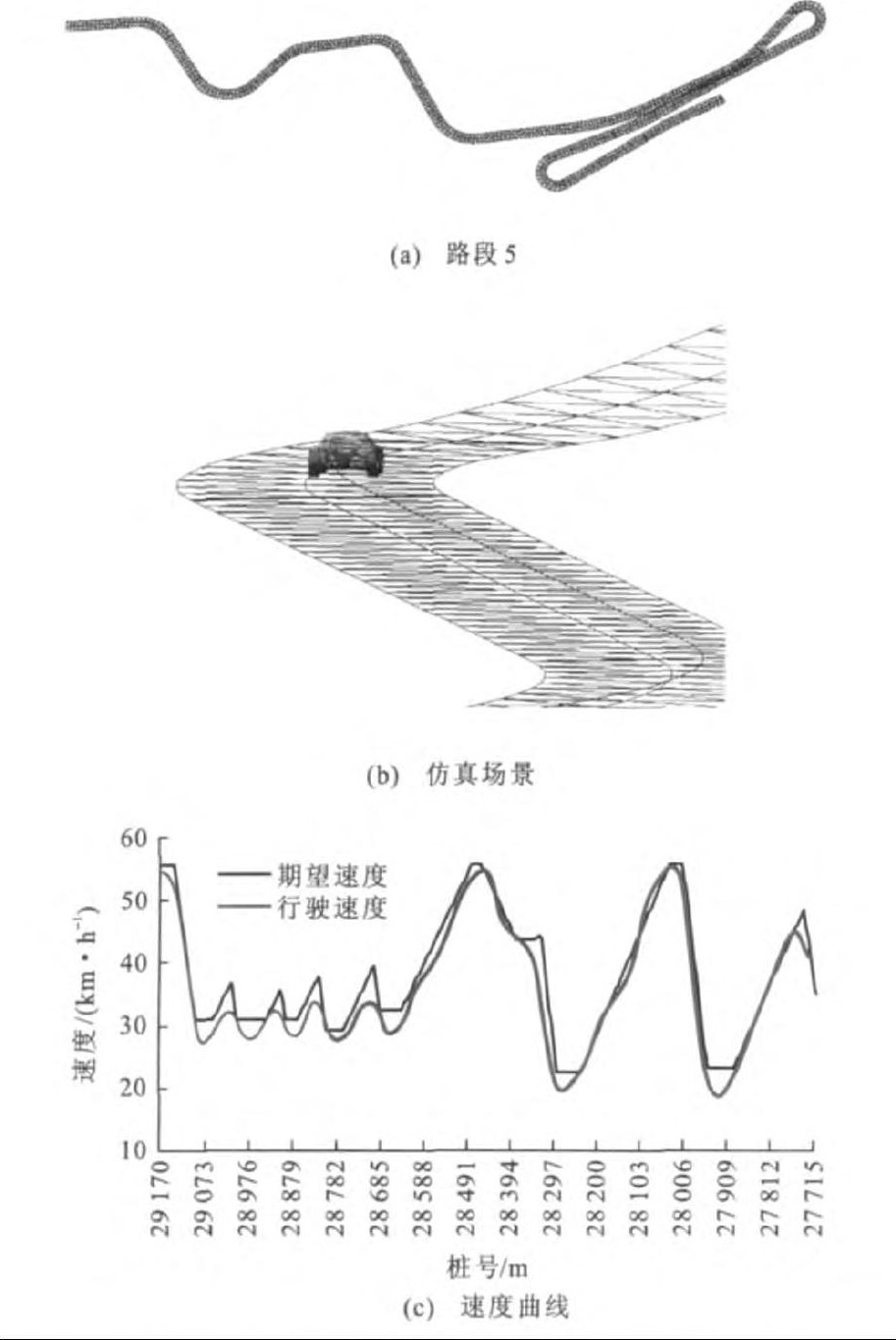
摘要: 根据大量的路上行驶试验和断面速度观测数据, 分析了道路几何线形与驾驶人速度选择行为之间的关系, 建立了能够描述弯道行驶、驶进与驶离弯道、直线行驶时的速度选择模型和加、减速度模型, 从而生成沿道路里程变化的期望速度曲线。用机械动力学分析软件ADAMS建立汽车的动力学模型, 用VB6.0编制道路模块, 用VC++7.0编制驾驶人模型, 仿真开始阶段生成期望轨迹和期望速度, 然后采用前视预瞄的策略进行跟随, 实现了车辆的自主驾驶。模拟结果表明: 汽车期望速度和行驶路线与汽车实际行驶速度和行驶路线变化趋势相同, 以期望速度作为汽车跟随的目标速度, 符合汽车的动力学特性要求, 能够引领汽车在复杂山区道路上的安全行驶。Abstract: The relationship between road geometric characteristic and driving speed was analyzed based on driving experiments and observation data on highways. The mathematic models of acceleration, deceleration and driver's speed control behavior on curve, entering or leaving curve, driving on tangent were obtained, and desired speed profiles along road were generated by the models. A car dynamics model was created by using mechanical dynamics analysis software ADAMS, roadway module was developed by using VB6.0, driver module was developed by using VC++7.0. At the simulation beginning, desired speed and desired path were generated, the car followed them in preview strategy, and the autonomous driving of car was achieved. Simulation result shows that desire speed and desired path change in a same trend with actual driving speed and path. Desired speed can be as the objective for car to follow, it adapts car dynamics characteristics, and can guide the driving of car on complex mountain highways safely.
-
Key words:
- road safety /
- driving behavior /
- desired speed /
- operating speed /
- highway alignment /
- autonomous driving
-

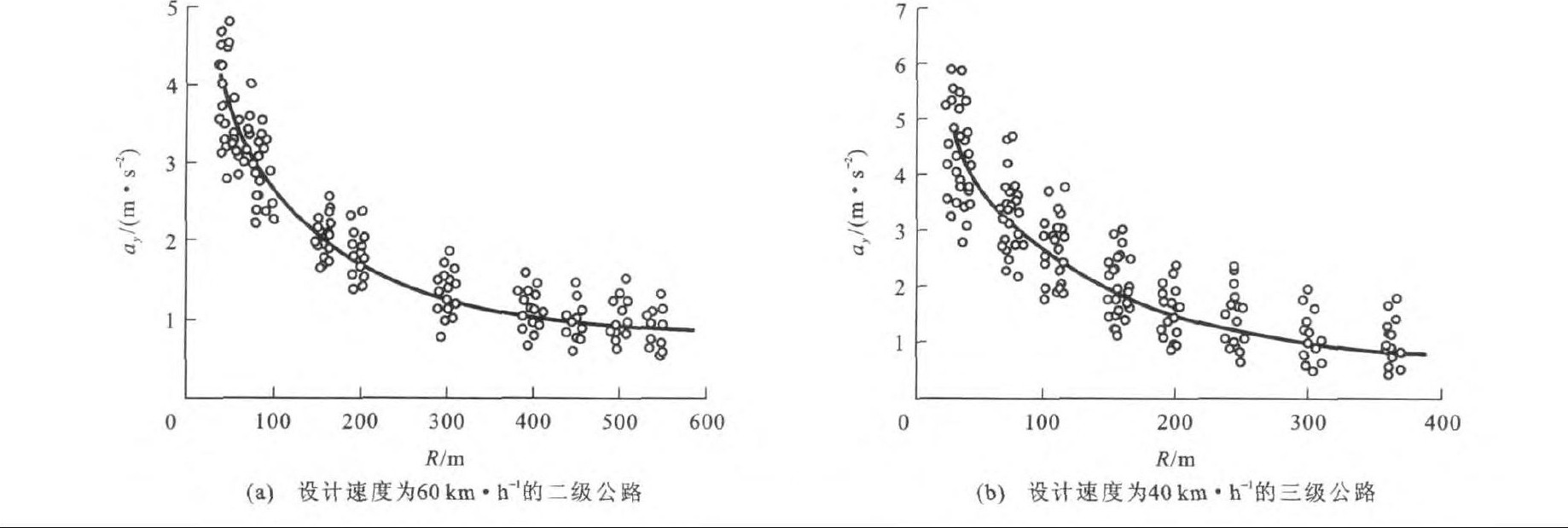
图 1 小客车在山区公路上的侧向加速度
Figure 1. Lateral accelerations of passeinger cars on mountain highways

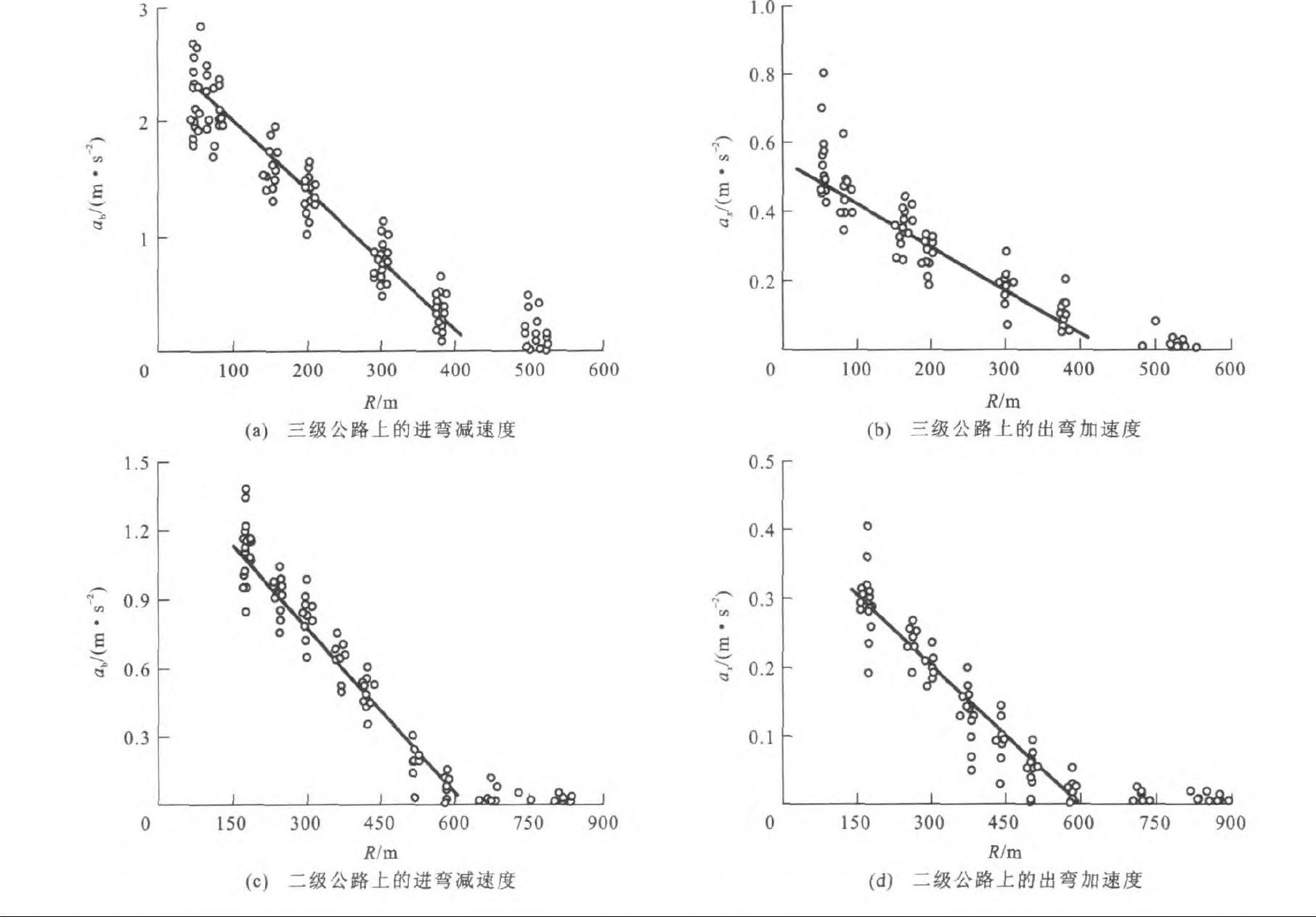
图 2 小客车进/出弯道时的减速度和加速度
Figure 2. Decelerations and accelerations of passenger cars while entering and departing curves

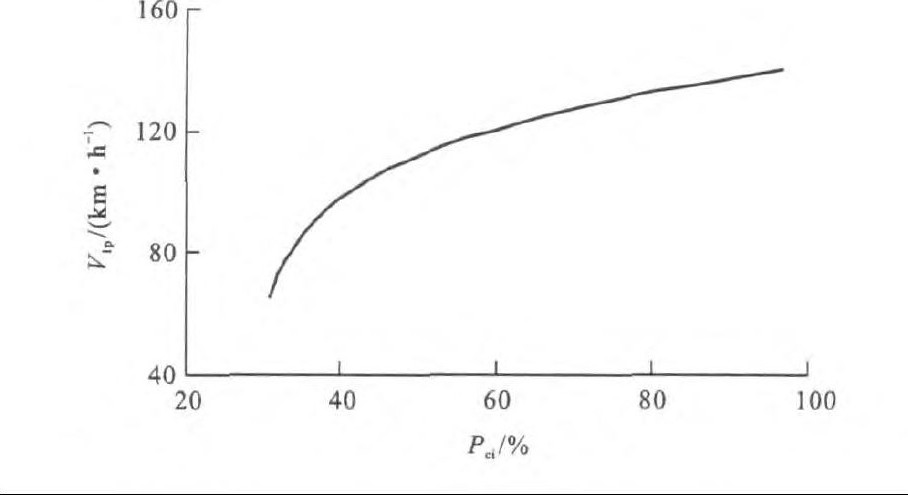
图 4 最高速度与路面状况之间的关系
Figure 4. Relationship between maximum driving speed and pavement condition index
-
[1] PICK AJ, COLE DJ. A mathematical model of driver steering control including neuromuscular dynamics[J]. Journal of Dynamic Systems, Measurement, and Control, 2008, 130 (3): 1-9. [2] CHANG T H. Field performance assessment of the ADVANCE-F automatic steering control vehicle[J]. Control Engineering Practice, 2004, 12 (5): 569-576. doi: 10.1016/S0967-0661(03)00138-2 [3] SOTELO M A. Lateral control strategy for autonomous steering of Ackerman-like vehicles[J]. Robotics and Autonomous Systems, 2003, 45 (3/4): 223-233. [4] RAJAMANI R, ZHU C, ALEXANDER L. Lateral control of a backward driven front-steering vehicle[J]. Control Engineering Practice, 2003, 11 (5): 531-540. [5] MOON S, MOONI, YI K. Design, tuning, and evaluation of a full-range adaptive cruise control system with collisio navoidance[J]. Control Engineering Practice, 2009, 17 (4): 442-455. doi: 10.1016/j.conengprac.2008.09.006 [6] MA R, KABER D B. Situation awareness and workload in driving while using adaptive cruise control and a cell phone[J]. International Journal of Industrial Ergonomics, 2005, 35 (10): 939-953. doi: 10.1016/j.ergon.2005.04.002 [7] VLASSENROOT S, BROEKX S, MOL J D, et al. Driving with intelligent speed adaptation: final results of the Belgian ISA-trial[J]. Transportation Research Part A: Policy and Practice, 2007, 41 (3): 267-279. [8] TOKUNAGA R A, ASANO M, MUNEHIRO K, et al. Effects of curve designs and road conditions on driver's curve sharpness judgment and driving behavior[J]. Journal of the Eastern Asia Society for Transportation Studies, 2005, 6: 3536-3550. [9] ODHAMS A M, COLE DJ. Models of driver speed choice in curves[C]∥PYGOTT R J. 7th International Symposium on Advanced Vehicle Control (AVEC 04). Delft: Royal Dutch Association of Engineers, 2004: 1-6. [10] HUGEMANN W, NICKEL M. Longitudinal and lateral accelerations in normal day driving[C]∥ALLEN E J. ITAI Conference. London: The Institute of Traffic Accident Investigators, 2003: 1-8. [11] CAROLI NE M H, ABISHAI P, HANEEN F. Further evaluation of the relationship between enhanced consistency model and safety of two-lane rural roads in Israel and Germany[J]. European Journal of Transport and Infrastructure Research, 2008, 8 (4): 320-332. [12] KRAMMES R A, GARNHAM M A. Worldwide review of alignment design policies[C]∥Texa Transportation Institute. International Symposiumon Highway Geometric Design Practices. Washington DC: Transportation Research Board, 1998: 1-17. [13] TREFFNER P, BARRETT R, PETERSEN A. Stability and skill in driving[J]. Human Movement Science, 2002, 21 (5): 749-784. [14] 徐进, 彭其渊, 邵毅明, 等. 运行车速预测新方法及其应用[J]. 西南交通大学学报, 2010, 45 (2): 238-248. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT201002013.htmXU Jin, PENG Qi-yuan, SHAO Yi-ming, et al. Newprediction method of operating speed andits application to highway alignment evaluation[J]. Journal of Southwest Jiaotong University, 2010, 45 (2): 238-248. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT201002013.htm -

 下载:
下载:





 点击查看大图
点击查看大图
图(9) / 表(4)
计量
- 文章访问数: 962
- HTML全文浏览量: 146
- PDF下载量: 417
- 被引次数: 0
