

Vehicle positioning using GPS/CP and intersection collision detection
Article Text (Baidu Translation)
-
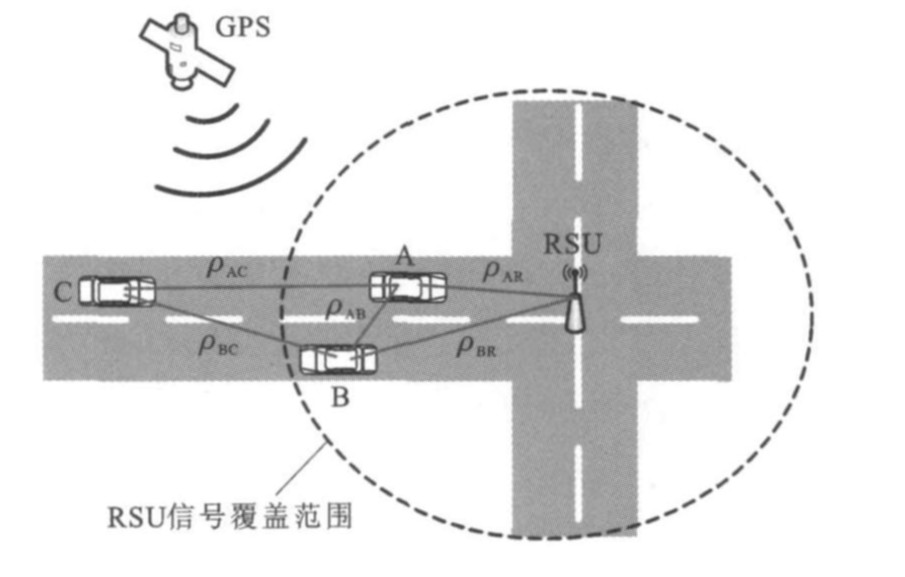
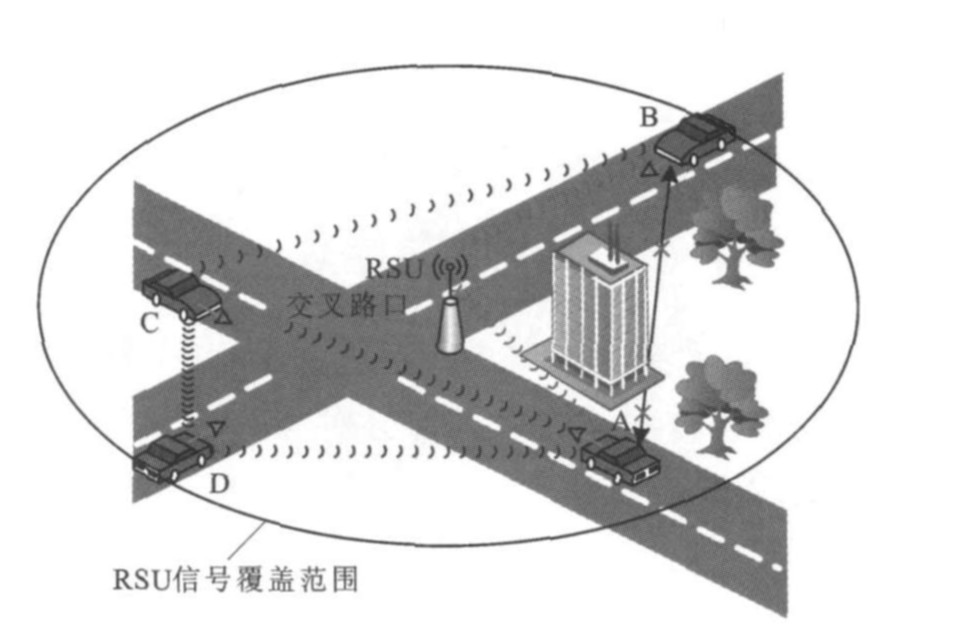
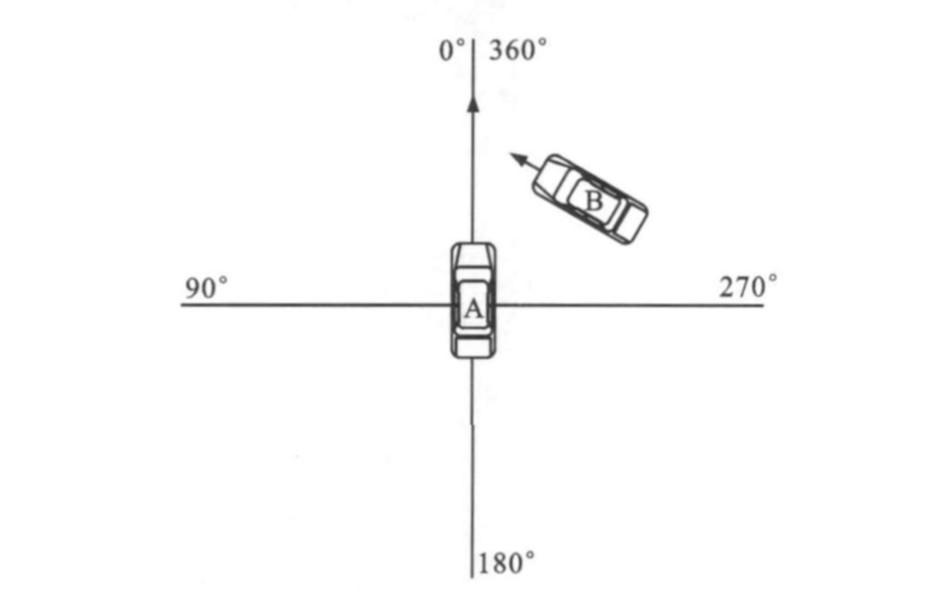
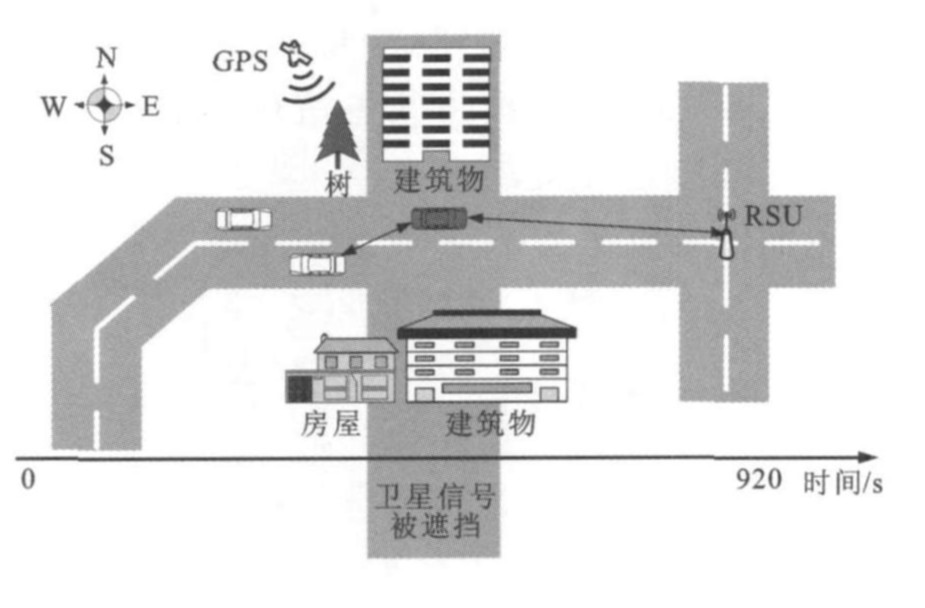
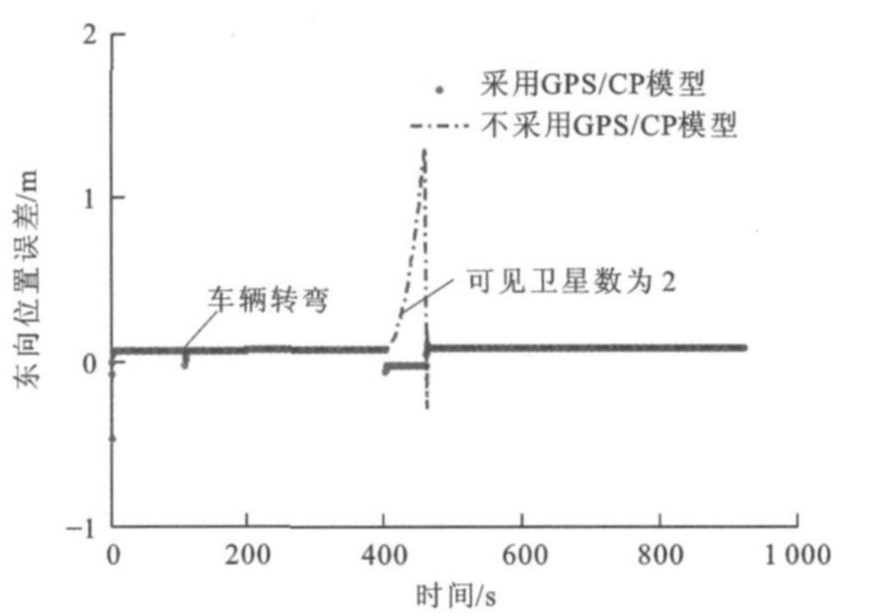
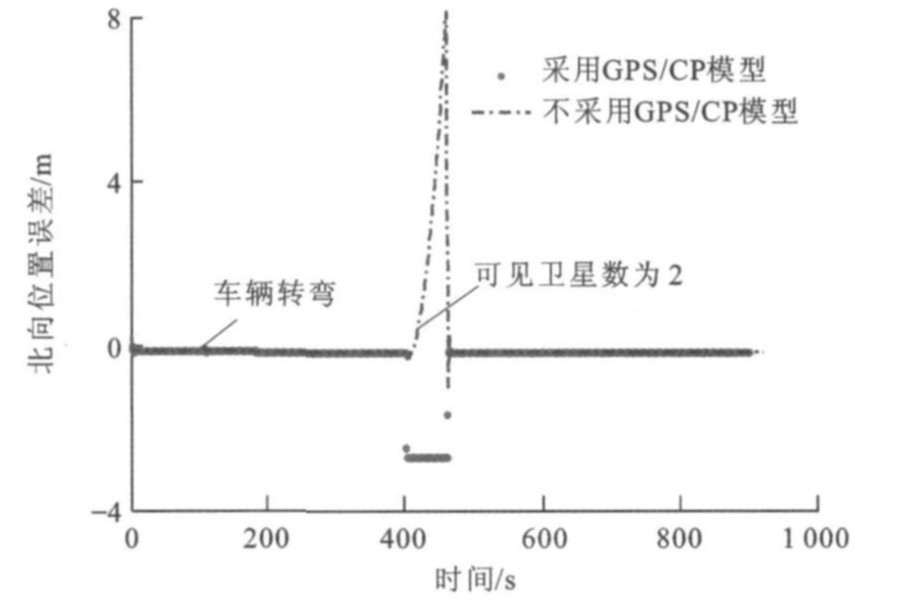
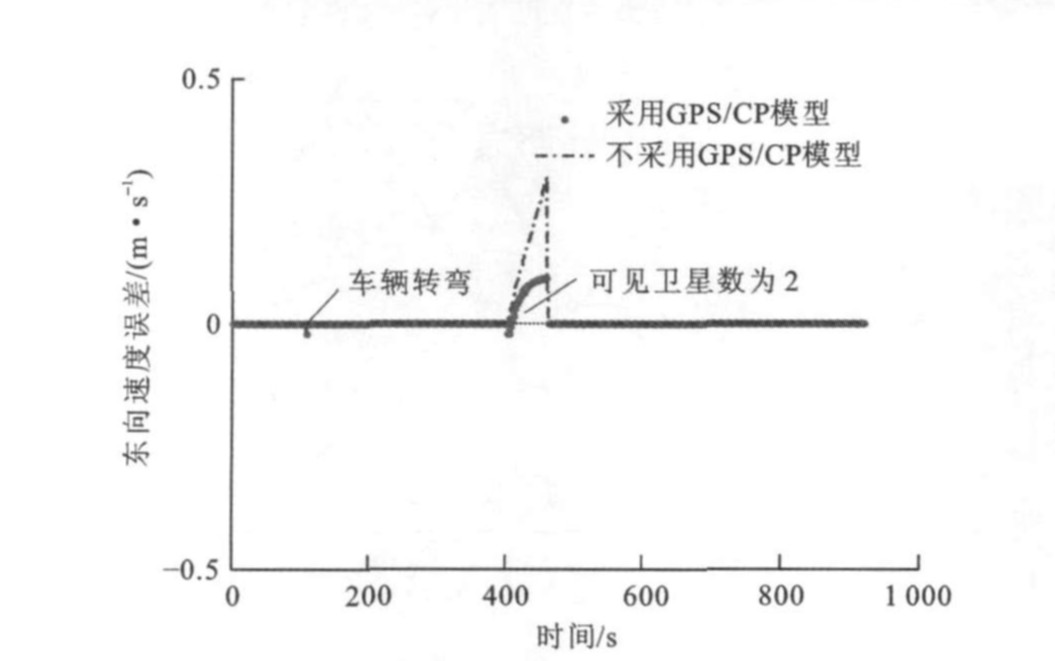
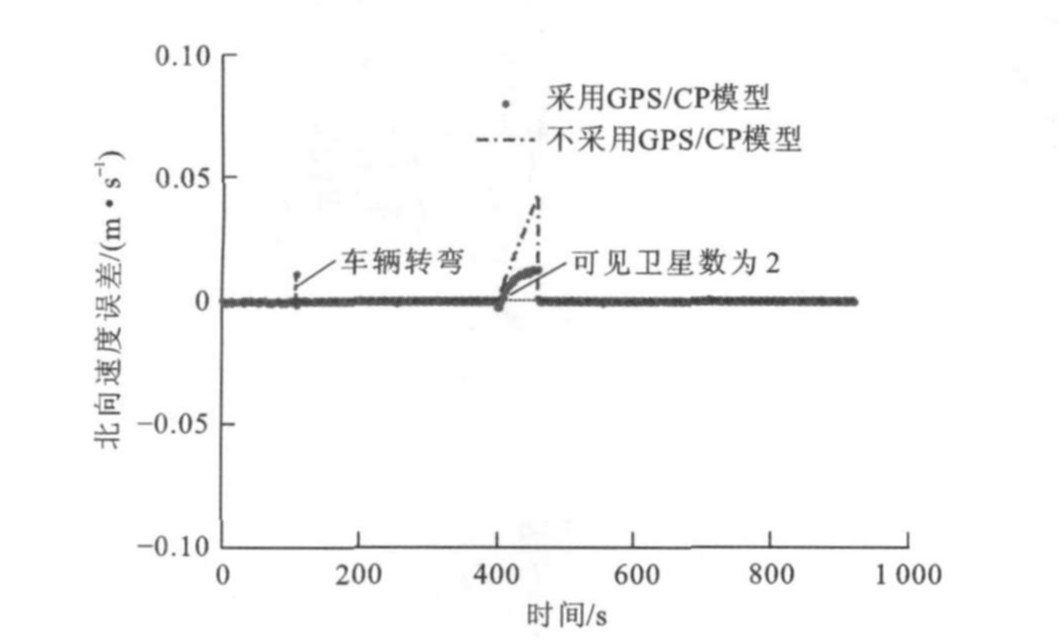
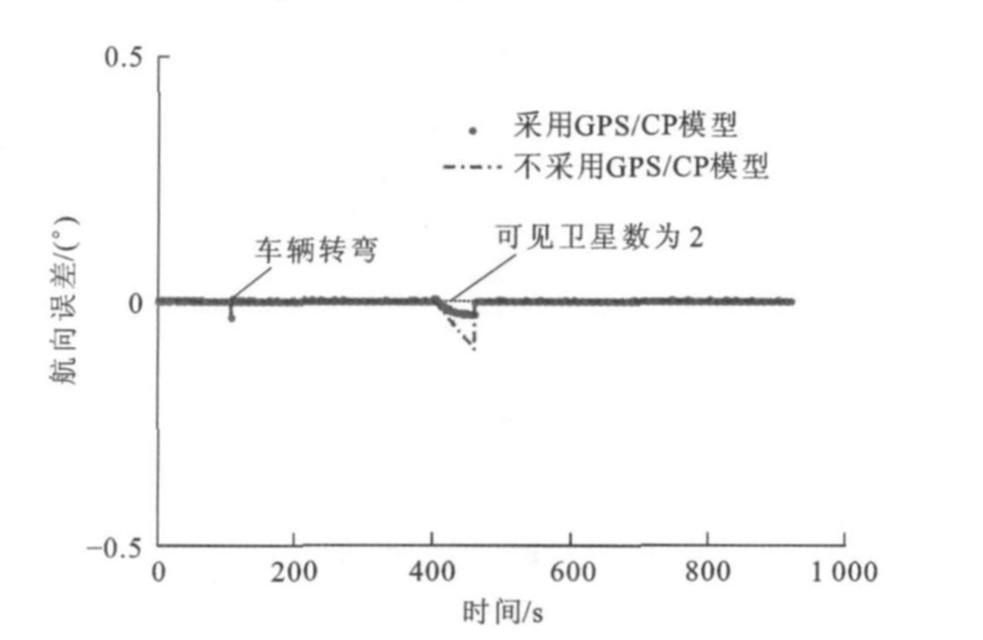
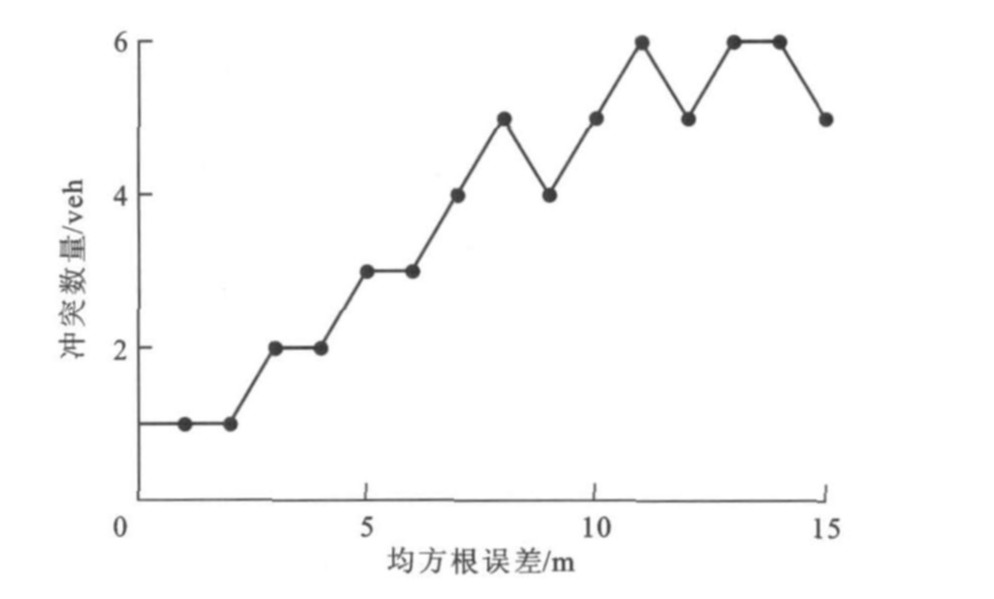
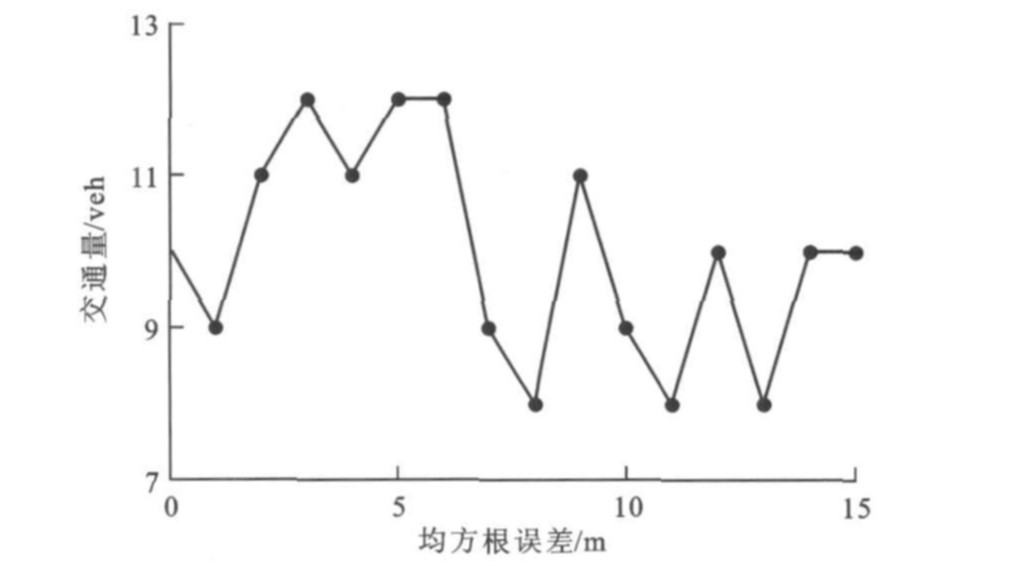
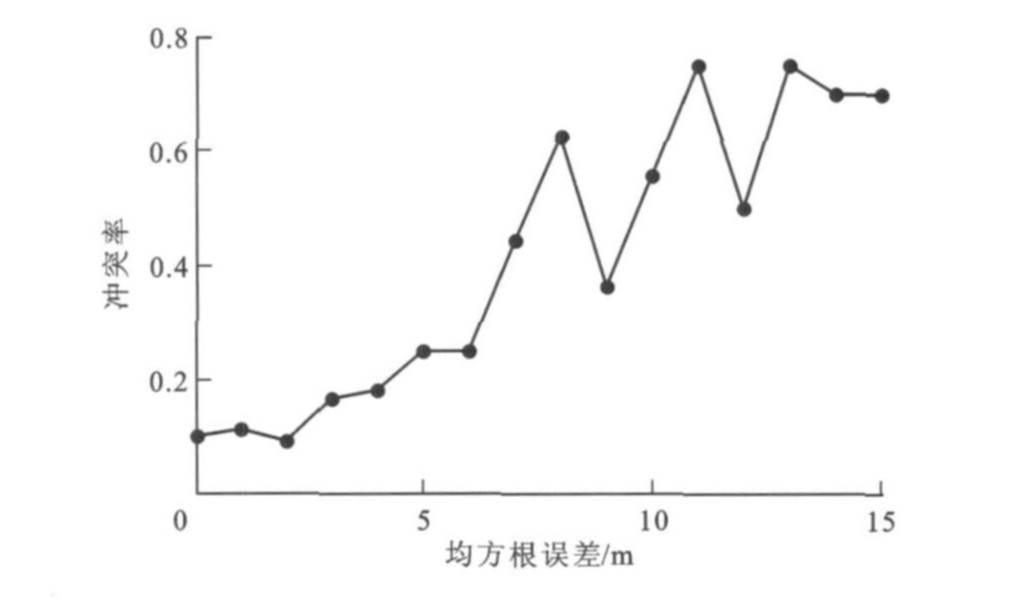
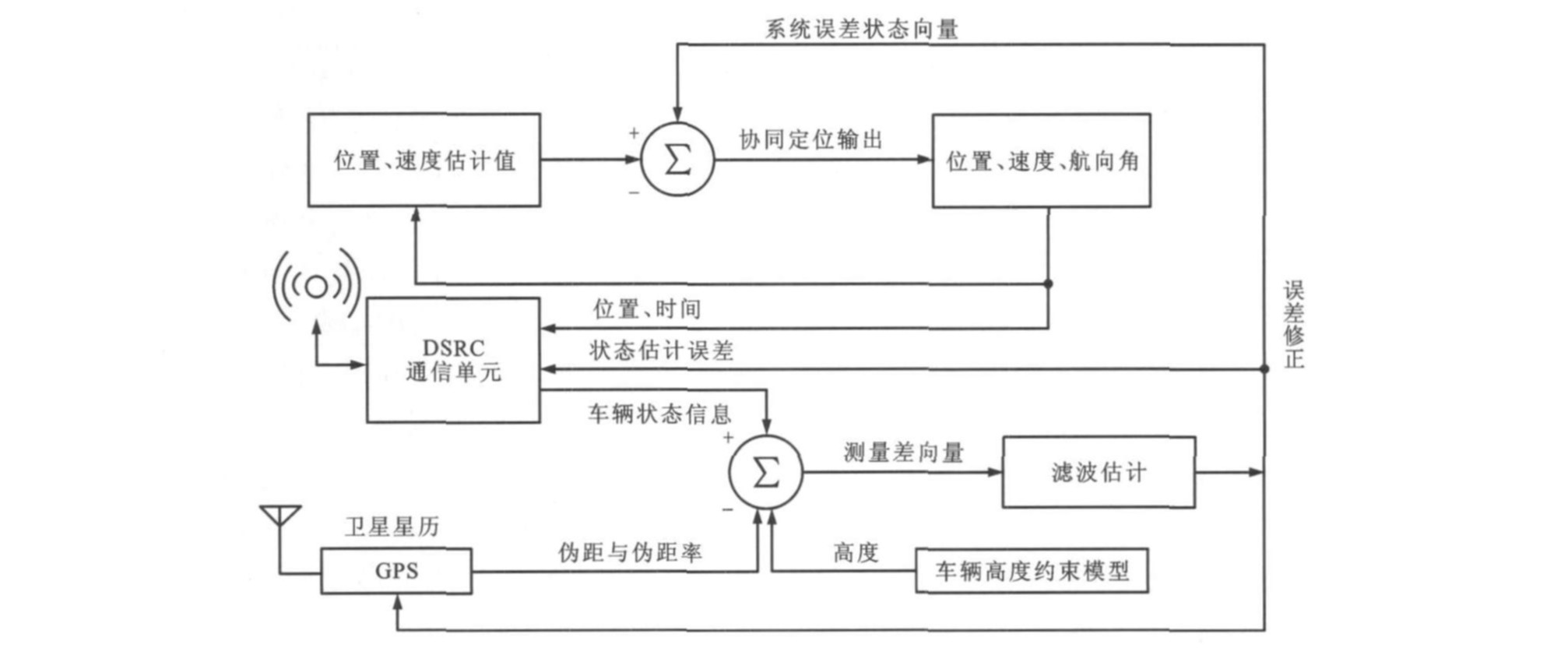
摘要: 针对车辆行驶在城市道路中时GPS定位性能受限的问题, 提出了一种基于车路协同定位(CP)与高度约束模型的紧耦合定位方法。基于短程通信协议(DSRC)实现交叉口车路共享车辆状态信息, 提出了一种车车(V2V)/车路(V2I)信息协同交互的交叉口车辆冲突检测方法。为了验证GPS/CP车辆定位与交叉口车辆冲突检测方法的效能, 搭建了基于场景的仿真环境, 进行组合定位仿真验证与多场景交叉口冲突检测仿真验证。仿真结果表明: 在可见卫星数量下降的情况下车辆定位误差保持在3 m以内; 在交叉口车辆为20 veh, 且无定位误差的情况下, 车辆冲突数和冲突率减少, 车辆通过数略有下降; 要实现交叉口冲突检测, 车辆定位误差应小于6 m。综合利用GPS/CP车辆定位方法较高的定位精度和基于V2V/V2I的交叉口冲突检测方法较高的安全性, 能获得较低的交叉口车辆冲突率和较高的交叉口车辆通过数。Abstract: As GPS was constrained for moving vehicle in urban road, a tightly coupled positioning method based on cooperative positioning(CP)and height constrained model was presented. Vehicle status informations were shared by vehicle and infrastructure based on dedicated short-range communication(DSRC)at the intersection, and an intersection collision detection method was proposed based on the cooperative communication of vehicle to vehicle(V2V)and vehicle to infrastructure(V2I). The simulation environments based on scenario were constructed to validate the performance of GPS/CP and intersection collision detection method, and integrated positioning simulation and multi-scenario intersection collision detection were carried out. Simulation result indicates that the positioning error of vehicle is less than 3 m when visible satellite number reduces. The number ofcollision vehicles and vehicle collision rates decrease, traffic volume slightly declines when vehicle number is 20 and also no positioning error exists at the intersection. Vehicle positioning error must be less than 6 m to achieve collision detection. Based on comprehensive utilization of higher positioning accuracy using GPS/CP and a safer collision detection method based on V2V/V2I, low vehicle collision rates and high traffic capacity at the intersection can be got.
-
表 1 定位性能比较
Table 1. Comparison of positioning performances
方法 均方根误差/m 东向 北向 不采用GPS/CP模型 0.63 3.66 采用GPS/CP模型 0.12 2.69  下载: 导出CSV
下载: 导出CSV
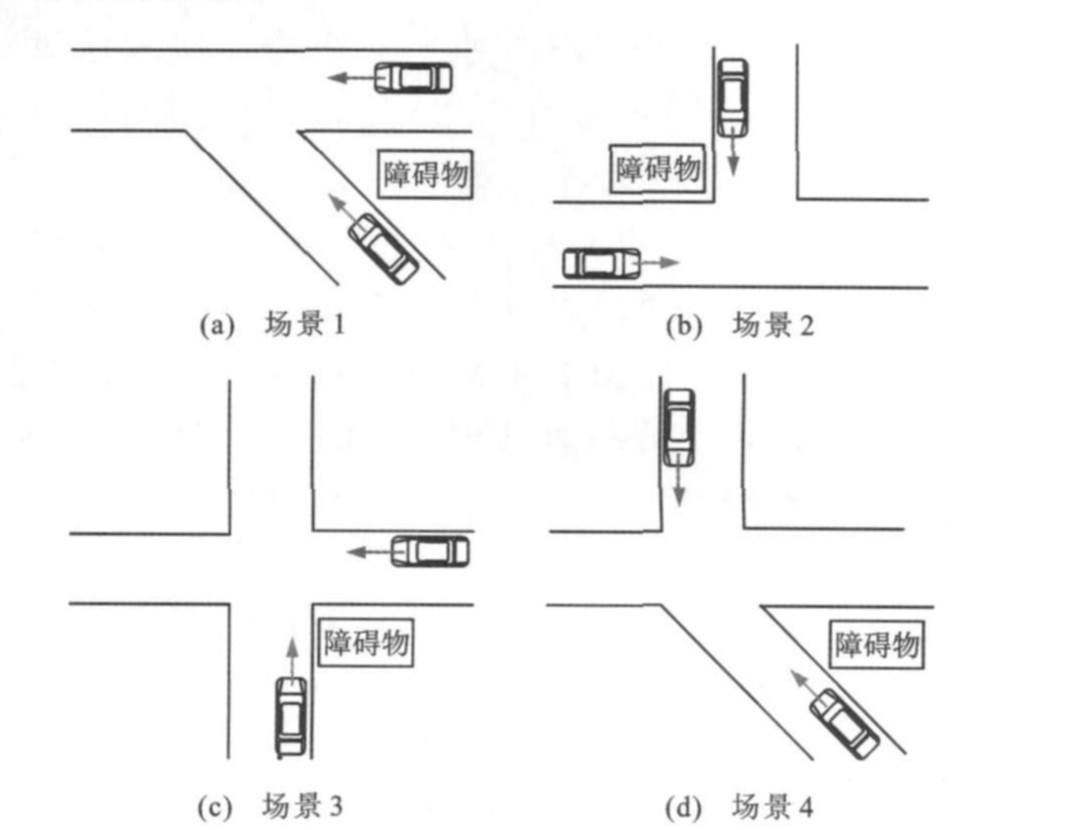
表 2 多场景下交叉口冲突检测性能
Table 2. Collision detection performance in multi-scenario intersections
场景 统计 无检测 无RSU中继检测 RSU中继检测 场景1 冲突数/veh 6.6 4.4 1.2 通过数/veh 12.4 11.4 9.8 冲突率/% 0.53 0.39 0.12 场景2 冲突数/veh 6.4 4.0 1.0 通过数/veh 12.2 11.0 9.2 冲突率/% 0.52 0.36 0.11 场景3 冲突数/veh 4.6 2.4 0.6 通过数/veh 10.4 9.4 8.2 冲突率/% 0.44 0.26 0.07 场景4 冲突数/veh 4.2 2.6 0.8 通过数/veh 11.8 9.2 8.0 冲突率/% 0.36 0.28 0.10
下载: 导出CSV
-
[1] CUI You-jing, GE S S. Autonomous vehicle positioning with GPS in urban canyon environments[J]. IEEE Transactions on Robotics and Automation, 2003, 19(1): 15-25. doi: 10.1109/TRA.2002.807557 [2] SHI Hang, WU Zhou, Liu Bao-sheng. An adaptive filter for INS/GPS integrated navigation system[C]//IMACS. IMACS Multiconference on Computational Engineering in Systems Applications. Beijing: IMACS, 2006: 651-654. [3] SHI E. An improved real-time adaptive Kalman filter for lowcost integrated GPS/INS navigation[C]//MIC. 2012International Conference on Measurement, Information and Control. Beijing: MIC, 2012: 1093-1098. [4] 岳晓奎, 袁建平. H∞滤波算法及其在GPS/SINS组合导航系统中的应用[J]. 航空学报, 2001, 22(4): 366-368. doi: 10.3321/j.issn:1000-6893.2001.04.018YUE Xiao-kui, YUAN Jian-ping. H∞ filtering algorithm and its application in GPS/SINS integrated navigation system[J]. Acta Aeronautica et Astronautica Sinica, 2001, 22(4): 366-368. (in Chinese). doi: 10.3321/j.issn:1000-6893.2001.04.018 [5] PARKER R, VALAEE S. Vehicle localization in vehicular networks[C]//IEEE. IEEE64th Vehicular Technology Conference. Montreal: IEEE, 2006: 1-5. [6] BROWN A K. GPS/INS uses low-cost MEMS IMU[J]. Aerospace and Electronic Systems Magazine, 2005, 20(9): 3-10. doi: 10.1109/MAES.2005.1514768 [7] CHIOU T Y, ALBAN S, ATWATER S, et al. Performance analysis and experimental validation of a Dopper-aider GPS/INS receiver for JPALS applications[C]//IEEE. Proceedings of ION GNSS17th International Technical Meeting of the Satellite Division. Long Beach: IEEE, 2004: 1609-1618. [8] SUN D. Ultra-tight GPS/reduced IMU for land vehicle navigation[D]. Calgary: University of Calgary, 2010. [9] BABU R, WANG Jin-ling. Ultra-tight integration of pseudolites with INS[C]//IEEE. Position, Location and Navigation Symposium. San Diego: IEEE, 2006: 705-714. [10] DRAWIL N M, BASIR O. Intervehicle-communication-assisted localization[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 678-691. doi: 10.1109/TITS.2010.2048562 [11] 王云鹏, 易振国, 夏海英, 等. 基于流行病模型的车路协同预警信息交互方法[J]. 北京航空航天大学学报, 2011, 37(5): 515-518. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201105004.htmWANG Yun-peng, YI Zhen-guo, XIA Hai-ying, et al. Cooperative traffic alarming method based on epidemic model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(5): 515-518. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201105004.htm [12] TU Lai, HUANG C M. Forwards: a map-free intersection collision-warning system for all road patterns[J]. IEEE Transactions on Vehicular Technology, 2010, 59(7): 3233-3248. doi: 10.1109/TVT.2010.2051344 [13] WANG S Y, CHENG Y W, LIN C C, et al. A vehicle collision warning system employing vehicle-to-infrastructure communications[C]//IEEE. Wireless Communications and Networking Conference. Las Vegas: IEEE, 2008: 3075-3080. [14] YAO Jun, BALAEI A T, HASSAN M, et al. Improving cooperative positioning for vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2011, 60(6): 2810-2823. doi: 10.1109/TVT.2011.2158616 [15] 黄罗毅, 吴志周, 杨晓光, 等. 基于仿真的IEEE802.11p在车路协同中的适应性研究[J]. 交通信息与安全, 2011, 29(3): 123-126. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201103028.htmHUANG Luo-yi, WU Zhi-zhou, YANG Xiao-guang, et al. Simulation of the adaptability of IEEE802.11p in IntelliDrive system[J]. Journal of Transport Information and Safety, 2011, 29(3): 123-126. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201103028.htm [16] WANG S Y, LIN C C. NCTUns6.0: a simulator for advanced wireless vehicular network research[C]//IEEE. IEEE71st Vehicular Technology Conference. Taipei: IEEE, 2010: 1-2. [17] WANG S Y, CHOU C L. NCTUns tool for wireless vehicular communication network researches[J]. Simulation Modelling Practice and Theory, 2009, 17(7): 1211-1226. -




 点击查看大图
点击查看大图
图(17) / 表(2)
计量
- 文章访问数: 1047
- HTML全文浏览量: 199
- PDF下载量: 1177
- 被引次数: 0
