

-
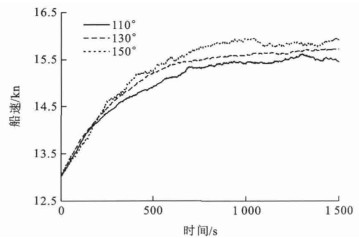
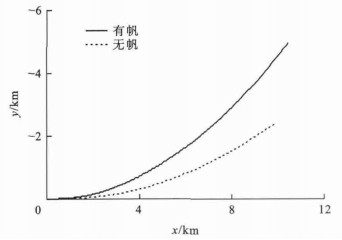
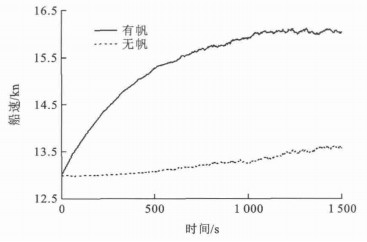
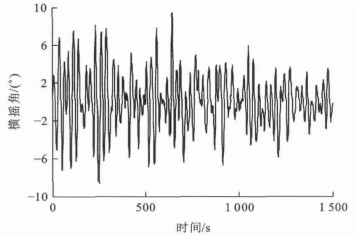
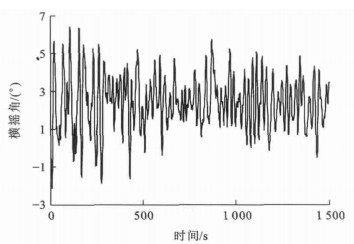
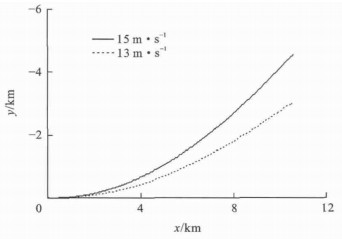
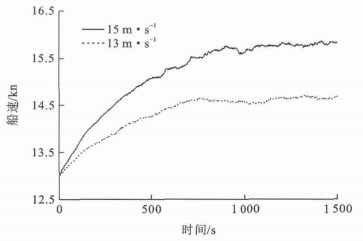
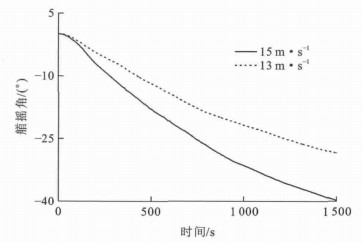
摘要: 分析了处于复杂环境下的风帆受力, 给出了风帆在最佳攻角下的受力函数。基于船舶运动与主机转速之间的耦合关系, 得出了船舶主机输出转矩与油门杆位置的拟合函数。以76 000DWT大型远洋散货船“文竹海”号为研究对象, 根据实船参数建立了4自由度的风帆助航船舶运动模型。仿真结果表明: 添加风帆后船舶速度增大, 横摇角减小, 但偏航增加。添加风帆后, 在相同时间内船舶行驶的里程、最佳攻角下的船速与横摇幅度都随风速的增大而增大, 但横摇角小于15°, 在安全范围之内。可见, 船舶运动模型符合实际船舶运动规律, 是有效的。Abstract: The forces of sail in complex environment were analyzed, and the force functions of sail under the best attack angle were obtained.Based on the coupling relationship between ship motion and ship main diesel engine revolution, the fitting function of main diesel engine output torque and throttle lever position of ship was deduced.76 000 DWT large ocean-going bulk ship'Wenzhuhai'was taken as research object, a sail-assisted ship motion model with four degrees of freedom was constructed based on real ship parameters.Simulation result shows that after adding sail, ship speed increases and roll angle decreases, but ship yaws more.Ship journey in the same time, ship speed under the best attack angle, and roll amplitude increase with the increase of wind speed after adding sail.Roll angle is less than 15° within safe range.Analysis result is consistent with the motion laws of real ship, so the model is effective.
-

图 11 不同风速下的航迹对比
Figure 11. Comparison of ship trajectories under different wind speeds
表 1 船舶主要参数
Table 1. Main parameters of ship

-
[1] SUN Y W, YAN X P, YUAN C Q, et al. Research progress in marine grid-connected photovoltaic technology[C]∥ANZSES. Proceedings of 47th Annual Conference of the Australian and New Zealand Solar Energy Society(ANZSES). Melbourne: ANZSES, 2009: 1-9. [2] CRUZ N A, ALVES J C. Autonomous sailboats: an emerging technology for ocean sampling and surveillance[C]∥IEEE. OCEANS 2008. New York: IEEE, 2008: 1-6. [3] FUJIWARA T, HEARN G E, KITAMURA F, et al. Sail-sail and sail-hull interaction effects of hybrid-sail assisted bulk carrier[J]. Journal of Marine Science and Technology, 2005, 10(2): 82-95. doi: 10.1007/s00773-005-0191-4 [4] FUJIWARA T, HIRATA K, UENO M, et al. On aerodynamic characteristics of a hybrid-sail with square soft sail[C]∥ISOPE. Proceedings of 13th International Offshore and Polar Engineering Conference. Cupertino: ISOPE, 2003: 326-333. [5] 吴秀恒, 张乐文, 刘跃明. 风帆助航5000吨级江海油船操纵性试验研究[J]. 武汉水运工程学院学报, 1988, 12(3): 13-19. https://www.cnki.com.cn/Article/CJFDTOTAL-JTKJ198803001.htmWU Xiu-heng, ZHANG Le-wen, LIU Yue-ming. Research on maneuverability of 5000 t sail-assisted tankers[J]. Journal of Wuhan University of Water Transportation Engineering, 1988, 12(3): 13-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTKJ198803001.htm [6] 洪安生, 张泽华. 120吨级风帆助航机动船[J]. 造船技术, 1987(12): 46-48. https://www.cnki.com.cn/Article/CJFDTOTAL-ZCJS198712011.htmHONG An-sheng, ZHANG Ze-hua. 120 ton sail-assisted ship motor vessel[J]. Marine Technology, 1987(12): 46-48. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZCJS198712011.htm [7] 郎锁庆. 长江300 t风帆助航综合节能货船研究与设计[J]. 武汉水运工程学院学报, 1990, 14(3): 227-236. https://www.cnki.com.cn/Article/CJFDTOTAL-JTKJ199003000.htmLANG Suo-qing. Study and design of 300 t sail-assisted power-saving ship on the Yangtze River[J]. Journal of Wuhan University of Water Transportation Engineering, 1990, 14(3): 227-236. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTKJ199003000.htm [8] DUPRIEZ-ROBIN F, LORON L, CLAVEAU F, et al. Design and optimization of a hybrid sailboat by a power modeling approach[C]∥IEEE. ESTS 2009. New York: IEEE, 2009: 270-277. [9] 古纯清. 风帆助航改装船主推进装置性能研究[D]. 大连: 大连海事大学, 2010.GU Chun-qing. The study on the capability of main propulsion plant in the renewed wind-assisted ship[D]. Dalian: Dalian Maritime University, 2010. (in Chinese) [10] 王宏明. 风翼助航船非线性横摇运动及其航行安全性研究[D]. 大连: 大连海事大学, 2013.WANG Hong-ming. Study on nonlinear roll motion and sailing safety of wing-assisted ships[D]. Dalian: Dalian Maritime University, 2013. (in Chinese) [11] 于人生. 风翼实验平台建模与控制[D]. 大连: 大连海事大学, 2013.YU Ren-sheng. Wing experimental platform modeling and control[D]. Dalian: Dalian Maritime University, 2013. (in Chinese) [12] LEGURSKY K. A modified model, simulation, and tests of a full-scale sailing yacht[C]∥IEEE. OCEANS 2012. New York: IEEE, 2012: 1-7. [13] LIN X, ALVES J C, CRUZ N A, et al. Online speed optimization for sailing yachts using extremum seeking[C]∥IEEE. OCEANS 2012. New York: IEEE, 2012: 1-6. [14] PÊTRÈS C, ROMERO-RAMIREZ M A, PLUMET F, et al. Modeling and reactive navigation of an autonomous sailboat[C]∥IEEE. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2011: 3571-3576. [15] STELZER R, PRÖLL T, JOHN R I. Fuzzy logic control system for autonomous sailboats[C]∥IEEE. 2007 IEEE International Conference on Fuzzy Systems. New York: IEEE, 2007: 1-6. [16] XIAO L, JOUFFROY J. Modeling and nonlinear heading control of sailing yachts[J]. IEEE Journal of Oceanic Engineering, 2014, 39(2): 256-268. doi: 10.1109/JOE.2013.2247276 [17] FUJIWARA T, HEARN G E, KITAMURA F, et al. Steady sailing performance of a hybrid-sail assisted bulk carrier[J]. Journal of Marine Science and Technology, 2005, 10(3): 131-146. doi: 10.1007/s00773-004-0189-3 [18] PÊTRÈS C, ROMERO-RAMIREZ M A, PLUMER F. A potential field approach for reactive navigation of autonomous sailboats[J]. Robotics and Autonomous Systems, 2012, 60(12): 1520-1527. doi: 10.1016/j.robot.2012.08.004 [19] 葛艳, 孟庆春, 张文, 等. 帆船的模糊自适应控制方法研究[J]. 哈尔滨工业大学学报, 2005, 37(12): 1658-1660, 1742. doi: 10.3321/j.issn:0367-6234.2005.12.019GE Yan, MENG Qing-chun, ZHANG Wen, et al. Research on fuzzy adaptive control method of a sailboat[J]. Journal of Harbin Institute of Technology, 2005, 37(12): 1658-1660, 1742. (in Chinese) doi: 10.3321/j.issn:0367-6234.2005.12.019 [20] STELZER R, PRÖLL T. Autonomous sailboat navigation for short course racing[J]. Robotics and Autonomous Systems, 2008, 56(7): 604-614. doi: 10.1016/j.robot.2007.10.004 [21] 陈鲁愚, 陈顺怀, 严新平. 大型远洋风帆助航船舶节能效率分析[J]. 船海工程, 2010, 39(6): 121-123, 128. https://www.cnki.com.cn/Article/CJFDTOTAL-WHZC201006034.htmCHEN Lu-yu, CHEN Shun-huai, YAN Xin-ping. Analysis on energy conservation of sail-assisted ocean-going vessel[J]. Ship and Ocean Engineering, 2010, 39(6): 121-123, 128. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-WHZC201006034.htm [22] 潘德位, 林成新, 孙德平, 等. 大倾角搁浅船舶扳正过程分析[J]. 交通运输工程学报, 2015, 15(2): 50-58. http://transport.chd.edu.cn/article/id/201502006PAN De-wei, LIN Cheng-xin, SUN De-peng, et al. Uprighting process analysis of big-angle tilted aground ship[J]. Journal of Traffic and Transportation Engineering, 2015, 15(2): 50-58. (in Chinese) http://transport.chd.edu.cn/article/id/201502006 [23] 张云彩, 盛振邦. 圆弧型风帆空气动力性能的试验研究[J]. 中国造船, 1983(4): 3-12. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC198304000.htmZHANG Yun-cai, SHENG Zhen-bang. An experimental study on aerodynamic performance of circular-arc sails[J]. Shipbuilding of China, 1983(4): 3-12. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC198304000.htm [24] 于小虎. 风帆助航节能应用研究[D]. 大连: 大连海事大学, 2011.YU Xiao-hu. Study on application of energy-saving of sail-assisted ship[D]. Dalian: Dalian Maritime University, 2011. (in Chinese) [25] 袁士春. 船舶运动与主推进线性变参数联合控制的研究[D]. 大连: 大连海事大学, 2007.YUAN Shi-chun. A study on the integrated control of ship motion and mainpropulsion using linear parameter-varying[D]. Dalian: Dalian Maritime University, 2007. (in Chinese) -

 下载:
下载:
 点击查看大图
点击查看大图
图(15) / 表(1)
计量
- 文章访问数: 1127
- HTML全文浏览量: 189
- PDF下载量: 736
- 被引次数: 0
