

SMILO-VTAC model based multi-aircraft conflict resolution method in complex low-altitude airspace
-
摘要: 针对传统SMILO-VTAC模型的2种不受控情形, 提出了面向不受控情形的复杂低空多机冲突解脱模型; 在传统SMILO-VTAC模型的基础上, 考虑复杂低空空域物障限制条件, 提出了面向物障情景的低空多机冲突探测与解脱模型; 结合通用航空活动任务优先等级, 建立了基于任务优先性质的多机冲突探测与解脱规则和流程; 建立了多航空器对头汇聚场景, 基于提出的方法进行仿真验证。分析结果表明: 相比传统SMILO-VTAC模型, 提出的方法能够满足不受控情形的多机冲突探测与解脱实际需要, 并能根据任务优先等级计算方案, 解脱成本分配合理, 符合复杂低空空域航空器的特点; 提出的方法在航空器数量不大于4架次时, 求解时间略长, 但基本控制在1 s以内; 当航空器数量大于4架次时, 求解时间小于传统SMILO-VTAC模型; 当航空器数量不小于7架次时, 求解时间远低于传统SMILO-VTAC模型; 在将优先级因素加入考量后, 方法的平均解脱成本较传统SMILO-VTAC模型增加了10%~20%, 以少量增加平均解脱成本为代价, 实现了解脱成本依照优先级顺序的分配, 将高优先级航空器解脱成本向低优先级航空器传递。可见, 在多航空器运行和多优先级情景下, 改进方法具有更高的解脱效率, 在相同计算时间内具有更高的解脱架次极限。Abstract: Aiming at the two uncontrolled cases of traditional sequential mixed integer linear optimization-velocity change, turn change and altitude change(SMILO-VTAC) model, a new multi-aircraft conflict resolution model in complex low-altitude airspace under uncontrolled cases was proposed. Considering the constraints of terrain obstacles in complex low-altitude airspace, a low-altitude multi-aircraft conflict detection and resolution model for the obstacle-oriented scenarios was proposed based on the traditional SMILO-VTAC model. Combined with the priority of general aviation tasks, the rules and procedures of multi-aircraft conflict detection and resolution were established based on the task priority. A multi-aircraft head-to-head convergence scenario was established. Simulation and verification were performed based on the proposed method. Analysis result shows that compared with the traditional SMILO-VTAC model, the proposed method can meet the actual needs of multi-aircraft conflict detection and resolution in uncontrolled cases, and resolve the schemes based on task priority. The resolution cost allocation is reasonable, and the method is more suitable for the characteristics of aircrafts in complex low-altitude airspace. The solution time of the proposed method is slightly longer when the number of aircrafts is no more than 4, but it is basically controlled within 1 s. When the number of aircrafts is more than 4, the solution time of the proposed method is generally less than that of the traditional SMILO-VTAC model. When the number of aircrafts is no less than 7, the solution time of the proposed method is much lower than that of the traditional SMILO-VTAC model. Considering the priority factors, the average resolution cost of new method is 10%-20% higher than that of the traditional SMILO-VTAC model. Along with the small increase in the average resolution cost, the resolution cost is allocated in order of priority. The resolution cost of high-priority aircraft is passed to low-priority aircraft. Obviously, the improved method has higher resolution efficiency in multi-aircraft operation and multi-priority scenario, and has a higher limit of resolution amount in the same calculation time.
-

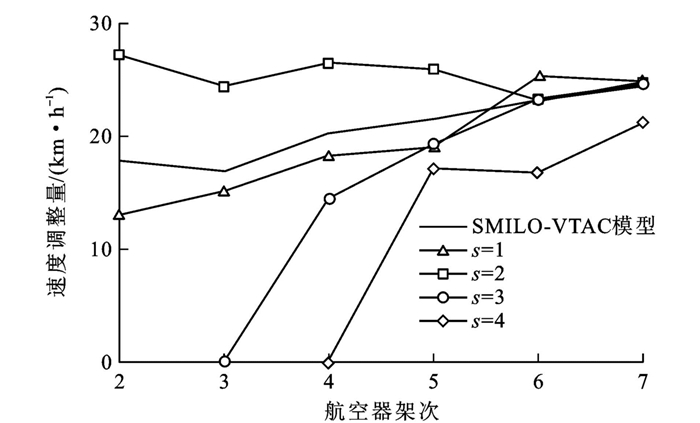
图 8 各解脱方案平均速度调整量对比
Figure 8. Comparison of average velocity changes of resolution schemes

图 10 各解脱方案平均高度调整量对比
Figure 10. Comparison of average altitude changes of resolution scheme
表 1 冲突情形分类
Table 1. Conflict situation classification
冲突情形 判断条件 基本限制 普通情形 tan(gij) < tan(lij) tan(lij)≤Sij/Cij或Sij/Cij≤tan(gij) 不受控情形(非近距特殊情形) tan(gij) > tan(lij)且tan(gij)tan(lij) < 0 tan(lij)≤Sij/Cij≤0或0≤Sij/Cij≤tan(gij) 不受控情形(近距特殊情形) tan(gij) > tan(lij)且tan(gij)tan(lij) > 0 tan(lij)≤Sij/Cij≤tan(gij)  下载: 导出CSV
下载: 导出CSV
表 2 仿真试验基础参数
Table 2. Basic parameters of simulation experiment
参数 数值 航空器保护区半径/km 3 航空器飞行速度/(km·h-1) 200 航空器最大调速量/(km·h-1) 40 航空器最大转向角/(°) 30 高度层垂直间隔/m 300 调速成本权重 1 转向成本权重 40 调高成本权重 1 200
下载: 导出CSV
表 3 “小鹰500”性能数据
Table 3. Performance data of "Kitty Hawk 500"
乘员 驾驶员1名, 最大乘客人数4名 尺寸 翼展9.879 m, 机长7.743 m, 机高3.044 m 重量 有效载荷560 kg, 最大起飞质量1 400 kg 性能 最大巡航速度300 km·h-1, 航程1 640 km
下载: 导出CSV
-
[1] WANG Lei, ZHANG Xue-jun, HAN Dong. System simulation of general aviation airborne conflict detection and resolution[J]. Advanced Materials Research, 2013, 816/817: 402-406. doi: 10.4028/www.scientific.net/AMR.816-817.402 [2] 叶博嘉, 胡明华, 田勇. 基于多Agent技术的飞机协同飞行建模与仿真[J]. 交通运输工程学报, 2013, 13(6): 90-98. doi: 10.3969/j.issn.1671-1637.2013.06.013YE Bo-jia, HU Ming-hua, TIAN Yong. Modeling and simulation of collaborative flight based on multi-agent technique[J]. Journal of Traffic and Transportation Engineering, 2013, 13(6): 90-98. (in Chinese). doi: 10.3969/j.issn.1671-1637.2013.06.013 [3] 张翔宇, 张洪海, 邱启伦. 基于Agent复杂低空飞行行为建模与仿真[J]. 航空计算技术, 2016, 46(1): 40-43, 47. doi: 10.3969/j.issn.1671-654X.2016.01.010ZHANG Xiang-yu, ZHANG Hong-hai, QIU Qi-lun. Modeling and simulation of complex low altitude airspace flight behaviors based on agent[J]. Aeronautical Computing Technique, 2016, 46(1): 40-43, 47. (in Chinese). doi: 10.3969/j.issn.1671-654X.2016.01.010 [4] 张洪海, 邱启伦, 王中叶, 等. 复杂低空混合飞行态势安全特性研究[J]. 交通运输系统工程与信息, 2016, 16(5): 212-218, 226. doi: 10.3969/j.issn.1009-6744.2016.05.032ZHANG Hong-hai, QIU Qi-lun, WANG Zhong-ye, et al. Safety characteristics of mixed flight situation in complex low-altitude airspace[J]. Journal of Transportation Systems Engineering and Information Technology, 2016, 16(5): 212-218, 226. (in Chinese). doi: 10.3969/j.issn.1009-6744.2016.05.032 [5] RONG Jie, GENG Shi-jian, VALASEK J, et al. Air traffic conflict negotiation and resolution using an onboard multiagent system[C]∥IEEE. Digital Avionics Systems Conference. New York: IEEE, 2002: 1-12. [6] WOLLKIND S, VALASEK J, IOERGER T R. Automated conflict resolution for air traffic management using cooperative multi agent negotiation[C]∥AIAA. 2004 AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2004: 1-11. [7] EBY M S, KELLY W E. Free flight separation assurance using distributed algorithms[C]//IEEE. Aerospace Conference. New York: IEEE, 1999: 429-441. [8] INNOCENTI M, GELOSI P, POLLINI L. Air traffic management using probability function fields[C]//AIAA. 2000 AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2000: 1088-1097. [9] BILIMORIA K D, LEE H Q, MAO Zhi-hong, et al. Comparison of centralized and decentralized conflict resolution strategies for multiple-aircraft problems[C]∥AIAA. 18th Applied Aerodynamics Conference. Reston: AIAA, 2013: 1-10. [10] FRAZZOLI E, MAO Z H, OH J H, et al. Resolution of conflicts involving many aircraft via semidefinite programming[J]. Journal of Guidance Control and Dynamics, 2001, 24(1): 79-86. doi: 10.2514/2.4678 [11] PALLOTTINO L, FERON E M, BICCHI A. Conflict resolution problems for air traffic management systems solved with mixed integer programming[J]. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(1): 3-11. doi: 10.1109/6979.994791 [12] ALONSO-AYUSO A, ESCUDERO L F, MARTÍN-CAMPO F J. Collision avoidance in air traffic management: a mixed-integer linear optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1): 47-57. doi: 10.1109/TITS.2010.2061971 [13] ALONSO-AYUSO A, ESCUDERO L F, MARTÍN-CAMPO F J. Exact and approximate solving of the aircraft collision resolution problem via turn changes[J]. Transportation Science, 2014, 50(1): 1-12. [14] ALONSO-AYUSO A, ESCUDERO L F, MARTÍN-CAMPO F J. Multiobjective optimization for aircraft conflict resolution. A metaheuristic approach[J]. European Journal of Operational Research, 2016, 248(2): 691-702. doi: 10.1016/j.ejor.2015.07.049 [15] LIN C E, LEE C J. Conflict detection and resolution model for low altitude flights[C]//IEEE. International Conference on Methods and Models in Automation and Robotics. New York: IEEE, 2015: 406-411. [16] 黄洋, 汤俊, 老松杨. 基于复杂网络的无人机飞行冲突解脱算法[J]. 航空学报, 2018, 39(12): 261-273. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201812023.htmHUANG Yang, TANG Jun, LAO Song-yang. UAV flight conflict resolution algorithm based on complex network[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(12): 261-273. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201812023.htm [17] 周建, RAHMANI A, 刘昕, 等. 分布式MAS在飞行冲突解脱中的应用研究[J]. 交通运输系统工程与信息, 2015, 15(5): 231-238. doi: 10.3969/j.issn.1009-6744.2015.05.033ZHOU Jian, RAHMANI A, LIU Xin, et al. Application of distributed MAS in flight conflict avoidance[J]. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(5): 231-238. (in Chinese). doi: 10.3969/j.issn.1009-6744.2015.05.033 [18] KUCHAR J K, YANG L C. A review of conflict detection and resolution modeling methods[J]. IEEE Transactions on Intelligent Transportation Systems, 2000, 1(4): 179-189. [19] MIGLIACCIO G, MENGALI G, GALATOLO R. Conflict detection and resolution algorithms for UAVs collision avoidance[J]. The Aeronautical Journal, 2014, 118(1205): 828-842. doi: 10.1017/S0001924000009568 [20] SHANDY S, VALASEK J. Intelligent agent for aircraft collision avoidance[C]∥AIAA. 2001 AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2001: 1-11. [21] BONGIORNO C, MICCICHÈ S, MANTEGNA R N. An empirically grounded agent based model for modeling directs, conflict detection and resolution operations in air traffic management[J]. Plos One, 2017, 12(4): 1-23. [22] ALONSO-AYUSO A, ESCUDERO L F, MARTÍN-CAMPO F J. Collision avoidance in air traffic management: a mixed-integer linear optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1): 47-57. [23] BILLINGSLEY T B, KOCHENDERFER M J, CHRYSSANT-HACOPOULOS J P. Collision avoidance for general aviation[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(7): 4-12. [24] FRAZZOLI E, MAO Z H, OH J H, et al. Resolution of conflicts involving many aircraft via semidefinite programming[J]. Journal of Guidance Control and Dynamics, 2001, 24(1): 79-86. [25] 江程鹏. 复杂低空飞行态势随机影响规律研究[D]. 南京: 南京航空航天大学, 2018.JIANG Cheng-peng. Research on pattern of random factor Influence to flight situation in complex low-altitude airspace[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018. (in Chinese). [26] ZHANG Hong-hai, JIANG Cheng-peng, YANG Lei. Forecasting traffic congestion status in terminal areas based on support vector machine[J]. Advances in Mechanical Engineering, 2016, 8(9): 1-11. [27] MACAL C M, NORTH M J. Tutorial on agent-based modelling and simulation[J]. Journal of Simulation, 2010, 4(3): 151-162. [28] WIGGINS M W. Vigilance decrement during a simulated general aviation flight[J]. Applied Cognitive Psychology, 2011, 25(2): 229-235. -












 点击查看大图
点击查看大图

计量
- 文章访问数: 920
- HTML全文浏览量: 169
- PDF下载量: 434
- 被引次数: 0
