

Longitudinal control model for connected autonomous vehicles influenced by multiple preceding vehicles
-
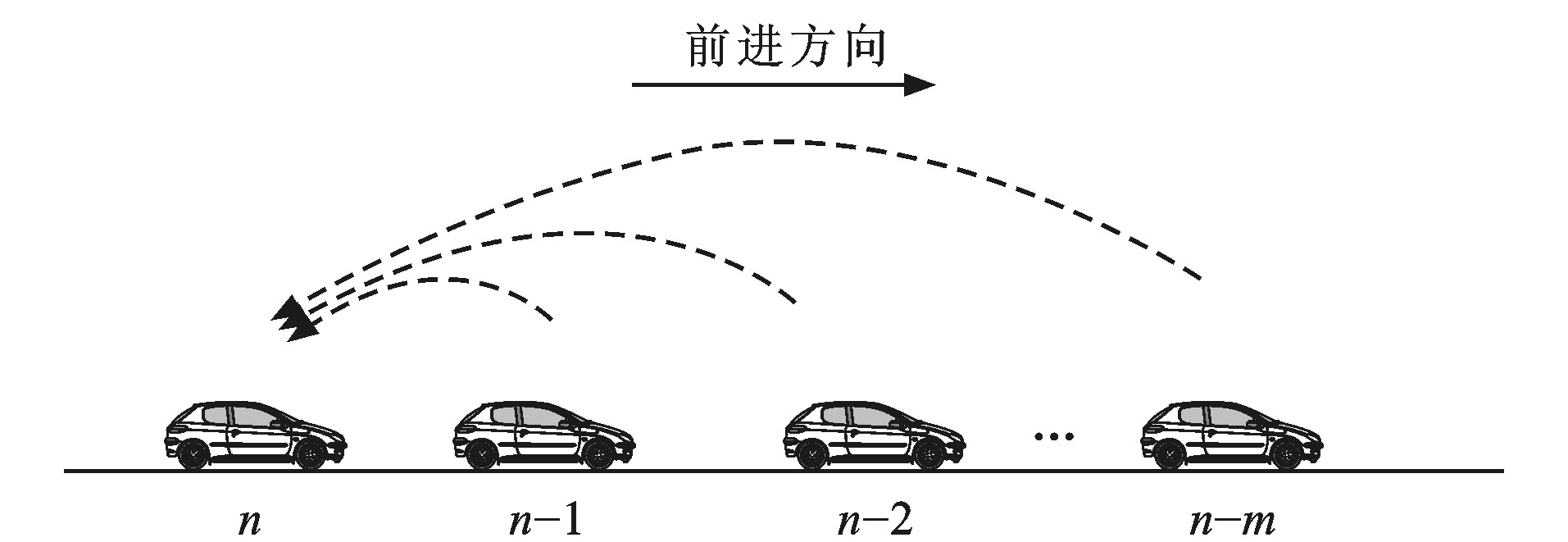
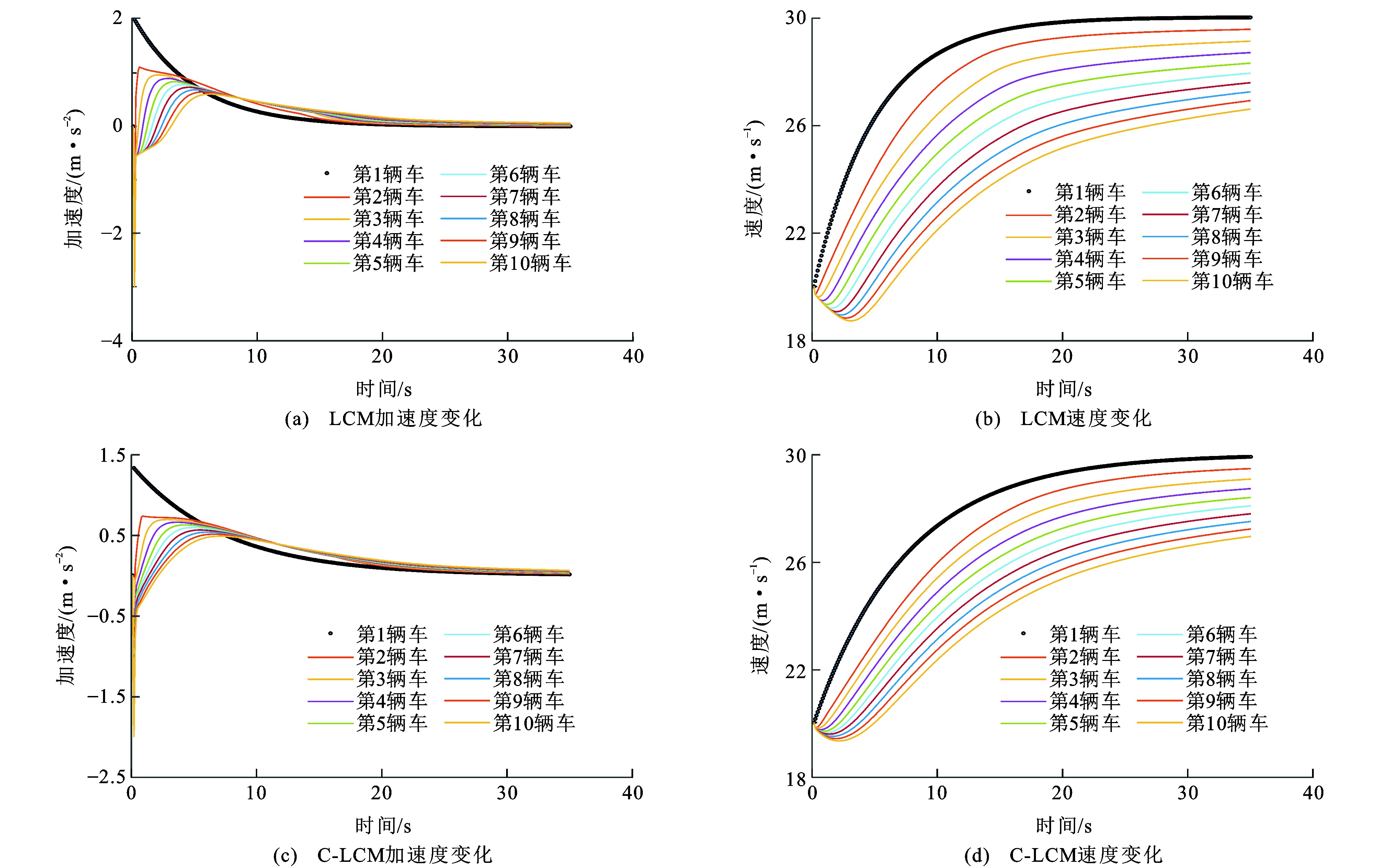
摘要: 为了更好地模拟智能网联车辆(CAV)的跟驰特性, 在纵向控制模型(LCM)的基础上考虑V2V环境下多辆前车速度和加速度的影响, 构建了智能网联环境下的纵向控制模型(C-LCM); 对LCM和C-LCM进行稳定性分析, 比较了2个模型的交通流稳定域, 确定了不同通信距离时C-LCM对交通流稳定域的影响; 设计数值仿真试验对加速和减速的常见交通场景进行模拟, 分析了在V2V通信条件下CAV的跟驰行为特征; 仿真分析了CAV不同通信距离以及不同渗透率影响下的交通流安全水平; 构建了包含不同CAV渗透率的混合交通流基本图模型。研究结果表明: 交通流稳定域随着考虑前车数量的增多而增大, 当只考虑1辆前车时, 前车与本车的间隔越远, 车辆速度系数对C-LCM稳定域的影响越大; C-LCM可以提前对多前车的行为做出反应, 更好地模拟CAV的动力学特征, 在减速情景中速度超调量从0.15减少为0.08, 最大速度延迟时间由7.5 s缩短为4.9 s, 在加速情景中速度超调量从0.07减少为0.04, 最小速度延迟时间由3.5 s缩短为2.6 s; 随着CAV渗透率的提升, 交通流的安全水平不断提升, 当通信范围内有4辆CAV时, 交通流的安全性能达到最高, 其TIT和TET指标的最大减少量分别为57.22%和59.08%;随着CAV渗透率的提升, 道路通行能力从1 281 veh·h-1提升为3 204 veh·h-1。可见, 提出的C-LCM可以刻画不同车辆的跟驰特点, 实现混合交通流建模, 并降低混合交通流的复杂性, 为智能网联车辆对交通流的影响分析提供参考。Abstract: In order to better simulate the car-following characteristics of connected autonomous vehicles(CAV), based on the longitudinal control model(LCM), the LCM in the connected autonomous environment(C-LCM) was constructed considering the influences of speed and acceleration of multiple preceding vehicles in V2 V environment. The stabilities of LCM and C-LCM were analyzed. The stability regions of two models were compared, and the influence of C-LCM on the traffic flow stable region under different communication distances was determined. Numerical simulation was designed to simulate the common traffic scenarios including acceleration and deceleration, and the car-following behavior characteristics of CAV in V2 V environment were analyzed. The traffic flow safety levels with different communication distances and penetration rates of CAV were analyzed with simulation. A fundamental diagram model of mixed traffic flows with different penetration rates of CAV was constructed. Analysis result shows that the traffic flow stability region increases with the increase of considered preceding vehicles numbers, and when only considering one preceding vehicle, the longer the distance between the preceding vehicle and ego vehicle, the bigger the influence of velocity coefficient on the C-LCM stability region. The C-LCM can respond to the behaviors of multiple preceding vehicles in advance and simulate the dynamics characteristics of connected autonomous vehicles better. In the deceleration scenario, the speed overshoot decreases from 0.15 to 0.08, and the maximum speed delay decreases from 7.5 s to 4.9 s. In the acceleration scenario, the speed overshoot decreases from 0.07 to 0.04 and the minimum speed delay decreases from 3.5 s to 2.6 s. With the increase of CAV penetration rate, the safety level of traffic flow increases. The highest safety level is achieved with four CAVs in communication distance, and the TIT and TET indexes decrease by 57.22% and 59.08%, respectively. With the increase of CAV penetration rate, the highway capacity increases from 1 281 veh·h-1 to 3 204 veh·h-1. So the proposed C-LCM can describe the car-following characteristics of different vehicles to achieve the modeling of mixed traffic flow, decrease the complexity of mixed traffic flow, and provide a reference for the impact analysis of CAV on traffic flow.
-

图 3 C-LCM稳定域随不同参数的变化
Figure 3. Variations of C-LCM stability regions with different parameters

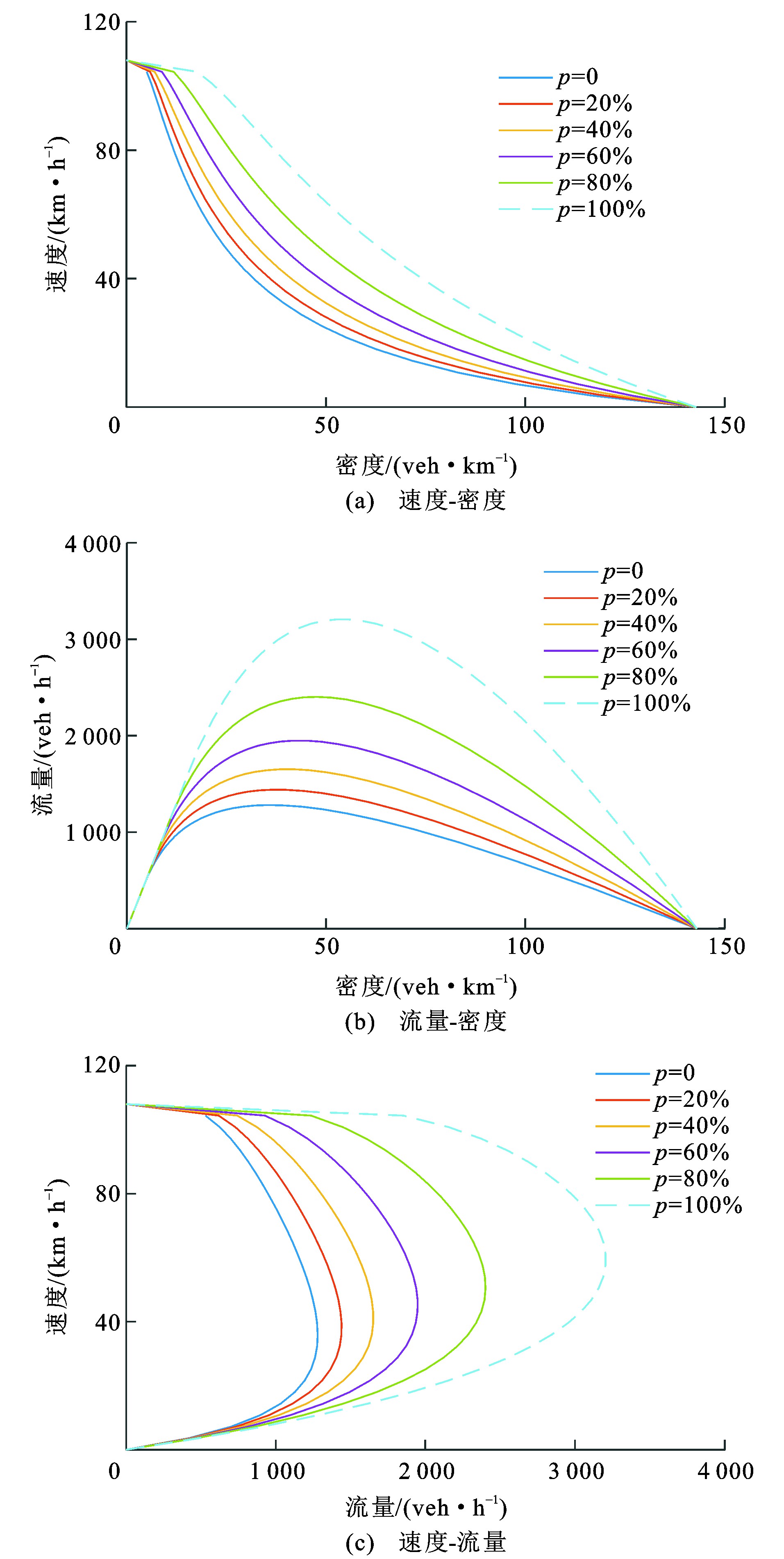
图 6 不同CAV渗透率对混合交通流基本图的影响
Figure 6. Influences of CAV with different penetration rates on mixed traffic flow fundamental diagram
表 1 LCM仿真参数取值
Table 1. Values of LCM simulation parameters
参数 vf/(m·s-1) An/(m·s-2) Bn-1/(m·s-2) 取值 30 4 4 参数 bn/(m·s-2) l/m τn/s 取值 4 7 1  下载: 导出CSV
下载: 导出CSV
表 2 通信距离内CAV数量对TET指标的影响
Table 2. Impacts of CAV numbers in communication distance on TET index
通信距离内CAV数量 不同d0(s)取值的D1计算值 1.0 1.5 2.0 2.5 3.0 0 436.00 441.72 446.13 450.49 454.60 1 216.72 227.73 233.64 238.44 243.24 2 194.42 206.41 212.95 217.93 222.72 3 192.63 200.88 206.49 210.91 215.46 4 186.54 194.47 200.00 204.55 208.94 5 187.57 195.28 201.32 205.40 209.78
下载: 导出CSV
表 3 通信距离内CAV数量对TIT指标的影响
Table 3. Impacts of CAV numbers in communication distance on TIT index
通信距离内CAV数量 不同d0(s)取值的D2计算值 1.0 1.5 2.0 2.5 3.0 0 430.00 650.05 871.99 1 096.00 1 322.40 1 201.32 313.23 424.61 546.59 667.03 2 183.34 284.04 388.93 496.61 606.70 3 180.49 279.02 380.90 485.26 591.81 4 175.95 271.36 370.07 471.25 574.60 5 177.64 273.49 372.63 474.22 578.00
下载: 导出CSV
表 4 不同CAV渗透率对TET指标的影响
Table 4. Impacts of CAV with different penetration rates on TET index
CAV渗透率/% 不同d0(s)取值的D1计算值 1.0 1.5 2.0 2.5 3.0 10 365.08 368.03 371.56 387.76 393.98 20 334.99 345.00 352.53 368.75 372.95 30 313.18 318.36 323.02 327.33 331.61 40 298.30 304.59 318.41 322.89 337.35 50 283.80 296.17 305.96 315.40 321.78 60 265.33 276.82 290.64 297.01 302.29 70 248.31 264.93 279.78 287.22 299.58 80 225.66 243.29 258.12 262.52 276.73 90 203.94 215.61 223.51 223.96 232.20 100 186.54 194.47 200.00 204.55 208.94
下载: 导出CSV
表 5 不同CAV渗透率对TIT指标的影响
Table 5. Impacts of CAV with different penetration rates on TIT index
CAV渗透率/% 不同d0(s)取值的D2计算值 1.0 1.5 2.0 2.5 3.0 10 365.54 562.33 751.47 952.80 1 136.27 20 345.41 540.17 709.28 912.60 1 084.06 30 327.51 485.43 675.76 862.36 983.13 40 312.53 462.03 626.02 786.36 958.95 50 298.96 451.73 614.00 745.60 868.44 60 279.39 438.46 582.06 728.97 780.08 70 238.30 356.89 489.06 651.56 727.30 80 212.51 326.79 449.63 554.79 687.14 90 201.78 310.72 429.24 528.09 629.16 100 175.95 271.36 370.07 471.25 574.60
下载: 导出CSV
-
[1] GE J I, OROSZ G. Dynamics of connected vehicle systems with delayed acceleration feedback[J]. Transportation Research Part C: Emerging Technologies, 2014, 46: 46-64. doi: 10.1016/j.trc.2014.04.014 [2] MILANÉS V, SHLADOVER S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. doi: 10.1016/j.trc.2014.09.001 [3] 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. doi: 10.3969/j.issn.1001-7372.2017.10.016QIN Yan-yan, WANG Hao, WANG Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. (in Chinese). doi: 10.3969/j.issn.1001-7372.2017.10.016 [4] RAJAMANI R, SHLADOVER S E. An experimental comparative study of autonomous and co-operative vehicle-follower control systems[J]. Transportation Research Part C: Emerging Technologies, 2001, 9(1): 15-31. doi: 10.1016/S0968-090X(00)00021-8 [5] VAN NUNEN E, KWAKKERNAAT M R J A E, PLOEG J, et al. Cooperative competition for future mobility[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(3): 1018-1025. doi: 10.1109/TITS.2012.2200475 [6] YU Shao-wei, SHI Zhong-ke. An extended car-following model at signalized intersections[J]. Physica A: Statistical Mechanics and its Applications, 2014, 407: 152-159. doi: 10.1016/j.physa.2014.03.081 [7] YU Shao-wei, SHI Zhong-ke. The effects of vehicular gap changes with memory on traffic flow in cooperative adaptive cruise control strategy[J]. Physica A: Statistical Mechanics and its Applications, 2015, 428: 206-223. doi: 10.1016/j.physa.2015.01.064 [8] YU Shao-wei, SHI Zhong-ke. An improved car-following model considering relative velocity fluctuation[J]. Communications in Nonlinear Science and Numerical Simulation, 2016, 36: 319-326. doi: 10.1016/j.cnsns.2015.11.011 [9] 秦严严, 王昊, 冉斌. 考虑多前车反馈的智能网联车辆跟驰模型[J]. 交通运输系统工程与信息, 2018, 18(3): 48-54. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201803008.htmQIN Yan-yan, WNAG Hao, RAN Bin. Car-following model of connected and autonomous vehicles considering multiple feedbacks[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(3): 48-54. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201803008.htm [10] TANG Tie-qiao, SHI Wei-fang, SHANG Hua-yan, et al. A new car-following model with consideration of inter-vehicle communication[J]. Nonlinear Dynamics, 2014, 76(4): 2017-2023. doi: 10.1007/s11071-014-1265-9 [11] GUO Lan-tian, ZHAO Xiang-mo, YU Shao-wei, et al. An improved car-following model with multiple preceding cars' velocity fluctuation feedback[J]. Physica A: Statistical Mechanics and its Applications, 2017, 471: 436-444. doi: 10.1016/j.physa.2016.12.071 [12] LI Zhi-peng, LI Wen-zhong, XU Shang-zhi, et al. Stability analysis of an extended intelligent driver model and its simulations under open boundary condition[J]. Physica A: Statistical Mechanics and its Applications, 2015, 419: 526-536. doi: 10.1016/j.physa.2014.10.063 [13] JIN P J, YANG Da, RAN Bin, et al. Bidirectional control characteristics of general motors and optimal velocity car-following models[J]. Transportation Research Record, 2013(2381): 110-119. [14] TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 143-163. doi: 10.1016/j.trc.2016.07.007 [15] JIN P J, ZHANG Guo-hui, WALTON C M, et al. Analyzing the impact of false-accident cyber attacks on traffic flow stability in connected vehicle environment[C]//IEEE. 2013 International Conference on Connected Vehicles and Expo. New York: IEEE, 2013: 616-621. [16] YAO Zhi-hong, HU Rong, WANG Yi, et al. Stability analysis and the fundamental diagram for mixed connected automated and human-driven vehicles[J]. Physica A: Statistical Mechanics and its Applications, 2019, 533: 121931-1-16. doi: 10.1016/j.physa.2019.121931 [17] 秦严严, 王昊, 冉斌. CACC车辆跟驰建模及混合交通流分析[J]. 交通运输系统工程与信息, 2018, 18(2): 60-65. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201802010.htmQIN Yan-yan, WANG Hao, RAN Bin. Car-following modeling for CACC vehicles and mixed traffic flow analysis[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(2): 60-65. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201802010.htm [18] 王祺, 谢娜, 侯德藻, 等. 自适应巡航及协同式巡航对交通流的影响分析[J]. 中国公路学报, 2019, 32(6): 188-197, 205. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906020.htmWNAG Qi, XIE Na, HOU De-zao, et al. Effects of adaptive cruise control and cooperative adaptive cruise control on traffic flow[J]. China Journal of Highway and Transport, 2019, 32(6): 188-197, 205. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906020.htm [19] YUAN Yao-ming, JIANG Rui, HU Mao-bin, et al. Traffic flow characteristics in a mixed traffic system consisting of ACC vehicles and manual vehicles: a hybrid modelling approach[J]. Physica A: Statistical Mechanics and its Applications, 2009, 388(12): 2483-2491. doi: 10.1016/j.physa.2009.02.033 [20] QIN Yan-yan, WANG Hao, RAN Bin. Stability analysis of connected and automated vehicles to reduce fuel consumption and emissions[J]. Journal of Transportation Engineering, Part A: Systems, 2018, 144(11): 04018068-1-9. doi: 10.1061/JTEPBS.0000196 [21] ZHU Wen-xing, ZHANG H M. Analysis of mixed traffic flow with human-driving and autonomous cars based on car-following model[J]. Physica A: Statistical Mechanics and its Applications, 2018, 496: 274-285. doi: 10.1016/j.physa.2017.12.103 [22] YE Lan-hang, YAMAMOTO T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput[J]. Physica A: Statistical Mechanics and its Applications, 2018, 512: 588-597. doi: 10.1016/j.physa.2018.08.083 [23] NGODUY D. Analytical studies on the instabilities of heterogeneous intelligent traffic flow[J]. Communications in Nonlinear Science and Numerical Simulation, 2013, 18(10): 2699-2706. doi: 10.1016/j.cnsns.2013.02.018 [24] SUN Jie, ZHENG Zu-duo, SUN Jian. Stability analysis methods and their applicability to car-following models in conventional and connected environments[J]. Transportation Research Part B: Methodological, 2018, 109: 212-237. doi: 10.1016/j.trb.2018.01.013 [25] 秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130. doi: 10.3969/j.issn.1671-1637.2017.03.013QIN Yan-yan, WANG Hao, WANG Wei, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. (in Chinese). doi: 10.3969/j.issn.1671-1637.2017.03.013 [26] NI Dai-heng, LEONARD J D, JIA Chao-qun, et al. Vehicle longitudinal control and traffic stream modeling[J]. Transportation Science, 2016, 50(3): 1016-1031. [27] NI Dai-heng, HSIEH H K, JIANG Tao. Modeling phase diagrams as stochastic processes with application in vehicular traffic flow[J]. Applied Mathematical Modelling, 2018, 53: 106-117. doi: 10.1016/j.apm.2017.08.029 [28] ZHENG Liang, HE Zheng-bing, HE Tian. A flexible traffic stream model and its three representations of traffic flow[J]. Transportation Research Part C: Emerging Technologies, 2017, 75: 136-167. [29] MINDERHOUD M M, BOVY P H L. Extended time-to-collision measures for road traffic safety assessment[J]. Accident Analysis and Prevention, 2001, 33(1): 89-97. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 1541
- HTML全文浏览量: 316
- PDF下载量: 422
- 被引次数: 0
