

Longitudinal and lateral coordination control method of high-speed unmanned vehicles with integrated stability
-
摘要: 提出了一种纵横向协调控制的路径跟踪控制方法; 建立了车辆预瞄误差模型和考虑路面地形的高速车辆等效动力学模型, 以此引入道路曲率地形因素; 基于模糊规则设计了预瞄距离发生器, 解决预瞄误差模型中固定预瞄距离的问题; 建立了预测时域与道路曲率的函数关系, 运用模型预测控制算法求解前轮转角, 从而建立路径跟踪控制器; 运用指数模型表示车辆期望车速, 设计了比例积分微分纵向控制器控制车速以改善路径跟踪精度; 运用质心侧偏角相平面图表征车辆稳定性特征, 设计比例积分微分稳定性控制器以改善车辆稳定性。研究结果表明: 提出的控制方法能在不同附着系数路面上对车辆跟踪性能进行优化, 在干燥沥青路面以车速90 km·h-1行驶时, 与只运用模型预测控制算法进行路径跟踪控制的车辆相比, 最大横向误差可减少33%;在潮湿沥青路面以车速70 km·h-1行驶时, 与只运用模型预测控制算法进行路径跟踪控制的车辆相比, 最大横向误差可减少30%;在冰雪路面以车速55 km·h-1行驶时, 与只运用模型预测控制算法进行路径跟踪控制的车辆相比, 最大横向误差可减少16%。可见, 所提出的控制方法能有效改善路径跟踪精度。Abstract: A path tracking control method considering longitudinal and lateral coordination control was proposed. The vehicle preview error model and high-speed vehicle equivalent dynamics model considering road surface terrain were established to introduce road curvature terrain factors. The preview distance generator based on the fuzzy rules was designed to solve the problem of fixed preview distance in the preview error model. The function relationship between the time domain and the road curvature was established. The model predictive control algorithm was used to solve the front wheel rotation angle, thereby establishing a path tracking controller. The expected vehicle speed was represented by the exponential model, and the proportion integration differentiation longitudinal controller was designed to improve the path tracking accuracy. The vehicle stability characteristic was represented by phase plane of slip angle, and the proportion integration differentiation stability controller was designed to improve the vehicle stability. Research result shows that the control method can optimize the vehicle tracking performance on the roads with different adhesion coefficients. When driving on a dry asphalt pavement at a speed of 90 km·h-1, the maximum lateral error reduces by 33% compared with a vehicle that only uses model predictive control algorithm for path tracking control. When driving on a wet asphalt pavement at a speed of 70 km·h-1, the maximum lateral error reduces by 30% compared with a vehicle that only uses model predictive control algorithm for path tracking control. When driving on an icy and snow pavement at a speed of 55 km·h-1, the maximum lateral error reduces by 16% compared with a vehicle that only uses model predictive control algorithm for path tracking control. Therefore, the proposed control method can effectively improve the path tracking accuracy.
-
Key words:
- unmanned vehicle /
- path tracking /
- longitudinal and lateral control /
- fuzzy control /
- stability
-

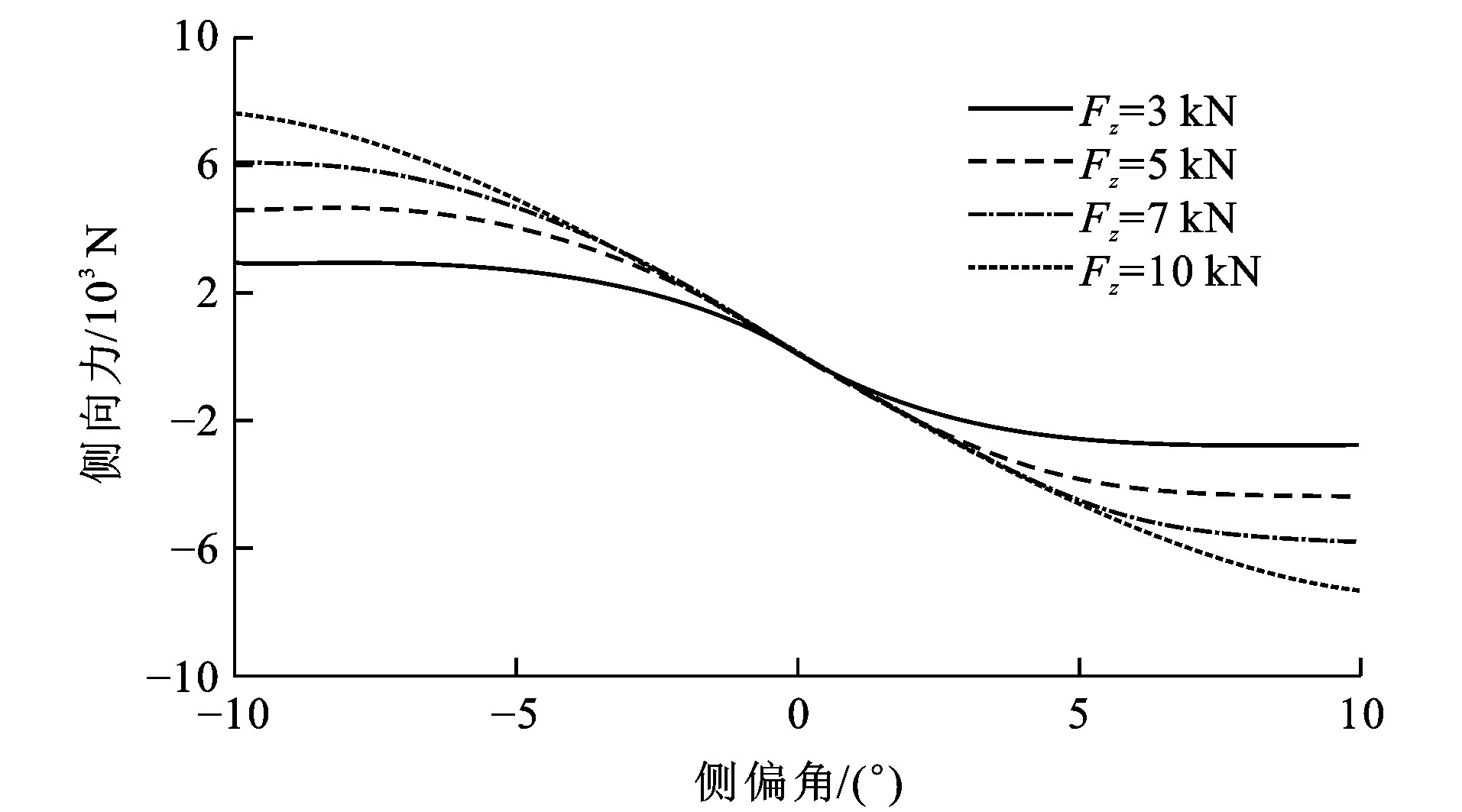
图 2 车轮侧向力与侧偏角关系曲线
Figure 2. Relationship curves between lateral force and side angle of tire

图 8 70km·h-1干燥沥青路面路径跟踪仿真结果
Figure 8. Path tracking simulation results on dry asphalt pavement at 70 km·h-1

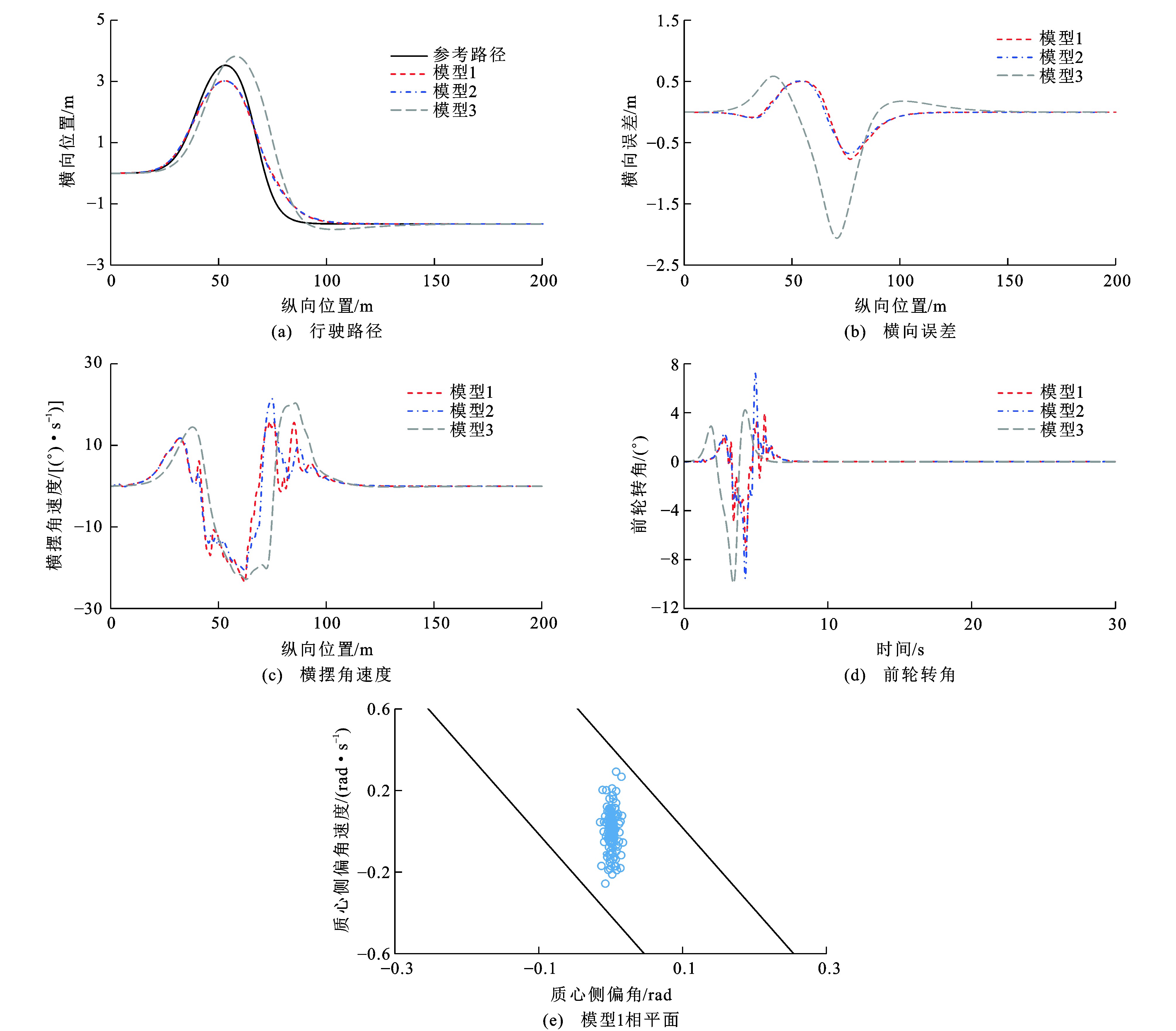
图 9 90km·h-1干燥沥青路面路径跟踪仿真结果
Figure 9. Path tracking simulation results on dry asphalt pavement at 90 km·h-1

图 10 60km·h-1潮湿沥青路面路径跟踪仿真结果
Figure 10. Path tracking simulation results on wet asphalt pavement at 60 km·h-1

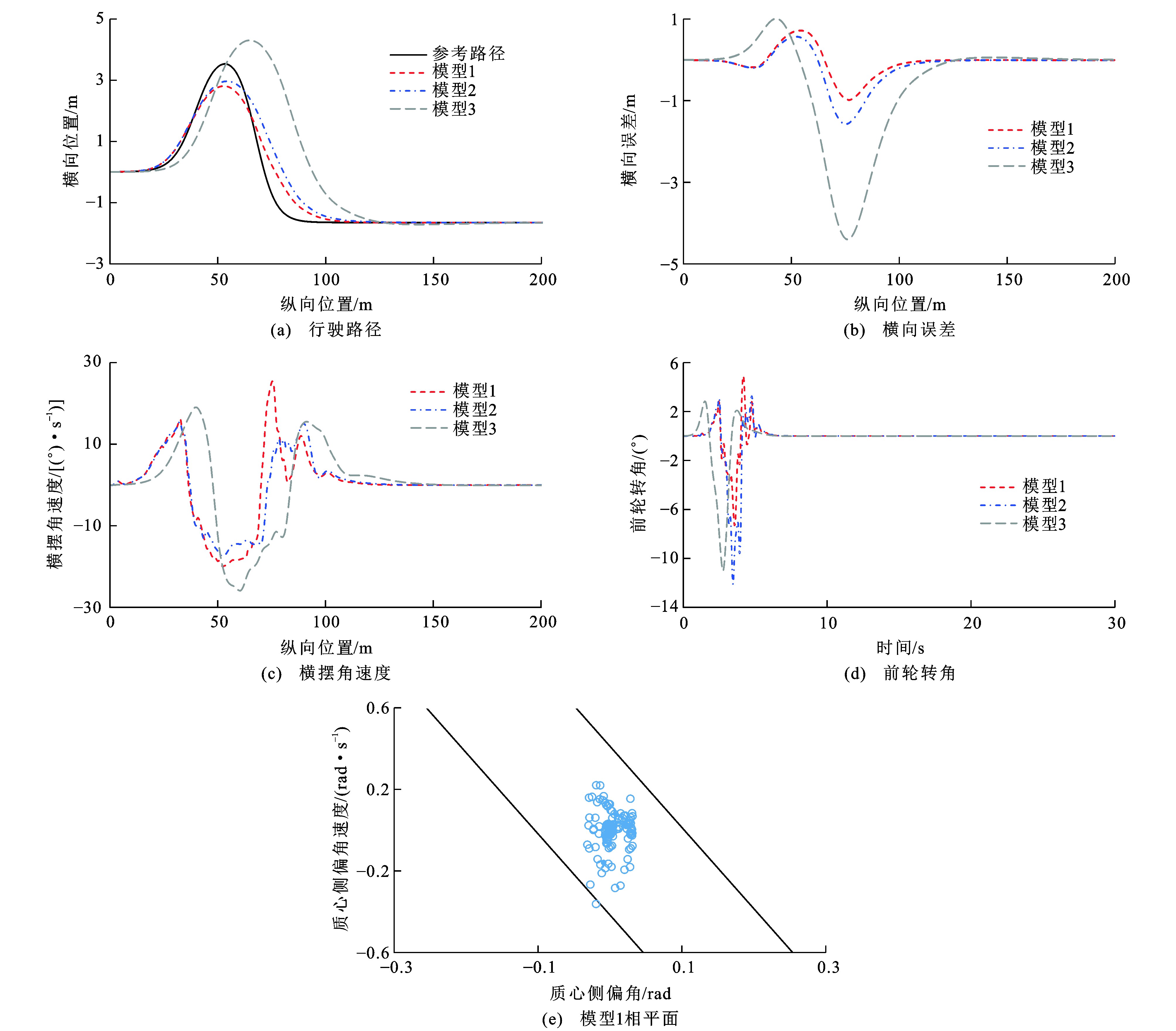
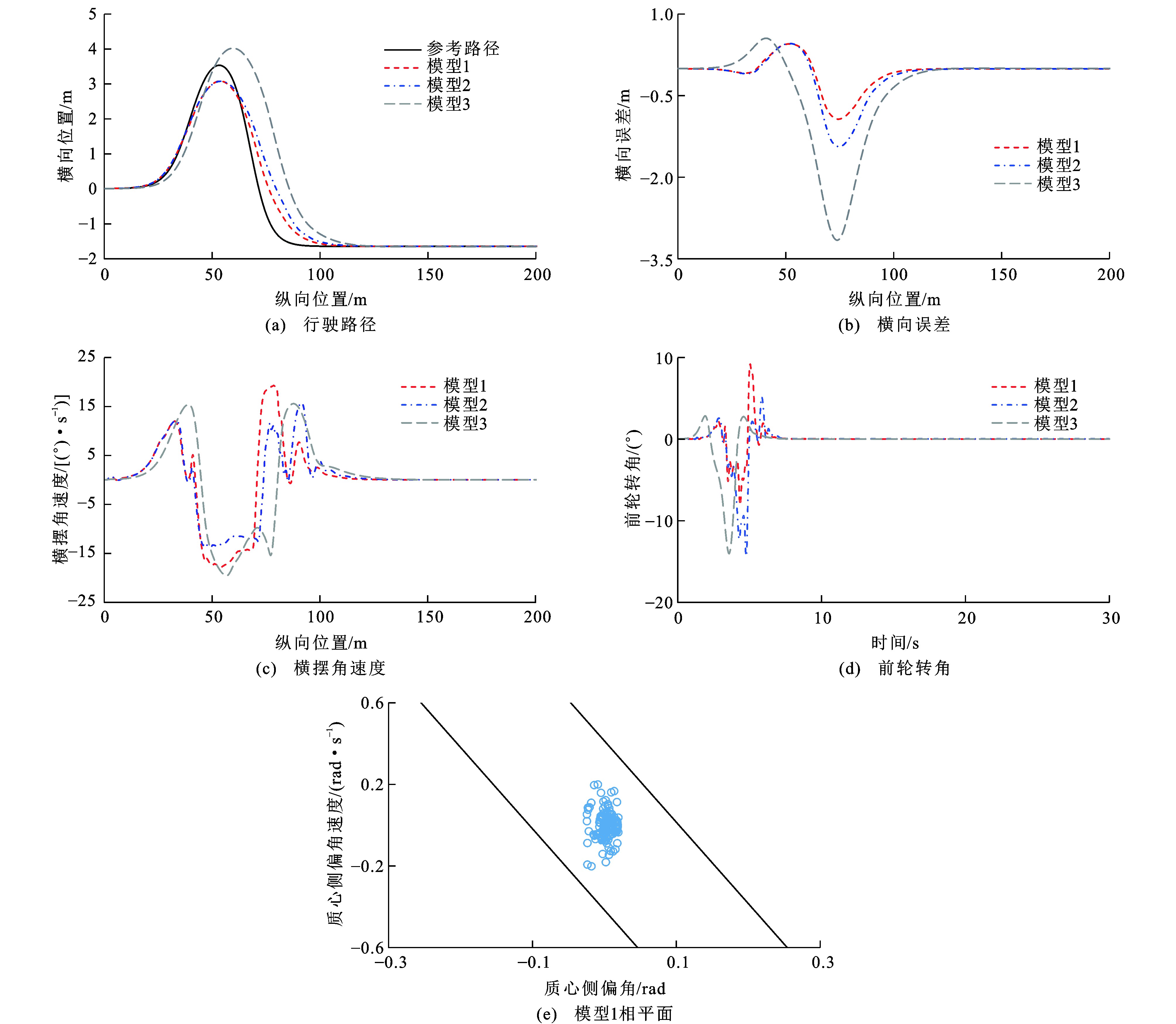
图 11 70km·h-1潮湿沥青路面路径跟踪仿真结果
Figure 11. Path tracking simulation results on wet asphalt pavement at 70 km·h-1

图 12 50km·h-1冰雪路面路径跟踪仿真结果
Figure 12. Path tracking simulation results on icy and snowy pavement at 50 km·h-1

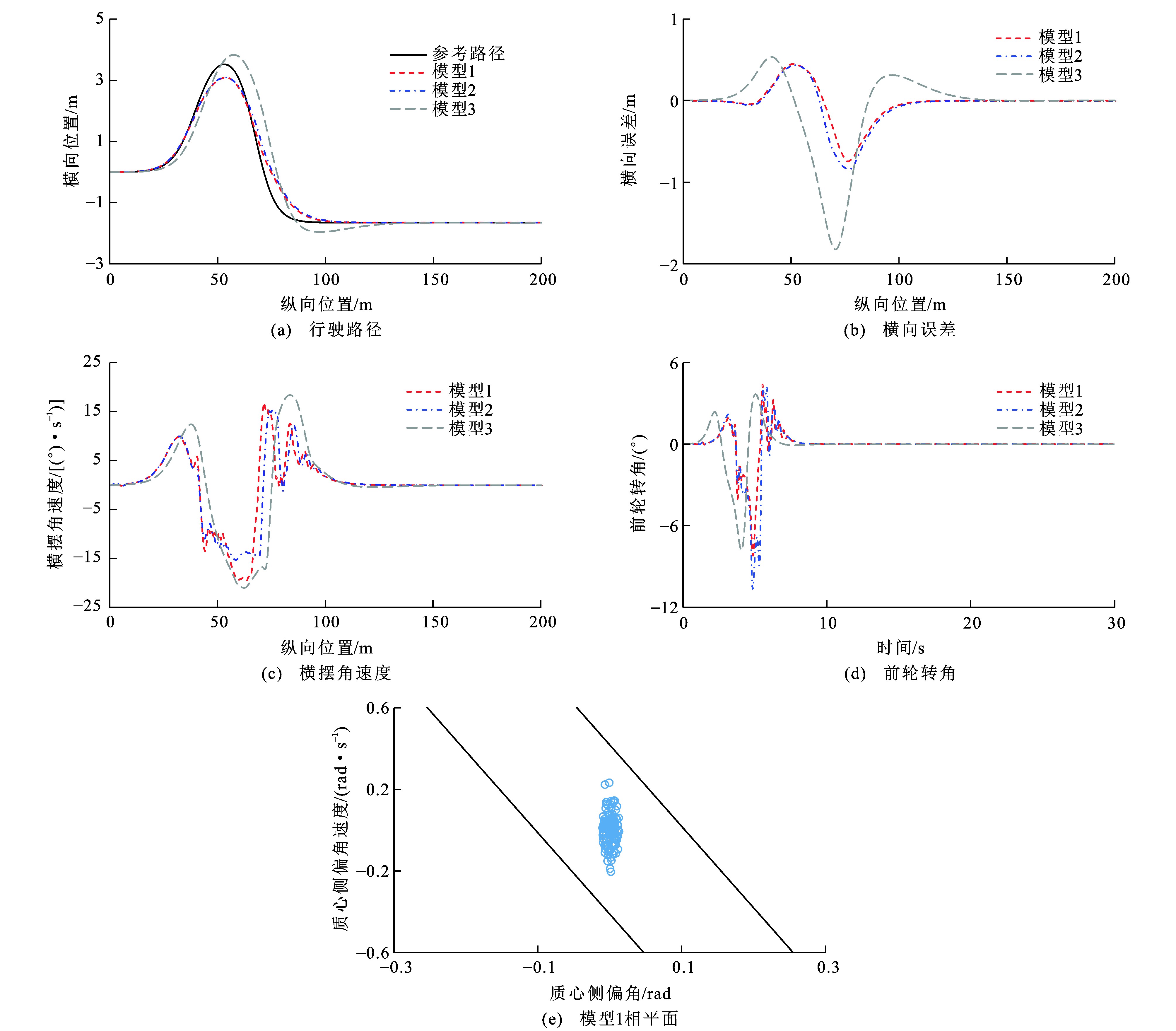
图 13 55km·h-1冰雪路面路径跟踪仿真结果
Figure 13. Path tracking simulation results on icy and snowy pavement at 55 km·h-1
表 1 制动规则
Table 1. Braking rules
工况 转向特性 制动情况 1 δ > 0, e4 > 0 过多转向 右侧轮 2 δ > 0, e4 < 0 不足转向 左侧轮 3 δ < 0, e4 < 0 过多转向 左侧轮 4 δ < 0, e4 > 0 不足转向 右侧轮  下载: 导出CSV
下载: 导出CSV
表 2 车辆基本参数
Table 2. Vehicle basic parameters
参数 数值 m/kg 1 723 I1/(kg·m2) 4 175 I2/(kg·m2) 1 243 H1/(N·m·rad-1) 145 330 H2/(N·m·rad-1) 4 500 a/m 1.232 b/m 1.468 A1/(N·rad-1) 66 900 A2/(N·rad-1) 62 700 W/m 0.3 h/m 0.54
下载: 导出CSV
-
[1] YAKUB F, MORI Y. Comparative study of autonomous path-following vehicle control via model predictive control and linear quadratic control[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2015, 229(12): 1695-1714. doi: 10.1177/0954407014566031 [2] 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2): 151-159. doi: 10.3969/j.issn.1674-8484.2016.02.003GUO Jing-hua, LI Ke-qiang, LUO Yu-gong. Review on the research of motion control for intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2016, 7(2): 151-159. (in Chinese). doi: 10.3969/j.issn.1674-8484.2016.02.003 [3] 林棻, 倪兰青, 赵又群, 等. 考虑横向稳定性的智能车辆路径跟踪控制[J]. 华南理工大学学报(自然科学版), 2018, 46(1): 78-84. doi: 10.3969/j.issn.1000-565X.2018.01.010LIN Fen, NI Lan-qing, ZHAO You-qun, et al. Path following control of intelligent vehicles considering lateral stability[J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(1): 78-84. (in Chinese). doi: 10.3969/j.issn.1000-565X.2018.01.010 [4] 朱敏, 陈慧岩. 无人驾驶越野车辆纵向速度跟踪控制试验[J]. 机械工程学报, 2018, 54(24): 111-117. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824013.htmZHU Min, CHEN Hui-yan. Experiment on longitudinal speed tracking control for unmanned off-road vehicles[J]. Journal of Mechanical Engineering, 2018, 54(24): 111-117. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824013.htm [5] LENG Zhe, MINOR M A. Curvature-based ground vehicle control of trailer path following considering sideslip and limited steering actuation[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2): 332-348. doi: 10.1109/TITS.2016.2572208 [6] 陈特, 陈龙, 徐兴, 等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41(10): 1109-1116. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201910001.htmCHEN Te, CHEN Long, XU Xing, et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41(10): 1109-1116. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201910001.htm [7] 余卓平, 侯誉烨, 熊璐, 等. 基于反步法的差动转向无人车辆轨迹跟踪[J]. 汽车工程, 2019, 41(11): 1229-1234, 1242. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201911002.htmYU Zhuo-ping, HOU Yu-ye, XIONG Lu, et al. Trajectory tracking of skid steer unmanned vehicle based on backstepping[J]. Automotive Engineering, 2019, 41(11): 1229-1234, 1242. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201911002.htm [8] 刁勤晴, 张雅妮, 朱凌云. 双预瞄点智能车大曲率路径的横纵向模糊控制[J]. 中国机械工程, 2019, 30(12): 1445-1452. doi: 10.3969/j.issn.1004-132X.2019.12.010DIAO Qin-qing, ZHANG Ya-ni, ZHU Ling-yun. A lateral and longitudinal fuzzy control of intelligent vehicles with double preview points for large curvature roads[J]. China Mechanical Engineering, 2019, 30(12): 1445-1452. (in Chinese). doi: 10.3969/j.issn.1004-132X.2019.12.010 [9] 赵治国, 周良杰, 朱强. 无人驾驶车辆路径跟踪控制预瞄距离自适应优化[J]. 机械工程学报, 2018, 54(24): 166-173. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824020.htmZHAO Zhi-guo, ZHOU Liang-jie, ZHU Qiang. Preview distance adaptive optimization for the path tracking control of unmanned vehicle[J]. Journal of Mechanical Engineering, 2018, 54(24): 166-173. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824020.htm [10] 李爽, 徐延海, 陈静, 等. 基于弧长预瞄的车辆侧向跟踪控制研究[J]. 汽车工程, 2019, 41(6): 668-675. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201906010.htmLI Shuang, XU Yan-hai, CHEN Jing, et al. A study on vehicle lateral tracking control based on arc-length preview[J]. Automotive Engineering, 2019, 41(6): 668-675. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201906010.htm [11] 吴艳, 王丽芳, 李芳. 基于滑模自抗扰的智能车路径跟踪控制[J]. 控制与决策, 2019, 34(10): 2150-2156. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201910012.htmWU Yan, WANG Li-fang, LI Fang. Intelligent vehicle path following control based on sliding mode active disturbance rejection[J]. Control and Decision, 2019, 34(10): 2150-2156. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201910012.htm [12] 汪伟, 赵又群, 许健雄, 等. 基于模糊控制的汽车路径跟踪研究[J]. 中国机械工程, 2014, 25(18): 2532-2538. doi: 10.3969/j.issn.1004-132X.2014.18.023WANG Wei, ZHAO You-qun, XU Jian-xiong, et al. Research on vehicle path tracking based on fuzzy control[J]. China Mechanical Engineering, 2014, 25(18): 2532-2538. (in Chinese). doi: 10.3969/j.issn.1004-132X.2014.18.023 [13] JI Jie, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. doi: 10.1109/TVT.2016.2555853 [14] LIU Kai, GONG Jian-wei, KURT A, et al. Dynamic modeling and control of high-speed automated vehicles for lane change maneuver[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(3): 329-339. doi: 10.1109/TIV.2018.2843177 [15] 张亮修, 吴光强, 郭晓晓. 自主车辆线性时变模型预测路径跟踪控制[J]. 同济大学学报(自然科学版), 2016, 44(10): 1595-1603. doi: 10.11908/j.issn.0253-374x.2016.10.018ZHANG Liang-xiu, WU Guang-qiang, GUO Xiao-xiao. Path tracking using linear time-varying model predictive control for autonomous vehicle[J]. Journal of Tongji University (Natural Science), 2016, 44(10): 1595-1603. (in Chinese). doi: 10.11908/j.issn.0253-374x.2016.10.018 [16] GUO Jing-hua, LUO Yu-gong, LI Ke-qiang, et al. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation[J]. Mechanical Systems and Signal Processing, 2018, 105: 183-199. doi: 10.1016/j.ymssp.2017.12.018 [17] BROWN M, FUNKE J, ERLIEN S, et al. Safe driving envelopes for path tracking in autonomous vehicles[J]. Control Engineering Practice, 2017, 61: 307-316. doi: 10.1016/j.conengprac.2016.04.013 [18] GUO Hong-yan, LIU Jun, CAO Dong-pu, et al. Dual-envelop-oriented moving horizon path tracking control for fully automated vehicles[J]. Mechatronics, 2018, 50: 422-433. doi: 10.1016/j.mechatronics.2017.02.001 [19] 刘凯, 陈慧岩, 龚建伟, 等. 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5): 514-521. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201905007.htmLIU Kai, CHEN Hui-yan, GONG Jian-wei, et al. A research on handling stability of high-speed unmanned vehicles[J]. Automotive Engineering, 2019, 41(5): 514-521. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201905007.htm [20] KIM E, KIM J, SUNWOO M. Model predictive control strategy for smooth path tracking of autonomous vehicles with steering actuator dynamics[J]. International Journal of Automotive Technology, 2014, 15(7): 1155-1164. doi: 10.1007/s12239-014-0120-9 [21] 张亮修, 张铁柱, 吴光强. 考虑误差校正的智能车辆路径跟踪鲁棒预测控制[J]. 西安交通大学学报, 2020, 54(3): 20-27. https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT202003003.htmZHANG Liang-xiu, ZHANG Tie-zhu, WU Guang-qiang. Robust predictive control for intelligent vehicle path tracking considering error feedback correction[J]. Journal of Xi'an Jiaotong University, 2020, 54(3): 20-27. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT202003003.htm [22] 白国星, 孟宇, 刘立, 等. 基于可变预测时域及速度的车辆路径跟踪控制[J]. 中国机械工程, http://kns.cnki.net/kcms/detail/421294.TH.20190610.1702.004.html..BAI Guo-xing, MENG Yu, LIU Li, et al. Path tracking control of vehicles based on variable prediction horizon and velocity[J]. China Mechanical Engineering, http://kns.cnki.net/kcms/detail/42.1294.TH.20190610.1702.004.html. (inChinese). [23] PACEJKA H B, BESSELINK I J M. Magic formula tyre model with transient properties[J]. Vehicle System Dynamics, 1997, 27(S1): 13-29. [24] KUWATA Y, TEO J, FIORE G, et al. Real-time motion planning with applications to autonomous urban driving[J]. IEEE Transactions on Control Systems Technology, 2009, 17(5): 1105-1118. doi: 10.1109/TCST.2008.2012116 [25] STANKIEWICZ P G, BROWN A A, BRENNAN S N. Preview horizon analysis for vehicle rollover prevention using the zero-moment point[J]. Journal of Dynamic Systems, Measurement, and Control, 2015, 137(9): 091002-1-12. doi: 10.1115/1.4030390 [26] 刘凯, 龚建伟, 陈舒平, 等. 高速无人驾驶车辆最优运动规划与控制的动力学建模分析[J]. 机械工程学报, 2018, 54(14): 141-151. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201814017.htmLIU Kai, GONG Jian-wei, CHEN Shu-ping, et al. Dynamic modeling analysis of optimal motion planning and control for high-speed self-driving vehicles[J]. Journal of Mechanical Engineering, 2018, 54(14): 141-151. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201814017.htm [27] 王艺, 蔡英凤, 陈龙, 等. 基于模型预测控制的智能网联汽车路径跟踪控制器设计[J]. 机械工程学报, 2019, 55(8): 136-144, 153. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201908019.htmWANG Yi, CAI Ying-feng, CHEN Long, et al. Design of intelligent and connected vehicle path tracking controller based on model predictive control[J]. Journal of Mechanical Engineering, 2019, 55(8): 136-144, 153. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201908019.htm [28] 汪若尘, 魏振东, 叶青, 等. 视觉预瞄式智能车辆纵横向协同控制研究[J]. 汽车工程, 2019, 41(8): 763-770, 830. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201907006.htmWANG Ruo-chen, WEI Zhen-dong, YE Qing, et al. A research on visual preview longitudinal and lateral cooperative control of intelligent vehicle[J]. Automotive Engineering, 2019, 41(8): 763-770, 830. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201907006.htm [29] 金辉, 李世杰. 基于极限车速的车辆稳定性控制研究[J]. 汽车工程, 2018, 40(1): 48-56. doi: 10.3969/j.issn.1674-6546.2018.01.013JIN Hui, LI Shi-jie. A research on vehicle stability control based on limited speed[J]. Automotive Engineering, 2018, 40(1): 48-56. (in Chinese). doi: 10.3969/j.issn.1674-6546.2018.01.013 [30] CHUNG T Y, YI K K. Design and evaluation of side slip angle-based vehicle stability control scheme on a virtual test track[J]. IEEE Transactions on Control Systems Technology, 2006, 14(2): 224-234. doi: 10.1109/TCST.2005.863649 -




 点击查看大图
点击查看大图
计量
- 文章访问数: 1382
- HTML全文浏览量: 553
- PDF下载量: 484
- 被引次数: 0
