

Model-free adaptive sliding mode vector control for podded propulsion motor
Article Text (Baidu Translation)
-
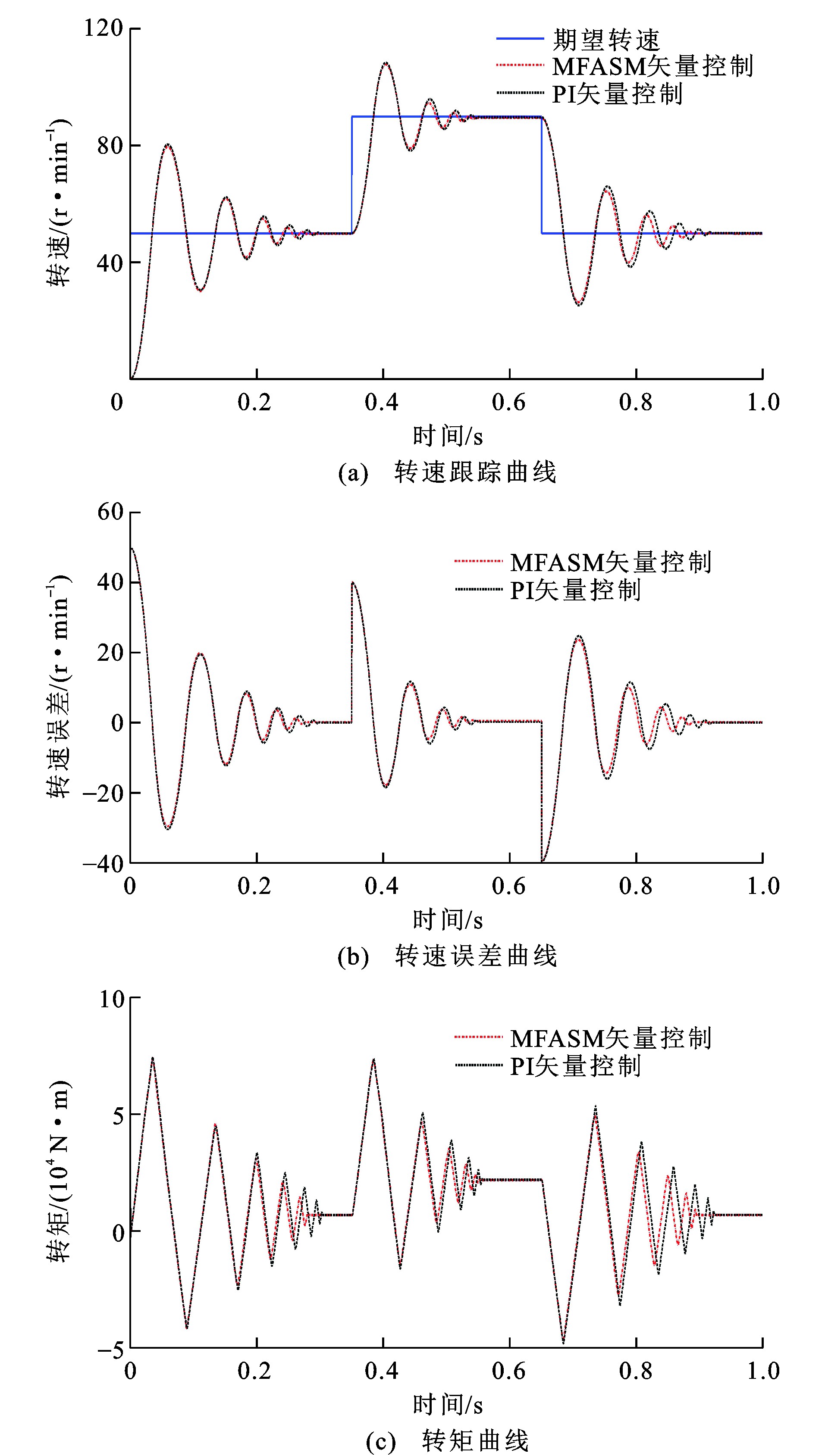
摘要: 为解决半潜船吊舱推进电机控制系统中负载扰动造成的转速跟踪性能差的问题, 提出一种基于数据驱动的吊舱推进电机转速矢量控制方法; 对包含未知负载扰动的推进电机转速方程进行离散化处理, 给出关于输出转速与输入电流离散后的非线性转速系统; 由于非线性转速系统方程中变量较多且负载扰动模型未知, 设计了基于数据驱动的无模型自适应控制器, 并给出了伪偏导数估计算法; 采用滑模观测器观测螺旋桨负载扰动, 同时给出了滑模控制器; 结合无模型自适应控制和滑模控制给出了负载扰动下的无模型自适应滑模(MFASM)控制方案; 构建了吊舱推进电机无模型自适应滑模矢量控制调速系统, 并在MATLAB/Simulink环境下给出了仿真结果。研究结果表明: 在船舶正常作业恒定转速下, 在0.3~0.5 s时间区域内, 采用MFASM矢量控制方案和PI矢量控制方案的吊舱推进电机的转速误差分别为2、6 r·min-1; 在0.8~1.0 s时间区域内, 采用无模型自适应滑模矢量控制方案和PI矢量控制方案的吊舱推进电机的转速误差分别1、3 r·min-1; 对于船舶操车作业的可变转速情形, 采用MFASM矢量控制方案的推进电机转速和转矩达到稳态的时间比PI矢量控制方案少0.01~0.03 s。可以看出, 采用MFASM矢量控制方案可改善吊舱推进电机转速跟踪性能, 是一种有效的抑制负载扰动的数据驱动控制方法。Abstract: To solve the problem of poor speed tracking performance caused by the load disturbance in the podded propulsion motor control system of semi-submersible ship, a speed vector control method for the podded propulsion motor was proposed based on the data-driven. The speed equation of propulsion motor with unknown load disturbance was discretized, and the nonlinear speed system about the output speed and input current after the discretization was given. Since multiple variables were in the nonlinear speed system equation and the load disturbance model was unknown, the model-free adaptive controller based on the data-driven was designed and the pseudo partial derivative estimation algorithm was given. The sliding mode observer was utilized to observe the propeller load disturbance and a sliding mode controller was given. Combining the model-free adaptive control with the sliding mode control, and the model-free adaptive sliding mode(MFASM) control scheme under the load disturbance was presented. The podded propulsion motor MFASM vector control speed governing system was constructed, and the simulation results were given in the MATLAB/Simulink environment. Research result shows that under the constant speed of ship in the normal operation and within the time range of 0.3-0.5 s, the speed errors of podded propulsion motor under the MFASM vector control scheme and the PI vector control scheme are 2 and 6 r·min-1, respectively. Within the time range of 0.8-1.0 s, the speed errors of podded propulsion motor under the MFASM vector control scheme and the PI vector control scheme are 1 and 3 r·min-1, respectively. For the variable speed case of ship operation, the time for the speed and torque of propulsion motor to the steady-state under the MFASM vector control scheme is 0.01-0.03 s less than that under the PI vector control scheme. Therefore, the speed tracking performance of podded propulsion motor can be improved by utilizing the MFASM vector control scheme, and the proposed method is an effective data-driven control method for suppressing the load disturbance.
-

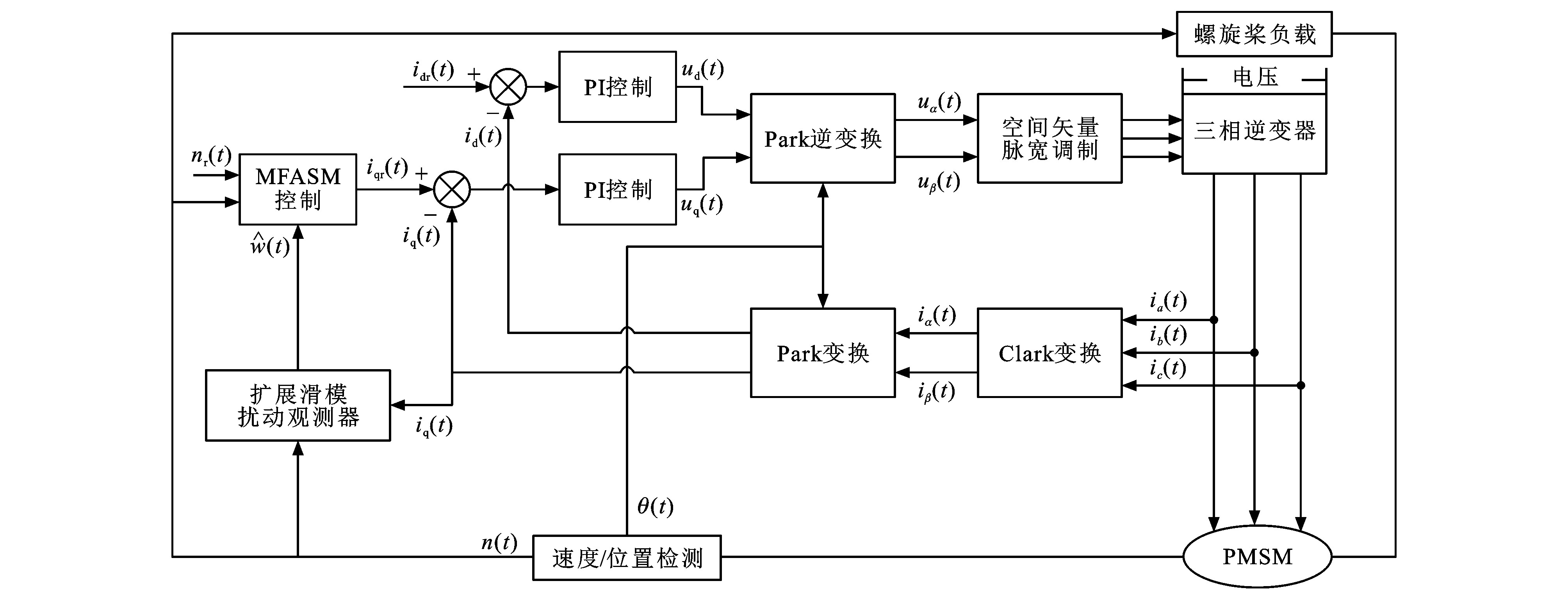
图 2 推进电机无模型自适应滑模矢量控制调速系统
Figure 2. MFASM vector control speed regulating system for propulsion motor

图 3 正常作业下推进电机转速和转矩曲线
Figure 3. Curves of propulsion motor speed and torque under normal operation
-
[1] DU Jia-lu, HU Xin, KRSTĆ M, et al. Robust dynamicpositioning of ships with disturbances under input saturation[J]. Automatic, 2016, 73: 207-214. [2] BENETAZZO F, IPPOLITI G, LONGLI S, et al. Advanced control for fault-tolerant dynamic positioning of an offshore supply vessel[J]. Ocean Engineering, 2015, 106: 472-484. doi: 10.1016/j.oceaneng.2015.07.001 [3] 谢新连, 赵瑞嘉, 李猛, 等. 基于半潜船型的多功能浮力舱技术[J]. 中国造船, 2018, 59(3): 178-184. doi: 10.3969/j.issn.1000-4882.2018.03.019XIE Xin-lian, ZHAO Rui-jia, LI Meng, et al. Technique of multi-functional buoyancy tank applied to semi-submersible ships[J]. Shipbuliding of China, 2018, 59(3): 178-184. (in Chinese). doi: 10.3969/j.issn.1000-4882.2018.03.019 [4] ZHAO Dong-ya, LIANG Hao, SPURGRON S K. Robust adaptive terminal sliding mode control for dynamic positioning of a semi-submersible offshore platform[J]. Transactions of the Institute of Measurement and Control, 2019, 41(5): 1361-1372. doi: 10.1177/0142331218778108 [5] WANG Rui, XIONG Ying, WANG Zhan-zhi. A surface panel method for the analysis of hybrid contra-rotating shaft pod propulsor[J]. Ocean Engineering, 2017, 140: 97-104. doi: 10.1016/j.oceaneng.2017.05.022 [6] 慕东东, 王国峰, 范云生, 等. 吊舱推进无人水面艇的航向保持[J]. 哈尔滨工程大学学报, 2018, 39(2): 274-281. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201802013.htmMU Dong-dong, WANG Guo-feng, FAN Yun-sheng, et al. Study on course keeping of POD propulsion unmanned surface vessel[J]. Journal of Harbin Engineering University, 2018, 39(2): 274-281. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201802013.htm [7] 白洪芬, 朱景伟. 电力推进船舶永磁容错电机矢量控制策略对比分析[J]. 哈尔滨工程大学报, 2017, 38(9): 1484-1490. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201709022.htmBAI Hong-fen, ZHU Jing-wei. Comparative study of vector control strategies for FTPMM applied in ship electric propulsion system[J]. Journal of Harbin Engineering University, 2017, 38(9): 1484-1490. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201709022.htm [8] CHASIOTIS I D, KARNAVAS Y L. A generic multi-criteria design approach toward high power density and fault-tolerant low-speed PMSM for pod applications[J]. IEEE Transactions on Transportation Electrification, 2019, 5(2): 356-370. doi: 10.1109/TTE.2019.2894995 [9] PING Zhao-wu, WANG Tao, HUANG Yun-zhi, et al. Internal model control of PMSM position servo system: theory and experimental results[J]. IEEE Transactions on Industrial Informatics, 2020, 16(4): 2202-2211. doi: 10.1109/TII.2019.2935248 [10] WANG Yao-qiang, FENG Yu-tao, ZHANG Xiao-guang, et al. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 4117-4126. doi: 10.1109/TPEL.2019.2933613 [11] 刘国海, 宋成炎, 徐亮, 等. 基于SVPWM的五相永磁同步电机两相开路故障容错控制策略[J]. 电工技术学报, 2019, 34(1): 23-32. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201901003.htmLIU Guo-hai, SONG Cheng-yan, XU Liang, et al. SVPWM-based fault-tolerant control strategy under two-phase open-circuit fault of five-phase permanent-magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(1): 23-32. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201901003.htm [12] 周凯, 孙彦成, 王旭东, 等. 永磁同步电机的自抗扰控制调速策略[J]. 电机与控制学报, 2018, 22(2): 57-63. https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201802009.htmZHOU Kai, SUN Yan-cheng, WANG Xu-dong, et al. Active disturbance rejection control of PMSM speed control system[J]. Electric Machines and Control, 2018, 22(2): 57-63. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201802009.htm [13] TRIPATHI S M, DUTTA C. Enhanced efficiency in vector control of a surface-mounted PMSM drive[J]. Journal of the Franklin Institute—Engineering and Applied Mathematics, 2018, 35(5): 2392-2423. [14] AN Qun-tao, LIU Jin, PENG Zhuang, et al. Dual-space vector control of open-end winding permanent magnet synchronous motor drive fed by dual inverter[J]. IEEE Transactions on Power Electronics, 2016, 31(12): 8329-8342. [15] OKSUZTEPE E, OMAC Z, KURUM H. Sensorless vector control of PMSM with non-sinusoidal flux using observer based on FEM[J]. Electrical Engineering, 2014, 96(3): 227-238. doi: 10.1007/s00202-013-0294-6 [16] LIU Kai, HOU Chuang, HUA Wei. A novel inertia identification method and its application in PI controllers of PMSM drives[J]. IEEE Access, 2019, 7: 13345-13454. [17] XIE Yuan-long, TANG Xiao-qi, SONG Bao, et al. Model-free tuning strategy of fractional-order PI controller for speed regulation of permanent magnet synchronous motor[J]. Transactions of The Institute of Measurement and Control, 2019, 41(1): 23-35. doi: 10.1177/0142331217751040 [18] WU Shao-fang, ZHANG Jian-wu. A terminal sliding mode observer based robust backstepping sensorless speed control for interior permanent magnet synchronous motor[J]. International Journal of Control Automation and Systems, 2018, 16(6): 2743-2753. doi: 10.1007/s12555-017-0806-7 [19] NING Bo-wen, CHENG Shang-mei, QIN Yi. Direct torque control of PMSM using sliding mode backstepping control with extended state observer[J]. Journal of Vibration and Control, 2018, 24(4): 694-707. doi: 10.1177/1077546316650097 [20] MORAWIEC M. The adaptive backstepping control of permanent magnet synchronous motor supplied by current source inverter[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 1047-1055. doi: 10.1109/TII.2012.2223478 [21] 钟臻峰, 金孟加, 沈建新. 基于分段PI调节器的模型参考自适应永磁同步电动机全转速范围无传感器控制[J]. 中国电机工程学报, 2018, 38(4): 1203-1211. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201804025.htmZHONG Zhen-feng, JIN Meng-jia, SHEN Jian-xin. Full speed range sensorless control of permanent magnet synchronous motor with phased PI regulator-based model reference adaptive system[J]. Proceedings of the CSEE, 2018, 38(4): 1203-1211. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201804025.htm [22] KIVANCO C, OZTURK S B. Sensorless PMSM drive based on stator feedforward voltage estimation improved with MRAS multi-parameter estimation[J]. IEEE/ASME Transactions on Mechatronics, 23(3): 1326-1337. [23] ZOLFAGHARI M, TAHER S A, MUNUZ D V. Neural network-based sensorless direct power control of permanent magnet synchronous motor[J]. Ain Shams Engineering Journal, 2016, 7(2): 729-740. doi: 10.1016/j.asej.2016.01.002 [24] 兰永红, 王亮亮, 陈才学. 基于观测器的永磁同步电机积分反推控制[J]. 系统仿真学报, 2017, 39(8): 1753-1761. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201708015.htmLAN Yong-hong, WANG Liang-liang, CHEN Cai-xue. Observer-based integral backstepping control for permanent magnet synchronous motor[J]. Journal of System Simulation, 2017, 39(8): 1753-1761. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201708015.htm [25] 余洋, 郭旭东, 郑晓明, 等. 基于反推控制的机械弹性储能永磁同步电机最大转矩电流比控制[J]. 电工技术学报, 2017, 32(22): 82-90. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201722009.htmYU Yang, GUO Xu-dong, ZHENG Xiao-ming, et al. Backstepping control based maximum torque per ampere control of permanent magnet synchronous motor for mechanical elastic energy storage[J]. Transactions of China Electrotechnical Society, 2017, 32(22): 82-90. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201722009.htm [26] 林茂, 李颖晖, 吴辰, 等. 基于滑模模型参考自适应系统观测器的永磁同步电机预测控制[J]. 电工技术学报, 2017, 32(6): 156-163. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201706019.htmLIN Mao, LI Ying-hui, WU Chen, et al. A model reference adaptive system based sliding mode observer for model predictive controlled permanent magnet synchronous motor drive[J]. Transactions of China Electrotechnical Society, 2017, 32(6): 156-163. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201706019.htm [27] 刘春强, 刘伊伦, 孔凡一, 等. 基于时变参数扰动观测器补偿的永磁同步电机非光滑速度调节器[J]. 电工技术学报, 2019, 34(4): 664-672. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201904004.htmLIU Chun-qiang, LIU Yi-lun, KONG Fan-yi, et al. Non-smooth speed controller based on time-varying parameter disturbance observer compensation for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(4): 664-672. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201904004.htm [28] 侯忠生. 无模型自适应控制的现状与展望[J]. 控制理论与应用, 2006, 23(4): 586-592. doi: 10.3969/j.issn.1000-8152.2006.04.017HOU Zhong-sheng. On model-free adaptive control: the state of the art and perspective[J]. Control Theory and Applications, 2006, 23(4): 586-592. (in Chinese). doi: 10.3969/j.issn.1000-8152.2006.04.017 [29] 翁永鹏, 高宪文, 吕明阳. 一类非仿射非线性离散系统的改进无模型自适应控制[J]. 控制与决策, 2014, 29(12): 2226-2234. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201412020.htmWENG Yong-peng, GAO Xian-wen, LYU Ming-yang. Improved model-free adaptive control for a class of non-affine nonlinear discrete systems[J]. Control and Decision, 2014, 29(12): 2226-2234. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201412020.htm [30] 张晓光, 孙力, 赵克. 基于负载转矩滑模观测的永磁同步电机滑模控制[J]. 中国电机工程学报, 2012, 32(3): 111-116. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201203018.htmZHANG Xiao-guang, SUN Li, ZHAO Ke. Sliding mode control of PMSM based on novel load torque sliding mode observer[J]. Proceedings of the CSEE, 2012, 32(3): 111-116. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201203018.htm [31] EBRAHIMI N, OZGOLI S, RAMEZANI A. Model-free sliding mode control, theory and application[J]. Journal of Systems and Control Engineering, 2018, 232(10): 1292-1301. -

 下载:
下载:

 点击查看大图
点击查看大图
图(4)
计量
- 文章访问数: 1160
- HTML全文浏览量: 257
- PDF下载量: 578
- 被引次数: 0
