

Dynamics performance and parameter optimization of motor car with body suspension motor variable gauge bogies
-
摘要: 建立了一种适用于1 435/1 000 mm轨距变换、电机体悬的高速动车组变轨距转向架动车的动力学模型;重点计算在2种轨距线路上动车采用不同的轮轨匹配关系、不同磨耗状态下的运行稳定性分岔特性,并计算了轨距、轮轨游间对运行稳定性的影响;计算了车辆运行垂向和横向平稳性以及在不同曲线工况条件下车辆的曲线通过性能,结合相关动力学标准对各项动力学性能指标进行了评定,并对造成各项动力学指标差异的原因进行了简要分析;以电机体悬式变轨距转向架动车的12个悬挂参数为因子,以车辆蛇行失稳速度、轮轴横向力、轮轨垂向力、轮重减载率和脱轨系数5个动力学指标为响应,采用最优拉丁超立方设计方法进行试验设计;建立径向基神经网络代理模型,采用NSGA-Ⅱ多目标遗传算法对动车主要的悬挂参数进行多目标优化。计算结果表明:在设计工况条件下,所设计的高速动车组变轨距转向架动车在2种轨距线路上运行稳定性、平稳性和曲线通过性能均能满足设计要求;在1 000 mm轨距上运行的稳定性优于1 435 mm轨距情况,但运行平稳性和曲线通过性能劣于1 435 mm轨距情况;优化后的悬挂参数可以兼顾车辆的运行稳定性、平稳性和曲线通过性能,使车辆具有更好的动力学性能,在2种轨距线路运行上所有计算性能指标均满足相关标准。Abstract: A dynamics model of a variable gauge bogie motor car (MC) for body suspension motor high-speed electric multiple units (EMUs), which was suitable for 1 435/1 000 mm gauge changes, was established. The bifurcation characteristics of the running stability of the motor car under different wheel-rail matching relations and different wear conditions were calculated on two gauge lines, and the effects of the track gauge and clearance between the wheel flange and gauge line on running stability were calculated. The vertical and lateral stationarities of the vehicle operation and the curve-passing performance of the vehicle under different curve conditions were calculated. The dynamics performance indexes were evaluated in combination with relevant dynamics standards, and the reasons for the differences in the dynamics indexes were briefly analyzed. Twelve suspension parameters of the variable gauge bogie MC with a body suspension motor were taken as factors, five dynamic indexes, including vehicle hunting instability speed, wheel-axle lateral force, wheel-rail vertical force, wheel load reduction rate, and derailment coefficient, were taken as responses. Moreover, the optimal Latin hypercube design method was used for the experimental design. A radial basis function neural network agent model was established and the main suspension parameters of the vehicle were optimized using the NSGA-Ⅱ multi-objective genetic algorithm. Calculation results show that the running stability, stationarity, and curve passing performance of the designed high-speed EMU variable gauge bogie on two gauge lines meets the design requirements under the design conditions. The running stability on the 1 000 mm gauge is better than that of the 1 435 mm gauge, but the running stationarity and curve passing performance are inferior to those of the 1 435 mm gauge. As the optimized suspension parameters consider the running stability, stationarity, and curve passing performance of the vehicle, the vehicle exhibits a better dynamic performance. All the calculated performance indexes meet the relevant standards in the operation of the two gauge lines. 10 tabs, 13 figs, 31 refs.
-
Key words:
- variable gauge bogie /
- body suspension /
- stability /
- stationarity /
- curve passing /
- agent model /
- parameter optimization
-

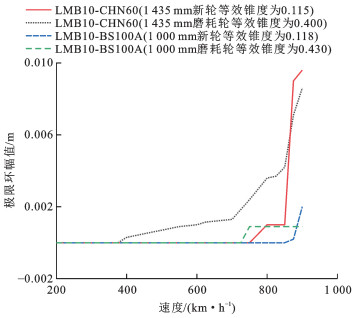
图 2 变轨距动车蛇行稳定性分岔特性
Figure 2. Bifurcation characteristics of serpentine stability of motor car with variable gauge

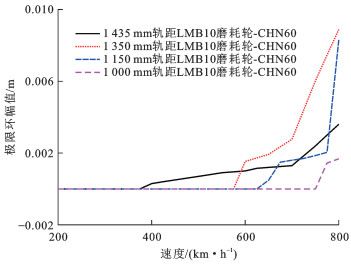
图 3 磨耗状态下变轨距动车蛇行稳定性分岔特性
Figure 3. Bifurcation characteristics of serpentine stability of motor car with variable gauge under wear condition

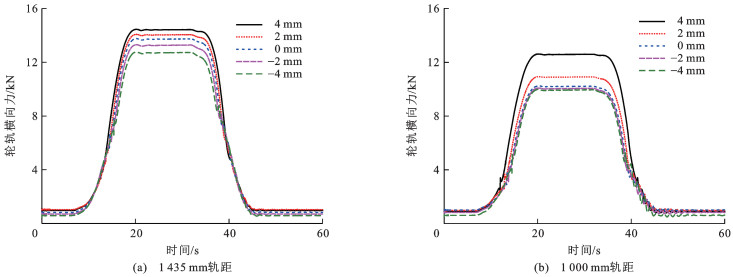
图 4 轮轨横向力随轮轨游间变化曲线
Figure 4. Variation curves of wheel-rail lateral force with clearance between wheel flange and gauge line

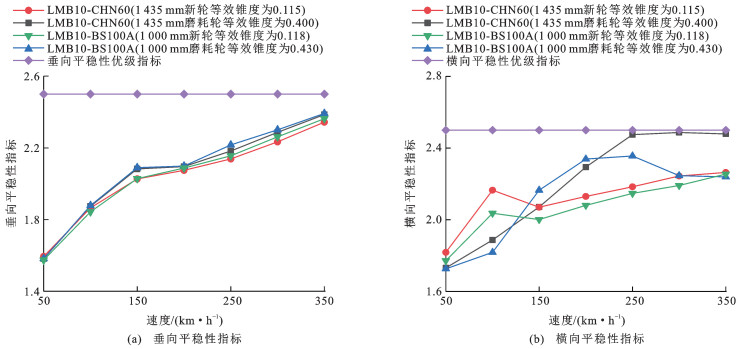
图 5 变轨距动车垂向和横向平稳性指标
Figure 5. Vertical and lateral stability indexes of motor car with variable gauge

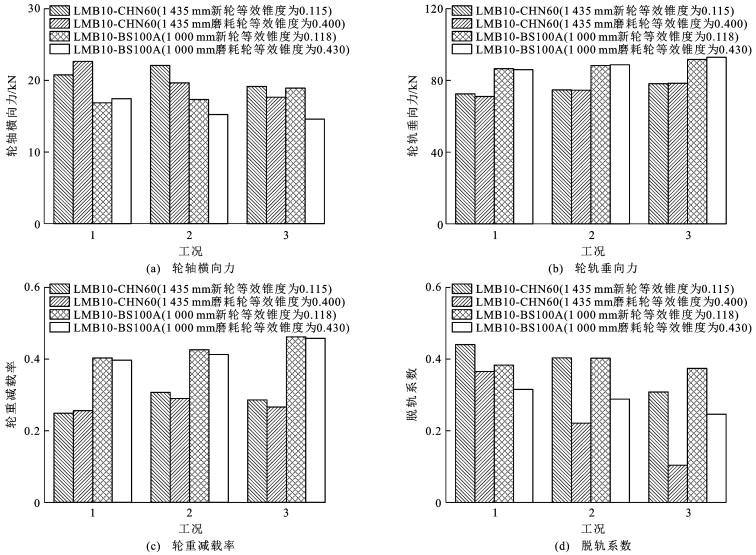
图 6 变轨距动车曲线通过性能指标
Figure 6. Curve passing performance indexes of motor car with variable gauge

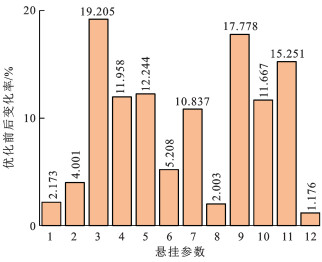
图 9 优化前后悬挂参数变化率
Figure 9. Change rates of suspension parameters before and after optimization

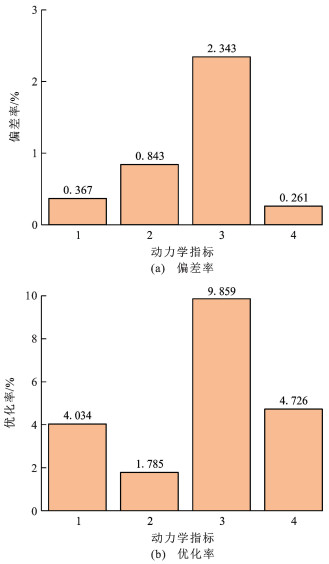
图 10 优化后动力学指标偏差率和优化率
Figure 10. Deviation rates and optimization rates of dynamics indexes after optimization

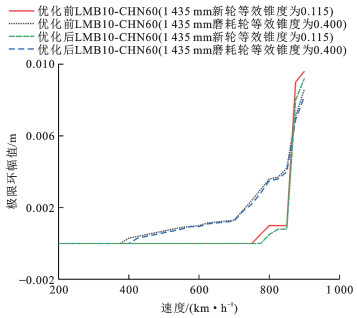
图 11 优化前后蛇行稳定性分岔对比
Figure 11. Comparison of serpentine stability bifurcation before and after optimization

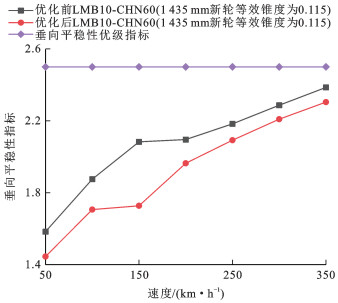
图 12 优化前后垂向平稳性指标对比
Figure 12. Comparison of vertical stationarity indexes before and after optimization

图 13 优化前后横向平稳性指标对比
Figure 13. Comparison of lateral stationarity indexes before and after optimization
表 1 动力学性能评价标准
Table 1. Evaluation standard of dynamics performance
动力学性能 主要评价内容 评价指标 稳定性 非线性临界速度 符合设计要求 平稳性 平稳性指标W W≤2.50优
2.50<W≤2.75良好
2.75<W<3.00合格曲线通过性 轮轴横向力H H≤10+P0/3(P0为静轴重),计算得限值为65.59 kN 轮轨横向力Q Q=30+10 500/R(R为曲线半径) 轮轨垂向力 170 kN 脱轨系数 0.8 轮重减载率 静态(运行速度不大于160 km·h-1) 限值0.65;动态(运行速度大于160 km·h-1)限值0.80  下载: 导出CSV
下载: 导出CSV
表 2 变轨距转向架动车主要动力学计算参数
Table 2. Main dynamics calculation parameters of motor car with variable gauge bogie
主要参数 数值 转向架中心距/mm 17 375 轴距/mm 2 500 轴重/t 17 轮径/mm 920 1 435 mm轨距车辆临界速度/(km·h-1) 350 1 000 mm轨距车辆临界速度/(km·h-1) 200 1 435 mm轨距轮对内侧距/mm 1 353 1 000 mm轨距轮对内侧距/mm 920 1 435 mm轨距车轮踏面滚动圆间距/mm 1 493 1 000 mm轨距车轮踏面滚动圆间距/mm 1 060
下载: 导出CSV
表 3 变轨距动车轮轨匹配关系
Table 3. Wheel-rail matching relationship of motor car with variable gauge
轨距/mm 轮轨匹配 新轮等效锥度 磨耗轮等效锥度 1 435 LMB10-CHN60 0.115 0.400 1 000 LMB10-BS100A 0.118 0.430
下载: 导出CSV
表 4 美国五级和六级谱参数
Table 4. Fifth and sixth order spectral parameters in United States
参数 五级谱取值 六级谱取值 Av/(cm2·rad·m-1) 0.209 5 0.033 9 Aa/(cm2·rad·m-1) 0.076 2 0.033 9 Ωs/(rad·m-1) 0.820 9 0.438 0 Ωc/(rad·m-1) 0.824 5 0.824 5
下载: 导出CSV
表 5 曲线工况设置
Table 5. Working condition settings of curve
轨距/mm 曲线半径/m 圆曲线长度/m 缓和曲线长度/m 外轨超高/mm 曲线欠超高/mm 曲线最高允许速度/(km·h-1) 曲线通过速度/(km·h-1) 1 435 800 300 400 120 75 114 100 1 600 300 350 100 75 154 130 2 400 300 300 80 75 177 150 1 000 800 300 400 85 60 130 100 1 600 300 350 70 60 174 130 2 400 300 300 55 60 200 150
下载: 导出CSV
表 6 曲线通过性能指标
Table 6. Curve passing performance indexes
工况 轨距/mm 轮轨匹配关系 等效锥度 轮轴横向力/kN 轮轨垂向力/kN 轮重减载率 脱轨系数 1 1 435 LMB10-CHN60 0.115 20.768 72.436 0.249 0.440 1 435 LMB10-CHN60 0.400 22.655 71.009 0.256 0.365 1 000 LMB10-BS100A 0.118 16.869 86.519 0.403 0.383 1 000 LMB10-BS100A 0.430 17.454 85.942 0.397 0.315 2 1 435 LMB10-CHN60 0.115 22.087 74.693 0.307 0.403 1 435 LMB10-CHN60 0.400 19.658 74.570 0.290 0.221 1 000 LMB10-BS100A 0.118 17.327 88.276 0.426 0.402 1 000 LMB10-BS100A 0.430 15.222 88.716 0.413 0.288 3 1 435 LMB10-CHN60 0.115 19.156 78.200 0.286 0.308 1 435 LMB10-CHN60 0.400 17.646 78.411 0.266 0.104 1 000 LMB10-BS100A 0.118 18.913 91.695 0.462 0.374 1 000 LMB10-BS100A 0.430 14.584 92.885 0.458 0.246
下载: 导出CSV
表 7 动力学模型主要性能参数
Table 7. Main performance parameters of dynamics model
悬挂参数 基准值 上限 下限 一系弹簧横向刚度/(kN·m-1) 920 736 1 104 一系弹簧垂向刚度/(kN·m-1) 750 600 900 一系垂向减振器阻尼/(kN·s·m-1) 150 120 180 轴箱转臂关节纵向刚度/(kN·m-1) 24 000 19 200 28 800 轴箱转臂关节横向刚度/(kN·m-1) 9 800 7 860 11 760 二系弹簧纵向刚度/(kN·m-1) 96.0 76.8 115.2 二系弹簧垂向刚度/(kN·m-1) 203.0 162.4 243.6 二系横向减振器阻尼/(kN·s·m-1) 5.0 4.0 6.0 二系垂向减振器阻尼/(kN·s·m-1) 9.0 7.2 10.8 抗蛇行减振器阻尼/(kN·s·m-1) 300 240 360 抗蛇行减振器刚度/(kN·m-1) 12 000 9 600 14 400 抗侧滚扭杆刚度/(kN·m·rad-1) 4 250 3 400 5 100
下载: 导出CSV
表 8 优化前后悬挂参数对比
Table 8. Comparison of suspension parameters before and after optimization
悬挂参数 悬挂参数名称 优化前 优化后 1 一系弹簧横向刚度/ (kN·m-1) 920 900 2 一系弹簧垂向刚度/ (kN·m-1) 750 720 3 一系垂向减振器阻尼/ (kN·s·m-1) 150 121 4 轴箱转臂关节纵向刚度/ (kN·m-1) 24 000 21 130 5 轴箱转臂关节横向刚度/ (kN·m-1) 9 800 8 600 6 二系弹簧纵向刚度/ (kN·m-1) 96 101 7 二系弹簧垂向刚度/ (kN·m-1) 203 181 8 二系横向减振器阻尼/ (kN·s·m-1) 5.0 5.1 9 二系垂向减振器阻尼/ (kN·s·m-1) 9.0 10.6 10 抗蛇行减振器阻尼/ (kN·s·m-1) 300 335 11 抗蛇行减振器刚度/ (kN·m-1) 12 000 10 170 12 抗侧滚扭杆刚度/ (kN·m·rad-1) 4 250 4 300
下载: 导出CSV
表 9 优化前后动力学指标对比
Table 9. Comparison of dynamics indexes before and after optimization
动力学指标 动力学指标名称 优化前仿真结果 优化后仿真结果 优化算法寻优结果 1 轮轴横向力/kN 17.327 16.628 16.689 2 轮轨垂向力/kN 88.276 86.700 85.969 3 轮重减载率 0.426 0.384 0.375 4 脱轨系数 0.402 0.383 0.382
下载: 导出CSV
表 10 曲线通过性能指标优化前后对比
Table 10. Comparison of curve passing performance indexes before and after optimization
轨距/mm 轮轨匹配关系 等效锥度 轮轴横向力/kN 轮轨垂向力/kN 轮重减载率 脱轨系数 优化前1 435 LMB10-CHN60 0.115 19.156 78.200 0.286 0.308 优化前1 000 LMB10-BS100A 0.118 18.913 91.695 0.462 0.374 优化后1 435 LMB10-CHN60 0.115 18.520 76.540 0.261 0.296 优化前1 000 LMB10-BS100A 0.118 18.740 89.689 0.439 0.368
下载: 导出CSV
-
[1] 徐彬, 黄志辉, 舒友, 等. 变轨距转向架研制与应用思考[J]. 机车电传动, 2018(3): 14-17. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201803002.htmXU Bin, HUANG Zhi-hui, SHU You, et al. Development and application strategy of gauge changeable bogies[J]. Electric Drive for Locomotives, 2018(3): 14-17. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201803002.htm [2] TOKUDA N, 周贤全. 可变轨距转向架的开发[J]. 国外铁道车辆, 2006, 43(1): 27-31. https://www.cnki.com.cn/Article/CJFDTOTAL-GWTD200601007.htmTOKUDA N, ZHOU Xian-quan. Development of gauge changeable bogies[J]. Foreign Rolling Stock, 2006, 43(1): 27-31. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GWTD200601007.htm [3] 李芾, 邵亚堂, 黄运华, 等. 国外变轨距列车及其转向架的发展与研究[J]. 机车电传动, 2018(3): 1-13. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201803001.htmLI Fu, SHAO Ya-tang, HUANG Yun-hua, et al. Development and research of foreign gauge changeable train and bogie[J]. Electric Drive for Locomotives, 2018(3): 1-13. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201803001.htm [4] 黄运华, 李芾, 傅茂海. 独立旋转车轮变轨距转向架[J]. 交通运输工程学报, 2003, 3(3): 59-63. http://jtysgcxb.xml-journal.net/article/id/200303006HUANG Yun-hua, LI Fu, FU Mao-hai. Gauge-changeable bogie with independently rotating wheel[J]. Journal of Traffic and Transportation Engineering, 2003, 3(3): 59-63. (in Chinese) http://jtysgcxb.xml-journal.net/article/id/200303006 [5] LIU Yin-hua. Research on gauge-changeable bogie for freight car and its performance[J]. Chengdu: Southwest Jiaotong University, 2006. (in Chinese) [6] 徐芳, 黄志辉, 王瑞卓, 等. 1 435/1 000 mm变轨距动车组转向架设计[J]. 机车电传动, 2019(4): 1-6. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201904001.htmXU Fang, HUANG Zhi-hui, WANG Rui-zhuo, et al. Design of 1 435/1 000 mm gauge changeable bogie for EMUs[J]. Electric Drive for Locomotives, 2019(4): 1-6. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201904001.htm [7] 崔红伟, 黄志辉, 周殿买, 等. 1 435/1 000 mm变轨距转向架轮对轴箱设计[J]. 机车电传动, 2018(5): 9-12. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201805003.htmCUI Hong-wei, HUANG Zhi-hui, ZHOU Dian-mai, et al. Design of wheelset axle box for 1 435/1 000 mm gauge- changeable bogie[J]. Electric Drive for Locomotives, 2018(5): 9-12. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201805003.htm [8] SHEVTSOV I Y, MARKINE V L, ESVELD C. Design of railway wheel profile taking into account rolling contact fatigue and wear[J]. Wear, 2008, 265(9/10): 1273-1282. [9] BAEK S G, SHIN B, LEE S W, et al. Optimization of high speed EMU suspension parameters for vibration reduction[J]. Journal of Mechanical Science and Technology, 2013, 27(2): 305-311. [10] CHOI H Y, LEE D H, LEE J, et al. Optimization of a railway wheel profile to minimize flange wear and surface fatigue[J]. Wear, 2013, 300(1/2): 225-233. [11] POLACH O. Wheel profile design for target conicity and wide tread wear spreading[J]. Wear, 2011, 271(1): 195-202. [12] 钱瑶, 王健, 王平, 等. 不同钢轨廓形下高速铁路轮轨型面匹配[J]. 西南交通大学学报, 2017, 52(2): 232-238. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT201702004.htmQIAN Yao, WANG Jian, WANG Ping, et al. Wheel-rail profile matching of high speed railway with different rail profiles[J]. Journal of Southwest Jiaotong University, 2017, 52(2): 232-238. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT201702004.htm [13] 姚远, 张红军, 罗赟, 等. CRH5型动车万向轴扭转振动分析[J]. 中国铁道科学, 2009, 30(2): 82-86. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200902017.htmYAO Yuan, ZHANG Hong-jun, LUO Yun, et al. Analysis on the torsional vibration of cardan shaft on CRH5 motor car[J]. China Railway Science, 2009, 30(2): 82-86. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200902017.htm [14] 李秋泽. CRH5型动车驱动系统万向轴失效机理及对策研究[D]. 北京: 北京交通大学, 2016.LI Qiu-ze. Study on failure mechanism and countermeasure of CRH5 drive system universal shaft[D]. Beijing: Beijing Jiaotong University, 2016. (in Chinese) [15] 罗世辉. 轨距对机车车辆稳定性影响的研究[J]. 中国铁道科学, 2010, 31(2): 56-60. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201002015.htmLUO Shi-hui. Study on the influence of the track gauge on vehicle yaw stability[J]. China Railway Science, 2010, 31(2): 56-60. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201002015.htm [16] DUSZA M. The wheel-rail contact friction influence on high speed vehicle model stability[J]. Transport Problems, 2015, 10(3): 73-86. [17] 张卫华, 李艳, 宋冬利. 高速列车运动稳定性设计方法研究[J]. 西南交通大学学报, 2013, 48(1): 1-9. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT201301002.htmZHANG Wei-hua, LI Yan, SONG Dong-li. Design methods for motion stability of high-speed trains[J]. Journal of Southwest Jiaotong University, 2013, 48(1): 1-9. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT201301002.htm [18] 孙建锋, 池茂儒, 吴兴文, 等. 抗蛇行减振器参数对车辆稳定性的影响分析[J]. 振动、测试与诊断, 2018, 38(6): 1155-1160, 1291. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCS201806012.htmSUN Jian-feng, CHI Mao-ru, WU Xing-wen, et al. Analysis of the influence of the yaw damper parameters on the vehicle stability[J]. Vibration, Measurement and Diagnosis, 2018, 38(6): 1155-1160, 1291. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCS201806012.htm [19] FRANCESCO B, STEFANO B, FERRUCCIO R. Active yaw damper for the improvement of railway vehicle stability and curving performances: simulations and experimental results[J]. Vehicle System Dynamics, 2006, 44(11): 857-869. [20] 池茂儒, 张卫华, 曾京, 等. 蛇行运动对铁道车辆平稳性的影响[J]. 振动工程学报, 2008, 21(6): 639-643. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDGC200806019.htmCHI Mao-ru, ZHANG Wei-hua, ZENG Jing, et al. Influence of hunting motion on ride quality of railway vehicle[J]. Journal of Vibration Engineering, 2008, 21(6): 639-643. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDGC200806019.htm [21] 潘春花. 地铁车辆悬挂系统的参数优化及失效分析[D]. 成都: 西南交通大学, 2012.PAN Chun-hua. The parameter optimization and failure analysis of the metro vehicle suspension system[D]. Chengdu: Southwest Jiaotong University, 2012. (in Chinese) [22] 于大方. 基于代理模型的城轨车辆悬挂参数优化[D]. 成都: 西南交通大学, 2018.YU Da-fang. The optimization of suspension parameters of urban rail vehicles based on surrogate model[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [23] 庄娇娇. 高速变轨距列车动力学性能优化及半主动控制策略研究[D]. 长春: 吉林大学, 2019.ZHUANG Jiao-jiao. Research on dynamic performance optimization and semi-active control strategy of high-speed variable-gauge train[D]. Changchun: Jilin University, 2019. (in Chinese) [24] 于曰伟, 周长城, 赵雷雷. 高速列车垂向随机振动及减振器阻尼参数优化[J]. 铁道学报, 2019, 41(9): 34-42. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201909008.htmYU Yue-wei, ZHOU Chang-cheng, ZHAO Lei-lei. Optimization of vertical random vibration and damping parameters of high-speed train[J]. Journal of the China Railway Society, 2019, 41(9): 34-42. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201909008.htm [25] YILDIZ A R, SOLANKI K N. Multi-objective optimization of vehicle crashworthiness using a new particle swarm based approach[J]. The International Journal of Advanced Manufacturing Technology, 2012, 59(1-4): 367-376. [26] EHRGOTT M, GANDIBLEUX X. Approximative solution methods for multiobjective combinatorial optimization[J]. Top, 2004, 12(1): 1-63. [27] BOONLONG K. Multiobjective optimization of a vehicle vibration model using the improved compressed-objective genetic algorithm with convergence detection[J]. Advances in Mechanical Engineering, 2013(6): 631-635. [28] 邹建军. 检测车轴箱定位形式及悬挂参数优化[D]. 成都: 西南交通大学, 2018.ZOU Jian-jun. Optimization of the axle box positioning form and suspension parameters for detection car[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [29] RUOCHEN L, FANGFANG W, MANMAN H, et al. An adjustable fuzzy classification algorithm using an improved multi-objective genetic strategy based on decomposition for imbalance dataset[J]. Knowledge and Information Systems, 2019, 61(3): 1583-1605. [30] 东方世平. 高速列车悬挂系统参数多目标优化[D]. 北京: 北京交通大学, 2015.DONGFANG Shi-ping. A multi-objective optimization method for the design of suspension parameters of a high-speed train[D]. Beijing: Beijing Jiaotong University, 2015. (in Chinese) [31] ZHANG You-wei, ZHAO Yan, ZHANG Ya-hui, et al. Riding comfort optimization of railway trains based on pseudo-excitation method and symplectic method[J]. Journal of Sound and Vibration, 2013, 332(21): 5255-5270. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 502
- HTML全文浏览量: 127
- PDF下载量: 41
- 被引次数: 0
