

High-precision real-time positioning method of train based on GPS/BDS combined solution
-
摘要: 为了构建智能化列车运行控制体系,针对卫星导航的铁路应用,开展了列车定位优化方法的研究;利用广播星历实时特性,借助框架转换模型为系统提供实时、准确、统一的时空参考;结合误差模型校正系统中与定位相关的误差,以降低定位解算复杂度;为了进一步优化系统定位性能,提高定位精度,提出一种基于GPS/BDS多星座联合解算的非差载波相位定位方法;利用京沈高铁实际数据进行仿真,对比了单星座定位方法和多星座定位方法的信号几何分布和定位误差;为了进一步验证提出定位方法的性能,利用同一组数据,将定位结果与传统伪距单点定位结果进行对比。试验结果表明:在测试期间,GPS和BDS单星座定位方法的可见卫星平均数分别为9.2和13.4颗,几何精度因子平均数分别为2.341 7和2.272 1;GPS/BDS多星座定位方法可见卫星平均数为22.5颗,几何精度因子平均数为1.264 6,因此,多星座定位方法能够成倍增加可见卫星数,优化卫星信号几何分布,在卫星信号连续变化条件下保证精确、连续定位;在卫星信号稳定区域内,伪距单点定位和提出的定位方法在空间三维方向上的定位均方根误差分别为5.396 1、5.569 7、2.831 2和0.976 1、0.988 8、0.861 8 m,在卫星信号受限区域内,伪距单点定位和提出的定位方法在3个方向上均方根误差分别为7.245 9、7.056 3、3.756 2和1.561 2、1.603 1、1.215 5 m,因此,相比于传统伪距单点定位,提出的定位方法能够在多个场景下获得更高的定位精度。Abstract: To establish the intelligent train control system, the rail application of global satellite navigation system (GNSS) was focused, and the researches on the positioning optimization method of train were pursued. Based on the real-time characteristics of broadcast ephemeris, the frame transformation model was used to provide real-time, accurate and unified spatio-temporal reference for the system. Combined with the error model, the errors related to positioning were corrected to reduce the complexity of positioning solution. In order to further optimize the positioning performance of the system and improve the positioning accuracy, a non-differential carrier-phase positioning method based on GPS/BDS multi-constellation combined solution was proposed. A simulation was carried out based on the actual data of Beijing-Shenyang High-Speed Railway, the signal geometric distributions and positioning errors of single constellation positioning method and multi-constellation positioning method were compared. To further verify the performance of the proposed positioning method, its positioning result was compared with that of the traditional pseudorange-based single point positioning (SPP) method based on the same group of data. Experimental results show that, during the test, the visible average satellite numbers of GPS and BDS single constellation positioning methods are 9.2 and 13.4, respectively, and the means of geometric dilution of precision (GDOP) are 2.341 7 and 2.272 1, respectively. The visible average satellite number of GPS/BDS multi-constellation positioning method is 22.5, and the mean of GDOP is 1.264 6. Hence, the multi-constellation positioning method can multiply the number of visible satellites and optimize the geometric distributions of satellite signals, which ensures the accurate and continuous positioning under the continuous variation of satellite signal. When the satellite signal is relatively stable, the root mean square errors (RMSEs) of the three-dimensional positioning are 5.396 1, 5.569 7, 2.831 2 and 0.976 1, 0.988 8, 0.861 8 m with respect to the SPP method and the proposed method, respectively. In signal limited area, the RMESs are 7.245 9, 7.056 3, 3.756 2 and 1.561 2, 1.603 1, 1.215 5 m, respectively. Therefore, compared with the traditional SPP method, the proposed method can achieve better positioning accuracy under different signal conditions. 5 tabs, 7 figs, 22 refs.
-

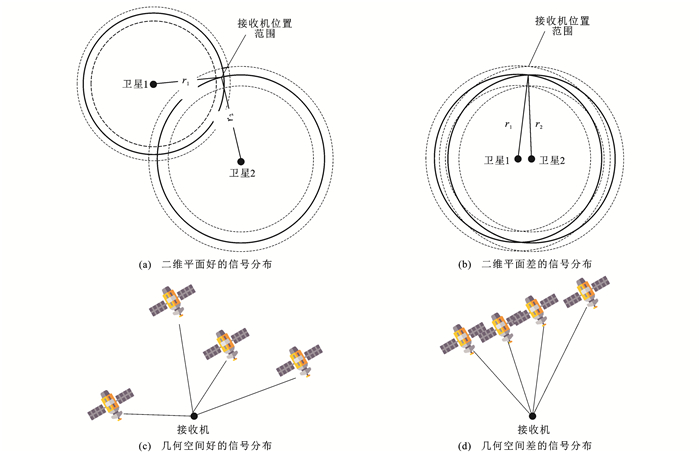
图 1 信号几何分布对位置精度的影响
Figure 1. Effect of signal geometric distributions on position accuracy
表 1 WGS-84与CGCS2000基本参数
Table 1. Fundamental parameters of WGS84 and CGCS2000
主要参数 WGS-84 CGCS2000 基准球体长半轴/m 6 378 137 6 378 137 基准椭球扁率 1/298.257 223 563 1/298.257 222 101 地球自转角速度/(rad·s-1) 7.292 115 146 7×10-5 7.292 115 0×10-5 引力与质量乘积/(m3·s-2) 3.986 005×1014 3.986 004 418×1014  下载: 导出CSV
下载: 导出CSV
表 2 测距误差源
Table 2. Range error sources
与卫星相关 与传播相关 与接收机相关 卫星钟差 电离层延时 接收机钟差 星历误差 对流层延时 相位中心偏差
下载: 导出CSV
表 3 GDOP、PDOP和HDOP平均值
Table 3. Means of GDOP, PDOP and HDOP
定位模式 GDOP PDOP HDOP GPS 2.341 7 2.039 1 1.267 4 BDS 2.272 1 1.908 0 1.700 1 GPS/BDS 1.264 6 1.108 1 0.884 6
下载: 导出CSV
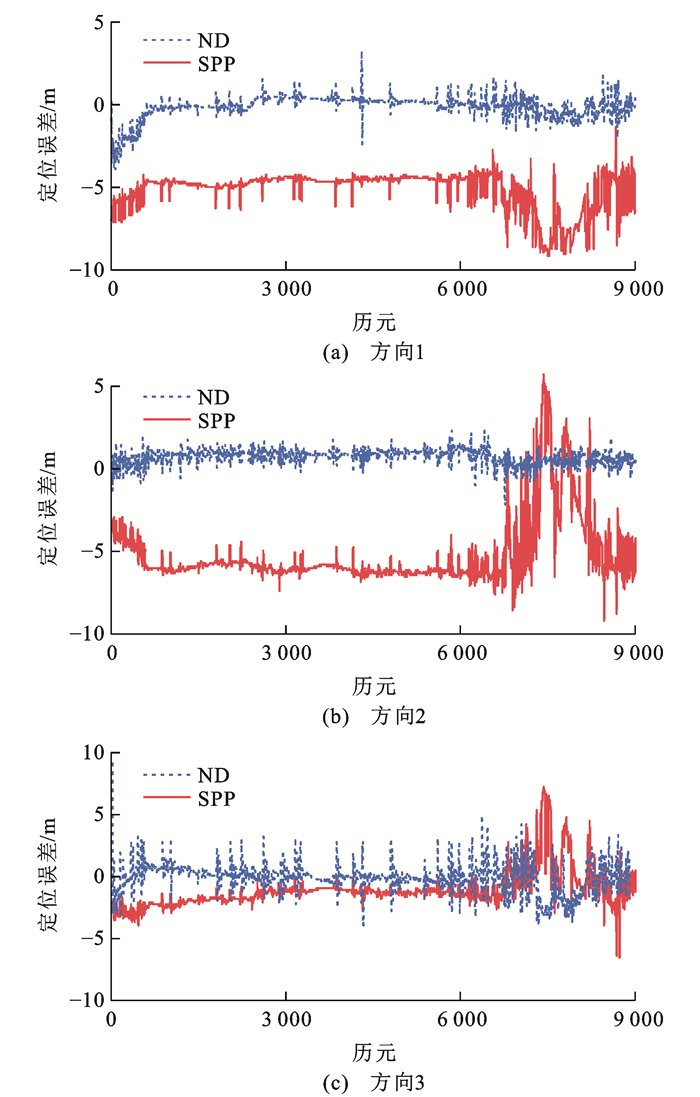
表 4 SPP和ND模型三维定位均方根误差
Table 4. Three-dimensional positioning RMSEs of SPP and ND
定位模型 方向1误差/m 方向2误差/m 方向3误差/m SPP 5.396 1 5.569 7 2.831 2 ND 0.976 1 0.988 8 0.861 8
下载: 导出CSV
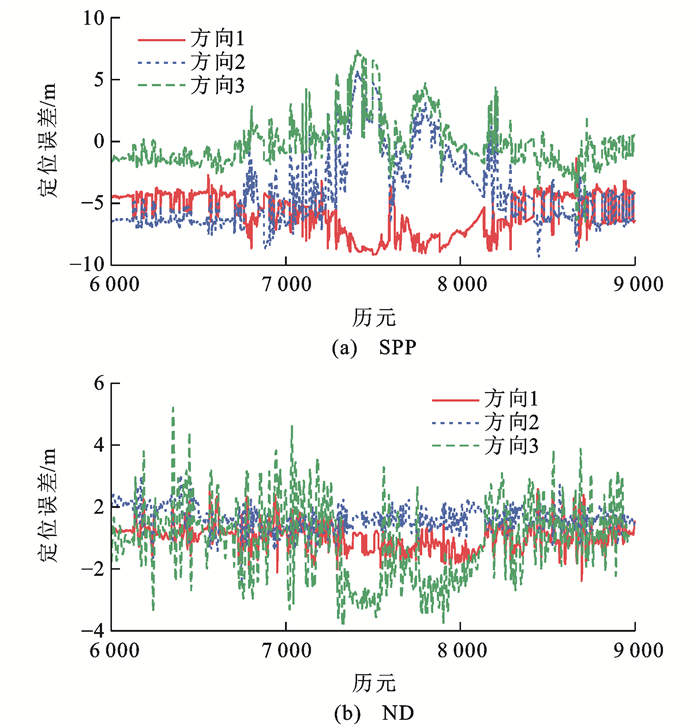
表 5 卫星信号受限区域三维定位均方根误差
Table 5. Three-dimensional positioning RMSEs in satellite signal limited area
定位模型 方向1误差/m 方向2误差/m 方向3误差/m SPP 7.245 9 7.056 3 3.756 2 ND 1.561 2 1.603 1 1.215 5
下载: 导出CSV
-
[1] 上官伟, 袁重阳, 蔡伯根, 等. 北斗二代在西部低密度铁路中的应用[J]. 交通运输工程学报, 2016, 16(5): 132-141. doi: 10.3969/j.issn.1671-1637.2016.05.015SHANG GUAN Wei, YUAN Chong-yang, CAI Bai-gen, et al. Application of BDS in western low-density railway lines[J]. Journal of Traffic and Transportation Engineering, 2016, 16(5): 132-141. (in Chinese) doi: 10.3969/j.issn.1671-1637.2016.05.015 [2] SPINSANTE S, STALLO C. Hybridized-GNSS approaches to train positioning: challenges and open issues on uncertainty[J]. Sensors, 2020, 20(7): 1885. doi: 10.3390/s20071885 [3] LI Qi, BAI Zheng-dong, CHEN Bo-bo, et al. High-speed railway track comprehensive measurement system based on GNSS/INS multi-sensor[C]//SUN Jia-dong, YANG Chang-feng, XIE Jun. China Satellite Navigation Conference 2020. Berlin: Springer, 2020: 3-14. [4] JIANG Wei, CHEN Si-rui, CAI Bai-gen, et al. A multi-sensor positioning method-based train localization system for low density line[J]. IEEE Transactions on Vehicular Technology, 2018, 67(11): 10425-10437. doi: 10.1109/TVT.2018.2869157 [5] OTEGUI J, BAHILLO A, LOPETEGI I, et al. Evaluation of experimental GNSS and 10-DOF MEMS IMU measurements for train positioning[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68(1): 269-279. doi: 10.1109/TIM.2018.2838799 [6] 上官伟, 谢朝曦, 姜维. 基于IMU标定补偿的列车组合定位优化方法[J]. 铁道学报, 2020, 42(2): 57-64. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB202002008.htmSHANG GUAN Wei, XIE Chao-xi, JIANG Wei. Optimization method for integrated train positioning accuracy based on IMU calibration compensation[J]. Journal of the China Railway Society, 2020, 42(2): 57-64. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB202002008.htm [7] HUANG Wei, DEFRAIGNE P, SIGNORILE G, et al. Improved multi-GNSS PPP software for upgrading the DEMETRA project time monitoring service[J]. Sensors, 2019, 19(20): 4389. doi: 10.3390/s19204389 [8] 李四辉, 蔡伯根, 闻映红, 等. 基于最大期望算法的列车完整性检测方法[J]. 铁道学报, 2017, 39(2): 74-81, 89. doi: 10.3969/j.issn.1001-8360.2017.02.011LI Si-hui, CAI Bai-gen, WEN Ying-hong, et al. Expectation maximization algorithm based train integrity detection method[J]. Journal of the China Railway Society, 2017, 39(2): 74-81, 89. (in Chinese) doi: 10.3969/j.issn.1001-8360.2017.02.011 [9] 王妍, 陈永刚. GPS信号失锁下的列车组合定位方法[J]. 导航定位学报, 2020, 8(4): 50-57. doi: 10.3969/j.issn.2095-4999.2020.04.009WANG Yan, CHEN Yong-gang. Train integration positioning method in GPS signal lost lock[J]. Journal of Navigation and Positioning, 2020, 8(4): 50-57. (in Chinese) doi: 10.3969/j.issn.2095-4999.2020.04.009 [10] 岳朝鹏, 崔俊锋. 中国高铁列控定位技术及对北斗卫星定位应用需求[J]. 铁路通信信号工程技术, 2019, 16(3): 1-4. https://www.cnki.com.cn/Article/CJFDTOTAL-TLTX201903001.htmYUE Chao-peng, CUI Jun-feng. Chinese high speed railway train positioning technology and application requirements for Beidou satellite positioning[J]. Railway Signalling and Communication Engineering, 2019, 16(3): 1-4. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TLTX201903001.htm [11] HEIRICH O. Bayesian train localization with particle filter, loosely coupled GNSS, IMU, and a track map[J]. Journal of Sensors, 2016, 2016: 2672640. [12] 杨德芳, 许伟, 万玉辉, 等. 机载高动态GPS单基站事后差分解算精度分析[J]. 测绘与空间地理信息, 2018, 41(12): 75-79, 83. doi: 10.3969/j.issn.1672-5867.2018.12.021YANG De-fang, XU Wei, WAN Yu-hui, et al. Post-differential calculating accuracy analysis of the high dynamic GPS single-reference station[J]. Geomatics and Spatial Information Technology, 2018, 41(12): 75-79, 83. (in Chinese) doi: 10.3969/j.issn.1672-5867.2018.12.021 [13] NERI A, CAPUA R, SALVATORI P, et al. Track constrained RTK-like positioning for railway applications[J]. Journal of the Institute of Navigation, 2018, 65(3): 335-352. doi: 10.1002/navi.260 [14] CAVALHERI E P, DOS SANTOS M C. Improved kinematic precise point positioning performance with the use of map constraints[J]. Journal of Applied Geodesy, 2020, 14(2): 191-204. doi: 10.1515/jag-2019-0034 [15] JANICKA J, TOMASZEWSKI D, RAPINSKI J, et al. The prediction of geocentric corrections during communication link outages in PPP[J]. Sensors, 2020, 20(3): 602. [16] 彭小强, 高井祥, 王坚. WGS84和CGCS2000坐标转换研究[J]. 大地测量与地球动力学, 2015, 35(2): 219-221. https://www.cnki.com.cn/Article/CJFDTOTAL-DKXB201502011.htmPENG Xiao-qiang, GAO Jing-xiang, WANG Jian. Research on coordinate transformation of WGS-84 and CGCS2000[J]. Journal of Geodesy and Geodynamics, 2015, 35(2): 219-221. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DKXB201502011.htm [17] 高成发, 赵庆, 高旺. 基于单个GPS/BDS信标台增强的实时精密单点定位[J]. 测绘工程, 2018, 27(5): 1-4, 9. https://www.cnki.com.cn/Article/CJFDTOTAL-CHGC201805001.htmGAO Cheng-fa, ZHAO Qing, GAO Wang. Real-time precise point positioning augmented with single GPS+BDS beacon reference station[J]. Engineering of Surveying and Mapping, 2018, 27(5): 1-4, 9. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CHGC201805001.htm [18] TU Rui, ZHANG Peng-fei, ZHANG Rui, et al. GNSS time offset monitoring based on the single difference among systems[J]. IET Radar, Sonar and Navigation. 2020, 14(2): 299-302. doi: 10.1049/iet-rsn.2019.0387 [19] 刘丽丽, 王跃科, 陈建云, 等. 导航星座自主时间基准的相对论效应[J]. 宇航学报, 2015, 36(4): 470-476. doi: 10.3873/j.issn.1000-1328.2015.04.014LIU Li-li, WANG Yue-ke, CHEN Jian-yun, et al. Effects of relativity in autonomous time reference for navigation constellation[J]. Journal of Astronautics, 2015, 36(4): 470-476. (in Chinese) doi: 10.3873/j.issn.1000-1328.2015.04.014 [20] GUO Jing, XU Xiao-long, ZHAO Qi-le, et al. Precise orbit determination for quad-constellation satellites at Wuhan University: strategy, result validation, and comparison[J]. Journal of Geodesy, 2016, 90(2): 143-159 [21] LIU Zhi-qiang, YUE Dong-jie, HUANG Zhang-yu, et al. Performance of real-time undifferenced precise positioning assisted by remote IGS multi-GNSS stations[J]. GPS Solutions, 2020, 24: 58. [22] LU De-biao, CAI Bai-gen. Case study of differential-GPS safety integrity performance on Qinghai-Tibet railway line[C]//RAK J, BERBINEAU M, MARAIS J, et al. 2017 15th International Conference on ITS Telecommunications. New York: IEEE, 2017: 17014756. -




 点击查看大图
点击查看大图
计量
- 文章访问数: 1553
- HTML全文浏览量: 572
- PDF下载量: 69
- 被引次数: 0
