

Dynamic adaptive intelligent navigation method for multi-object situation in open water
-
摘要: 考虑船舶操纵特性、《1972年国际海上避碰规则》和良好船艺要求,提出了动态自适应目标船不协调避碰行动的开阔水域智能航行方法;将物标分类、建模并构建数字孪生交通环境,结合航向控制方法、操纵运动和复航模型构建了自动航行模型,推演了船舶非线性操纵运动;基于自动航行模型量化解析了《规则》要求,探究动态避碰机理,建立了可行航向求取方法;在多目标环境中,提出了目标船机动判别方法,研究了《规则》约束下构成自主航行方案的改向时机、幅度和复航时机等要素求取方法。仿真结果表明:依靠信息秒级更新的滚动计算,提出的智能航行方法可自适应剩余误差和目标船随机运动;提出的智能航行方法能将可行航向区间和改向幅度精确到1°;将程序运行和复航时机计算步长设置为1、10 s,设置多类静态物标和6艘保向保速目标船,在640、1 053、2 561和3 489 s,本船进行右转9°、复航、保向保速和复航等操纵可让请所有目标并自主航行至终点;设置目标船在300 s采取不协调转向避让行动,本船在980、2 790、3 622、5 470 s时进行右转9°、左转12°、右转17°和复航等操纵可让请所有目标并自主航行至终点。可见,任意初始状态下的船舶均可沿计划航线自动航行至终点,提出的方法能满足多个、多类动静态物标共存的真实开阔水域环境中的智能航行需要。Abstract: An intelligent navigation method of dynamic adaptive target ship collision avoidance action in open water was proposed considering the ship maneuvering characteristics, the requirements of International Regulations for Preventing Collisions at Sea 1972 and good seamanship. The digital twin traffic environment was constructed by classifying and modeling objects. An automatic navigation model was developed by combination of course control method, ship maneuvering motion and sailing resuming model, and ship's nonlinear maneuvering motion was deduced. The requirements of International Regulations for Preventing Collisions at Sea 1972 were quantitatively analyzed based on the automatic navigation model, and the dynamic collision avoidance mechanism was studied. The method to calculate applicable course was established. In the multi-target environment, the maneuvering discrimination method of target ship was proposed. The method to obtain the factors such as the course changing time, amplitude and sailing resuming time which constitute the autonomous navigation scheme under the constraint of rules was studied. Simulation results show that the intelligent navigation method can adapt to the residual error and random motion of the target ships based on the rolling calculations of the information update at the second-level. The proposed intelligent navigation method can accurately achieve the feasible course range and course change amplitude of 1°. The calculation step lengths of program and sailing resumption time are set to 1 and 10 s, respectively, and multiple static objects and six target ships maintaining the course and speed are established in this simulation environment. Own ship remains clear from all targets and sails autonomously to the destination after a series of maneuverings of 9° to starboard, sailing resuming, keeping course and speed, sailing resuming at 640, 1 053, 2 561 and 3 489 s, respectively. Target ships are set to perform uncoordinated collision avoidance actions at 300 s, and own ship remains clear from all targets and sails autonomously to the destination after a series of maneuverings of 9° to starboard, 12° to port, 17° to starboard, and sailing resuming at 980, 2 790, 3 622 and 5 470 s, respectively. Therefore, a ship in any initial states can automatically sail along a planned route to its destination. The proposed method is suitable for intelligent navigation in actual open sea areas with multiple and multiple dynamic and static objects. 5 tabs, 13 figs, 30 refs.
-

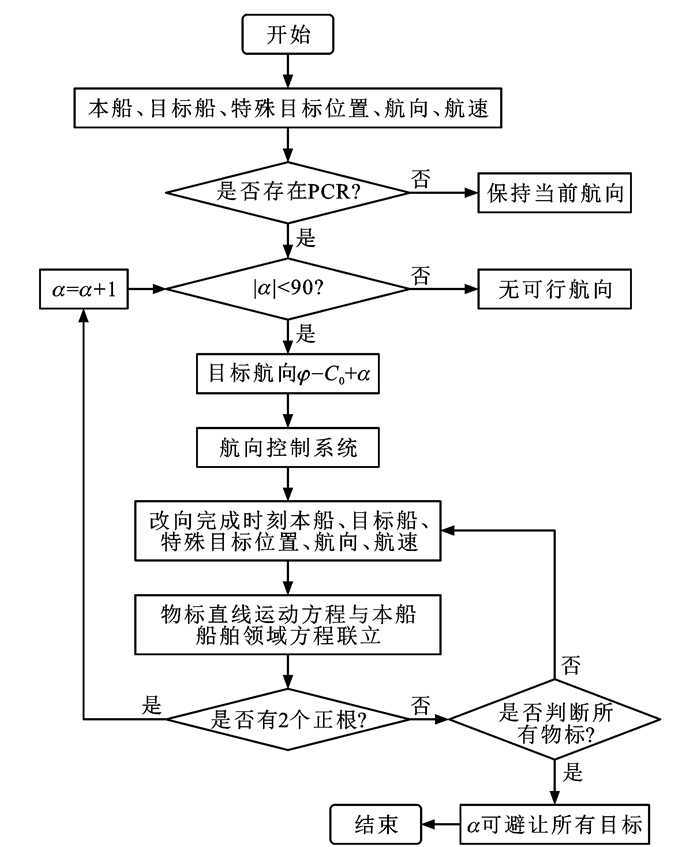
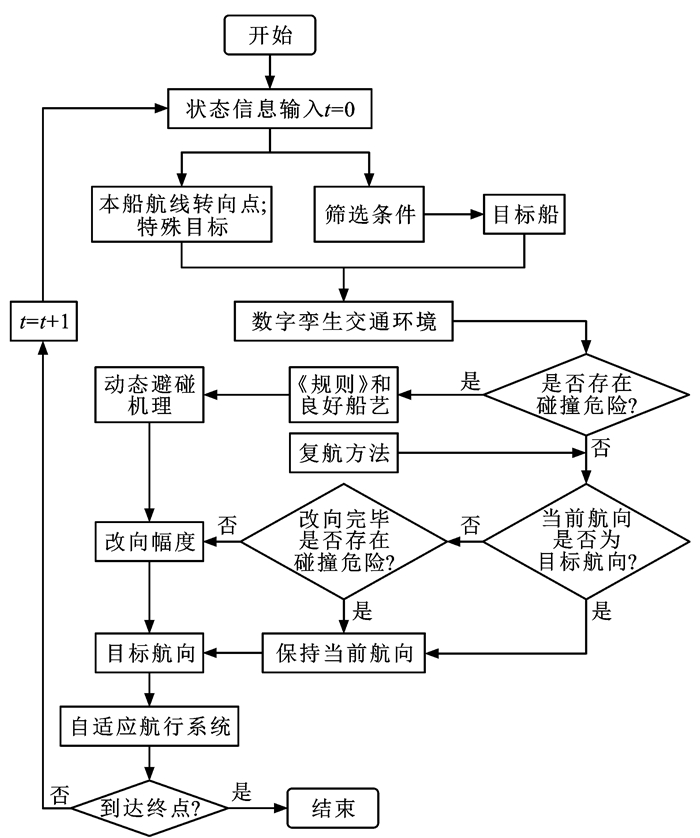
图 6 避碰转向角求解流程
Figure 6. Calculation process of course altering angle for collision avoidance

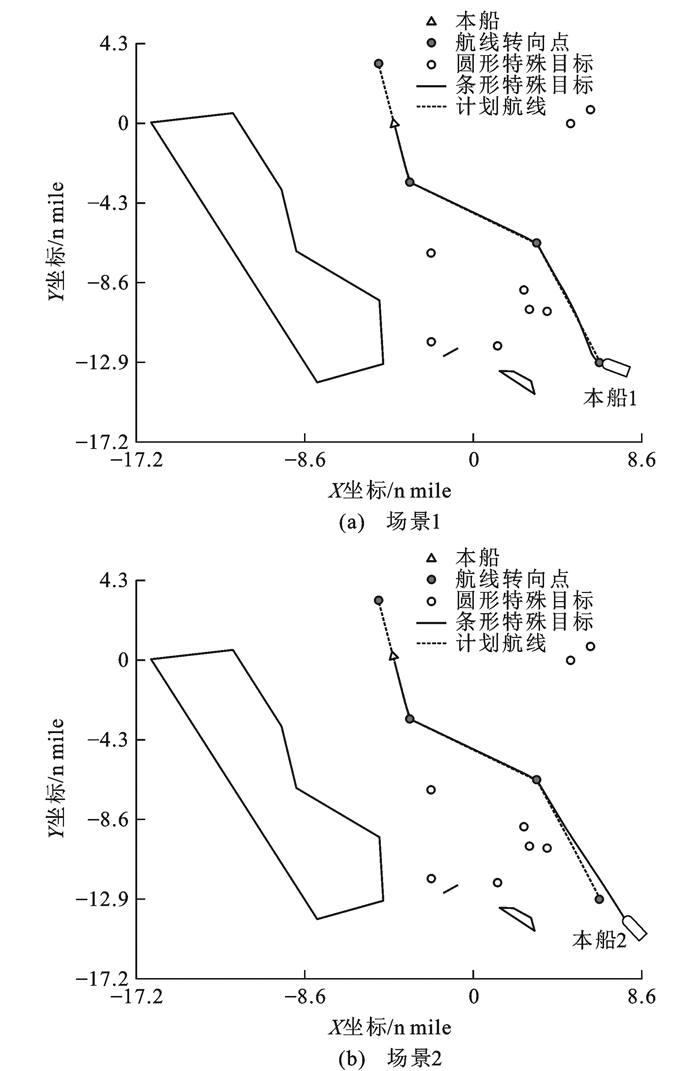
图 12 目标船保向保速下本船轨迹
Figure 12. Own ship tracks when target ships keep direction and speed

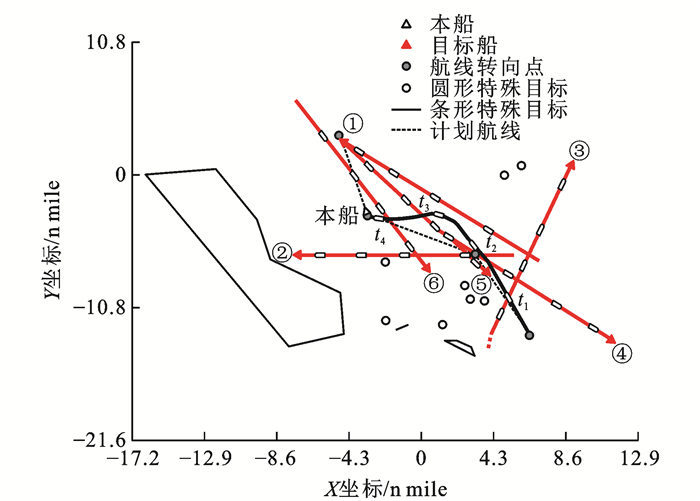
图 13 目标船变向变速下本船自主航行轨迹
Figure 13. Own ship tracks when target ship is under variable course and speed
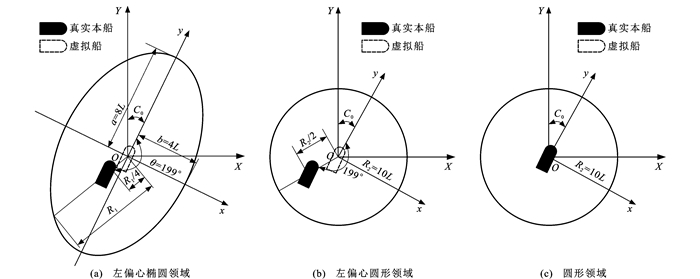
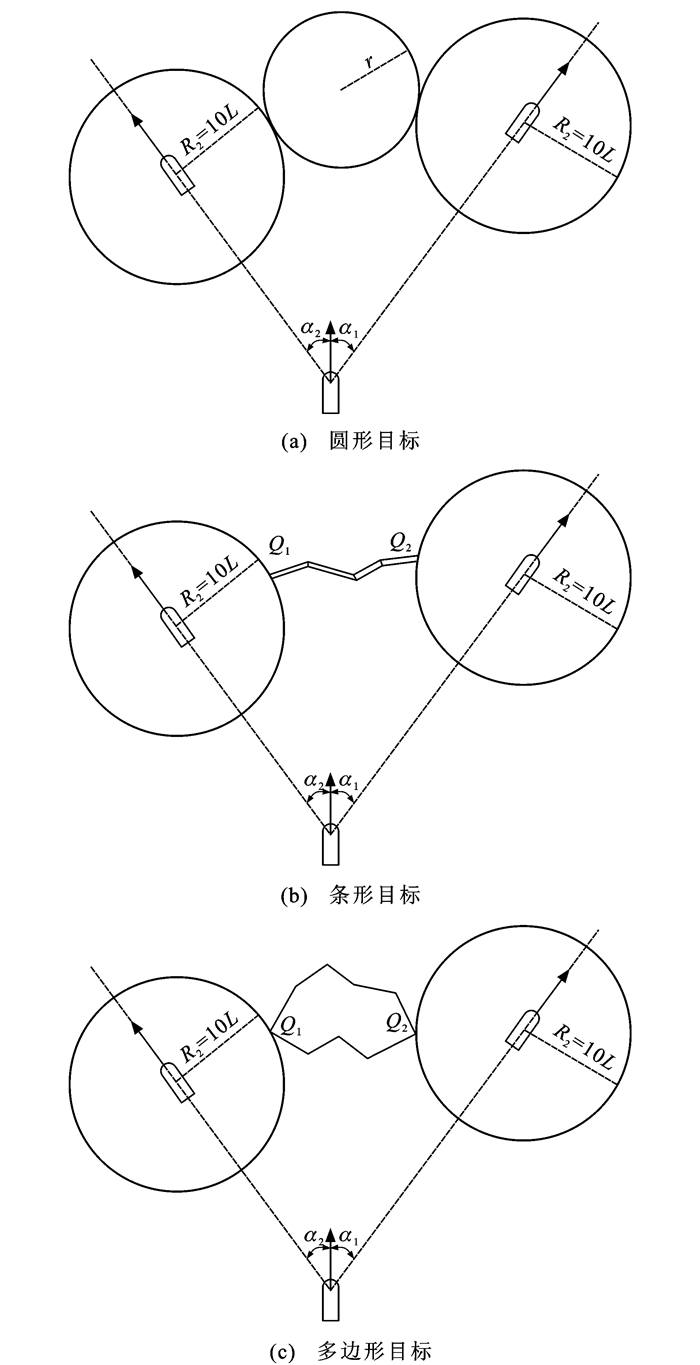
表 1 开阔水域物标分类
Table 1. Object classifications in open sea
目标 所属类别 运动状态 一般机动船 普通机动船 运动 钻井平台、岛屿 圆形目标 静止 浮标、明(暗)礁 点状目标 静止 浅滩、岸线 多边形目标 静止 拖带船队、拖网渔船 条形目标 运动 操限、失控船 圆形目标 运动 非机动船 点状目标 运动  下载: 导出CSV
下载: 导出CSV
表 2 圆形目标试验参数
Table 2. Experimental parameters of circular objects
编号 坐标/n mile 半径/m 1 (5.01,0.00) 500 2 (-2.16,-11.83) 250 3 (1.28,-12.10) 1 000 4 (-2.16,-7.00) 100 5 (2.60,-9.01) 100 6 (2.90,-10.10) 100 7 (3.81,-10.20) 100 8 (6.00,0.75) 100
下载: 导出CSV
表 3 其他目标试验参数
Table 3. Experimental parameters of other objects
物标 编号 坐标/n mile 条形目标 1 (-1.51,-12.61)
(-0.80,-12.20)多边形目标 1 (-4.61,-13.00)
(-4.82,-9.60)
(-9.10,-7.00)
(-9.80,-3.61)
(-12.30,0.51)
(-16.51,0.00)
(-8.02,-14.11)2 (1.40,-13.50)
(2.11,-13.50)
(3.02,-14.00)
(3.23,-14.71)转向点 1 (6.48,-12.96) 2 (3.24,-6.48) 3 (-3.24,-3.24) 4 (-4.86,3.24)
下载: 导出CSV
表 4 本船试验参数
Table 4. Experimental parameters of own ship
编号 航向/(°) 航速/kn 坐标/n mile 场景1 300 12 (6.48,-12.96) 场景2 330 12 (7.71,-14.01)
下载: 导出CSV
表 5 目标船初始参数
Table 5. Initial parameters of target ships
目标船 坐标/n mile 航速/kn 航向/(°) 船长/m ① (7.0,-7.0) 12 310 180 ② (5.5,-6.5) 10 270 180 ③ (4.0,-14.0) 12 10 180 ④ (0.0,-3.0) 12 150 180 ⑤ (-5.0,4.0) 12 170 180 ⑥ (-7.5,6.0) 12 150 180
下载: 导出CSV
-
[1] 李丽娜, 陈国权, 李国定, 等. 船舶拟人智能避碰决策方法研究综述[J]. 航海, 2014(2): 42-49. doi: 10.3969/j.issn.1009-8526.2014.02.013LI Li-na, CHEN Guo-quan, LI Guo-ding, et al. Overview of research on intelligent collision avoidance decision-making method for ships[J]. Navigation, 2014(2): 42-49. (in Chinese) doi: 10.3969/j.issn.1009-8526.2014.02.013 [2] 孙武. 中国船级社发布《智能船舶规范(2020)》[J]. 船舶工程, 2020, 42(3): 13-14. https://www.cnki.com.cn/Article/CJFDTOTAL-CANB202003007.htmSUN Wu. China Classification Society dispatching the rules of intelligent ship (2020)[J]. Ship Engineering, 2020, 42(3): 13-14. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CANB202003007.htm [3] BI Xiu-ying, LIU Xian-jie. Research on double collision avoidance mechanism of ships at sea[J]. The International Journal on Marine Navigation and Safety of Sea Transportation, 2015, 9(1): 13-16. doi: 10.12716/1001.09.01.01 [4] 熊勇, 贺益雄, 黄立文. 基于速度障碍的多船自动避碰控制方法[J]. 中国航海, 2015, 38(3): 46-51. doi: 10.3969/j.issn.1000-4653.2015.03.011XIONG Yong, HE Yi-xiong, HUANG Li-wen. Multi-ship collision avoiding control considering velocity obstacle[J]. Navigation of China, 2015, 38(3): 46-51. (in Chinese) doi: 10.3969/j.issn.1000-4653.2015.03.011 [5] WU Bo, XIONG Yong, WEN Yuan-qiao. Automatic collision avoidance algorithm for unmanned surface vessel based on velocity obstacles[J]. Journal of Dalian Maritime University, 2014, 40(2): 13-16. [6] HUANG Ya-min, VAN GELDER P H A J M, WEN Yuan-qiao. Velocity obstacle algorithms for collision prevention at sea[J]. Ocean Engineering, 2018, 151: 308-321. doi: 10.1016/j.oceaneng.2018.01.001 [7] LAZAROWSKA A. A new deterministic approach in a decision support system for ship's trajectory planning[J]. Expert Systems with Applications, 2016, 71: 469-478. [8] SANG Hong-qiang, YOU Yu-song, SUN Xiu-jun, et al. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations[J]. Ocean Engineering, 2021, 223: 108-123. [9] 韩君. 基于人工势场法的船舶自动导航算法设计[J]. 舰船科学技术, 2018, 40(6): 91-93. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201806032.htmHAN Jun. The design of ship automatic navigation algorithm based on artificial potential field[J]. Ship Science and Technology, 2018, 40(6): 91-93. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201806032.htm [10] LAZAROWSKA A. Ship's trajectory planning for collision avoidance at sea based on ant colony optimisation[J]. The Journal of Navigation, 2015, 68: 291-307. doi: 10.1017/S0373463314000708 [11] 张文拴. 基于改进势场蚁群算法的无人船路径规划研究[D]. 大连: 大连海事大学, 2020.ZHANG Wen-shuan. Research on unmanned surface vehicle path planning based on improved potential field ant colony algorithm[D]. Dalian: Dalian Maritime University, 2020. (in Chinese) [12] 江冠超, 肖英杰, 徐笑锋. 基于改进蚁群算法的船舶避碰路径规划决策支持[J]. 上海节能, 2020(12): 1463-1468. https://www.cnki.com.cn/Article/CJFDTOTAL-SHJL202012023.htmJIANG Guan-chao, XIAO Ying-jie, XU Xiao-feng. Decision support of ship collision avoidance path planning based on improved ant colony algorithm[J]. Shanghai Energy Conservation, 2020(12): 1463-1468. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SHJL202012023.htm [13] ZHANG Guang-yu, WANG Hong-bo, ZHAO Wei, et al. Application of improved multi-objective ant colony optimization algorithm in ship weather routing[J]. Journal of Ocean University of China, 2021, 20(1): 45-55. doi: 10.1007/s11802-021-4436-6 [14] PERERA L P, GUEDES SOARES C. Intelligent ocean navigation and fuzzy-Bayesian decision/action formulation[J]. IEEE Journal of Oceanic Engineering, 2012, 37(2): 204-219. doi: 10.1109/JOE.2012.2184949 [15] TAM C K, BUCKNALL R. Cooperative path planning algorithm for marine surface vessels[J]. Ocean Engineering, 2013, 57: 25-33. doi: 10.1016/j.oceaneng.2012.09.003 [16] XUE Yan-zhuo, CLELLAND D, LEE B S, et al. Automatic simulation of ship navigation[J]. Ocean Engineering, 2011, 38(17): 2290-2305. [17] HU Hui, HE Jing, HE Xiong-fei, et al. Emergency material scheduling optimization model and algorithms: a review[J]. Journal of Traffic and Transportation Engineering (English Edition), 2019, 6(5): 441-454. doi: 10.1016/j.jtte.2019.07.001 [18] 贺益雄, 黄立文, 牟军敏, 等. 交叉相遇局面让路船自动避碰行动方案[J]. 哈尔滨工程大学学报, 2015, 36(8): 1024-1029. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201508004.htmHE Yi-xiong, HUANG Li-wen, MOU Jun-min, et al. A scheme for automatic collision avoidance of a give way vessel in the crossing situation[J]. Journal of Harbin Engineering University, 2015, 36(8): 1024-1029. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201508004.htm [19] 贺益雄, 张晓寒, 胡惟璇, 等. 基于航向控制系统的船舶动态避碰机理研究[J]. 西南交通大学学报, 2020, 55(5): 988-993. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT202005011.htmHE Yi-xiong, ZHANG Xiao-han, HU Wei-xuan, et al. The research of ship dynamic collision mechanism based on course control system[J]. Journal of Southwest Jiaotong University, 2020, 55(5): 988-993. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT202005011.htm [20] MOU Jun-min, LI Meng-xia, HU Wei-xuan, et al. Mechanism of dynamic automatic collision avoidance and the optimal route in multi-ship encounter situations[J]. Journal of Marine Science and Technology, 2020, 26(1): 141-158. [21] HE Yi-xiong, JIN Yi, HUANG Li-wen, et al. Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea[J]. Ocean Engineering, 2017, 140: 281-291. doi: 10.1016/j.oceaneng.2017.05.029 [22] 贺益雄. 规则量化解析下船舶自动避碰模型与仿真研究[D]. 武汉: 武汉理工大学, 2015.HE Yi-xiong. The research of models and simulations about ship autonomous collision avoidance constrained by quantified resolution of rules[D]. Wuhan: Wuhan University of Technology, 2015. (in Chinese) [23] 周丹. 一种新动态模糊船舶领域模型研究[D]. 大连: 大连海事大学, 2017.ZHOU Dan. Research on a novel dynamic and fuzzy ship domain[D]. Dalian: Dalian Maritime University, 2017. (in Chinese) [24] DAVIS P V, DOVE M J, STOCKEL C T. A computer simulation of marine traffic using domains and arenas[J]. Journal of Navigation, 1980, 33(2): 215-222. doi: 10.1017/S0373463300035220 [25] 齐乐, 郑中义, 李国平. 互见中基于AIS数据的船舶领域[J]. 大连海事大学学报, 2011, 37(1): 48-50. doi: 10.3969/j.issn.1671-7031.2011.01.011QI Le, ZHENG Zhong-yi, LI Guo-ping. AIS-data-based ship domain of ships in sight of one another[J]. Journal of Dalian Maritime University, 2011, 37(1): 48-50. (in Chinese) doi: 10.3969/j.issn.1671-7031.2011.01.011 [26] YU Xia, ZHENG Shu-tao, YU Yang, et al. Ship maneuvering performance prediction based on MMG model[J]. IOP Conference Series: Materials Science and Engineering, 2018, 452(4): 42-46. [27] 陈立家. 海上多目标船智能避碰辅助决策研究[D]. 武汉: 武汉理工大学, 2011.CHEN Li-jia. Study on multiple objective decision making in collision avoidance at sea[D]. Wuhan: Wuhan University of Technology, 2011. (in Chinese) [28] 王鸿健. 模糊自适应PID控制的船舶航向控制器设计[J]. 工业控制计算机, 2016, 29(3): 86-87. doi: 10.3969/j.issn.1001-182X.2016.03.039WANG Hong-jian. The design of ship course controller controlled by proportional integral derivative[J]. Industrial Control Computer, 2016, 29(3): 86-87. (in Chinese) doi: 10.3969/j.issn.1001-182X.2016.03.039 [29] 彭秀艳, 张文颖, 贾书丽. 基于BP算法的船舶航向模糊PID控制研究[J]. 控制工程, 2013, 20(4): 623-626. doi: 10.3969/j.issn.1671-7848.2013.04.009PENG Xiu-yan, ZHANG Wen-ying, JIA Shu-li. The study of fuzzy self-adjusted PID control for ship course based on back propagation method[J]. Control Engineering of China, 2013, 20(4): 623-626. (in Chinese) doi: 10.3969/j.issn.1671-7848.2013.04.009 [30] 仇成群, 刘成林, 沈法华, 等. 基于MATLAB和模糊PID的汽车巡航控制系统设计[J]. 农业工程学报, 2012, 28(6): 197-202. doi: 10.3969/j.issn.1002-6819.2012.06.032QIU Cheng-qun, LIU Cheng-lin, SHEN Fa-hua, et al. The design of automobile cruise control system based on MATLAB and fuzzy PID[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(6): 197-202. (in Chinese) doi: 10.3969/j.issn.1002-6819.2012.06.032 -




 点击查看大图
点击查看大图
计量
- 文章访问数: 924
- HTML全文浏览量: 277
- PDF下载量: 68
- 被引次数: 0
