

Collision avoidance virtual simulation of intelligent vehicle embedded with multiple control models
-
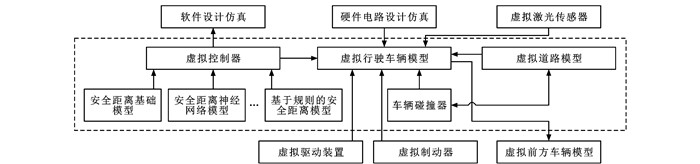
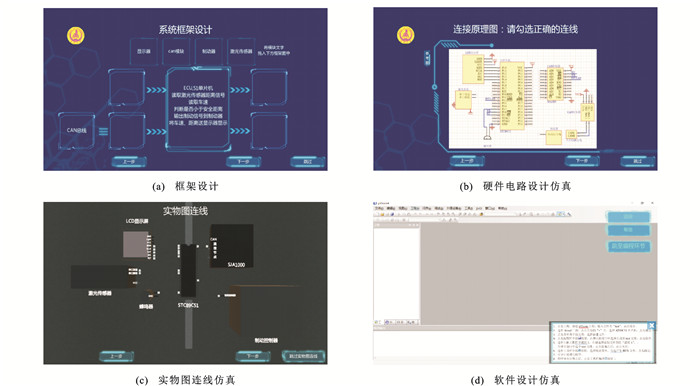
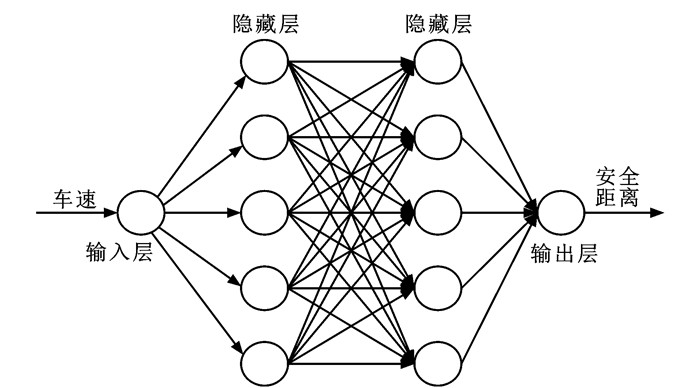
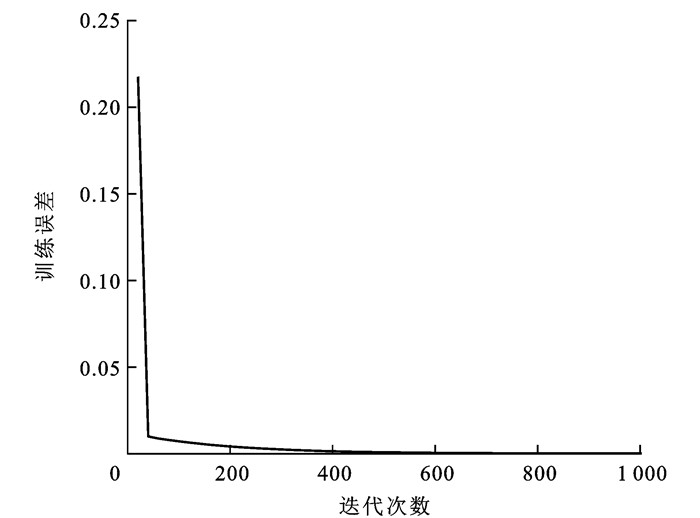
摘要: 针对智能汽车行驶安全距离监测与防撞试验高成本、高危险性以及试验结果难以观察的问题,研究了智能汽车安全距离监测与防撞的虚拟仿真;应用Visual Studio 2015、3Dmax、Unity3D等虚拟仿真技术在虚拟制动控制系统中进行了可嵌入多控制模型的自动驾驶汽车行车安全距离监测和防撞虚拟仿真试验,测试了不同制动模型的防撞应用效果;以电动汽车动力性能和制动力学特征为基础建立了虚拟整车模型及其制动系统模型,根据路面附着系数和不同道路材质建立了虚拟试验道路模型和试验场景等虚拟环境,开发了试验电子设备仿真模型,实现了多虚拟控制器嵌入,研究了基础模型和反向传播(BP)神经网络模型的嵌入与仿真效果;通过设计接口将虚拟软硬件设计效果与仿真试验过程相关联,并采用动画渲染直观展现,同时应用内存优化实现了在网络版访问服务器中进行虚拟仿真试验;通过实车试验验证了仿真系统,并对比了实车试验数据与2种模型的仿真数据。研究结果表明:在低速情况下,基础模型计算的安全距离与实车试验所测安全距离的相对误差为2.49%,BP神经网络模型预测的安全距离与实车试验所测安全距离的相对误差为2.07%;在高速情况下,因为传感器不稳定的原因,基础模型计算的安全距离与实车试验所测安全距离的相对误差为10.03%,BP神经网络模型预测的安全距离与实车试验所测安全距离的相对误差为10.35%。由此可见,该仿真系统可使高风险的碰撞试验在虚拟环境下完成。Abstract: In view of the high cost and risk involved in the driving safety distance monitoring and collision avoidance tests of intelligent vehicles and the difficulty in visualizing the test results, virtual simulations were conducted for the safety distance monitoring and collision avoidance of an intelligent vehicle. The virtual simulation technology based on the Visual Studio 2015, 3Dmax, and Unity3D was used to conduct the driving safety distance monitoring and collision avoidance virtual simulation tests on an autonomous car equipped with multiple control models in the virtual braking control system. The collision avoidance effects of different braking models were tested. Models for a virtual full vehicle and its braking system were established based on the dynamic performance and braking dynamics characteristics of electric vehicles. A virtual environment including a virtual test road model and a test scene was established based on the pavement adhesion coefficient and different road materials. Simulation models were developed for the test electronic devices to realize the multiple virtual controllers embedding. The embedding and simulation effects of the basic model and a back propagation (BP) neural network were studied. The design effects of the virtual software and hardware were correlated with the simulation test process through the design interface, and the animation rendering was used to directly display visually. Meanwhile, the memory optimization was applied to enable the virtual simulation test to be conducted in the server through the web access. Actual vehicle tests were conducted to verify the simulation system, and the actual vehicle test data were compared with the simulation results using the two models. Research results indicate that, at a low velocity, the relative error between the safety distance calculated by the basic model and that measured by the actual vehicle test is 2.49%, while the relative error between the safety distance calculated by the BP neural network and that measured by the actual vehicle test is 2.07%. At a high velocity, because of the sensor instability, the relative error between the safety distance calculated by the basic model and that measured in the actual vehicle test is 10.03%, while the relative error between the safety distance calculated by the BP neural network and that measured in the actual vehicle test is 10.35%. Therefore, the simulation system can enable a high-risk collision test to be conducted in a virtual environment. 6 tabs, 16 figs, 32 refs.
-

图 4 制动力与制动踏板力的关系曲线
Figure 4. Curves of relationship between brake force and brake pedal force

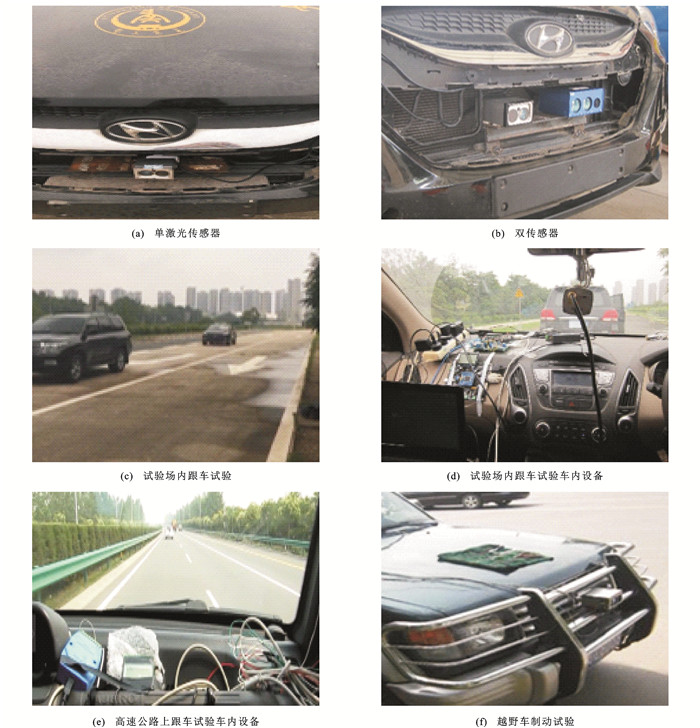
图 10 部分场景、用车和传感器安装
Figure 10. Some experimental scenarios, vehicles and installation of sensors

图 11 虚拟仿真试验设备安装
Figure 11. Installation of experimental equipment during virtual simulation

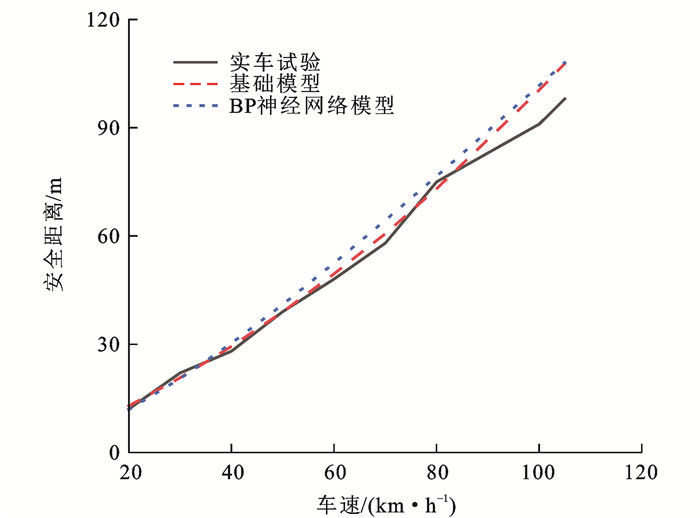
图 15 不同车速下实车与虚拟仿真模型的安全距离
Figure 15. Safety distances of real vehicle and virtual simulation model at different vehicle speeds

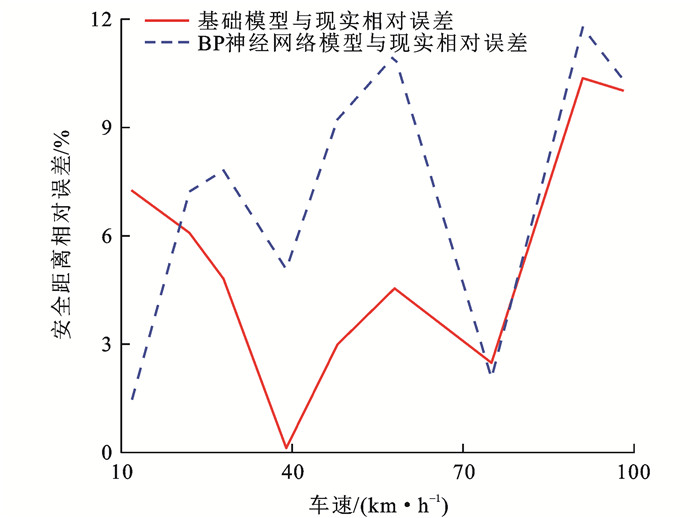
图 16 两种虚拟仿真模型的安全距离与现实的相对误差
Figure 16. Relative errors of safety distances between two virtual simulation models and reality
表 1 车轮碰撞器属性
Table 1. Wheel collider properties
属性名 含义 Mass 车轮质量 Radius 车轮半径 Wheel Damping Rate 车轮旋转阻尼 Suspension Distance 悬挂高度,可提高车辆稳定性,不小于0且方向垂直向下 Force App Point Distance 悬挂力作用点 Center 基于模型坐标系的车轮碰撞器中心点 Spring (Suspension Spring) 达到目标中心的弹力,越大到达中心越快(悬挂弹簧参数) Damper (Suspension Spring) 悬浮速度阻尼,越大车轮归位耗时越长 Target Position (Suspension Spring) 悬挂中心 Extremum Slip (Forward Friction) 前向摩擦曲线滑动极值(车轮前向摩擦力) Extremum Point (Forward Friction) 前向摩擦曲线极值点 Asymptote Slip (Forward Friction) 前向渐近线滑动值 Asymptote Point (Forward Friction) 前向曲线渐近线点 Stiffness (Forward Friction) 刚度,控制前向摩擦曲线倍数 Extremum Slip (Sideways Friction) 侧向摩擦曲线滑动极值(车轮侧向摩擦力) Extremum Point (Sideways Friction) 侧向摩擦曲线极值点 Asymptote Slip (Sideways Friction) 侧向渐近线滑动值 Asymptote Point (Sideways Friction) 侧向曲线渐近线点 Stiffness (Sideways Friction) 刚度,控制侧向摩擦曲线倍数  下载: 导出CSV
下载: 导出CSV
表 2 不同路面材质的附着系数
Table 2. Adhesion coefficients of different pavement materials
路面类型 状态 附着系数 高压轮胎 低压轮胎 越野轮胎 沥青或混凝土路面 干燥 0.50~0.70 0.70~0.80 0.70~0.80 潮湿 0.35~0.45 0.45~0.55 0.50~0.60 染污 0.25~0.45 0.25~0.40 0.25~0.45 卵石路面 干燥 0.45~0.50 0.50~0.55 0.60~0.70 碎石路面 干燥 0.50~0.60 0.60~0.70 0.60~0.70 潮湿 0.30~0.40 0.40~0.50 0.40~0.55 土路 干燥 0.40~0.50 0.50~0.60 0.50~0.60 湿润 0.20~0.40 0.30~0.45 0.35~0.50 泥泞 0.15~0.25 0.15~0.25 0.20~0.30 积雪荒土 松软 0.20~0.30 0.20~0.40 0.20~0.40 压实 0.15~0.20 0.20~0.25 0.30~0.50 结冰路面 零下气温 0.08~0.15 0.10~0.20 0.05~0.10
下载: 导出CSV
表 3 物理材质参数
Table 3. Physical material parameters
属性名 含义 属性名 含义 Dynamic Friction 滑动摩擦力 Static Friction 静摩擦力 Bounciness 表面弹性 Friction Combine 碰撞体摩擦力混合方式 Bounce Combine 表面弹性混合方式 Friction Direction 2 各向异向的方向 Dynamic Friction 2 作用于Friction Direction 2方向的滑动摩擦力 Static Friction 2 作用于Friction Direction 2方向的静摩擦力
下载: 导出CSV
表 4 直线车道上测得的试验数据
Table 4. Experimental data measured on straight lane
车速/ (km·h-1) 安全距离/ m 报警距离/ m 制动距离/ m 停车后距障碍物距离/m 20 12.87 12.29 7.49 4.80 20 12.87 11.00 6.60 4.40 30 20.66 21.26 12.86 8.40 30 20.66 27.00 22.40 4.60 40 31.56 24.60 17.85 6.75 40 31.56 29.00 21.55 7.45 50 38.95 40.10 30.70 9.40 50 38.95 38.00 27.90 10.10 60 49.44 52.07 40.17 11.90 60 49.44 48.00 39.60 8.40 60 49.44 49.00 40.15 8.85
下载: 导出CSV
表 5 高速公路跟车数据
Table 5. Vehicle following test data on highway
车速/ (km·h-1) 安全距离/ m 显示报警距离/m 前车大小 行驶场景 是否报警 60 49.44 15 小车 换道插入 报警 100 100.44 93 小车 平稳跟车 报警 100 100.44 92 小车 远离前车 不报警 105 107.78 98 小车 换道插入 报警 100 100.44 56 小车 接近前车 报警 100 100.44 20 小车 换道离开 报警 80 73.14 75 小车 换道离开 不报警
下载: 导出CSV
表 6 仿真数据和现实数据对比
Table 6. Comparison between simulation and reality datum
车速/(km·h-1) 现实安全距离/m 基础模型安全距离/m BP神经网络安全距离/m 基础模型与现实的相对误差/% BP神经网络模型与现实的相对误差/% 20 12 12.87 11.82 7.25 1.50 30 22 20.66 20.41 6.09 7.23 40 28 29.35 30.19 4.82 7.82 50 39 38.95 40.98 0.13 5.08 60 48 49.44 52.43 3.00 9.23 70 58 60.64 64.38 4.55 11.00 80 75 73.14 76.55 2.49 2.07 100 91 100.44 101.71 10.37 11.77 105 98 107.83 108.14 10.03 10.35
下载: 导出CSV
-
[1] LI Lin, CHEN Yu-feng, LI Zhong-jun, et al. Online virtual experiment teaching platform for database technology and application[C]//IEEE. Proceedings of 2018 13th International Conference on Computer Science and Education. New York: IEEE, 2018: 437-440. [2] ZHANG Xue-ran, JIANG Tong-jun, ZHANG Ze-kun, et al. Research on virtual simulation of whole process teaching of thermal power project[C]//IEEE. Proceedings of 2017 International Conference on Smart City and Systems Engineering (ICSCSE). New York: IEEE, 2017: 32-35. [3] 狄海廷, 董喜斌, 李耀翔, 等. 高校虚拟仿真实验教学资源的可持续发展机制研究[J]. 实验技术与管理, 2018, 35(5): 236-238, 242. https://www.cnki.com.cn/Article/CJFDTOTAL-SYJL201805061.htmDI Hai-ting, DONG Xi-bin, LI Yao-xiang, et al. Research on sustainable development mechanism for university virtual simulation experimental teaching resources[J]. Experimental Technology and Management, 2018, 35(5): 236-238, 242. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SYJL201805061.htm [4] URMSON C, ANHALT J, BAGNELL D, et al. Autonomous driving in urban environments: boss and the urban challenge[J]. Journal of Field Robotics, 2008, 25(8): 425-466. doi: 10.1002/rob.20255 [5] SAUST F, WILLE J M, LICHTE B, et al. Autonomous vehicle guidance on Braunschweig's inner ring road within the stadtpilot project[C]//IEEE. Proceedings of 2011 Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2011: 169-174. [6] ARDELT M, COESTER C, KAEMPCHEN N. Highly automated driving on freeways in real traffic using a probabilistic framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1576-1585. doi: 10.1109/TITS.2012.2196273 [7] HENDRIKS F, PELDERS R, TIDEMAN M. Future testing of active safety systems[J]. SAE International Journal of Passenger Cars—Electronic and Electrical Systems, 2010, 3(2): 170-175. doi: 10.4271/2010-01-2334 [8] ZOFKA M R, KLEMM S, KUHNT F, et al. Testing and validating high level components for automated driving: simulation framework for traffic scenarios[C]//IEEE. Proceedings of 2016 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2016: 144-150. [9] FAHRENKROG F, ZLOCKI A, ECKSTEIN L. Evaluation of active safety from test to safety impact assessment[J]. ATZ Worldwide, 2014, 116(1): 16-19. doi: 10.1007/s38311-014-0005-6 [10] 赵祥模, 承靖钧, 徐志刚, 等. 基于整车在环仿真的自动驾驶汽车室内快速测试平台[J]. 中国公路学报, 2019, 32(6): 124-136. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906014.htmZHAO Xiang-mo, CHENG Jing-jun, XU Zhi-gang, et al. An indoor rapid-testing platform for autonomous vehicle based on vehicle-in-the-loop simulation[J]. China Journal of Highway and Transport, 2019, 32(6): 124-136. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906014.htm [11] 陈涛, 魏朗. 人-车-路互动模式虚拟仿真系统[J]. 长安大学学报(自然科学版), 2007, 27(1): 67-71. doi: 10.3321/j.issn:1671-8879.2007.01.016CHEN Tao, WEI Lang. Driver-vehicle-road virtual simulation with interaction mode[J]. Journal of Chang'an University (Natural Science Edition), 2007, 27(1): 67-71. (in Chinese) doi: 10.3321/j.issn:1671-8879.2007.01.016 [12] 陈涛, 魏朗. 人-车-路视景仿真系统中信息的动态显示[J]. 计算机工程与应用, 2007, 43(7): 227-229. doi: 10.3321/j.issn:1002-8331.2007.07.068CHEN Tao, WEI Lang. Dynamic display of information in driver-vehicle-road simulation[J]. Computer Engineering and Applications, 2007, 43(7): 227-229. (in Chinese) doi: 10.3321/j.issn:1002-8331.2007.07.068 [13] 陈涛, 魏朗. 人-车-路虚拟仿真中驾驶数据采集系统开发[J]. 计算机应用研究, 2007, 24(7): 229-231. doi: 10.3969/j.issn.1001-3695.2007.07.075CHEN Tao, WEI Lang. Development of driving data acquisition system for virtual simulation of driver-vehicle-road[J]. Application Research of Computer, 2007, 24(7): 229-231. (in Chinese) doi: 10.3969/j.issn.1001-3695.2007.07.075 [14] 陈涛, 魏朗. 人-车-路虚拟仿真中人机交互模块开发[J]. 微计算机信息, 2006, 22(7): 283-285. https://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ200619103.htmCHEN Tao, WEI Lang. Study of the man-machine interaction for virtual simulation in driver-vehicle-road system[J]. Control and Measurement, 2006, 22(7): 283-285. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ200619103.htm [15] CHEN Yu, CHEN Shi-tao, ZHANG Tang-yi-ke, et al. Autonomous vehicle testing and validation platform: integrated simulation system with hardware in the loop[C]//IEEE. Proceedings of 2018 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2018: 949-956. [16] HAGER B, ALLEN J. Raw data injection and failure testing of camera, radar, and lidar for highly automated systems[J]. SAE Technical Paper Series, 2019-01-1378. [17] 严刚, 肖堃, 褚文博. 智能网联汽车计算平台虚拟化技术研究[J]. 汽车工程, 2020, 42(1): 33-37, 58.YAN Gang, XIAO Kun, CHU Wen-bo. Research on virtualization technology for computing platform of intelligent connected vehicles[J]. Automotive Engineering, 2020, 42(1): 33-37, 58. (in Chinese) [18] 胡朝辉, 黄顺霞, 杜展鹏, 等. 基于横向安全距离模型的主动避障算法[J]. 汽车工程, 2020, 42(5): 581-587. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202005004.htmHU Zhao-hui, HUANG Shun-xia, DU Zhan-peng, et al. Active obstacle avoidance algorithm based on lateral safety distance model[J]. Automotive Engineering, 2020, 42(5): 581-587. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202005004.htm [19] 张文会, 孙舒蕊, 苏永民. 双车道公路超车安全距离模型[J]. 交通运输系统工程与信息, 2019, 19(2): 182-188. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201902026.htmZHANG Wen-hui, SUN Shu-rui, SU Yong-min. Safe distance model for overtaking on two-lane highway[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(2): 182-188. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201902026.htm [20] 曲昭伟, 潘昭天, 陈永恒, 等. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201904009.htmQU Zhao-wei, PAN Zhao-tian, CHEN Yong-heng, et al. Car-following model with improving safety distance based on optimal velocity model[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(4): 1092-1099. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201904009.htm [21] 邓伟文, 李江坤, 任秉韬, 等. 面向自动驾驶的仿真场景自动生成方法综述[J/OL]. 中国公路学报, (2021-06-03)[2021-09-25]. http://kns.cnki.net/kcms/detail/61.1313.U.20210602.1437.004.html.DENG Wei-wen, LI Jiang-kun, REN Bing-tao, et al. A survey on automatic generation methods on simulation scenarios for autonomous driving[J/OL]. China Journal of Highway and Transport, (2021-06-03)[2021-09-25]. http://kns.cnki.net/kcms/detail/61.1313.U.20210602.1437.004.html. (in Chinese) [22] RIEDMAIER S, PONN T, LUDWIG D, et al. Survey on scenario-based safety assessment of automated vehicles[J]. IEEE Access, 2020, 8: 87456-87477. doi: 10.1109/ACCESS.2020.2993730 [23] 陈君毅, 冯天悦, 刘力豪, 等. 面向决策规划系统测试的具体场景自动化生成方法[J]. 汽车技术, 2020(10): 45-50. https://www.cnki.com.cn/Article/CJFDTOTAL-QCJS202010011.htmCHEN Jun-yi, FENG Tian-yue, LIU Li-hao, et al. An automatic generation method of concrete scenario for decision-making and planning system test[J]. Automobile Technology, 2020(10): 45-50. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCJS202010011.htm [24] 田彦涛, 王晓玉, 胡蕾蕾, 等. 电动汽车侧向换道行驶主动避撞控制算法[J]. 吉林大学学报(工学版), 2016, 46(5): 1587-1594. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201605030.htmTIAN Yan-tao, WANG Xiao-yu, HU Lei-lei, et al. Active collision avoidance control algorithm in electric vehicle lateral lane change[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1587-1594. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201605030.htm [25] 黄泽宇, 祝永新, 田犁, 等. 基于立体视觉的无人车测距系统设计[J]. 现代制造工程, 2019(9): 113-117. https://www.cnki.com.cn/Article/CJFDTOTAL-XXGY201909018.htmHUANG Ze-yu, ZHU Yong-xin, TIAN Li, et al. Designing unmanned vehicle ranging system for unmanned vehicles based on stereo vision technology[J]. Modern Manufacturing Engineering, 2019(9): 113-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XXGY201909018.htm [26] 来飞, 黄超群, 董红亮. 智能汽车自动紧急避撞系统的安全距离模型及其对比分析[J]. 重庆理工大学学报(自然科学), 2020, 34(9): 39-46. https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202009004.htmLAI Fei, HUANG Chao-qun, DONG Hong-liang. Safety distance model and comparative analysis for intelligent vehicle emergency collision avoidance system[J]. Journal of Chongqing University of Technology (Natural Science), 2020, 34(9): 39-46. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202009004.htm [27] 王同聚. 虚拟和增强现实(VR/AR)技术在教学中的应用与前景展望[J]. 数字教育, 2017, 3(1): 1-10. https://www.cnki.com.cn/Article/CJFDTOTAL-SEJY201701002.htmWANG Tong-ju. Application and prospect forecast of VR/AR technology in education[J]. Digital Education, 2017, 3(1): 1-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SEJY201701002.htm [28] 吕鹏. "元宇宙"技术: 促进人的自由全面发展[J]. 产业经济评论, 2022(1): 20-27. https://www.cnki.com.cn/Article/CJFDTOTAL-NJSS202003002.htmLYU Peng. "Meta universe" technology: promoting the free and all-round development of people[J]. Review of Industrial Economics, 2022(1): 20-27. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NJSS202003002.htm [29] 李一冰. 基于机器视觉的车前障碍物识别测距系统的设计[D]. 西安: 长安大学, 2018.LI Yi-bing. Design of vehicle obstacle recognition and distance measurement system based on machine vision[D]. Xi'an: Chang'an University, 2018. (in Chinese) [30] 武小林. 浅析汽车制动效能的影响因素[J]. 农机使用与维修, 2005(5): 48-49. https://www.cnki.com.cn/Article/CJFDTOTAL-NJWX200505041.htmWU Xiao-lin. Brief analysis on influencing factors of automotive braking efficiency[J]. Farm Mechinery Using and Maintenance, 2005(5): 48-49. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NJWX200505041.htm [31] 马亚亚, 李智超, 唐仁鹏, 等. 制动系统响应速度影响因素分析[J]. 汽车实用技术, 2021, 46(19): 115-117. https://www.cnki.com.cn/Article/CJFDTOTAL-SXQC202119033.htmMA Ya-ya, LI Zhi-chao, TANG Ren-peng, et al. Analysis of influencing factors of braking system response speed[J]. Automobile Practical Technology, 2021, 46(19): 115-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SXQC202119033.htm [32] 张译芳. 高等级公路行车安全距离及防追尾碰撞预警系统的研究[D]. 西安: 长安大学, 2016.ZHANG Yi-fang. Research on driving safety distance and read-end collision warning system of high-grade highways[D]. Xi'an: Chang'an University, 2016. (in Chinese) -









 点击查看大图
点击查看大图
计量
- 文章访问数: 1173
- HTML全文浏览量: 346
- PDF下载量: 99
- 被引次数: 0
