

Vehicle trajectory prediction based on spatio-temporal information fusion in crowded driving scenario
-
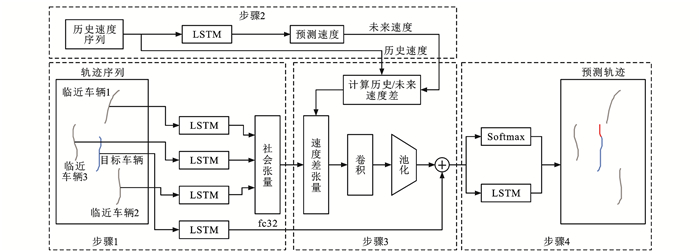
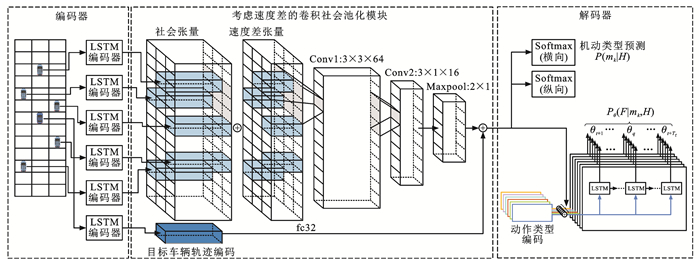
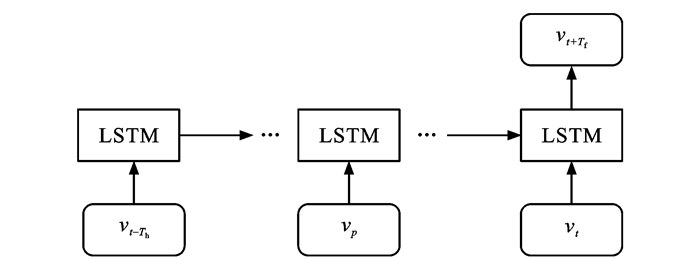
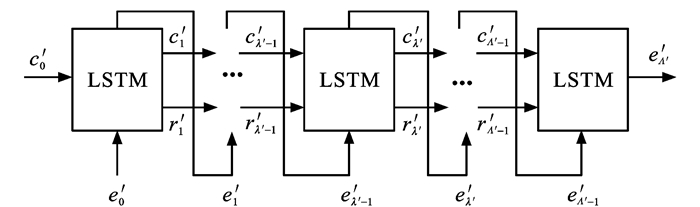
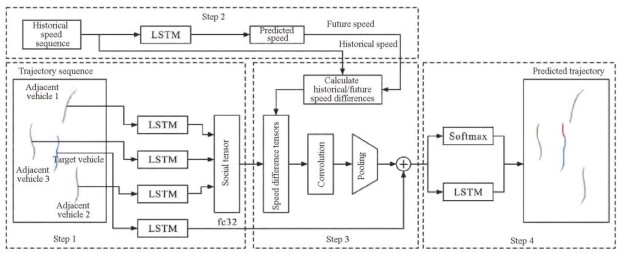
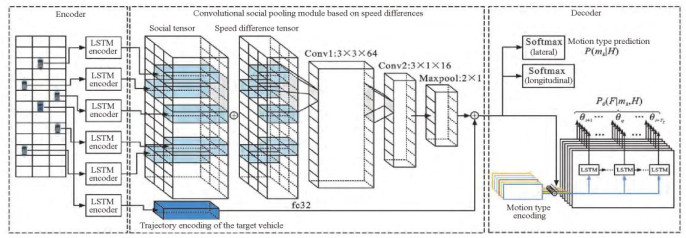
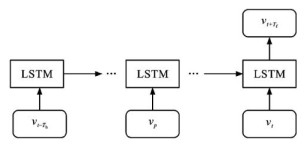
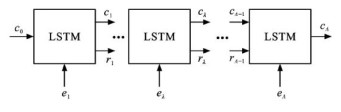
摘要: 将车辆间时空交互信息融入卷积社会池化网络中,提出了一种面向群体行驶场景的有人驾驶车辆轨迹预测模型;使用长短时记忆(LSTM)网络预测群体车辆速度,基于此预测值计算群体车辆间的速度差;构造LSTM编码器捕捉群体车辆行驶轨迹的时间序列特征,设计卷积社会池化网络提取群体车辆间的空间依赖关系,使用LSTM解码器预测未来车辆各种动作的出现概率和相应轨迹,将具有最高出现概率的动作及其轨迹作为最终轨迹预测结果;使用真实轨迹数据集对所构建模型进行了参数标定和性能验证,测试了不同轨迹编解码与速度预测方法对模型性能的影响,确定了最优模型结构。计算结果表明:相较于历史速度,使用预测速度计算速度差作为模型输入可将均方根误差(RMSE)降低19.45%;相较于门控循环神经网络,使用LSTM进行速度预测可将RMSE降低4.91%;相较于原始卷积社会池化网络,所提出模型的轨迹预测误差在RMSE与负似然对数2个指标上分别降低了20.32%和21.04%,明显优于其他卷积社会池化网络变体;所提出模型与原始卷积社会池化网络计算耗时差距约3 ms,能够满足实时应用要求。Abstract: The spatio-temporal interaction information among vehicles was integrated into the convolutional social pooling network to formulate a human-driving vehicle trajectory prediction model in the crowded driving scenario. The long short term memory (LSTM) network was used to predict the speeds of the crowded vehicles. The prediction result was used to calculate the speed differences among the vehicles. The LSTM encoder was built to capture the time-series features of the crowded vehicle trajectories. The convolutional social pooling network was designed to captured the spatial dependence of the crowded vehicles. The emerging probabilities of all possible movements of the vehicles and corresponding trajectories were predicted by the LSTM decoder. The movement with the highest emerging probability and its trajectory were taken as final prediction result of trajectory. The real vehicle trajectory dataset was used in the parameter calibration and performance verification of the proposed model. Different methods of trajectory encoding/decoding and speed predicting were tested to figure out their influences on the model performance. The test results were used to identify the optimal model structure. Calculation results show that compared with historical speed, predicted speed used to calculate speed difference as model input can decrease by 19.45% in terms of root mean square error (RMSE). Compared with the gate recurrent unit, the LSTM network as speed predictor can decrease by 4.91% in terms of RMSE. Compared with the original convolutional social pooling network, the trajectory prediction errors of the proposed model respectively decrease by 20.32% and 21.04% in terms of RMSE and negative log-likelihood. The model performance is also significantly better than other variants of the original convolutional social pooling network. The computation time difference of the proposed model and original convolutional social pooling network is about 3 ms, which meets the request of real-time application. 8 tabs, 9 figs, 23 refs.
-
0. 引言
盐湖区盐渍化软土地基具有含水率高、含盐量大、软弱土层深厚等特点,如不进行处理则会因盐胀、溶陷和腐蚀等原因,造成路面开裂、路基鼓胀沉降等工程病害[1-5]。各国对高速铁路沉降的要求都很严格,例如中国高铁建设要求时速300 km·h-1有砟轨道的路基工后沉降不超过50 mm,这给盐湖区高铁的修建造成一定困难,因此,需要研究适用于盐湖区并且能够满足高速铁路沉降要求的地基处理方案。
随着地基处理技术的不断发展,复合地基处理被广泛应用于土质较为软弱地区的工程建设中。付强等[6-7]通过数值模拟分析了京沪高铁CFG桩筏复合地基的加固效果,研究了路基填筑期和运营期的沉降情况,结果表明桩筏复合地基技术能够有效控制工后沉降;李波等[8]开展了典型桩筏结构地基处理的现场地基沉降试验,认为桩筏结构对于沉降要求严格的无砟轨道软土路基是优先选择的方案;陈建峰等[9]通过离心模型试验分析了套筒长度对加筋碎石桩复合地基路堤变形和稳定性的影响;蒋鹏程[10]采用室内模型试验,对比分析了螺杆桩和直杆桩复合地基的承载特性,并通过有限元数值模拟加以验证;黄俊杰等[11]针对3组不同桩间距的素混凝土桩复合地基支承路堤展开了离心模型试验和数值模拟,分析了其沉降变形特征与失稳破坏机制;黄龙等[12]采用离心模型试验分析了软土地基桩板结构路基的沉降特性,结果表明桩板结构路基沉降主要出现在路基堆载和预压土施工阶段,超载预压可有效降低工后沉降。
目前,已有诸多的地基处理方法应用于不同的盐渍土地基,如基于碎石排水桩的强夯法、换填覆重法、强夯置换法、浸水预溶强夯法等[13-17],强夯置换复合地基承载力和变形模量最大[18]。长短桩复合地基结合了刚性桩与散体材料柔性桩,在加固软土地基时,柔性桩提供排水通道,刚性桩承担荷载,是工程中常用的多桩型复合地基[19-20]。Liu等[21]结合离心模型试验和数值模拟,分析了长短桩复合地基沉降的影响因素;Guo等[22]分别进行单桩和多桩的加载试验,研究了长短桩复合地基的桩土作用机理;张恩祥等[23]通过现场原型试验分析了湿陷性黄土地区刚柔性桩复合地基的荷载传递机理;李善珍等[24-25]研究了黄土高原地区路堤荷载作用下长短桩复合地基的影响因素,分析了桩长、桩间距和下卧层刚度对复合地基的影响,提出长短桩应用于高速铁路地基时,选择最经济的长桩桩端应尽量支撑在持力层上;Yang等[26]基于双层地基的一维固结理论,给出了长短桩复合地基的整体平均固结度,认为复合地基固结率与长桩置换率有关。盐湖区地下水位高,盐湖区盐渍土同时具有盐渍土和软土的特点,对水泥等材料具有一定腐蚀,故采用长短桩复合地基处理盐渍化软弱土相比其他方法更有优势。
高速铁路对地基沉降有着严格要求,盐湖区盐渍土具有承载力低而压缩性高的力学特性,给高速铁路的修建带来一定困难,然而目前针对长短桩处理软弱盐渍土地基的相关研究较少,但设计参数的选取能够直接影响复合地基沉降控制效果,过于保守的设计则会造成材料的浪费,因此,研究设计参数对复合地基的影响可以直接给该工程及类似工程的设计提供建议与参考。
本文以伊朗德黑兰至伊斯法罕高速铁路项目为依托,根据苏尔坦盐湖区软弱盐渍土地基的特点配置模型地基土,开展多种工况的室内离心模型试验,并通过连续和连续-非连续数值模型研究了长短桩复合地基中桩长、桩间距、填土高度对地基沉降的影响。
1. 工程概况
伊朗德黑兰至伊斯法罕高速铁路是中国“一带一路”倡议重点关注项目之一,始于德黑兰,经过库姆,终于伊斯法罕,全长407 km,设计时速为300 km·h-1。其中德库段全长161 km除苏尔坦盐湖段为有砟轨道之外,大部分设计为无砟轨道;库伊段全长246 km,设计为有砟轨道。根据《高速铁路设计规范》(TB 10621—2014)规定,时速为300 km·h-1的有砟轨道,路基工后沉降一般不超过5 cm。
德库段途经苏尔坦盐湖区广泛分布着盐渍化深厚软弱土,路堤填方高度为3.5~5.0 m。盐湖地质如图 1所示,地质断面上层为盐渍化松软土,下层为盐渍化黏土。地质断面岩土物理力学指标如表 1所示,经易溶盐含量测定,测区内盐渍土的含盐类型主要为氯盐和亚氯盐,属于中盐渍土。为满足高铁对沉降控制的严格要求,需要对该段地基进行适当处理。
表 1 盐湖区地基土物理力学参数Table 1. Physical and mechanical parameters of foundation soils in salt lake region断面土层 天然密度/(g·cm-3 ) 黏聚力/kPa 内摩擦角/(°) 压缩模量/MPa 压缩系数 泊松比 盐渍化松软土 1.60 13 15 3 0.46 0.33 盐渍化黏土 1.70 28 23 8 0.19 0.33 2. 不同桩型复合地基的离心模型试验
长短桩地基因其在长桩之间设置了短桩而具有经济性,为研究不同的长桩、短桩所占比例下复合地基的沉降控制效果,根据盐湖段现场情况,开展全长桩、全短桩和长短桩复合地基的离心模型试验。
2.1 试验设备
试验用TLJ-3土工离心机主要性能指标为:有效旋转半径为2 m,模型箱容积为700 mm×360 mm ×500 mm,离心机加速度范围为10g~200g。试验布设的传感器有KTR11-25弹簧自复位式直线位移传感器(精度为0.01 mm)、自制沉降板、TY1005微型土压力传感器等,如图 2所示。
2.2 试验模型材料与制作
鉴于从施工地基现场取土困难且需要的土量相对较大,故依据现场地基土的物理力学性质进行室内地基土的配制。保证模型地基土含水率与原型地基土一致,并确保试验黏土材料与现场地基土强度相同,模型地基土物理力学参数如表 2所示。
表 2 模型地基土物理力学参数Table 2. Physical and mechanical parameters of model foundation soils断面土层 含水率/% 密度/(g·cm-3 ) 黏聚力/kPa 内摩擦角/(°) 盐渍化松软土 24.2 1.61 11.5 14.4 盐渍化黏土 8.6 1.78 20.1 23.6 试验过程中桩体所受应力状态远达不到破坏的标准,桩体变形很小,故采用6061号铝合金能近似模拟长桩对地基沉降的影响。短桩采用碎石桩,根据相似变换,并结合试验条件,最终确定采用过0.5~ 2.0 mm筛的砂制作模拟碎石桩,密实度由灌入砂的质量控制,采用过1 mm筛的砂模拟垫层。
2.3 试验方案设计
根据离心模型试验的相似理论,在综合考虑尺寸、误差、试验效果等因素下拟定相似比n=80,选取路基断面的一半模拟,离心模型试验各物理量相似比如表 3所示。按照时间相似比换算离心机所需要运行的时间,得出离心机共运行4 h模拟路堤填筑与工后运营2年期间的沉降变化,试验加速方案如表 4所示。
表 3 离心模型试验物理量的相似比Table 3. Similarity ratios of physical quantities in centrifugal model tests物理量 相似比 物理量 相似比 长度 1/n 弹性模量 1 重度 n 加速度 n 黏聚力 1 应力 1 内摩擦角 1 位移 1/n 表 4 离心模型试验加速方案Table 4. Acceleration scheme in centrifugal model tests试验阶段 填土高度/m 加速度/g 模型历时/min 原型历时/d 模型预压 10.0 5.0 1 填土过程 2 29.1 51.2 30 4 60.5 11.8 30 5 80.0 6.8 30 工后1年 5 80.0 82.2 365 工后2年 5 80.0 82.2 365 试验中模拟的施工现场路基高度为5 m,宽度为13.6 m,复合地基布桩形式如表 5所示,桩间距为1.35 m,并进行一组不做处理的对照试验,地基模型如图 3所示,截面尺寸如图 4所示。
表 5 地基处理方案Table 5. Foundation treatment schemes复合地基形式 长度/m 尺寸/m 桩间距/m 置换率 布桩形式 全长桩复合地基 22 0.45×0.45 1.35 0.088 
全短桩复合地基 11 0.50 1.35 0.088 
长短桩复合地基 长桩 22 0.45×0.45 1.35 0.044 
短桩 11 0.50 0.044 2.4 试验结果分析
不同复合地基和对照组累计沉降随时间变化曲线如图 5所示。随着填筑的进行,未处理地基的沉降以较大速率增长,采用全长桩复合地基、全短桩复合地基和长短桩复合地基处理后,沉降均得到不同程度的控制。试验结束时,未处理地基的累计沉降为251.36 mm,工后沉降为90.23 mm,超出高速铁路有砟轨道对沉降要求的设计标准(不大于50 mm);采用全长桩复合地基处理时,累计沉降为52.50 mm,其中,工后沉降为28.16 mm,可以满足设计要求;采用全短桩复合地基处理时,累计沉降为105.64 mm,工后沉降为53.95 mm,不符合设计标准;采用长短桩复合地基处理后,累计沉降为71.37 mm,工后沉降为36.17 mm,满足规范对沉降设计要求。
图 6为各组试验在加速历程下桩土应力比发展曲线。随着填筑进行,桩土应力比先增大,后减小,最后稳定;随着填土荷载不断增加,桩体承担了较大部分的荷载,桩土应力比增大,桩间土在上部荷载的影响下产生压缩而强度不断提高;随着时间的推移,桩体产生沉降的同时,部分荷载由桩向桩间土转移,桩土应力分布发生改变,桩土应力比随之减小并逐渐趋于稳定;最终,全长桩中桩土应力比稳定在8.0左右,全短桩中的应力比稳定在1.7左右, 长短桩复合地基中,长桩的桩土应力比稳定在5.0左右,短桩桩土应力比稳定在2.5左右。
3. 长短桩复合地基设计参数优化
离心模型试验结果说明采用长短桩处理后可以满足设计标准的沉降要求,为了进一步研究长短桩复合地基中桩长比、桩间距与短桩布置形式对沉降控制效果的影响,在FLAC3D中建立了路基模型,通过数值计算对长短桩复合地基进行优化分析。
3.1 数值计算模型的建立与验证
3.1.1 数值计算模型的建立
为简化计算,将碎石桩转化为边长0.45 m的方桩,复合地基采用正方形布桩,选取路堤一半进行模拟,模型如图 7所示,各部分计算参数如表 6所示。通过对土体渗流的流固耦合计算得到复合地基工后2年的沉降发展规律。
表 6 地基结构的数值计算参数Table 6. Numerical calculation parameters of foundation structures地基结构 天然密度/(g·cm-3 ) 黏聚力/kPa 内摩擦角/(°) 泊松比 压缩模量/MPa 弹性模/MPa 渗透系数/(m·s-1) 垫层 2.1 5 30 0.33 30 1.2×10-4 路堤填方 2.1 15 27 0.33 25 盐渍化松软土 1.6 13 15 0.33 3 2.7×10-7 盐渍化黏土 1.7 28 23 0.33 8 4.3×10-7 预制桩 2.1 0.20 3.5×104 碎石桩 2.0 0 38 0.25 70.0 1.7×10-3 考虑到桩土之间的界面作用,在桩土交界面建立接触面单元,如图 7所示。通过体积模量和剪切模量计算桩土接触面的等效刚度,考虑到桩土之间的相互作用,长桩桩土接触面的内摩擦角和黏聚力取桩周土的85%;短桩桩土接触面的等效刚度取等效刚度计算结果的60%,短桩桩土接触面的内摩擦角和黏聚力取桩周土的60%。接触面等效刚度为
K=(m+43)G/Z 式中:K为等效刚度;m为体积模量;G为剪切模量;Z为单元体法向最小宽度。
3.1.2 数值计算结果与离心模型试验结果对比
数值计算结果与离心模型试验数据的对比如图 8所示。离心模型试验中地基未处理和采用长短桩处理后累计沉降分别为251.36和71.37 mm,数值计算结果中二者分别为265.84和85.79 mm,相差分别为14.48和14.42 mm,认为数值模拟的结果能够较好地反映离心试验的结果。
 图 8 离心模型试验数据与数值计算结果对比Figure 8. Comparison of centrifugal model test data and numerical calculation results
图 8 离心模型试验数据与数值计算结果对比Figure 8. Comparison of centrifugal model test data and numerical calculation results3.2 影响因素分析
3.2.1 短桩桩长的影响
长桩桩长保持22 m不变,桩间距为3和4倍桩径D(即3D和4D),通过改变短桩桩长l与长桩桩长L的桩长比l/L,得出短桩桩长对复合地基承载特性影响。计算时,短桩桩长依次取8.8、11.0、13.2和15.4 m,即桩长比l/L分别为0.4、0.5、0.6和0.7。
图 9为不同桩长比时复合地基沉降沿横断面方向的分布曲线,整体来看,沉降曲线均近似呈盆状规律,距离路基中心越远,沉降越小。桩间距为3D时,不同桩长比均有较好的沉降控制效果:桩长比为0.4时,复合地基的最大沉降为41.69 mm,桩长比每增加0.1,沉降减少12.32%;桩长比从0.6增加到0.7时,沉降降幅为7.31%,因此,桩间距为3D时桩长比为0.6有较好的沉降控制效果。桩间距为4D时,桩长比从0.4增加到0.7的过程中,桩长比每增加0.1,沉降依次减小了7.86%、8.31%和8.66%,沉降降幅比较稳定,说明桩间距增大时,提高桩长比可以提高复合地基的沉降控制效果。
 图 9 短桩桩长对复合地基沉降的影响Figure 9. Influence of short pile length on settlements of composite foundations
图 9 短桩桩长对复合地基沉降的影响Figure 9. Influence of short pile length on settlements of composite foundations图 10为不同桩长比时长桩的桩身应力分布曲线。长桩应力随埋深呈先增大后稳定、再增大到峰值后减小的趋势,并且长桩应力峰值出现在与短桩桩端对应的埋深附近。桩身应力在埋深2.0 m内增幅较大是因为在路堤填土荷载作用下,长桩向上刺入垫层,在一定深度内使土体对长桩产生负摩阻力从而出现桩身应力变化幅度较大的现象;桩长比为0.4(对应短桩桩长为8.8 m)时,长桩应力在10.0 m处达到峰值,为1 516.54 kPa;桩长比为0.7(对应短桩桩长为15.4 m)时,长桩应力在16.0 m处达到峰值,为1 181.73 kPa。桩长比从0.4增加到0.7时,长桩桩身应力具有明显降幅,这是短桩分担部分荷载的表现。长桩应力在短桩桩端附近达到峰值,然后逐渐降低,这是由于地基深度超过短桩后,桩土刚度差异较大而产生应力集中现象,达到峰值后应力开始下降,并将荷载传递到持力层中。
3.2.2 桩间距对沉降的影响
长桩桩长取22 m,桩长比分别取为0.5和0.7,通过改变桩间距得到桩间距对复合地基沉降的影响,数值计算过程中桩间距分别为3D、4D和5D。桩间距对复合地基沉降与长桩应力影响分别如图 11、12所示。
 图 11 桩间距对复合地基沉降的影响Figure 11. Influence of pile spacing on settlements of composite foundations
图 11 桩间距对复合地基沉降的影响Figure 11. Influence of pile spacing on settlements of composite foundations由图 11可知,复合地基沉降随着桩间距增大而增大。桩长比l/L为0.5,桩间距分别取3D、4D、5D时,复合地基最大沉降分别为36.56、46.69和55.71 mm,沉降增加了19.15 mm;l/L为0.7时,最大沉降分别为28.38、38.09和45.93 mm,沉降增加了17.55 mm。桩间距为4D, l/L为0.5时,沉降为46.69 mm,桩间距取3D,l/L为0.7时,沉降为45.93 mm,二者的沉降控制效果相近;桩间距为3D,l/L为0.5时,复合地基沉降为36.56 mm,桩间距为4D,l/L为0.7时,复合地基沉降为38.09 mm,二者控制效果相近。此外,桩间距为5D,桩长比为0.5时,复合地基沉降为55.71 mm,超出规范要求(不超过50 mm),在实际工程中,为使沉降满足规范要求,桩间距为5D时桩长比应不小于0.5,桩间距为3D时,桩长比可以适当放宽。
不同桩间距时,长桩应力的分布如图 12所示。长桩应力分布与图 9中的规律基本一致,桩间距为3D和4D时,桩身应力呈增大-稳定-增大-减小的趋势,峰值出现在短桩桩端附近;桩间距为5D时,桩身应力呈增大-稳定-减小的趋势,没有明显的峰值;桩间距从3D增加到5D,长桩应力逐渐增大,在埋深16 m以上部分应力变化较为明显,并且短桩桩端以上部分具有更大的增幅,这是因桩间距增大产生应力集中。
3.2.3 短桩布置形式的影响
为了进一步提高长短桩复合地基在工程应用中的经济性,在桩间距为3D,桩长比分别为0.5和0.7的情况下,改变同一断面内相邻两长桩之间的短桩数量(一长一短、一长两短和一长三短3种布置形式),计算不同布置形式时复合地基沉降的控制情况。不同工况短桩布置形式如图 13所示,沉降与长桩应力分别如图 14、15所示。
 图 14 不同短桩布置形式的复合地基沉降Figure 14. Settlements of composite foundations with different short piles arrangements
图 14 不同短桩布置形式的复合地基沉降Figure 14. Settlements of composite foundations with different short piles arrangements 图 15 不同短桩布置形式的长桩应力Figure 15. Long pile stresses under different short piles arrangements
图 15 不同短桩布置形式的长桩应力Figure 15. Long pile stresses under different short piles arrangements在相邻两长桩之间短桩布置越多,复合地基沉降越大。桩长比为0.5时,3种短桩布置方式的沉降依次为36.56、46.69和58.26 mm,沉降变化幅度为21.70 mm;桩长比为0.7时,不同工况沉降分别为28.38、38.06和43.69 mm,沉降增加了15.31 mm,这说明桩长比较大时,随着短桩数量的增加,复合地基沉降的变化幅度更小一些,这是因为桩长比较大时短桩也可以更好发挥承载作用。桩长比为0.7,采用一长三短的布置形式,复合地基沉降为43.69 mm,桩长比为0.5,一长两短时复合地基沉降为46.69 mm这说明桩长比较大时,在两长桩之间布置更多短桩不仅实现沉降控制,也能发挥出长短桩复合地基的经济性。另外,桩长比为0.5、采用一长二短和一长三短的布置方式时,路基最大沉降超过50 mm,不满足规范要求;桩长比为0.7时,3种布置形式的最大沉降均在规范要求的50 mm以内。
由图 14可知: 3种布置方式的长桩应力分布规律较为一致,并且短桩布置越多,长桩应力越大,长桩承担的荷载越大,应力分布整体呈现增大-稳定-增大-减小的趋势,峰值出现在短桩桩端深度附近,与图 9呈现的规律相同。长桩在0至2 m埋深内桩身应力迅速增加,2至10 m内较为稳定,10~14 m内达到峰值,超过16 m后应力开始衰减。
3.3 连续-非连续耦合模型复合地基变形机理分析
本文采用PFC6.0建立连续-非连续长短桩复合地基数值模型,土体和长桩为连续模型,短桩为碎石桩,采用PFC中内置的RBlock建立碎石块体。土体和长桩参数如表 6所示。有限差分网格和离散元颗粒的边界处设置wall-zone单元,用来传递力和位移。短桩的颗粒接触采用线性接触模型[27],共生成碎石943块,块体接触参数如表 7所示,模型如图 16所示。通过计算得到填土高度3.5至5.0 m时复合地基的沉降如图 17所示。
表 7 碎石桩参数Table 7. Parameters of gravel pile接触杨氏模量/GPa 接触刚度比 接触摩擦因数 密实度 块体重度/(kN·m-3) 2.0 2.0 0.55 0.8 25  图 17 不同填土高度复合地基沉降Figure 17. Settlements of composite foundations with different filling heights
图 17 不同填土高度复合地基沉降Figure 17. Settlements of composite foundations with different filling heights计算结果云图显示了各土层和长桩的沉降,碎石桩块体位移矢量用箭头表示。在填土荷载作用下,长桩和短桩承担的荷载要大于桩间土,加之长桩、短桩和桩间土有不同的强度和模量,因此,表现出不同的变形趋势。长桩由于刚度较大并且到达了持力层,故承担了大部分荷载而产生了较小变形,短桩刚度较小以及桩端仍在软土中,因而桩顶产生了较大沉降,故复合地基表现出长桩向垫层刺入、短桩向软土刺入的变形特征。路堤填土高度为3.5 m时,变形主要发生在短桩上部,短桩上部的碎石块体有明显的压缩变形,少部分块体有侧向挤出的趋势;随着填土高度的逐渐增大,变形往深处发展,长桩的“上刺”和短桩的“下刺”现象更加明显,荷载也使更多块体产生位移,但短桩的侧向鼓胀变形仍不明显,这也说明在长短桩复合地基中长桩承担着主要的承载作用。
图 18为填土高度为3.5和5.0 m时复合地基的剪应变增量云图,土体的剪应变可以反映土体受到扰动的强弱程度。在填土荷载作用下桩土交界处的剪切变形与块体侧向挤出的作用下产生应力集中,从而对桩周土体造成扰动,随着填土高度的增加,扰动更加剧烈,从而形成连贯的剪切滑动面,即为长短桩复合地基局部的潜在滑移面。
 图 18 填土高度为3.5和5.0 m复合地基剪应变增量Figure 18. Shear strain increments of composite foundations with filling heights of 3.5 and 5.0 m
图 18 填土高度为3.5和5.0 m复合地基剪应变增量Figure 18. Shear strain increments of composite foundations with filling heights of 3.5 and 5.0 m4. 结语
(1) 在相同地质条件下,全长桩和长短桩复合地基工后沉降可以满足规范要求,其中长短桩复合地基工后沉降介于全长桩和全短桩复合地基沉降之间。
(2) 桩间距为4倍桩径时,桩长比分别为0.6和0.7时的沉降控制效果与桩间距为3倍桩径、桩长比0.4和0.5时相近;长桩桩身应力分布呈增大-稳定-增大-减小的趋势,峰值出现在短桩桩端附近,并且随着桩长比的增大长桩应力峰值逐渐下移。
(3) 桩间距为5倍桩径,桩长比不低于0.5时,复合地基沉降满足规范要求,长桩应力无明显峰值,表明桩间距增大导致应力集中加剧。
(4) 桩长比较大时,在相邻两长桩之间布置更多短桩不仅实现沉降控制,也能发挥出长短桩复合地基的经济性;短桩布置越多,长桩应力越大,但整体趋势保持不变。
(5) 不同填土高度下长短桩复合地基中碎石桩的鼓胀变形不明显,碎石块体以向下运动为主,长桩刺入垫层,短桩刺入软土,并在剪切变形与块体侧向挤出的作用下形成局部潜在滑移面。
-
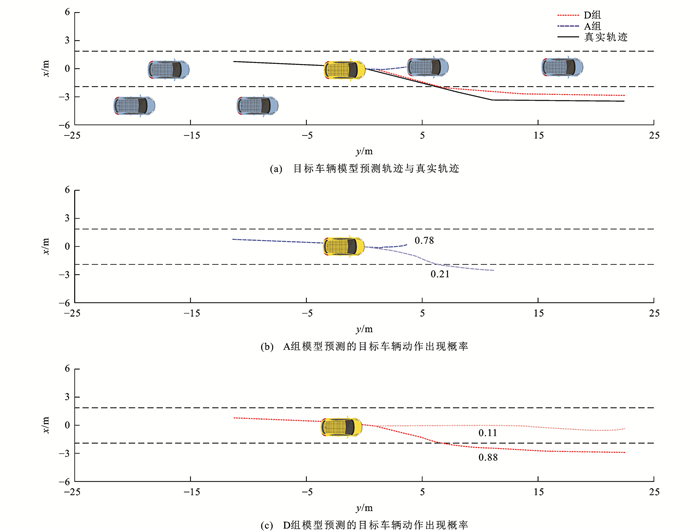
图 8 换道场景中原始与改进卷积社会池化网络预测结果对比
Figure 8. Comparison of prediction results of original and improved convolutional social pooling networks in lane changing scenario
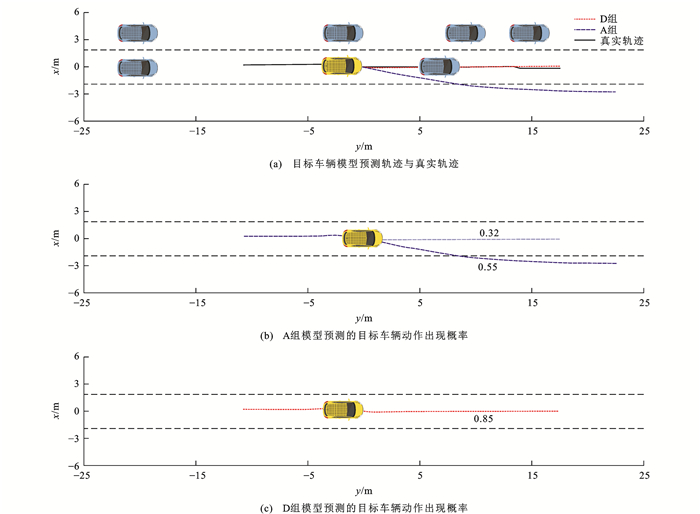
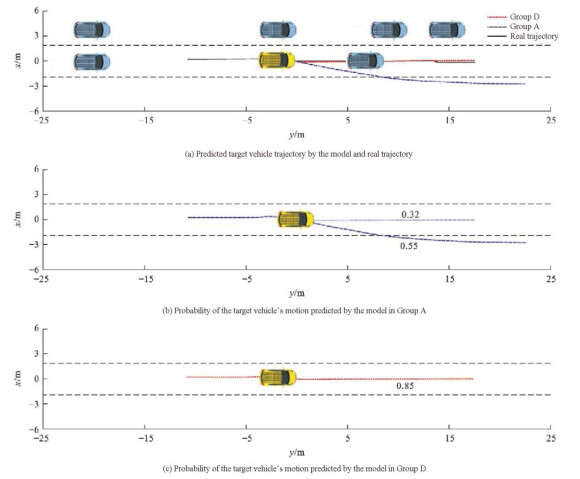
图 9 跟驰场景中原始与改进卷积社会池化网络预测结果对比
Figure 9. Comparison of prediction results of original and improved convolutional social pooling networks in car-following scenario

8. Comparison of prediction results of original and improved convolutional social pooling networks in lane changing scenario
9. Comparison of prediction results of original and improved convolutional social pooling networks in car-following scenario
表 1 轨迹预测子网络部分参数
Table 1. Partial parameters of trajectory prediction subnetwork
网络模块 网络类型 网络设置 输出数据维度 编码器 输入层 16×2 词嵌入层(Embedding) 16×32 LSTM编码层(Encoding) 64 1×64 卷积社会池化网络 社会张量(Social Tensor) 13×3 13×3×64 卷积层1(Conv1) 3×3×64 11×1×64 卷积层2(Conv2) 3×1×16 9×1×16 最大池化层(Maxpool) 2×1 5×1×16 扁平层(Flatten) 1×80 解码器 LSTM解码层(Decoding) 128 6×25×5  下载: 导出CSV
下载: 导出CSV
表 2 A~C组模型RMSE对比
Table 2. Comparison of RMSEs in model groups A-C
组别 未来不同时刻的RMSE/m 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 0.576 8 1.264 1 2.113 8 3.190 5 4.538 9 B 0.571 1 1.262 6 2.106 6 3.168 0 4.489 8 1.08 C 0.551 0 1.109 9 1.654 3 2.366 2 3.252 7 28.34
下载: 导出CSV
表 3 A~C组模型NLL对比
Table 3. Comparison of NLLs in model groups A-C
组别 未来不同时刻的NLL 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 1.575 0 3.071 3 3.928 8 4.560 1 5.085 8 B 0.689 6 2.212 2 3.083 8 3.714 1 4.228 6 16.85 C 0.728 5 2.119 6 2.843 5 3.429 6 3.923 5 22.85
下载: 导出CSV
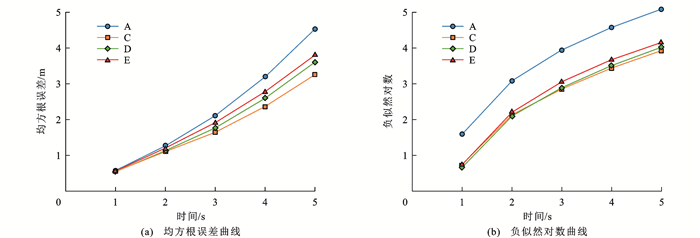
表 4 A、C~E组模型RMSE对比
Table 4. Comparison of RMSEs in model groups A and C-E
组别 未来不同时刻的RMSE/m 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 0.576 8 1.264 1 2.113 8 3.190 5 4.538 9 C 0.551 0 1.109 9 1.654 3 2.366 2 3.252 7 28.34 D 0.541 3 1.121 2 1.768 5 2.597 3 3.616 4 20.32 E 0.555 0 1.193 7 1.914 6 2.771 9 3.803 3 16.21
下载: 导出CSV
表 5 A、C~E组模型NLL对比
Table 5. Comparison of NLLs of groups A and C-E
组别 未来不同时刻的NLL 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 1.575 0 3.071 3 3.928 8 4.560 1 5.085 8 C 0.728 5 2.119 6 2.843 5 3.429 6 3.923 5 22.85 D 0.642 2 2.079 5 2.880 8 3.499 2 4.015 8 21.04 E 0.684 1 2.189 7 3.046 1 3.655 7 4.147 1 18.46
下载: 导出CSV
表 6 A、F组模型RMSE对比
Table 6. Comparison of RMSEs in model groups A and F
组别 未来不同时刻的RMSE/m 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 0.576 8 1.264 1 2.113 8 3.190 5 4.538 9 F 0.577 6 1.256 6 2.100 2 3.172 9 4.495 5 0.96
下载: 导出CSV
表 7 A、F组模型NLL对比
Table 7. Comparison of NLLs in model groups A and F
组别 未来不同时刻的NLL 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 1.575 0 3.071 3 3.928 8 4.560 1 5.085 8 F 1.638 9 3.118 7 3.965 0 4.589 9 5.100 7 -0.29
下载: 导出CSV
表 8 模型耗时对比
Table 8. Time-consuming comparison of models
组别 A B C D E F 时间/ms 10.71 12.21 12.81 13.81 14.69 20.07
下载: 导出CSV
1. Partial parameters of trajectory prediction subnetwork

2. Comparison of RMSEs in model groups A–C

3. Comparison of NLLs in model groups A–C

4. Comparison of RMSEs in model groups A and C–E

5. Comparison of NLLs of groups A and C–E

6. Comparison of RMSEs in model groups A and F

7. Comparison of NLLs in model groups A and F

8. Time-consuming comparison of models

-
[1] 李立, 徐志刚, 赵祥模, 等. 智能网联汽车运动规划方法研究综述[J]. 中国公路学报, 2019, 32(6): 20-33. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906003.htmLI Li, XU Zhi-gang, ZHAO Xiang-mo, et al. Review of motion planning methods of intelligent connected vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 20-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906003.htm [2] 采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. doi: 10.3969/j.issn.1674-8484.2021.03.002CAI Guo-shun, LIU Hao-ji, FENG Ji-wei, et al. Review on the research of motion planning and control for intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2021, 12(3): 279-297. (in Chinese) doi: 10.3969/j.issn.1674-8484.2021.03.002 [3] 李柏, 张友民, 邵之江. 自动驾驶车辆运动规划方法综述[J]. 控制与信息技术, 2018(6): 1-6. https://www.cnki.com.cn/Article/CJFDTOTAL-BLJS201806002.htmLI Bai, ZHANG You-min, SHAO Zhi-jiang. Motion planning methodologies for automated vehicles: a critical review[J]. Control and Information Technology, 2018(6): 1-6. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BLJS201806002.htm [4] 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72. doi: 10.19818/j.cnki.1671-1637.2020.05.004YANG Lan, ZHAO Xiang-mo, WU Guo-yuan, et al. Review on connected and automated vehicles based cooperative eco-driving strategies[J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.05.004 [5] 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127. doi: 10.3969/j.issn.1001-7372.2012.01.018WANG Dian-hai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. (in Chinese) doi: 10.3969/j.issn.1001-7372.2012.01.018 [6] ZHENG Zu-duo. Recent developments and research needs in modeling lane changing[J]. Transportation Research Part B: Methodological, 2014, 60: 16-32. doi: 10.1016/j.trb.2013.11.009 [7] SCHREIER M, WILLERT V, ADAMY J. An integrated approach to maneuver-based trajectory prediction and criticality assessment in arbitrary road environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2751-2766. doi: 10.1109/TITS.2016.2522507 [8] SIMMONS R, BROWNING B, ZHANG Yi-lu, et al. Learning to predict driver route and destination intent[C]//IEEE. 2006 IEEE Intelligent Transportation Systems Conference. New York: IEEE, 2006: 127-132. [9] RATHORE P, KUMAR D, RAJASEGARAR S, et al. A scalable framework for trajectory prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(10): 3860-3874. doi: 10.1109/TITS.2019.2899179 [10] ALTCHÉ F, DE LA FORTELLE A. An LSTM network for highway trajectory prediction[C]//IEEE. 2017 IEEE 20th International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 353-359. [11] ZHANG Xiao-hui, SUN Jie, QI Xiao, et al. Simultaneous modeling of car-following and lane-changing behaviors using deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019, 104: 287-304. doi: 10.1016/j.trc.2019.05.021 [12] XING Yang, LYU Chen, MO Xiao-yu, et al. Toward safe and smart mobility: energy-aware deep learning for driving behavior analysis and prediction of connected vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(7): 4267-4280. doi: 10.1109/TITS.2021.3052786 [13] CHEN Meng, ZUO Yi-xuan, JIA Xiao-yi, et al. CEM: a convolutional embedding model for predicting next locations[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(7): 3349-3358. [14] ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]//IEEE. 2016 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2016: 961-971. [15] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. [16] 赵祥模, 连心雨, 刘占文, 等. 基于MM-STConv的端到端自动驾驶行为决策模型[J]. 中国公路学报, 2020, 33(3): 170-183. doi: 10.3969/j.issn.1001-7372.2020.03.016ZHAO Xiang-mo, LIAN Xin-yu, LIU Zhan-wen, et al. End-to-end autonomous driving-behavior decision model based on MM-STConv[J]. China Journal of Highway and Transport, 2020, 33(3): 170-183. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.03.016 [17] DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]//IEEE. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. New York: IEEE, 2018: 1549-1557. [18] MAHMUDS M, FERREIRA L, HOQUE M S, et al. Application of proximal surrogate indicators for safety evaluation: a review of recent developments and research needs[J]. IATSS Research, 2017, 41(4): 153-163. [19] PINNOWJ, MASOUD M, ELHENAWY M, et al. A review of naturalistic driving study surrogates and surrogate indicator viability within the context of different road geometries[J]. Accident Analysis and Prevention, 2021, 157: 106185. [20] CHO K, VAN MERRIENBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[C]//IEEE. Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing. New York: IEEE, 2014: 1724-1734. [21] CHUNG J, GULCEHRE C, CHO K H, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[C]//MIT Press. 28th Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2014: 1-9. [22] 刘创, 梁军. 基于注意力机制的车辆运动轨迹预测[J]. 浙江大学学报(工学版), 2020, 54(6): 1156-1163. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC202006012.htmLIU Chuang, LIANG Jun. Vehicle motion trajectory prediction based on attention mechanism[J]. Journal of Zhejiang University (Engineering Science), 2020, 54(6): 1156-1163. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC202006012.htm [23] HASAN M, SOLERNOU A, PASCHALIDIS E, et al. Maneuver-aware pooling for vehicle trajectory prediction[J]. arXiv, 2021: 20210095519. -


 下载:
下载:





















 点击查看大图
点击查看大图

计量
- 文章访问数: 1493
- HTML全文浏览量: 510
- PDF下载量: 215
- 被引次数: 0
