

Vehicle-infrastructure cooperative control method of connected and signalized intersection in mixed traffic environment
-
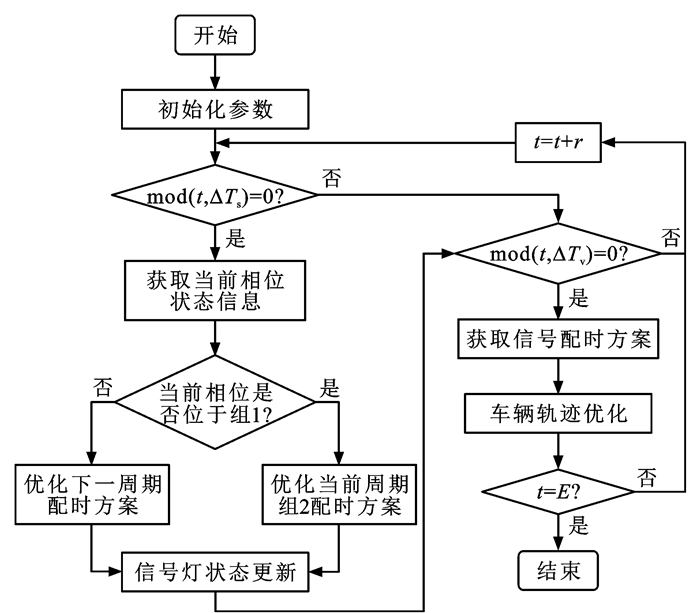
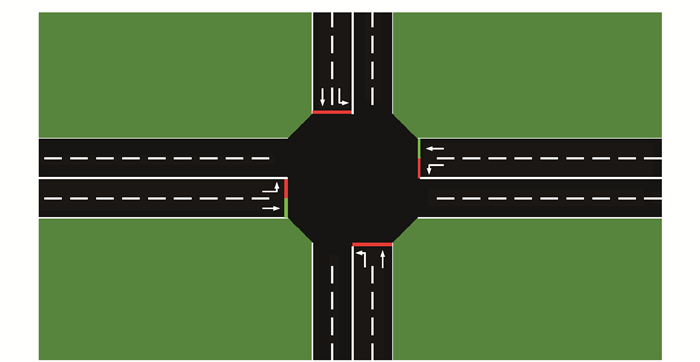
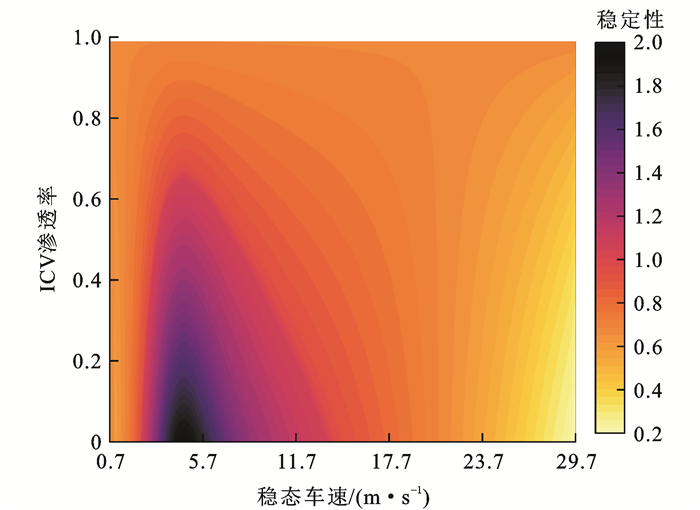
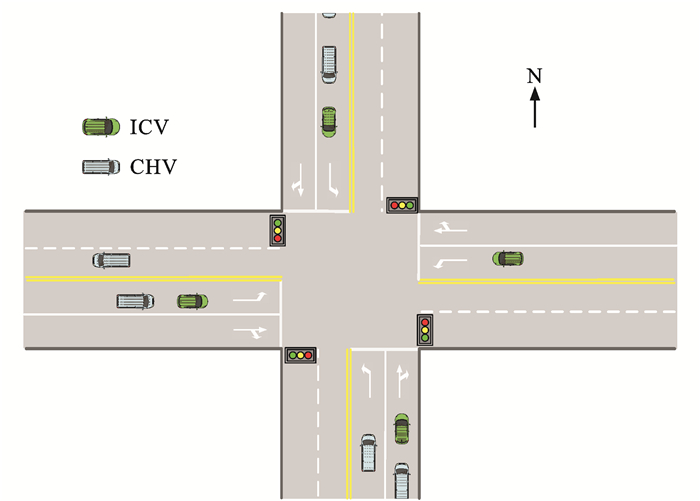
摘要: 为了提高网联信号交叉口车路协同控制对真实交通环境的适应性,以智能网联汽车与网联人工驾驶汽车混行的典型交通应用场景为研究对象,通过构建八相位网联信号交叉口,研究了混行环境下的交通信号和网联车辆轨迹车路协同优化控制方法;在对场景中的网联车辆运动学特性和跟驰行为进行建模的基础上,构建了一种混行车辆编队方法;基于混行车队模型、安全约束与燃油消耗模型,建立了基于滚动优化的交通信号-车辆轨迹协同优化控制方法;基于异步分层优化思路,将该协同控制问题分解为上层交通信号优化与下层车辆轨迹优化两方面,以交叉口车辆行驶延误时间和燃油消耗量为优化目标,利用遗传算法和“三段式”轨迹优化法分别对交通信号优化问题与车辆轨迹优化问题进行求解;对不同稳态车速与智能网联汽车渗透率下构建的混行交通流的稳定性进行了验证,并通过仿真测试分析了所提出的协同优化控制方法的控制效能与关键参数对控制效能的影响。分析结果表明:在不同交通流量与智能网联汽车渗透率下,提出的控制方法均可有效提升交叉口通行效率与燃油经济性;在完全渗透环境下,较固定配时交通信号控制方法最高可分别提升57.3%和13.3%;随着智能网联汽车渗透率的增加,其控制效能不断提高,较无渗透条件最高可分别提升42.0%和14.2%;即使智能网联汽车渗透率仅达到20%,较无渗透条件也可以在交通效率方面实现20.4%的显著改善;较长的交通信号周期与较短的网联人工驾驶汽车驾驶人反应时间有助于协同控制效能的提升。Abstract: In order to improve the adaption of intelligent vehicle-infrastructure cooperative control methods around connected and signalized intersection to real traffic environment, a novel intelligent vehicle-infrastructure cooperative optimization control method was proposed under the traffic scene of eight-phase connected and signalized intersection mixed intelligent and connected vehicle (ICV) with connected and human-driven vehicle (CHV). Based on modeling the kinematic characteristics and car-following behavior of ICV in the mixed traffic scene, a mixed platoon was formed. A rolling optimization-based cooperative control method of traffic signal and ICV trajectory was proposed based on the platoon model, safety constraints, and fuel consumption model. The cooperative control problem was divided into two layers based on the idea of asynchronous hierarchical optimization, the upper layer was traffic signal timing optimization, and the lower layer was ICV trajectory optimization. Taking the travel time delay and fuel consumption of the vehicle at the intersection as the optimization objectives, the genetic algorithm and three-stage trajectory optimization method were used to solve the traffic signal timing optimization and ICV trajectory optimization, respectively. The stability of the mixed vehicle platoon was verified under different steady-state speeds and penetration rates of ICV. The control effect of the proposed control method and the influence of key parameters on the control effect were analyzed. Analysis results indicate that the proposed control method can effectively improve the traffic efficiency and fuel economy of the intersection under various traffic flows and penetration rates of ICV. In the total ICV environment, the indexes respectively improve by 57.3% and 13.3% when the proposed control method is compared with the method without optimization. Compared with the condition without penetration, with the increase of the penetration rate of ICV, the control efficiency of the proposed control method constantly improves, and the indexes respectively increase by 42.0% and 14.2%. Even if the penetration rate of ICV is only 20%, the proposed control method can also achieve 20.4% improvement in the term of traffic efficiency. The longer traffic signal cycle and the shorter driver reaction time of CHV can provide a benefit for the cooperative control effect. 2 tabs, 13 figs, 40 refs.
-

图 8 不同交通流量下的平均旅行时间延误
Figure 8. Average travel time delays under different traffic flows

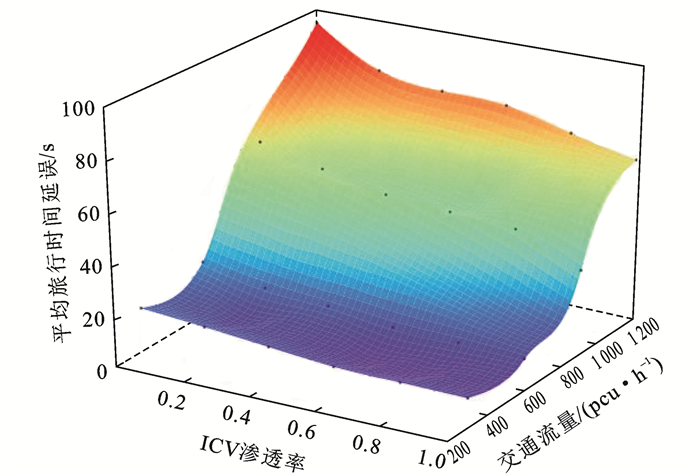
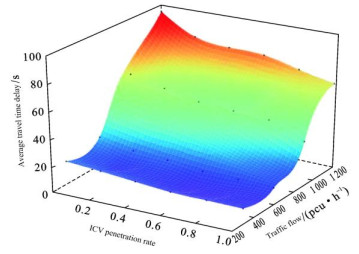
图 10 不同交通流量和ICV渗透率下平均旅行时间延误
Figure 10. Average travel time delays under different traffic flows and penetration rates of ICV

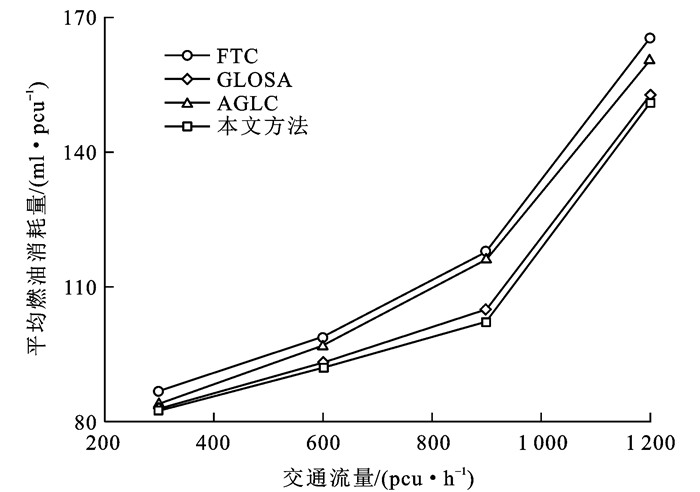
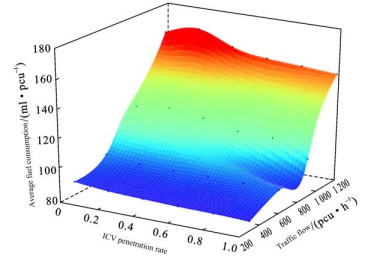
图 11 不同交通流量和ICV渗透率下平均燃油消耗量
Figure 11. Average fuel consumptions under different traffic flows and penetration rates of ICV

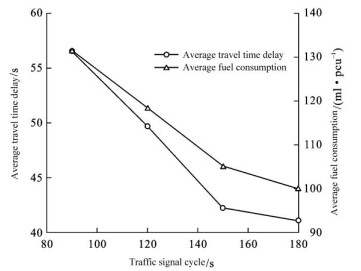
图 12 不同交通信号周期长度对协同控制方法的影响
Figure 12. Influence of different signal cycles on proposed cooperative control method

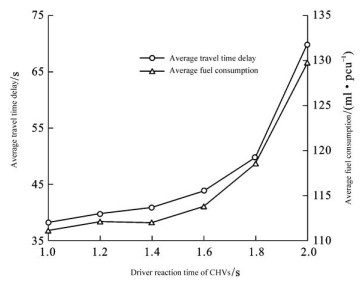
图 13 不同CHV驾驶人反应时间对协同控制方法的影响
Figure 13. Influence of different drivers' reaction times of CHV on proposed cooperative control method

10. Average travel time delays under different traffic flows and ICV penetration rates

13. Influence of different driver reaction times of CHV on the proposed cooperative control method
表 1 仿真参数设置
Table 1. Simulation parameter setting
参数 取值 参数 取值 道路限速/(m·s-1) 11.11 黄灯时长/s 2 车道宽度/m 3.5 仿真步长/s 0.5 最小绿灯时长/s 10 GA种群规模 100 最大绿灯时长/s 40 GA交叉概率 0.8 交通信号周期/s 120 GA变异概率 0.05 交通信号优化间隔/s 30 DBSCAN扫描半径/m 50 车辆轨迹优化间隔/s 0.5 DBSCAN最小包含车辆数/pcu 1  下载: 导出CSV
下载: 导出CSV
表 2 ICV与CHV跟驰模型参数取值
Table 2. Parameter values of ICV and CHV following models
IDM模型参数 取值 CACC模型参数 取值 amax/(m·s-2) 4 kp 0.45 s0/m 2 kd 0.25 TI/s 2 TC/s 0.6 b/(m·s-2) 2 Δt/s 0.01 δ 4 vt0/(m·s-1) 11.11
下载: 导出CSV
1. Simulation parameter setting

2. Parameter values of ICV and CHV following models

-
[1] 赵冬斌, 刘德荣, 易建强. 基于自适应动态规划的城市交通信号优化控制方法综述[J]. 自动化学报, 2009, 35(6): 676-681. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO200906008.htmZHAO Dong-bin, LIU De-rong, YI Jian-qiang. An overview on the adaptive dynamic programming based urban city traffic signal optimal control[J]. Acta Automatica Sinica, 2009, 35(6): 676-681. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO200906008.htm [2] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI Ke-qiang, DAI Yi-fan, LI Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. (in Chinese) doi: 10.3969/j.issn.1674-8484.2017.01.001 [3] WANG Run-min, ZHANG Xin-rui, XU Zhi-gang, et al. Research on performance and function testing of V2X in a closed test field[J]. Journal of Advanced Transportation, 2021, 2021: 9970978. [4] HE Qing, HEAD K L, DING Jun. PAMSCOD: platoon-based arterial multi-modal signal control with online data[J]. Transportation Research Part C: Emerging Technologies, 2012, 20(1): 164-184. doi: 10.1016/j.trc.2011.05.007 [5] FENG Yi-heng, HEAD K L, KHOSHMAGHAM S, et al. A real-time adaptive signal control in a connected vehicle environment[J]. Transportation Research Part C: Emerging Technologies, 2015, 55: 460-473. doi: 10.1016/j.trc.2015.01.007 [6] YAO Zhi-hong, JIANG Yang-sheng, ZHAO Bin, et al. A dynamic optimization method for adaptive signal control in a connected vehicle environment[J]. Journal of Intelligent Transportation Systems, 2020, 24(2): 184-200. doi: 10.1080/15472450.2019.1643723 [7] BANI YOUNES M, BOUKERCHE A. Intelligent traffic light controlling algorithms using vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2016, 65(8): 5887-5899. doi: 10.1109/TVT.2015.2472367 [8] WANG Qin-zheng, YUAN Yun, YANG Xian-feng, et al. Adaptive and multi-path progression signal control under connected vehicle environment[J]. Transportation Research Part C: Emerging Technologies, 2021, 124: 102965. doi: 10.1016/j.trc.2021.102965 [9] AREL I, LIU C, URBANIK T, et al. Reinforcement learning-based multi-agent system for network traffic signal control[J]. IET Intelligent Transport Systems, 2010, 4(2): 128-135. doi: 10.1049/iet-its.2009.0070 [10] ISLAM S M A B A, HAJBABAIE A. Distributed coordinated signal timing optimization in connected transportation networks[J]. Transportation Research Part C: Emerging Technologies, 2017, 80: 272-285. doi: 10.1016/j.trc.2017.04.017 [11] COȘKUN M, BAGGAG A, CHAWLA S. Deep reinforcement learning for traffic light optimization[C]//IEEE. 2018 IEEE International Conference on Data Mining Workshops. New York: IEEE, 2018: 564-571. [12] WU Tong, ZHOU Pan, LIU Kai, et al. Multi-agent deep reinforcement learning for urban traffic light control in vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8243-8256. doi: 10.1109/TVT.2020.2997896 [13] 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72. doi: 10.19818/j.cnki.1671-1637.2020.05.004YANG Lan, ZHAO Xiang-mo, WU Guo-yuan, et al. Review on connected and automated vehicles based cooperative eco-driving strategies[J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.05.004 [14] RAKHA H, KAMALANATHSHARMA R K. Eco-driving at signalized intersections using V2I communication[C]//IEEE. 2011 14th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2011: 341-346. [15] ALA M V, YANG Hao, RAKHA H. Modeling evaluation of eco-cooperative adaptive cruise control in vicinity of signalized intersections[J]. Transportation Research Record, 2016, 2559(1): 108-119. doi: 10.3141/2559-13 [16] YANG Hao, RAKHA H, ALA M V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1575-1585. [17] MANDAVA S, BORIBOONSOMSIN K, BARTH M. Arterial velocity planning based on traffic signal information under light traffic conditions[C]//IEEE. 2009 12th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2009: 1-6. [18] BARTH M, MANDAVA S, BORIBOONSOMSIN K, et al. Dynamic eco-driving for arterial corridors[C]//IEEE. 2011 IEEE Forum on Integrated and Sustainable Transportation System. New York: IEEE, 2011: 182-188. [19] XIA Hai-tao, BORIBOONSOMSIN K, BARTH M. Dynamic eco-driving for signalized arterial corridors and its indirect network-wide energy/emissions benefits[J]. Journal of Intelligent Transportation Systems, 2013, 17(1): 31-41. doi: 10.1080/15472450.2012.712494 [20] MAHLER G, VAHIDI A. Reducing idling at red lights based on probabilistic prediction of traffic signal timings[C]//IEEE. 2012 American Control Conference. New York: IEEE, 2012: 6557-6562. [21] SEREDYNSKI M, MAZURCZYK W, KHADRAOUI D. Multi-segment green light optimal speed advisory[C]//IEEE. 2013 IEEE International Symposium on Parallel and Distributed Processing, Workshops and PhD Forum. New York: IEEE, 2013: 459-465. [22] STEBBINS S, HICKMAN M, KIM J, et al. Characterising green light optimal speed advisory trajectories for platoon-based optimisation[J]. Transportation Research Part C: Emerging Technologies, 2017, 82: 43-62. doi: 10.1016/j.trc.2017.06.014 [23] KAMAL M A S, MUKAI M, MURATA J, et al. Model predictive control of vehicles on urban roads for improved fuel economy[J]. IEEE Transactions on Control Systems Technology, 2013, 21(3): 831-841. doi: 10.1109/TCST.2012.2198478 [24] ALRIFAEE B, JODAR J G, ABEL D. Decentralized predictive cruise control for energy saving in REEV using V2I information for multiple-vehicles[J]. IFAC-PapersOnLine, 2015, 48(15): 320-327. doi: 10.1016/j.ifacol.2015.10.046 [25] LI Zhuo-fei, ELEFTERIADOU L, RANKA S. Signal control optimization for automated vehicles at isolated signalized intersections[J]. Transportation Research Part C: Emerging Technologies, 2014, 49: 1-18. doi: 10.1016/j.trc.2014.10.001 [26] FENG Yi-heng, YU Chun-hui, LIU H X. Spatiotemporal intersection control in a connected and automated vehicle environment[J]. Transportation Research Part C: Emerging Technologies, 2018, 89: 364-383. doi: 10.1016/j.trc.2018.02.001 [27] YU Chun-hui, FENG Yi-heng, LIU H X, et al. Integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections[J]. Transportation Research Part B: Methodological, 2018, 112: 89-112. doi: 10.1016/j.trb.2018.04.007 [28] 王云鹏, 郭戈. 城市交叉口车辆速度与交通信号协同优化控制[J]. 控制与决策, 2019, 34(11): 2397-2406. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201911017.htmWANG Yun-peng, GUO Ge. Joint optimization of vehicle speed and traffic signals at a signalized intersection[J]. Control and Decision, 2019, 34(11): 2397-2406. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201911017.htm [29] WANG Zi-ran, WU Guo-yuan, BARTH M J. Cooperative eco-driving at signalized intersections in a partially connected and automated vehicle environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(5): 2029-2038. doi: 10.1109/TITS.2019.2911607 [30] NIROUMAND R, TAJALLI M, HAJIBABAI L, et al. Joint optimization of vehicle-group trajectory and signal timing: Introducing the white phase for mixed-autonomy traffic stream[J]. Transportation Research Part C: Emerging Technologies, 2020, 116: 102659. doi: 10.1016/j.trc.2020.102659 [31] KOONCE P, RODEGERDTS L. Traffic signal timing manual[R]. Washington DC: Federal Highway Administration, 2008. [32] 秦严严, 王昊, 王炜. 智能网联环境下的混合交通流LWR模型[J]. 中国公路学报, 2018, 31(11): 147-156. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201811017.htmQIN Yan-yan, WANG Hao, WANG Wei. LWR model for mixed traffic flow in connected and autonomous vehicular environments[J]. China Journal of Highway and Transport, 2018, 31(11): 147-156. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201811017.htm [33] XIAO Lin, WANG Meng, VAN AREM B. Realistic car- following models for microscopic simulation of adaptive and cooperative adaptive cruise control vehicles[J]. Transportation Research Record, 2017, 2623(1): 1-9. doi: 10.3141/2623-01 [34] MILANÉS V, SHLADOVER S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. doi: 10.1016/j.trc.2014.09.001 [35] XIAO Lin, WANG Meng, SCHAKEL W, et al. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks[J]. Transportation Research Part C: Emerging Technologies, 2018, 96: 380-397. [36] KAMALANATHSHARMA R K, RAKHA H A. Leveraging connected vehicle technology and telematics to enhance vehicle fuel efficiency in the vicinity of signalized intersections[J]. Journal of Intelligent Transportation Systems, 2016, 20(1): 33-44. doi: 10.1080/15472450.2014.889916 [37] ZHAO Wei-ming, NGODUY D, SHEPHERD S, et al. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802-821. doi: 10.1016/j.trc.2018.05.025 [38] XIE Dong-fan, ZHAO Xiao-mei, HE Zhen-bing. Heterogeneous traffic mixing regular and connected vehicles: modeling and stabilization[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2060-2071. [39] KESTING A, TREIBER M. How reaction time, update time, and adaptation time influence the stability of traffic flow[J]. Computer Aided Civil and Infrastructure Engineering, 2008, 23(2): 125-137. [40] 王昊, 秦严严. 网联车混合交通流渐进稳定性解析方法[J]. 哈尔滨工业大学学报, 2019, 51(3): 88-91. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201903013.htmWANG Hao, QIN Yan-yan. Asymptotic stability analysis of traffic flow mixed with connected vehicles[J]. Journal of Harbin Institute of Technology, 2019, 51(3): 88-91. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201903013.htm -











 点击查看大图
点击查看大图
计量
- 文章访问数: 1889
- HTML全文浏览量: 595
- PDF下载量: 264
- 被引次数: 0
