

Mixed traffic group throttling control strategy for traffic bottleneck of expressway
-
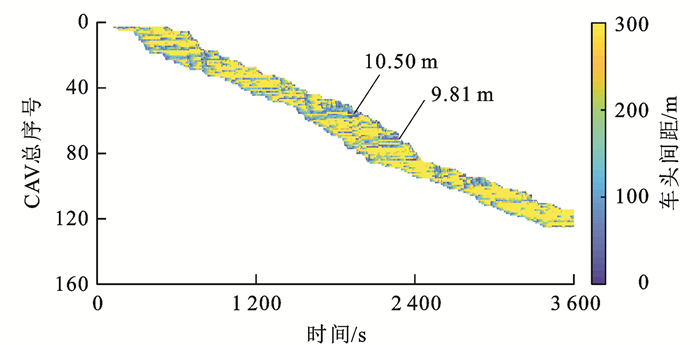
摘要: 针对传统人驾车(HV)和网联自动车(CAV)组成混合交通条件下的快速路道路缩减瓶颈问题,从群体控制角度,提出了一种新的速度协调控制策略(简称节流控制策略);基于瓶颈交通状态和Greenshields模型,设计了领航CAV速度控制器;面向CAV节流群体组群过程的控制问题,提出了目标切换下的非线性控制器;构建了CAV节流群体类队列控制器,实现了基于瓶颈交通状态的群体形态与群体速度动态调节,进而联合领航CAV速度控制方法,周期性管控超过每组节流群体的车辆;提出了CAV纵向安全控制器来解决组群和群体演化过程的车辆安全问题。仿真结果表明:在快速路瓶颈路段下,对比传统交通系统,提出的动态节流控制策略CAV渗透率达到5%,在车流量分别为2 000、3 000、5 000、6 000 veh·h-1条件下,可对应分别提高通行效率约5.87%、16.97%、11.07%、10.25%;在固定车流量为3 000或6 000 veh·h-1的快速路混合交通瓶颈路段中,对比传统交通系统,若CAV渗透率分别为10%、20%、30%,受控交通系统的通行效率可提升约24%;通过对车头间距分析,受控CAV在节流全过程中无碰撞事故发生,且可与前车保持9 m以上安全距离。可见,节流控制策略在应对快速路瓶颈问题是有效的。Abstract: Considering the lane reduction bottleneck of expressways under mixed traffic condition composed of human-driven vehicles (HVs) and connected and automated vehicles (CAVs), a novel speed harmonization control strategy (throttling control strategy for short) was developed from the viewpoint of group control. A speed controller for the leading CAV was designed on the basis of the bottleneck traffic state and the Greenshields model. A nonlinear controller for the target changing was developed for the control during the CAV throttling group formation. A platoon-like controller for the CAV throttling group was built, and the group formation and group speed were thereby regulated dynamically according to the bottleneck traffic state. The speed control method for the leading CAV was combined to regulate the vehicles overtaking each throttling group periodically. A longitudinal safety controller for the CAV was presented to resolve the vehicle safety problem in the processes of group formation and group evolution. Simulation results show that, on the bottleneck road of the expressway, compared with the traditional traffic system, the proposed dynamic throttling control strategy is applied when the CAV penetration rate reaches 5% and vehicle flow is 2 000, 3 000, 5 000 and 6 000 veh·h-1, respectively, the corresponding traffic efficiency improves about 5.87%, 16.97%, 11.07%, and 10.25%, respectively. On an expressway bottleneck road with a fixed traffic flow of 3 000 or 6 000 veh·h-1, compared with the traditional traffic system, the traffic efficiency of the controlled traffic system can be enhanced by around 24% when the CAV penetration rate reaches 10%, 20%, and 30%, respectively. According to the analysis of space headways, the controlled CAVs can avoid collision during the entire throttling process and keep a safe distance of more than 9 m from their predecessors. Therefore, the throttling control strategy is effective in dealing with the bottleneck problem of expressway. 3 tabs, 15 figs, 30 refs.
-

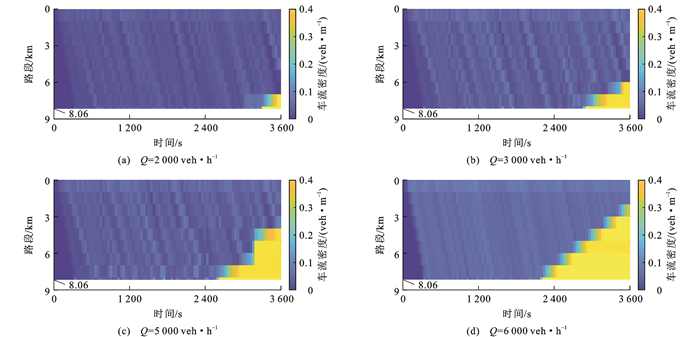
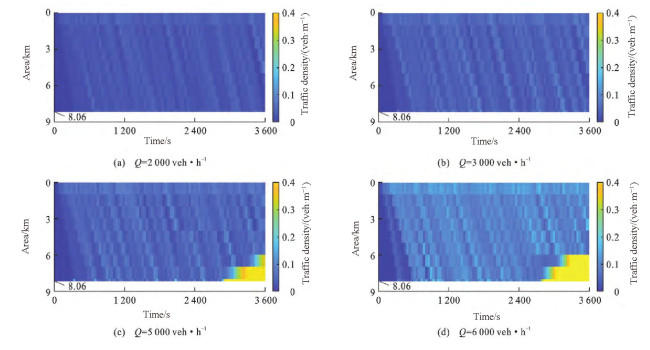
图 7 pCAV=0及无控制下车流密度-时间热力图
Figure 7. Density-time heat maps of traffic flow without control at pCAV=0

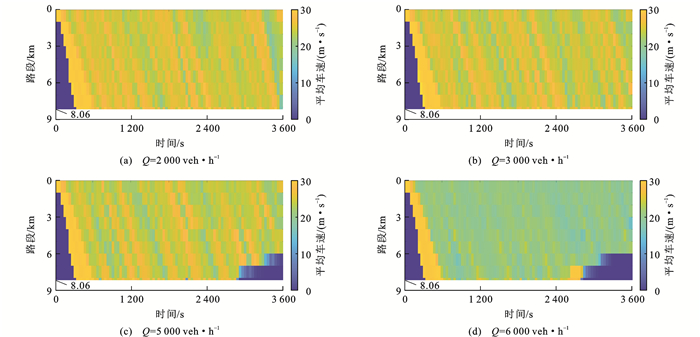
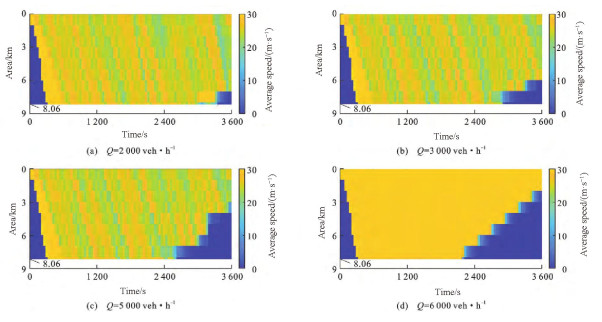
图 8 pCAV=0及无控制下平均车速-时间热力图
Figure 8. Average velocity-time heat maps without control at pCAV=0

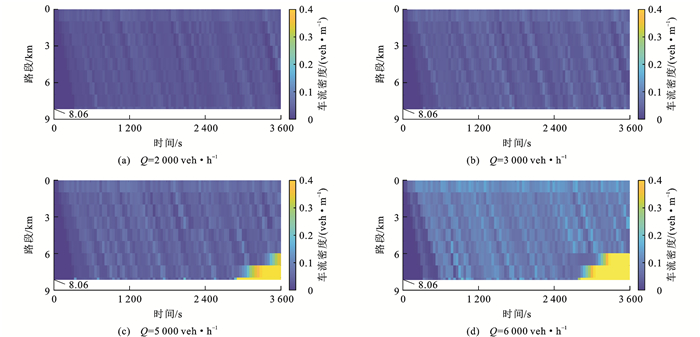
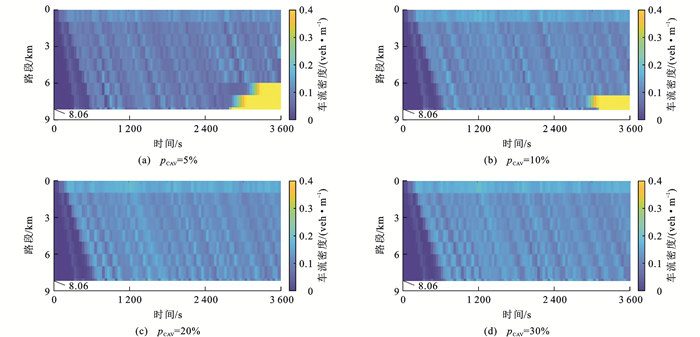
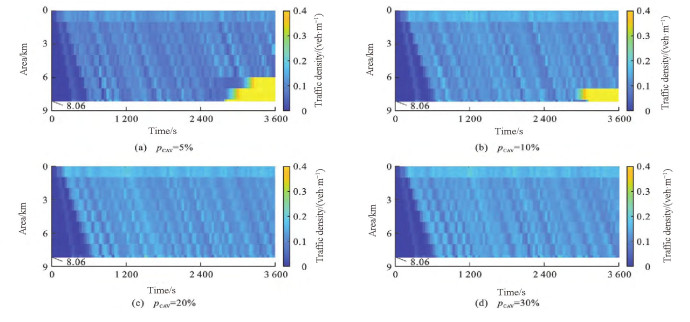
图 9 pCAV=5%及节流控制下车流密度-时间热力图
Figure 9. Density-time heat maps of traffic flow under throttling control at pCAV=5%

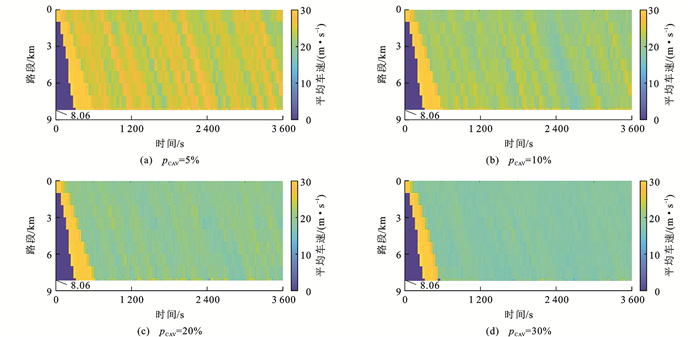
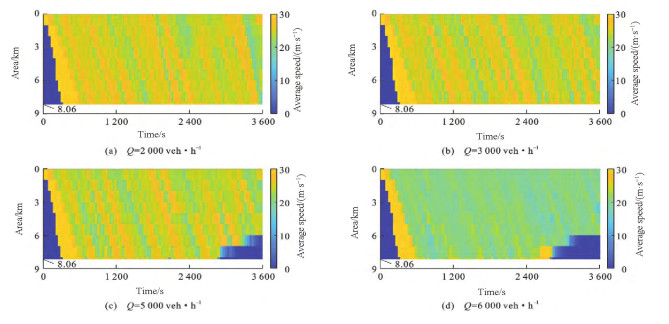
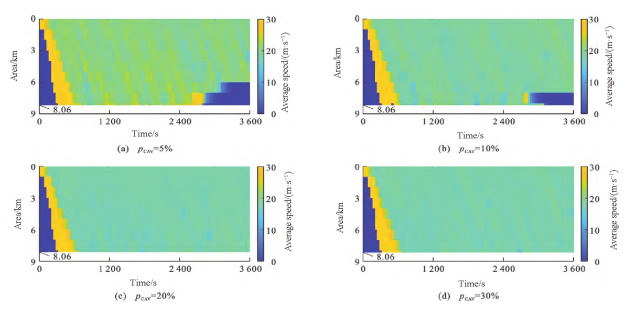
图 10 pCAV=5%及节流控制下平均车速-时间热力图
Figure 10. Average velocity-time heat maps under throttling control at pCAV=5%

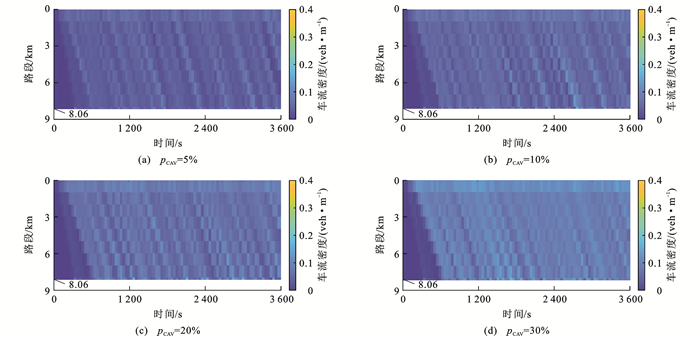
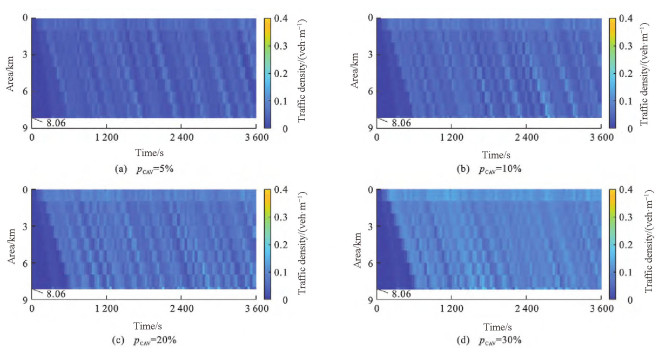
图 11 Q=3 000 veh·h-1及节流控制下车流密度-时间热力图
Figure 11. Density-time heat maps of traffic flow under throttling control at Q=3 000 veh·h-1

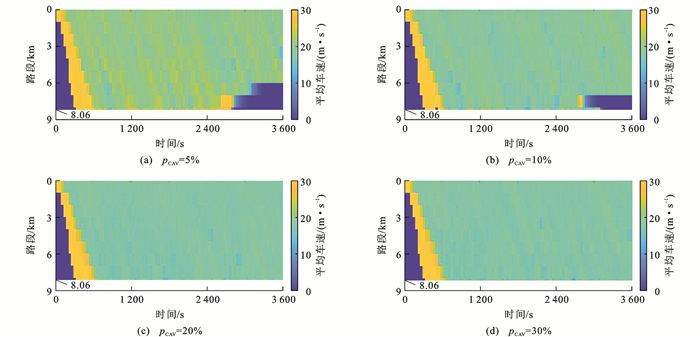
图 12 Q=3 000 veh·h-1及节流控制下平均车速-时间热力图
Figure 12. Average velocity-time heat maps under throttling control at Q=3 000 veh·h-1

图 13 Q=6 000 veh·h-1及节流控制下车流密度-时间热力图
Figure 13. Density-time heat maps of traffic flow under throttling control at Q=6 000 veh·h-1

图 14 Q=6 000 veh·h-1及节流控制下平均车速-时间热力图
Figure 14. Average velocity-time heat maps under throttling control at Q=6 000 veh·h-1

11. Density–time heat maps of traffic flow with throttling control at Q = 3 000 veh·h-1

13. Density–time heat maps of traffic flow with throttling control at Q = 6 000 veh·h-1
表 1 VISSIM换道模型参数取值
Table 1. Parameter values of lane-changing model in VISSIM
参数 取值 必要的跟换车道 最大减速度/(m·s-2) 本车为-4,被超车为-3 单位减速度变化率对应距离/m 本车与被超车均为100 可接受的减速度/(m·s-2) 本车与被超车均为-1 消失前的等待时间/s 60 最小车头空距(前/后)/m 0.5 协调刹车的最大减速度/(m·s-2) -3  下载: 导出CSV
下载: 导出CSV
表 2 VISSIM跟驰模型参数取值
Table 2. Parameter values of car-following model in VISSIM
跟驰模型 Wiedemann 99 停车时的平均期望车辆间距/m 2.0 期望保持的车头时间距/m 2.0 前视距离/m 最小为0, 最大为250 后视距离/m 最小为0,最大为250
下载: 导出CSV
表 3 1 h通过瓶颈区车辆数统计
Table 3. Statistics of vehicles passing bottleneck region in 1 h
控制方式 车流量/(veh·h-1) 预设CAV渗透率/% 通过瓶颈区车辆数 效率提升比/% 无控制 2 000 0 1 804 3 000 0 2 310 5 000 0 3 818 6 000 0 3 676 节流控制 2 000 5 1 910 5.87 3 000 5 2 702 16.97 5 000 5 4 241 11.07 6 000 5 4 053 10.26 3 000 10 2 787 20.65 3 000 20 2 812 21.73 3 000 30 2 885 24.89 6 000 10 4 633 26.03 6 000 20 4 915 33.70 6 000 30 5 008 36.23
下载: 导出CSV
1. Parameters and values of lane changing model in VISSIM

2. Parameters and values of car following model in VISSIM

3. Data of vehicles passing through the bottleneck area within one hour

-
[1] WANG Jia-wei, ZHENG Yang, CHEN Chao-yi, et al. Leading cruise control in mixed traffic flow: system modeling, controllability, and string stability[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, DOI: 10.1109/TITS.2021.3118021. [2] GUO Qian-qiang, BAN Xue-gang, AZIZ H M A. Mixed traffic flow of human driven vehicles and automated vehicles on dynamic transportation networks[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103159. doi: 10.1016/j.trc.2021.103159 [3] SARKER A, SHEN H Y, RAHMAN M, et al. A review of sensing and communication, human factors, and controller aspects for information-aware connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 7-29. doi: 10.1109/TITS.2019.2892399 [4] MA Jia-qi, LI Xiao-peng, SHLADOVER S, et al. Freeway speed harmonization[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 78-89. doi: 10.1109/TIV.2016.2551540 [5] ENGLUND C, CHEN L, VORONOV A. Cooperative speed harmonization for efficient road utilization[C]//IEEE. 7th International Workshop on Communication Technologies for Vehicles. New York: IEEE, 2014: 19-23. [6] YANG H, RAKHA H. Feedback control speed harmonization algorithm: methodology and preliminary testing[J]. Transportation Research Part C: Emerging Technologies, 2017, 81: 209-226. doi: 10.1016/j.trc.2017.06.002 [7] LU Xiao-yun, SHLADOVER S E. Review of variable speed limits and advisories[J]. Journal of the Transportation Research Board, 2014, 2423(1): 15-23. doi: 10.3141/2423-03 [8] ZHANG Yi-hang, IOANNOU P A. Combined variable speed limit and lane change control for highway traffic[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(7): 1812-1823. doi: 10.1109/TITS.2016.2616493 [9] GRUMERT E, MA Xiao-liang, TAPANI A. Analysis of a cooperative variable speed limit system using microscopic traffic simulation[J]. Transportation Research Part C: Emerging Technologies, 2015, 52: 173-186. doi: 10.1016/j.trc.2014.11.004 [10] JIN Hui-yun, JIN Wen-long. Control of a lane-drop bottleneck through variable speed limits[J]. Transportation Research Part C: Emerging Technologies, 2015, 58: 568-584. doi: 10.1016/j.trc.2014.08.024 [11] WU Yuan-kai, TAN Hua-chun, QIN Ling-qiao, et al. Differential variable speed limits control for freeway recurrent bottlenecks via deep reinforcement learning[J]. Transportation Research Part C: Emerging Technologies, 2020, 117: 102649. doi: 10.1016/j.trc.2020.102649 [12] KE Ze-mian, LI Zhi-bin, CAO Ze-hong, et al. Enhancing transferability of deep reinforcement learning-based variable speed limit control using transfer learning[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(7): 4684-4695. doi: 10.1109/TITS.2020.2990598 [13] TALEBPOUR A, MAHMASSANI H S, HAMDAR S H. Speed harmonization: Evaluation of effectiveness under congested conditions[J]. Journal of the Transportation Research Board, 2013, 2391(1): 69-79. doi: 10.3141/2391-07 [14] YANG H, RAKHA H. Feedback control speed harmonization algorithm: methodology and preliminary testing[J]. Transportation Research Part C: Emerging Technologies, 2017, 81: 209-226. doi: 10.1016/j.trc.2017.06.002 [15] HAN Yu, WANG Meng, HE Zi-ang, et al. A linear Lagrangian model predictive controller of macro- and micro-variable speed limits to eliminate freeway jam waves[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103121. doi: 10.1016/j.trc.2021.103121 [16] RAADSEN M P H, BLIEMER M C J. Variable speed limits in the link transmission model using an information propagation method[J]. Transportation Research Part C: Emerging Technologies, 2021, 129: 103184. doi: 10.1016/j.trc.2021.103184 [17] MALIKOPOULOS A A, HONG S, PARK B B, et al. Optimal control for speed harmonization of automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(7): 2405-2417. doi: 10.1109/TITS.2018.2865561 [18] HAN Y, CHEN Dan-jue, AHN S. Variable speed limit control at fixed freeway bottlenecks using connected vehicles[J]. Transportation Research Part B: Methodological, 2017, 98: 113-134. doi: 10.1016/j.trb.2016.12.013 [19] WANG Yi-bing, YU Xiang-hua, ZHANG Si-yu, et al. Freeway traffic control in presence of capacity drop[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1497-1516. doi: 10.1109/TITS.2020.2971663 [20] GHIASI A, LI Xiao-peng, MA Jia-qi. A mixed traffic speed harmonization model with connected autonomous vehicles[J]. Transportation Research Part C: Emerging Technologies, 2019, 104: 210-233. doi: 10.1016/j.trc.2019.05.005 [21] GOULET N, AYALEW B. Distributed maneuver planning with connected and automated vehicles for boosting traffic efficiency[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, DOI: 10.1109/TITS.2021.3096878. [22] RIOS-TORRES J, MALIKOPOULOS A A. Impact of partial penetrations of connected and automated vehicles on fuel consumption and traffic flow[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(4): 453-462. [23] ARD T, DOLLAR R A, VAHIDI A, et al. Microsimulation of energy and flow effects from optimal automated driving in mixed traffic[J]. Transportation Research Part C: Emerging Technologies, 2020, 120: 102806. doi: 10.1016/j.trc.2020.102806 [24] ČIČIĆ M, XIONG Xi, JIN Li, et al. Coordinating vehicle platoons for highway bottleneck decongestion and throughput improvement[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, DOI: 10.1109/TITS.2021.3088775. [25] ZU Yue, LIU Chen-hui, DAI Ran, et al. Real-time energy-efficient traffic controlvia convex optimization[J]. Transportation Research Part C: Emerging Technologies, 2018, 92: 119-136. doi: 10.1016/j.trc.2018.04.017 [26] LI Yong-fu, TANG Chuan-chong, LI Ke-zhi, et al. Consensus- based cooperative control for multi-platoon under the connected vehicles environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2220-2229. doi: 10.1109/TITS.2018.2865575 [27] JIA Dong-yao, NGODUY D. Platoon based cooperative driving model with consideration of realistic inter-vehicle communication[J]. Transportation Research Part C: Emerging Technologies, 2016, 68: 245-264. [28] ZHAO Hang, SUN Di-hua, ZHAO Min, et al. Combined longitudinal and lateral control for heterogeneous nodes in mixed vehicle platoon under V2I communication[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, DOI: 10.1109/TITS.2021.3061413. [29] 于晓海, 郭戈. 车队控制中的一种通用可变时距策略[J]. 自动化学报, 2019, 45(7): 1335-1343. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201907010.htmYU Xiao-hai, GUO Ge. A general variable time headway policy in platoon control[J]. Acta Automatica Sinica, 2019, 45(7): 1335-1343. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201907010.htm [30] JIANG Rui, WU Qing-song, ZHU Zuo-jin. Full velocity difference model for a car-following theory[J]. Physical Review E: Statistical, Nonlinear, and Soft Matter Physics, 2001, 64: 017101. -








 点击查看大图
点击查看大图
计量
- 文章访问数: 767
- HTML全文浏览量: 238
- PDF下载量: 124
- 被引次数: 0
