

Multi-scale filtering synchronization method for vehicle-infrastructure cooperative twin-simulation testing
-
摘要: 为提升车路协同孪生仿真测试系统的同步性能,明确了孪生主体的运行机理,分析了影响系统同步性能的干扰因素,建立了孪生状态同步映射模型; 针对孪生状态采样的时钟异步问题,设计了时钟误差估计策略,修正了孪生仿真测试系统的量测时间偏差; 在此基础上,结合卡尔曼滤波原理,引入多尺度滤波器更新机制,建立了考虑同步采样误差的量测噪声模型,提出了多尺度滤波同步优化方法; 最后,在搭建的孪生仿真测试原型系统中,选取NGSIM数据集的车辆轨迹开展试验。研究结果表明:在不同车辆速度条件下,提出的多尺度滤波同步优化方法能够保持良好的同步性能; 在横向坐标同步方面,平均绝对误差小于1 mm,99.5%的绝对误差控制在8 mm以内; 在纵向坐标同步方面,平均绝对误差小于9 mm,99.5%的绝对误差控制在38 mm以内; 在速度同步方面,平均绝对误差小于2.8 cm·s-1,99.5%的绝对误差控制在24 cm·s-1以内; 在偏航角同步方面,平均绝对误差小于1.1×10-3 rad,99.5%的绝对误差控制在1.1×10-2 rad以内; 与航迹推算方法相比,提出的方法能够在横向坐标、纵向坐标、速度和偏航角方面平均提升30.0%的同步精度,能够有效解决孪生主体的状态异步问题,可保障车路协同孪生仿真测试系统的实时同步与精准运行。Abstract: To enhance the synchronization performance of the vehicle-infrastructure cooperative twin-simulation testing system, the operation mechanism of twin objects was clarified. Then the interference factors affecting the synchronization performance of the system were analyzed to establish the synchronous mapping model for the twin state. In view of the asynchronous clock problem in twin state sampling, a clock error estimation strategy was designed to correct the measurement time deviation of the twin-simulation testing system. On this basis, a multi-scale filtering updating mechanism was introduced by combining the principle of the Kalman filtering. Furthermore, a measurement noise model considering the synchronization sampling errors was established, and the multi-scale filtering synchronization optimization method was proposed. Finally, the vehicle trajectories from the NGSIM dataset were selected to carry out experiments in a constructed prototype system of twin-simulation testing. Research results show that the synchronization performance can be well maintained by the proposed multi-scale filtering synchronization optimization method under different vehicle speeds. In terms of synchronizing the lateral coordinate, the mean absolute error (MAE) is less than 1 mm, and 99.5% of absolute error (AE) can be controlled to within 8 mm. In terms of synchronizing the longitudinal coordinate, the MAE is less than 9 mm, and 99.5% of AE can be controlled to within 38 mm. In terms of synchronizing the speed, the MAE is less than 2.8 cm·s-1, and 99.5% of AE can be controlled to within 24 cm·s-1. In terms of synchronizing the yaw angle, the MAE is less than 1.1×10-3 rad, and 99.5% of AE can be controlled to within 1.1×10-2 rad. Compared with the dead reckoning method, the proposed method can improve the synchronization accuracy by an average of 30.0% in terms of lateral coordinate, longitudinal coordinate, speed, and yaw angle, solve the asynchronous state problem for twin objects effectively, and guarantee the real-time synchronization and accurate operation of the vehicle-infrastructure cooperative twin-simulation testing system. 3 tabs, 10 figs, 31 refs.
-

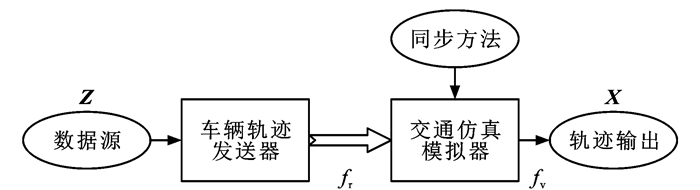
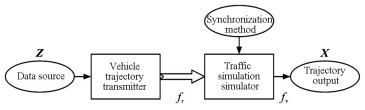
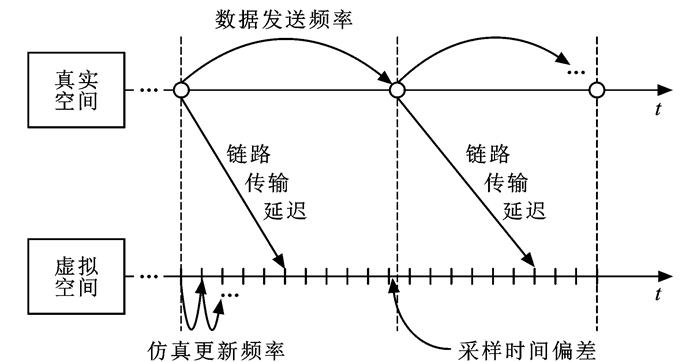
图 1 孪生仿真测试系统状态采集与传输机制
Figure 1. State collection and transmission mechanism in twin-simulation testing system

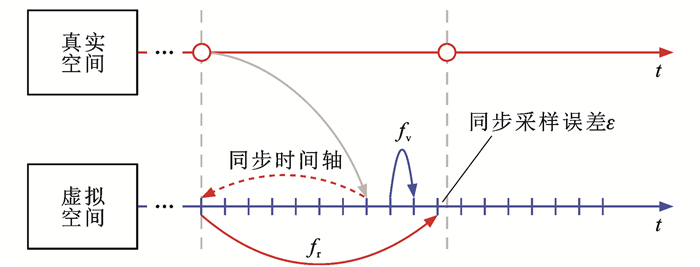
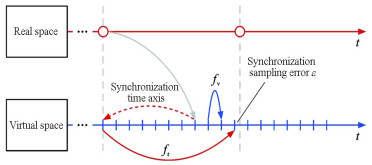
图 2 孪生仿真测试系统状态映射原理
Figure 2. Principle of state mapping in twin-simulation testing system

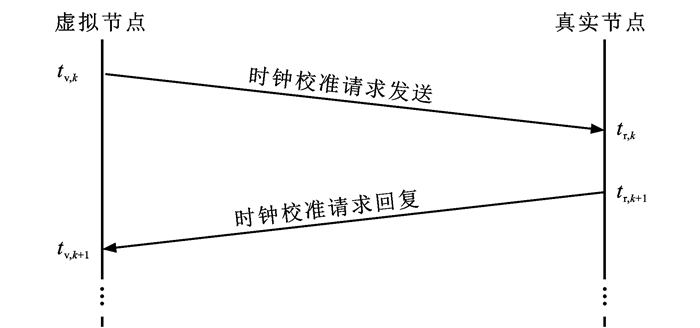
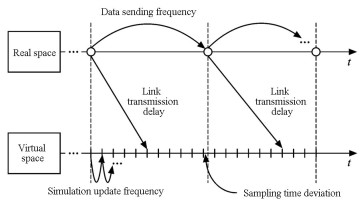
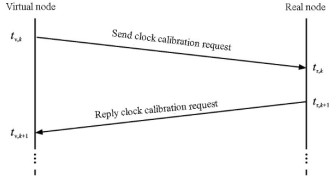
图 4 孪生仿真测试系统时钟采样流程
Figure 4. Clock sampling process in twins-simulation testing system

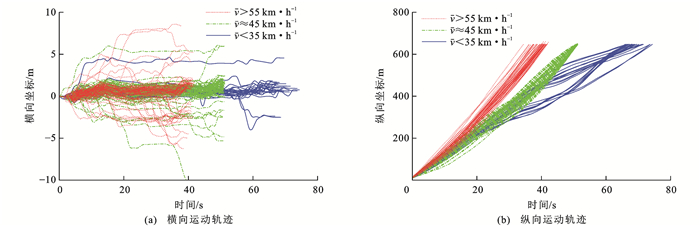
图 9 不同平均速度的车辆轨迹分布
Figure 9. Distributions of vehicle trajectories with different average speeds

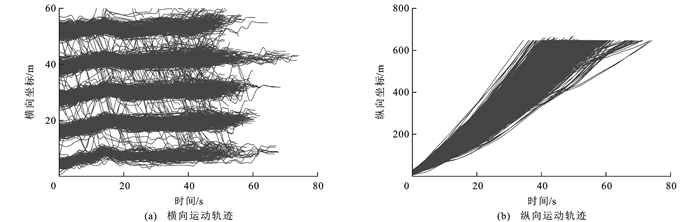
图 10 对比试验的车辆轨迹分布
Figure 10. Distributions of vehicle trajectories in comparative experiment
表 1 同步方法参数配置
Table 1. Parameters configuration of synchronization method
参数 取值 σ (8.8 m·s-2, 0.1 rad·s-2, 0.5 m·s-2, 1.0 rad·s-2) κQ (1.0, 1.0, 1.0×10-4, 0.2, 1.0, 1.0) κR (1.0, 1.0, 1.0, 1.0) fv/s-1 100 fr/s-1 10  下载: 导出CSV
下载: 导出CSV
表 2 不同速度条件下的同步误差统计结果
Table 2. Statistical results of synchronization errors under different speeds conditions
性能指标 S1 S2 S3 平均绝对误差 A1/mm 0.88 0.84 0.89 A2/mm 5.15 6.43 8.27 A3/(cm·s-1) 2.20 2.45 2.75 A4/10-3 rad 1.07 0.88 0.93 均方根误差 R1/mm 1.67 1.76 1.37 R2/mm 8.28 9.74 11.88 R3/(cm·s-1) 5.50 5.29 6.43 R4/10-3 rad 2.18 1.54 1.50 单侧置信区间 C1/mm 7.81 6.36 5.67 C2/mm 27.63 33.57 37.58 C3/(cm·s-1) 16.80 20.96 23.93 C4/10-3 rad 10.13 7.19 6.58
下载: 导出CSV
表 3 不同优化方法的同步误差统计结果
Table 3. Statistical results of synchronization errors using different optimization methods
性能指标 方法1 方法2 方法3 平均绝对误差 A1/mm 4.08 9.93 0.85 A2/mm 8.41 755.93 7.42 A3/(cm·s-1) 2.88 4.84 2.18 A4/10-3 rad 0.97 1.57 0.92 均方根误差 R1/mm 8.44 19.05 1.37 R2/mm 11.52 990.76 10.14 R3/(cm·s-1) 4.50 7.95 3.43 R4/10-3 rad 1.65 2.82 1.53 单侧置信区间 C1/mm 46.77 99.51 5.87 C2/mm 38.76 2771.49 31.24 C3/(cm·s-1) 18.93 34.76 14.96 C4/10-3 rad 7.87 13.94 6.92
下载: 导出CSV
1. Parameters configuration of synchronization method

2. Statistical results of synchronization errors under different speeds conditions

3. Statistical results of synchronization errors using different optimization methods

-
[1] 王云鹏, 鲁光泉, 于海洋. 车路协同环境下的交通工程[J]. 中国工程科学, 2018, 20(2): 106-110. https://www.cnki.com.cn/Article/CJFDTOTAL-GCKX201802017.htmWANG Yun-peng, LU Guang-quan, YU Hai-yang. Traffic engineering considering cooperative vehicle infrastructure system[J]. Engineering Science, 2018, 20(2): 106-110. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GCKX201802017.htm [2] 伍毅平, 李海舰, 赵晓华, 等. 车路协同雾天预警系统对车辆运行生态特性的影响[J]. 交通运输工程学报, 2021, 21(4): 259-268. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202104023.htmWU Yi-ping, LI Hai-jian, ZHAO Xiao-hua, et al. Effect of fog weather warning system under cooperative vehicle infrastructure on vehicle operating eco-characteristics[J]. Journal of Traffic and Transportation Engineering, 2021, 21(4): 259-268. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202104023.htm [3] 唐立, 卿三东, 徐志刚, 等. 自动驾驶公众接受度研究综述[J]. 交通运输工程学报, 2020, 20(2): 131-146. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202002011.htmTANG Li, QING San-dong, XU Zhi-gang, et al. Research review on public acceptance of autonomous driving[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 131-146. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202002011.htm [4] 范志翔, 孙巍, 潘汉中, 等. 自动驾驶汽车测试技术发展现状与思考[J]. 中国标准化, 2017(20): 47-48, 55. doi: 10.3969/j.issn.1002-5944.2017.20.037FAN Zhi-xiang, SUN Wei, PAN Han-zhong, et al. Current situations and considerations of automated vehicle testing technology[J]. China Standardization, 2017(20): 47-48, 55. (in Chinese) doi: 10.3969/j.issn.1002-5944.2017.20.037 [5] 余卓平, 邢星宇, 陈君毅. 自动驾驶汽车测试技术与应用进展[J]. 同济大学学报(自然科学版), 2019, 47(4): 540-547. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201904013.htmYU Zhuo-ping, XING Xing-yu, CHEN Jun-yi. Review on automated vehicle testing technology and its application[J]. Journal of Tongji University (Natural Science), 2019, 47(4): 540-547. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201904013.htm [6] 徐志刚, 李金龙, 赵祥模, 等. 智能公路发展现状与关键技术[J]. 中国公路学报, 2019, 32(8): 1-24. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201908002.htmXU Zhi-gang, LI Jin-long, ZHAO Xiang-mo, et al. A review on intelligent road and its related key technologies[J]. China Journal of Highway and Transport, 2019, 32(8): 1-24. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201908002.htm [7] BRUNELLI L, CAPANCIONI A, GONNELLA P, et al. A hybrid vehicle hardware-in-the-loop system with integrated connectivity for ehorizon functions validation[J]. IEEE Transactions on Vehicular Technology, 2021, 70(5): 4340-4352. doi: 10.1109/TVT.2021.3073807 [8] TUEGELE J, INGRAFFEA A R, EASON T G, et al. Reengineering aircraft structural life prediction using a digital twin[J]. International Journal of Aerospace Engineering, 2011, 2011: 154798. [9] SEMERAROC, LEZOCHE M, PANETTO H, et al. Digital twin paradigm: a systematic literature review[J]. Computers in Industry, 2021, 130: 1-23. [10] 宋学官, 来孝楠, 何西旺, 等. 重大装备形性一体化数字孪生关键技术[J]. 机械工程学报, 2022, 58(10): 298-325. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB202210028.htmSONG Xue-guan, LAI Xiao-nan, HE Xi-wang, et al. Key technologies of shape-performance integrated digital twin for major equipment[J]. Journal of Mechanical Engineering, 2022, 58(10): 298-325. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB202210028.htm [11] 缪炳荣, 张卫华, 刘建新, 等. 工业4.0下智能铁路前沿技术问题综述[J]. 交通运输工程学报, 2021, 21(1): 115-131. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202101008.htmMIAO Bing-rong, ZHANG Wei-hua, LIU Jian-xin, et al. Review on frontier technical issues of intelligent railways under Industry 4.0[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 115-131. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202101008.htm [12] LU Yu-qian, LIU Chao, WANG K I, et al. Digital twin-driven smart manufacturing: connotation, reference model, applications and research issues[J]. Robotics and Computer-Integrated Manufacturing, 2020, 61: 101837. doi: 10.1016/j.rcim.2019.101837 [13] FENG Yi-heng, YU Chun-hui, XU Shao-bing, et al. An augmented reality environment for connected and automated vehicle testing and evaluation[C]//IEEE. 2018 Intelligent Vehicles Symposium. New York: IEEE, 2018: 1549-1554. [14] ZHENG Han-ying, TANG Xue-yan. Analysis of server provisioning for distributed interactive applications[J]. IEEE Transactions on Computers, 2015, 64(10): 2752-2766. doi: 10.1109/TC.2014.2378252 [15] 张彤, 任丰原, 舒然. 基于分布式优化的数据中心网络混流调度机制[J]. 清华大学学报(自然科学版), 2021, 61(6): 618-625. https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB202106016.htmZHANG Tong, REN Feng-yuan, SHU Ran. Distributed-optimization-based mix-flow scheduling mechanism for data center networks[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(6): 618-625. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB202106016.htm [16] 田彬, 赵祥模, 徐志刚, 等. 车路协同条件下智能网联高速公路通行效率信息自适应分发协议: NRT-V2X[J]. 中国公路学报, 2019, 32(6): 293-307. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906030.htmTIAN Bin, ZHAO Xiang-mo, XU Zhi-gang, et al. NRT-V2X: adaptive data dissemination protocol for traffic efficiency of connected and automated highways[J]. China Journal of Highway and Transport, 2019, 32(6): 293-307. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906030.htm [17] BOCCA M, ERIKSSON L M, MAHMOOD A, et al. A synchronized wireless sensor network for experimental modal analysis in structural health monitoring[J]. Computer-Aided Civil and Infrastructure Engineering, 2011, 26(7): 483-499. doi: 10.1111/j.1467-8667.2011.00718.x [18] 王頲, 白桦, 唐晓铭, 等. 分布式全局精确时钟同步状态追踪: 能观测性观测器分析[J]. 电子学报, 2019, 47(9): 1855-1862. doi: 10.3969/j.issn.0372-2112.2019.09.006WANG Ting, BAI Hua, TANG Xiao-ming, et al. Distributed global precise clock synchronization state tracking: analysis of observable observer[J]. Acta Electronica Sinica, 2019, 47(9): 1855-1862. (in Chinese) doi: 10.3969/j.issn.0372-2112.2019.09.006 [19] 余世明, 周景远, 何德峰, 等. 随机有界通信时延下传感器网络中的一致性时钟同步算法[J]. 控制与决策, 2020, 35(5): 1159-1166. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202005015.htmYU Shi-ming, ZHOU Jing-yuan, HE De-feng, et al. Time synchronization based on consensus in WSN with random bounded communication delay[J]. Control and Decision, 2020, 35(5): 1159-1166. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202005015.htm [20] 张杨, 董士程. 面向并发程序中锁机制的智能化推荐方法[J]. 计算机应用, 2021, 41(6): 1597-1603. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY202106010.htmZHANG Yang, DONG Shi-cheng. Intelligent recommendation method for lock mechanism in concurrent program[J]. Journal of Computer Applications, 2021, 41(6): 1597-1603. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY202106010.htm [21] 朱涛, 郭进伟, 周欢, 等. 分布式数据库中一致性与可用性的关系[J]. 软件学报, 2018, 29(1): 131-149. https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB201801007.htmZHU Tao, GUO Jin-wei, ZHOU Huan, et al. Consistency and availability in distributed database systems[J]. Journal of Software, 2018, 29(1): 131-149. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB201801007.htm [22] VEGAM T, MEHMLI T, VAN DER HOOFT J, et al. Enabling virtual reality for the tactile internet: hurdles and opportunities[C]//IEEE. 14th International Conference on Network and Service Management (CNSM). New York: IEEE, 2018: 378-383. [23] LIN K C, SCHAB D E. The performance assessment of the dead reckoning algorithms in DIS[J]. Simulation, 1994, 63(5): 318-325. doi: 10.1177/003754979406300507 [24] FUNGY S, LUI J C S. Hack-proof synchronization protocol for multi-player online games[J]. Multimedia Tools and Applications, 2009, 41(2): 305-331. doi: 10.1007/s11042-008-0230-3 [25] MONDOLONIS, ROZEN N. Aircraft trajectory prediction and synchronization for air traffic management applications[J]. Progress in Aerospace Sciences, 2020, 119: 100640. doi: 10.1016/j.paerosci.2020.100640 [26] GÖRÜR B K, İMRE K M, OǦUZTÜZÜN H, et al. Predetermined rollbacks: an extension to time warp for spatially parallel agent-based simulation[J]. Simulation Modelling Practice and Theory, 2019, 95: 60-77. doi: 10.1016/j.simpat.2019.04.008 [27] CHEN You-fu, LIU E S. Comparing dead reckoning algorithms for distributed car simulations[C]//ACM. 32nd SIGSIM Conference on Principles of Advanced Discrete Simulation. New York: ACM, 2018: 105-111. [28] DIBERNARDO M D, SALVI A, STEFANI S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 102-112. doi: 10.1109/TITS.2014.2328439 [29] 梁华刚, 程加乐, 孙小喃, 等. 道路监控系统中非同步相机时间校正方法[J]. 交通运输工程学报, 2015, 15(4): 118-126. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201504017.htmLIANG Hua-gang, CHENG Jia-le, SUN Xiao-nan, et al. Time correction method of asynchronous cameras in road monitoring system[J]. Journal of Traffic and Transportation Engineering, 2015, 15(4): 118-126. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201504017.htm [30] QIU Wei-zhi, SHANGGUAN Wei, CHAI Lin-guo, et al. Parallel hierarchical control-based efficiency enhancement for large-scale virtual reality traffic simulation[J]. IEEE Intelligent Transportation Systems Magazine, 2021, 14(4): 145-162. [31] 惠阳, 王永岗, 彭辉, 等. 基于优化PSO-BP算法的耦合时空特征下地铁客流预测[J]. 交通运输工程学报, 2021, 21(4): 210-222. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202104019.htmHUI Yang, WANG Yong-gang, PENG Hui, et al. Subway passenger flow prediction based on optimized PSO-BP algorithm with coupled spatial-temporal characteristics[J]. Journal of Traffic and Transportation Engineering, 2021, 21(4): 210-222. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202104019.htm -








 点击查看大图
点击查看大图
计量
- 文章访问数: 719
- HTML全文浏览量: 231
- PDF下载量: 68
- 被引次数: 0
