

The Optimal Offsets Pattern and Development of Simulation in Signals Control System on Urban Main Road
Article Text (Baidu Translation)
-
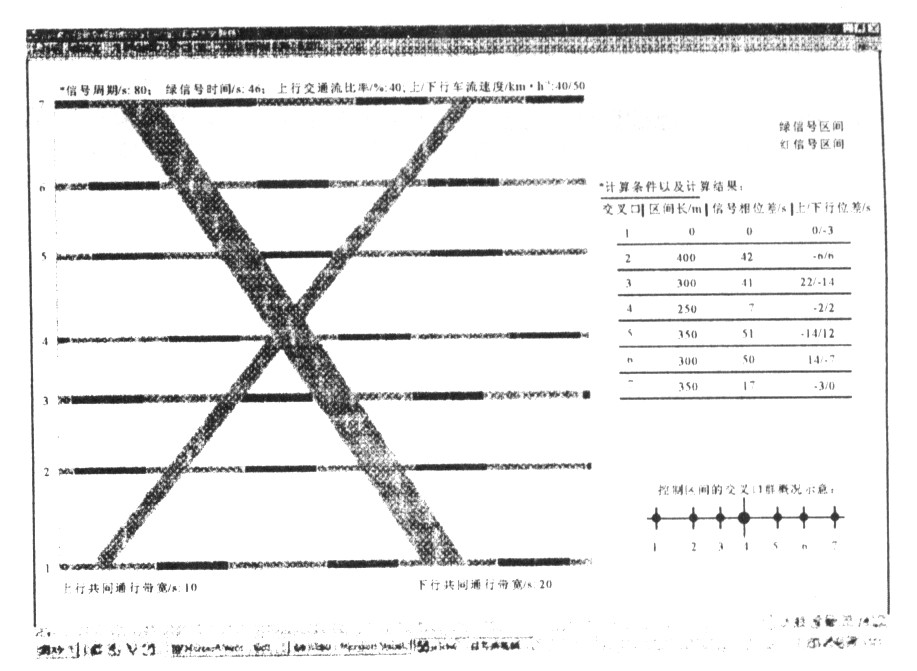
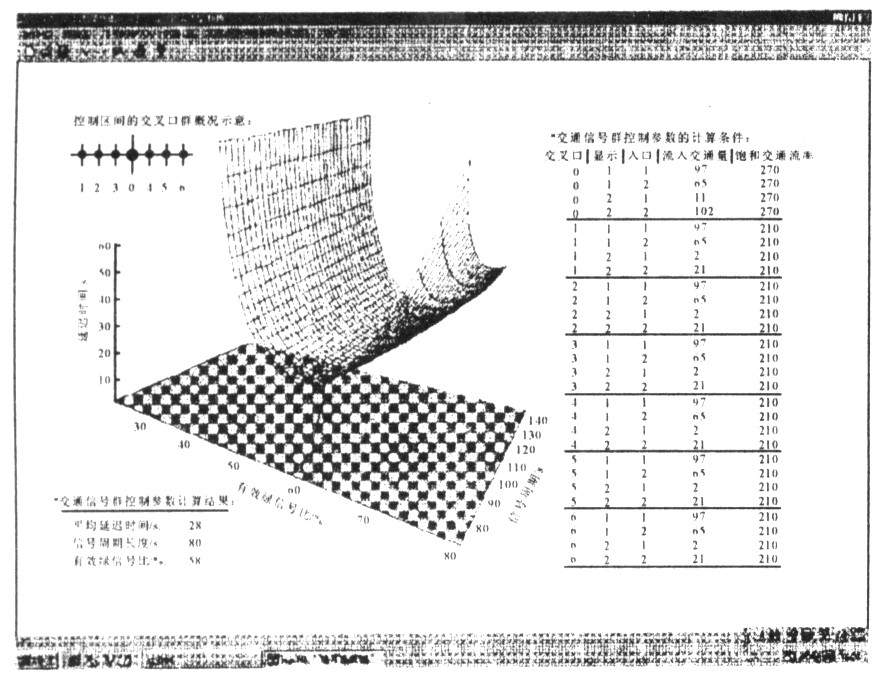
摘要: 在引入交叉口信号状态位差概念基础上, 提出交通信号系统控制的比例信号相位差设计方案, 并在HCM信号延迟计算式的基础上整理出规范化的信号周期及有效绿信号比优化设计模型, 从而构成一套完整的城市主干道交通信号群系统控制参数优化设计模式。采用VC++程序设计语言编制了具有较好可视性的模拟系统软件, 并用此系统软件进行了模拟实验, 验证了控制参数优化设计模式的正确性Abstract: Based on the concept of the state position differences of traffic signals at the intersections, the designing plan and model in signals control system are presented. A comprehensive pattern in the traffic signals control system on the urban main road is developed. The VC++ programming language is utilized to develop visual simulation software. The simulation experiments are carried out to validate the correct of the control parameters.
-
[1] [日本]饭田恭敬. 交通工学[M]. 国民科学社, 1992. 245-252. [2] MORGAN J T, LITTLE J D C. Synchronizing traffic signals for maximal bandwidth[J]. Opns Res., 1964, 12(6): 896-910. [3] TRB. HIGHWAY CAPACITY MANUAL[R]. Special Report 209, 1985.21-27. [4] WEBSTER F V. Traffic signal settings[R]. Road Res. Tech. Paper, No 39, Road Research Laboratory, London, 1958.57-60. [5] 织田, 等. 信号制御パラメ一タ最适化に门关すゐ考察[A]. 第13回交通工学研究发表会论文集[C]. 1993, 11.113-116. [6] 织田, 等. 都市街路网におけゐ系统交通信号制御最适化に门关すゐ研究[J]. システム制御情报学会论文言志. 1998, 11(7): 8-17. -

 下载:
下载:

 点击查看大图
点击查看大图
图(3)
计量
- 文章访问数: 294
- HTML全文浏览量: 139
- PDF下载量: 172
- 被引次数: 0
