

The Simulation Analysis and Test Research on the Braking Vibration Process of the Tractor-trailer Combinations
Article Text (Baidu Translation)
-
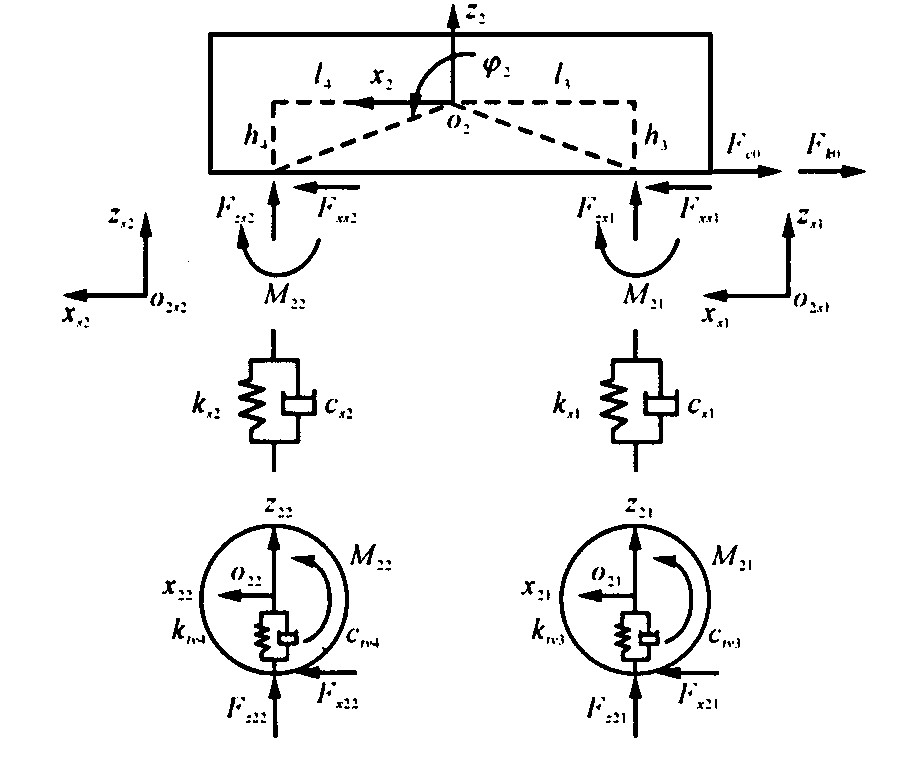
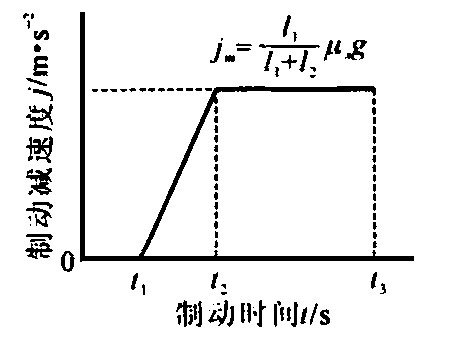
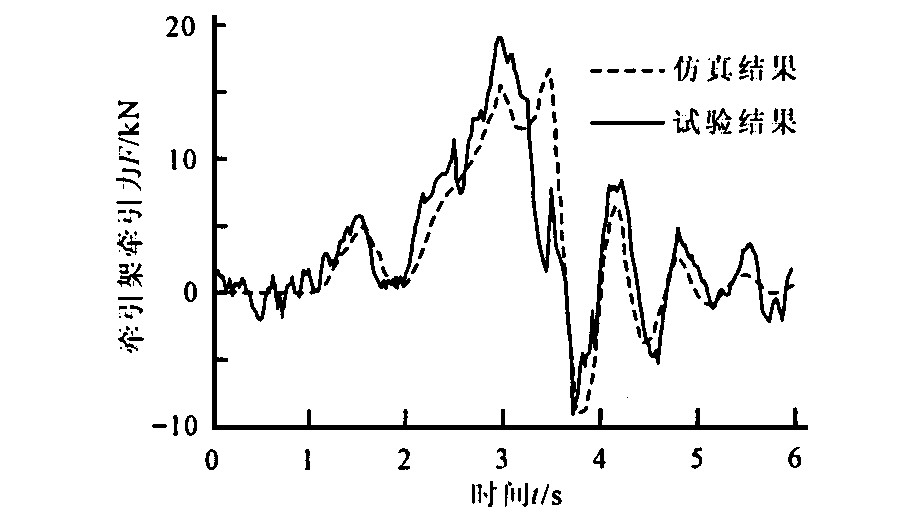
摘要: 对全挂车辆在平坦路面上的制动过程进行了动力学分析, 确定了全挂车辆制动时振动的激励因素, 应用Wilson-θ逐步积分法并通过MATLAB语言编程进行了全挂车辆制动过程的仿真计算, 仿真分析结果与试验结果相吻合Abstract: The dynamic analysis for the braking process of the tractor trailer combinations running on the even road is performed.The stimulation factors during the braking vibration process are settled.The corresponding simulation analysis using the Wilson θ step by step integral method by means of MATLAB language is developed.The theoretical results are in acceptable agreement with the experimental data.
-
Key words:
- tractor trailer combinations /
- simulation analysis /
- braking tests
-
[1] 高举成. 挂接车辆的柔性牵引及其平顺性研究[D]. 长春: 吉林大学, 2000. [2] 余志生. 汽车理论(第二版)[M]. 北京: 机械工业出版社, 1989. [3] 左曙光. 路面不平度对拖拉机-挂车机组制动性能的影响——建模与仿真分析[D]. 长春: 吉林大学, 1996. [4] 陈塑寰. 结构振动分析的数值方法[M]. 长春: 吉林科学技术出版社, 1996. -

 下载:
下载:


 点击查看大图
点击查看大图

图(6)
计量
- 文章访问数: 298
- HTML全文浏览量: 137
- PDF下载量: 202
- 被引次数: 0
