

Output feedback robust control algorithm applied to ship steering autopilot with uncertain nonlinear system
Article Text (Baidu Translation)
-
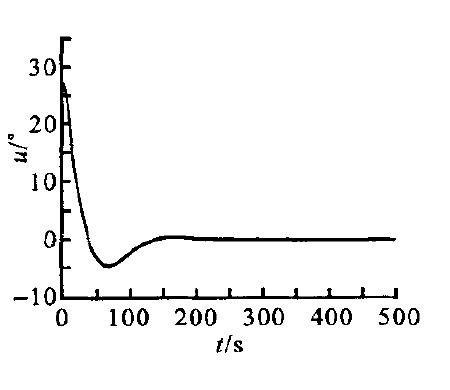
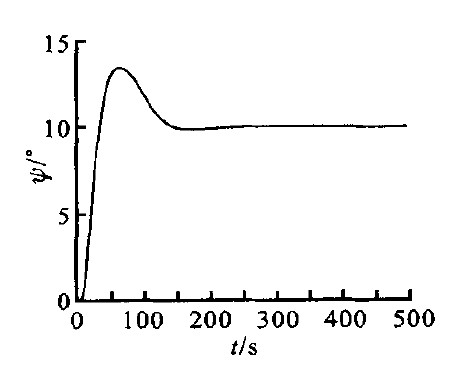
摘要: 考虑船舶航向控制系统模型中存在非线性, 假设模型参数和外界干扰有界的情况下, 首先利用Lyapunov稳定性理论, 提出了一种状态反馈鲁棒控制新算法的自动舵设计, 进而考虑到实际船舶上, 在进行航向控制时, 并不是所有船舶运动状态都是可测的, 仅有航向是可测的, 采用一种高增益状态观测器对状态进行重构, 提出了输出反馈鲁棒控制自动舵设计。以大连海事大学远洋实习船“育龙轮”为例, 进行了输出反馈鲁棒控制自动舵设计, 并利用Matlab工具箱进行了仿真研究, 结果证明该算法是十分有效的Abstract: A state feedback robust control algorithm is presented for ship steering autopilot with uncertain nonlinear system based on known parameter bound of the system and known bound of input disturbance by use of the theory of Lyapunov stability. Owing to not all states of ship motion being achieved and only ship course can be measured on board, so a high gain observer is proposed to estimate the states of ship motion and then a output feedback robust control algorithm is developed. An example illustrating the method described is included for ocean going training ship. It is shown that the controller can make the designed system guarantees the satisfied performance by simulation based on the Matlab Simulink package.
-
Key words:
- nonlinear system /
- output feedback control /
- robust control /
- ship autopilot
-
[1] AMERONGEN JV. Adaptives teering of ships-amodel reference approach[J]. Automatica, 1984, 20(1): 3-14. doi: 10.1016/0005-1098(84)90060-8 [2] KALLSTROM C G. Adaptive autopilots for tankers [J]. Automatica, 1979, 15(2): 241-254. [3] YANG Y S. Neural network adaptive control for ship automatic steering[A]. International Symposium of Young Investigators on Information, Computer and Control[C]. Beijing: Automatic Institution of Chinese Acaderny of Sciences, 1994.231-236. [4] LAYNE J R. Fuzzy model reference learning control for cargo ship steering[J]. IEEE Trans. Control Syst. Mag, 1993, 13(1): 23-34. [5] NOMOTO K. On the steering quality of ships[J]. International Shipbuilding Progress, 1957, 35 (5): 354-370. [6] YANG Yan-sheng. Robust control for uncertain systems and its applications to ship motion control[D]. Dalian: Dalian Maritime University, 2000. [7] YANG Y S. Study on ship manoeuvring mathematical model in shiphandling simulator[A]. MARSIM'96 [C]. Rotterdam: A. A. Balkema Publishers, 1996. 607-615. -

 下载:
下载:


 点击查看大图
点击查看大图
图(4)
计量
- 文章访问数: 414
- HTML全文浏览量: 148
- PDF下载量: 390
- 被引次数: 0
