

Synthetical evaluation of large ship maneuverability
Article Text (Baidu Translation)
-
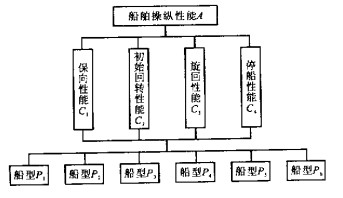
摘要: 选取6种典型的大型船舶操纵性能试验数据,分析其影响因素,并运用IMO有关船舶操纵性的衡准,确定综合评价指标,运用层次分析法对其操纵性能进行排序,然后对大型油船、散货船和集装箱船的操纵性能进行比较,总结出大型船舶的操纵特点,并得出对实际船舶操纵具有指导意义的结论。Abstract: The maneuvering test data of6 model large ships was selected and its influencing factors were analyzed.Besides, IMO ship maneuverability criteria was used for establishing evaluation indices, then the Analytical Hierarchy Process(AHP)was applied for ranking the ship maneuverability.The maneuverability ofVLCC was compared with the ones oflarge bulk carrier and large container ship, the characters of large ship's maneuverability was obtained.
-
Key words:
- ship /
- oil tanker /
- container ship /
- bulk carrier /
- maneuverability /
- AHP (Analytical
-
表 1 船舶操纵性资料
Table 1. Data of ship maneuverability

表 2 1~9阶矩阵的平均一致性指标
Table 2. The average consistence indices of1 to9 ranks matrixes

表 3 层次总排序结果
Table 3. The results of overall hierarchy ranking

-
[1] JIANG Hua, GAO Guo-an, LIU Dong-liang. Design and implement of multicriteria, multiobjective decision evaluation system[J]. Journal of System Engineering, 1999, 14(3): 296-300. [2] 谭跃进, 陈英武, 等. 系统工程原理[M]. 长沙: 国防科技大学出版社, 1999.64-84. [3] 吴秀恒. 船舶操纵性与耐波性[M]. 北京: 人民交通出版社, 1999.56-57. [4] 日本海难防止协会. 超大型船操船の手引き[M]. 日本: 成山堂书店, 1972. -

 下载:
下载:
 点击查看大图
点击查看大图
图(1) / 表(3)
计量
- 文章访问数: 412
- HTML全文浏览量: 112
- PDF下载量: 211
- 被引次数: 0
