

Application of preview follower theory and driver model in the research of vehicle intelligent handling
Article Text (Baidu Translation)
-
摘要: 根据预瞄跟随理论及驾驶员的开车行为特性, 指出汽车智能驾驶与驾驶员操纵行为的内在一致性——汽车智能驾驶系统的控制特性与熟练驾驶员的驾驶行为特性基本一致。结合驾驶员操纵行为模式将汽车智能驾驶系统划分为信息感知、轨迹决策和操纵控制三个部分, 并一一加以具体分析, 利用系统模糊决策理论对几种汽车行驶的典型工况进行了智能车辆方向控制仿真计算。理论分析和仿真结果表明预瞄跟随理论为智能车辆的研究提供了一个可行的研究途径, 按照该理论建立的驾驶员方向控制模型可以直接应用于智能车辆控制算法的研究开发Abstract: Based on the preview follower theory and driver behavior characteristics, the internal coherence between vehicle intelligent handling system and driver handling behavior is indicated that the control characteristic of vehicle intelligent handling system is basically identical with skill driver handling behavoir.With the pattern of driver handling behavior, vehicle intelligent handling system is divided into three modules including information identification, course decision making and performance control, the modules are analyzed in detail, and the simulations of intelligent vehicle direction control are made under some typical road circumstances with system fuzzy decision making theory.Theoretical analysis and the sumulation results show preview follower theory can provide a applicable way to the research of intelligent vehicle, and the driver direction control model based on this theory can be directly used in the research of intelligent vehicle.
-
Key words:
- preview follower /
- driver /
- intelligent vehicle /
- direction /
- simulation
-

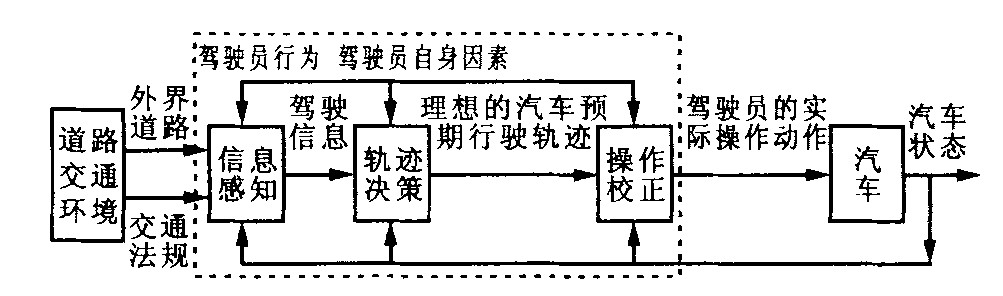
图 2 在驾驶员-汽车-道路闭环系统中的驾驶员操作行为
Figure 2. Driver behavior in driver-vehicle-road closed-loop syste

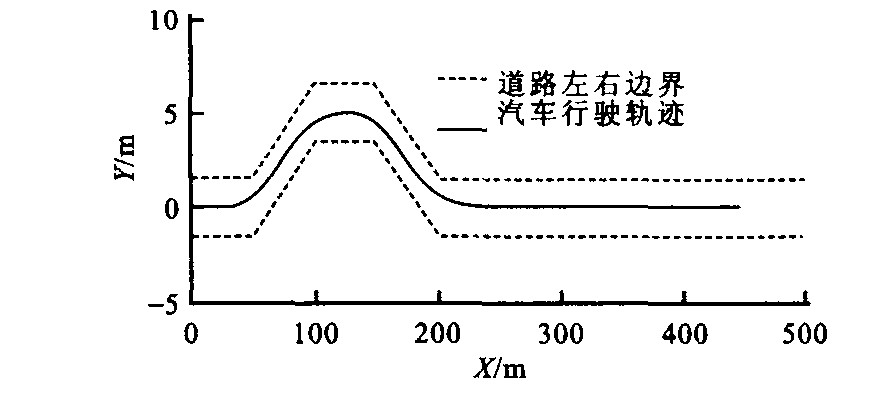
图 4 双移线工况仿真曲线(车速为80 km/h)
Figure 4. Double lane-change simulation (velocity is 80 km/h)
-
[1] 郭孔辉. 汽车操纵动力学[M]. 长春: 吉林科学技术出版社, 1991. [2] 管欣. 驾驶员方向控制模型及闭环驾驶安全性预测方法的研究[D]. 长春: 吉林大学, 1992. [3] 高振海. 驾驶员最优预瞄加速度模型的研究[D]. 长春: 吉林大学, 2000. [4] GAOZhen-hai, GUAN Hsin, GUOKong-hui. Driver directional control model and the application in the research of intelligent vehicle[J]. China Journal of Highway and Transport, 2000, 13(3). [5] 陈守煜. 工程模糊集理论与应用[M]. 北京: 国防工业出版社, 1998. [6] 庄继德. 汽车电子控制系统工程[M]. 北京: 北京理工大学出版社, 1998. -

 下载:
下载:
 点击查看大图
点击查看大图

图(5)
计量
- 文章访问数: 584
- HTML全文浏览量: 197
- PDF下载量: 901
- 被引次数: 0
