

-
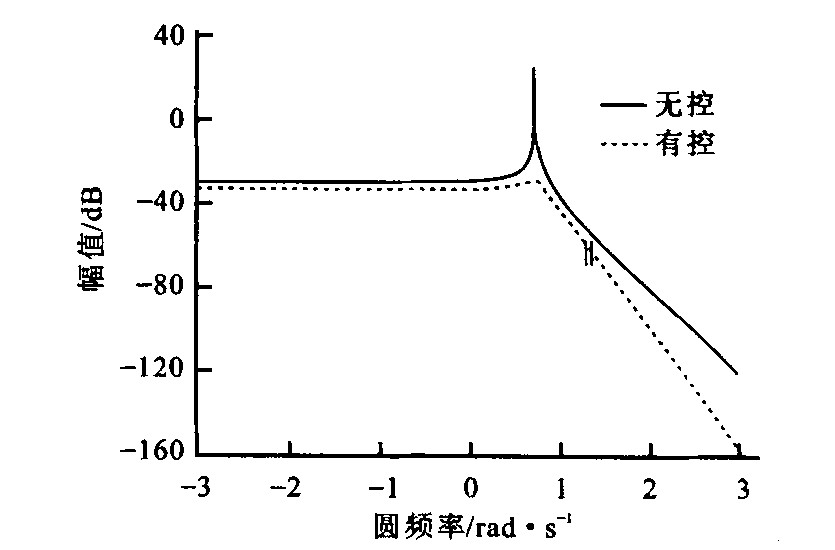
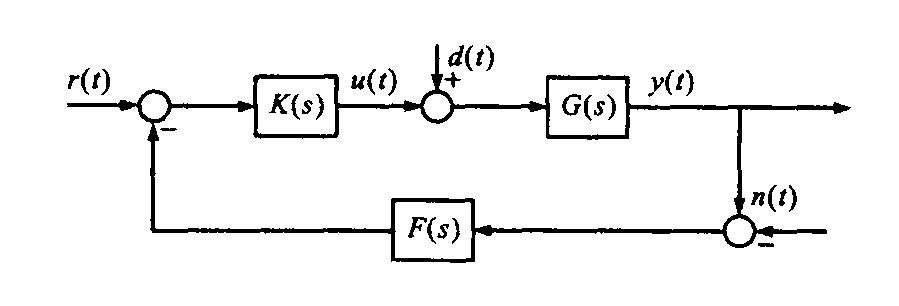
摘要: 简述了H∞鲁棒控制器的基本思想, 给出了运用MATLAB鲁棒控制工具箱为假定空间桁架设计H∞鲁棒控制器的设计过程, 同时也给出了控制器作用下闭环系统的分析结果, 设计所得到的控制器控制效果非常好, 达到了设计的目的。Abstract: The essential idea about H∞ robust control is presented.The design method of H∞ robust control for the space truss structure using MATLAB robust control toolbox is presented too.At the same time, an analysis result on the closed loop system with control is presented.The control effect is very good.
-
Key words:
- closed loop system /
- weighting function /
- robust control
-
[1] Zames G. Feedback and optimal sensitivity: Model reference transformations, multiplicative seminorms and approximate inverse[J]. IEEE Trans. AC, 1981, 26 (4): 301-320. [2] 刘红军. 电流变技术在结构振动控制中的应用[D]. 西安: 西北工业大学, 1999. [3] 薛定宇. 反馈控制系统设计与分析- MATLAB语言应用[M]. 北京: 清华大学出版社, 2000. [4] 张志涌. 精通MATLAB 5.3版[M]. 北京: 北京航空航天大学出版社, 2000. [5] 周雪琴, 张洪才. 控制工程导论[M]. 西安: 西北工业大学出版社, 1995. [6] 张阿舟, 姚起航. 振动控制工程[M]. 北京: 航空工业出版社, 1989. -

 下载:
下载:
 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 443
- HTML全文浏览量: 192
- PDF下载量: 1229
- 被引次数: 0
