

Algorithm of controller for lane-following based on basic road facilities
-
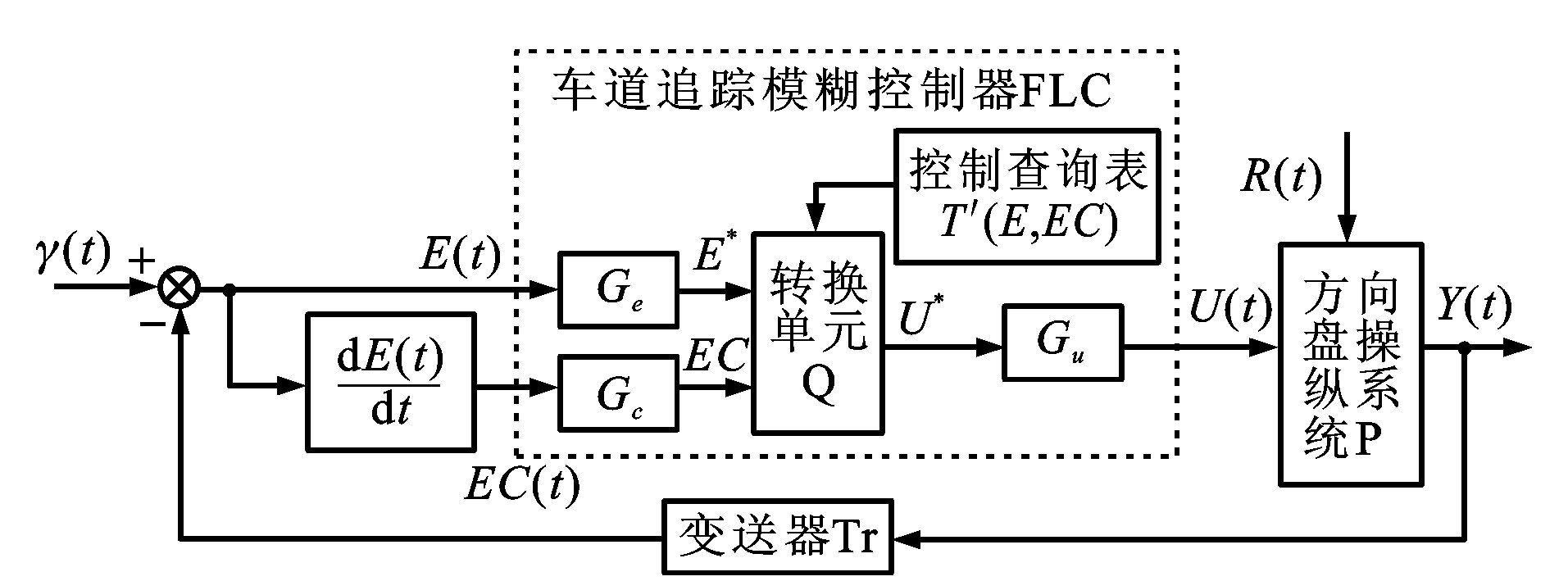
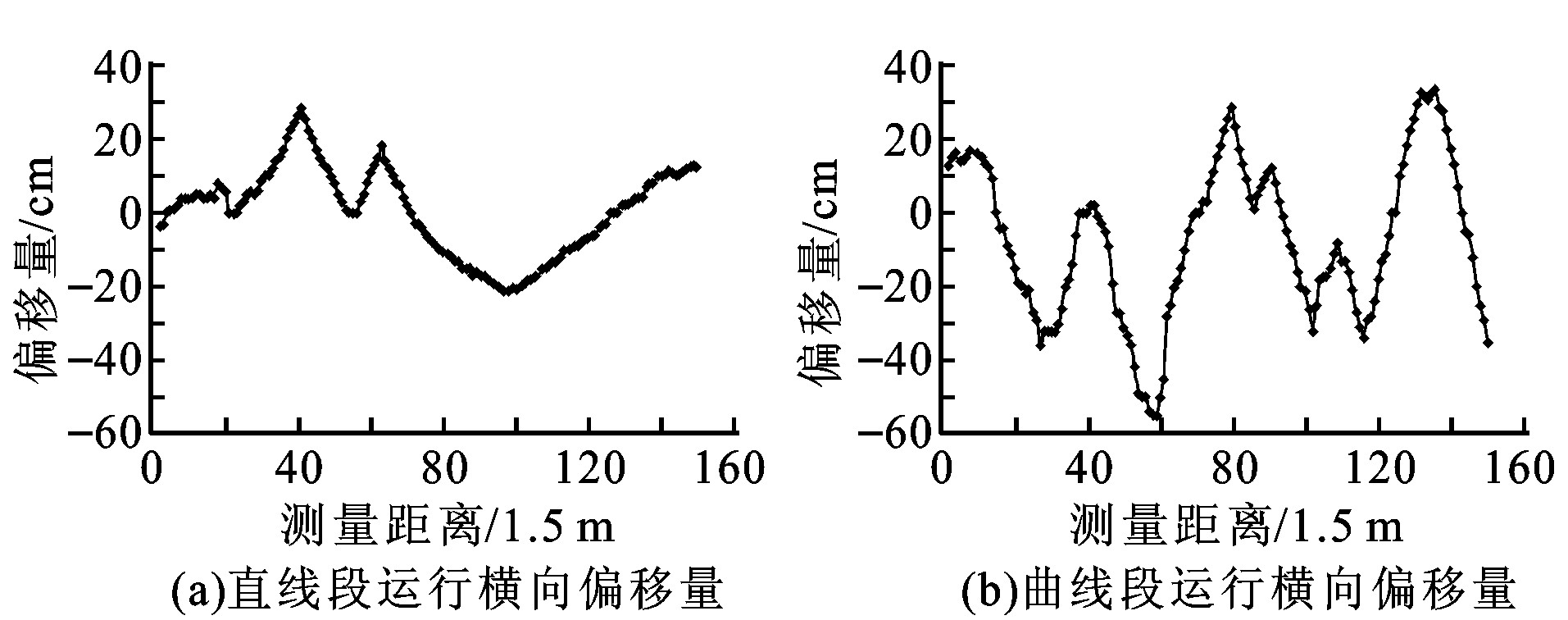
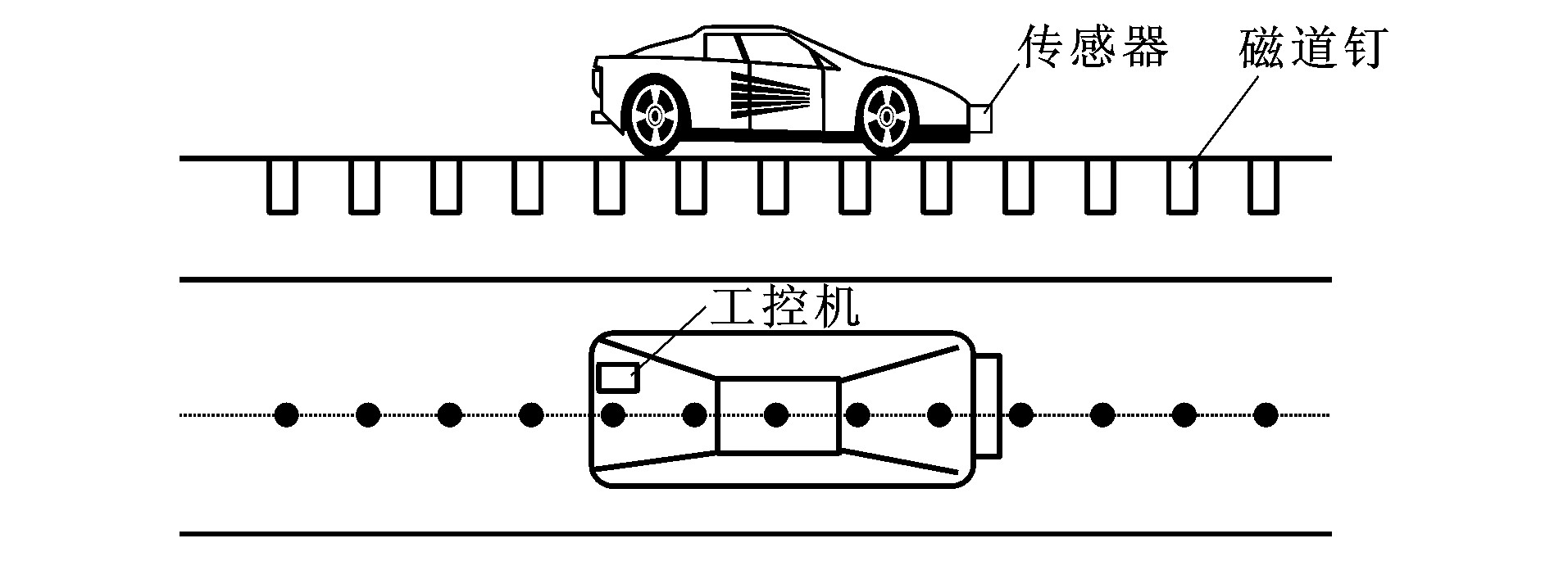
摘要: 基于道路基础设施而实现的车道追踪控制技术是当今智能公路领域的核心研究内容之一。2 0 0 1年6月研制的车道追踪控制器在交通部公路科学研究所公路交通综合试验场90 0 m的智能公路测试跑道上实现了车道自动追踪的控制任务, 并且控制结果达到并超过ISO/TC2 0 4 WG1 4标准化草案NP1 7361 LDWS对车道偏离预警系统的要求。分析了该控制器的结构, 推导了该控制器的解析表达式, 给出了该控制器的参数, 并对实验结果进行了分析Abstract: Lane following, based on basic road facilities, is one of the core research items in the field of intelligent highway system (IHS).In June 2001, the controller designed by authors finished the task of lane following on IHS testing course, and the testing result had reached/surpassed the requirement of NP17361 Lane Departure Warning System made by ISO/TC204 WGI4.This paper described the controller architecture, deduced its analytic formula, given its parameters, drawn the control error curves and analyzed the testing results.
-
Key words:
- intelligent highway system (IHS) /
- lane following /
- controller /
- algorithm
-

图 1 基于道路基础设施的车道追踪控制系统
Figure 1. Control system of lane-following based on basic road facilities
表 1 T (E, X) 语言变量E模糊子集隶属度
Table 1. T (E, X) fuzzy membership table for variableE
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 NB 1.0 0.8 0.4 0.1 0 0 0 0 0 0 0 0 0 NM 0.2 0.7 1.0 0.7 0.2 0 0 0 0 0 0 0 0 NS 0 0 0.2 0.6 1.0 0.8 0.2 0 0 0 0 0 0 ZO 0 0 0 0 0.1 0.6 1.0 0.6 0.1 0 0 0 0 PS 0 0 0 0 0 0 0.2 0.8 1.0 0.6 0.3 0 0 PM 0 0 0 0 0 0 0 0 0.2 0.7 1.0 0.7 0.2 PB 0 0 0 0 0 0 0 0 0 0.1 0.4 0.8 1.0  下载: 导出CSV
下载: 导出CSV
表 2 T (EC, Y) 误差变化率语言变量EC模糊子集隶属度
Table 2. T (EC, Y) fuzzy membership table for variableEC
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 NB 1.0 0.8 0.4 0.1 0 0 0 0 0 0 0 0 0 NM 0.2 0.7 1.0 0.7 0.2 0 0 0 0 0 0 0 0 NS 0 0 0.2 0.7 1.0 0.8 0.1 0 0 0 0 0 0 ZO 0 0 0 0 0 0.5 1.0 0.5 0 0 0 0 0 PS 0 0 0 0 0 0 0.1 0.8 1.0 0.7 0.2 0 0 PM 0 0 0 0 0 0 0 0 0.2 0.7 1.0 0.7 0.2 PB 0 0 0 0 0 0 0 0 0 0.1 0.4 0.8 1.0
下载: 导出CSV
表 3 T (U, Z) 控制量语言变量U模糊子集隶属度
Table 3. T (U, Z) fuzzy membership table for variableU
-7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 NB 1.0 0.8 0.4 0.1 0 0 0 0 0 0 0 0 0 0 0 NM 0 0.2 0.7 1.0 0.7 0.2 0 0 0 0 0 0 0 0 0 NS 0 0 0 0.1 0.4 0.8 1.0 0.8 0.4 0.1 0 0 0 0 0 ZO 0 0 0 0 0 0 0.5 1.0 0.5 0 0 0 0 0 0 PS 0 0 0 0 0 0 0.4 0.8 1.0 0.8 0.4 0.1 0 0 0 PM 0 0 0 0 0 0 0 0 0 0.2 0.7 1.0 0.7 0.2 0 PB 0 0 0 0 0 0 0 0 0 0 0 0.1 0.4 0.8 1.0
下载: 导出CSV
表 4 T (E, EC, U) 控制规则
Table 4. T (E, EC, U) control rules
E, U, EU NB NM NS ZO PS PM PB NB PB PB PM PM PS ZO ZO NM PB PB PM PM PS ZO ZO NS PB PB PM PS ZO NM NM ZO PB PB PM ZO NM NB NB PS PM PM ZO NS NM NB NB PM ZO ZO NS NM NM NB NB PB ZO ZO NS NM NM NB NB
下载: 导出CSV
表 5 T′ (E, EC, U) 模糊控制查询
Table 5. T′ (E, EC, U) Query table for fuzzy control
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 -6 7 7 7 7 4 4 4 2 1 0 0 0 0 -5 6 6 6 6 4 4 4 2 2 0 0 0 0 -4 7 6 7 7 4 4 4 2 1 0 0 0 0 -3 6 6 6 6 5 5 5 2 2 0 -2 -2 -2 -2 7 6 7 6 4 4 1 0 0 -3 -4 -4 -4 -1 7 6 7 6 4 4 1 0 -3 -3 -4 -4 -4 0 7 6 7 6 4 1 0 -1 -4 -6 -7 -6 -7 1 4 4 4 3 1 0 -1 -4 -4 -6 -7 -6 -7 2 4 4 4 2 0 0 -1 -4 -4 -6 -7 -6 -7 3 2 2 2 0 0 0 -1 -3 -3 -6 -6 -6 -6 4 0 0 0 -1 -1 -3 -4 -4 -4 -6 -7 -6 -7 5 0 0 0 -1 -1 -2 -4 -4 -4 -6 -6 -6 -6 6 0 0 0 -1 -1 -1 -4 -4 -4 -6 -7 -7 -7
下载: 导出CSV
-
[1] WANG Jeng-yu. Robust lateral control of heavy vehicles on automated highways, dissertation[D]. University of California, Berkeley, 2000. [2] Chen C, Tan H-S. Sterring control of high speed vehicle: dynamic look ahead and yaw rate feedback[A]. Proceedings of the 37th IEEE[C]. Conference on Decision Conirol, Tampa, Florida USA, 1998. [3] 何平, 王鸿绪. 模糊控制器的设计及应用[M]. 北京: 科学出版社, 1997. [4] Dimiter Driankov. Fuzzy Logic Techniques for Autonomous Vehicle Navigation[M]. Heidelberg, New York: Physica-Verlag, 2001. [5] HAO Ying. Fuzzy Control and Modeling: Analytical Foundations and Applications[M]. New York: IEEE Press, 2000. [6] 王勤, 蒋嗣荣. 计算机控制技术[M]. 南京: 东南大学出版社, 1997. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 340
- HTML全文浏览量: 104
- PDF下载量: 148
- 被引次数: 0
