

Sea bottom detection technique using multi-subarrays in swath bathymeter system
Article Text (Baidu Translation)
-
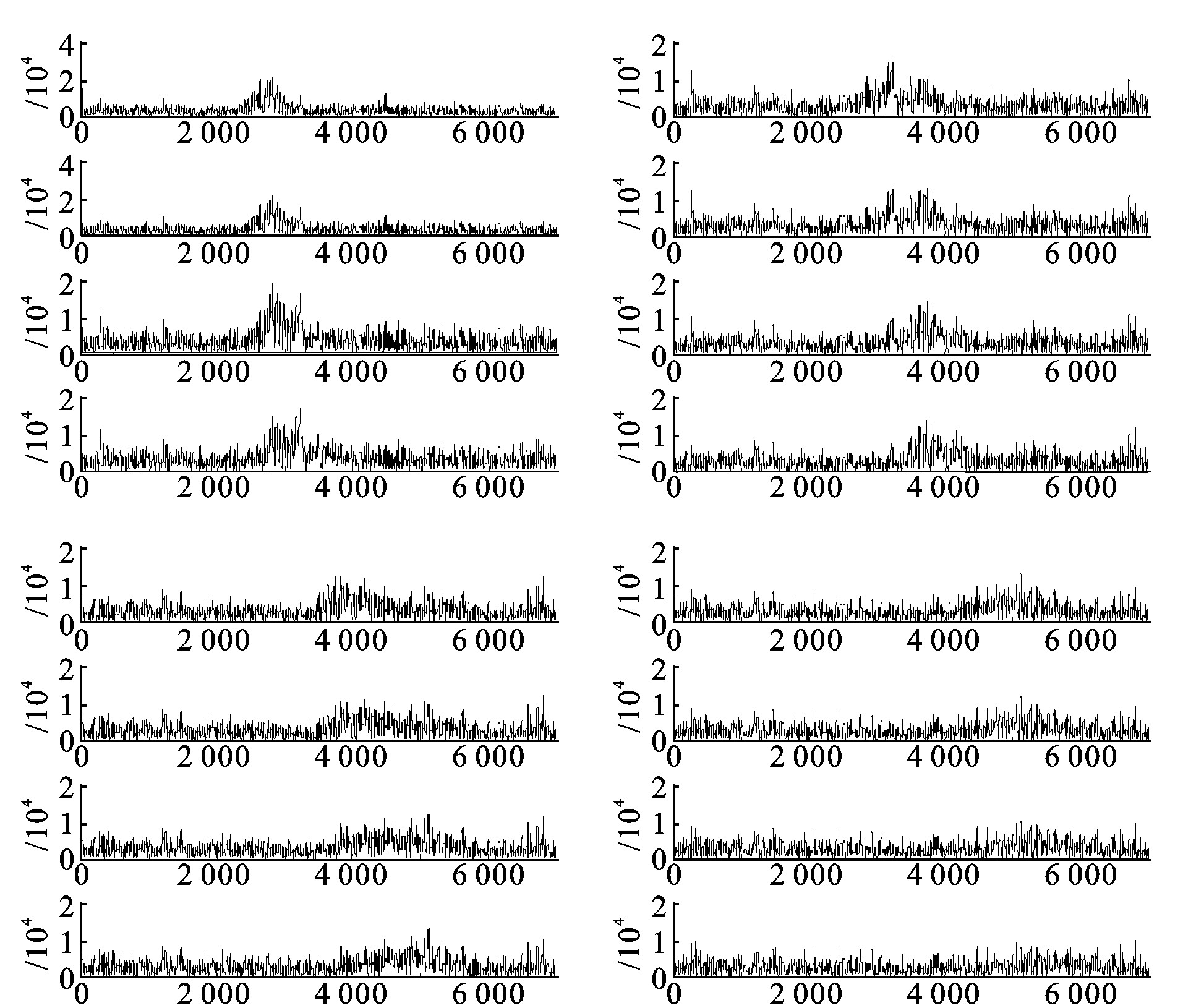
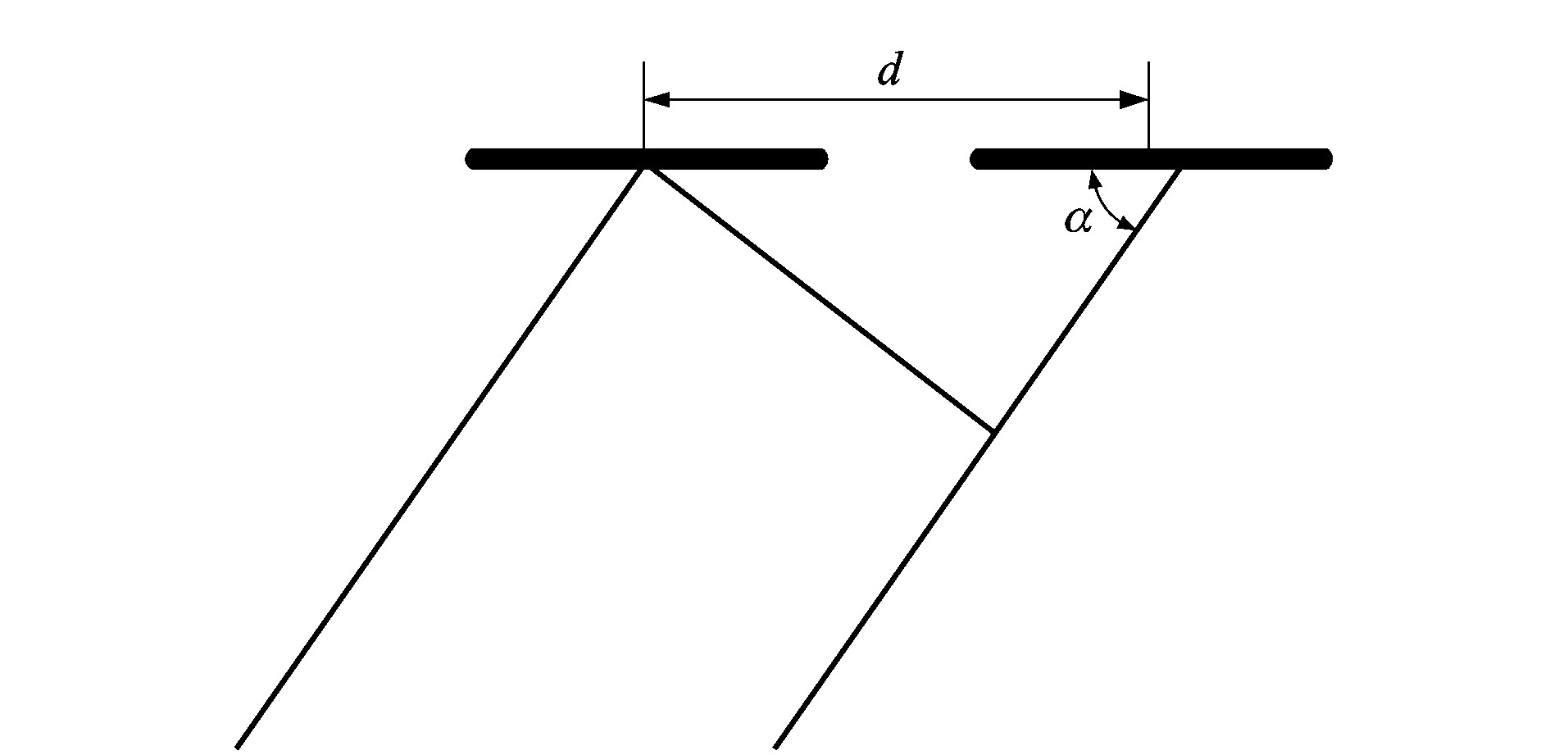
摘要: 介绍了一种建立在与相位信息相联系的分离孔径方法的基础上的、用于多波束测深声纳的海底探测方法。作为分离孔径方法的推广, 多子阵可用于估计海底回波的到达方向(DOA), 应用图像变换从相位信息中计算海底的深度。利用计算机仿真及研制的多波束条带测深仪记录的数据进行处理, 结果表明, 这种方法改善了非镜向区域的海底检测性能, 有效提高了边缘波束的测深精度, 解决了幅度检测法在大入射角时测量误差较大的问题Abstract: A bottom detection method used in the multibeam bathymeter sonar is introduced. The method is based on the separate aperture method, which is associated with phase information. As the generalization of the separate aperture method, multi subarrays can be used to estimate DOA of bottom echoes, and the depth is calculated by image transform using phase information. This technique was simulated by computer and tested with experimental data. The results show that this method can improve measurement accuracy of large angles of incidence, efficiently advance depth measurement precision and solve the problem of relative big measurement errors using amplitude based method when angles of incidence is large.
-
Key words:
- sea bottom detection /
- swath bathymeter system /
- multi beam /
- multi subarrays /
- phase slope
-
表 1 若干角度对应的深度值
Table 1. Depths at some angles
角度/ (°) 深度/m 测深误差/% 角度/ (°) 深度/m 测深误差/% -70 100.7409 0.2566 70 100.6047 0.3914 -60 100.7375 0.2599 60 100.6708 0.3259 -50 100.8171 0.1811 50 100.6251 0.3712 -40 100.8167 0.1815 40 100.6304 0.3659 -30 100.7585 0.2391 30 100.6739 0.3229 -20 100.7717 0.2261 20 100.6253 0.3710 -10 100.7678 0.2299 10 100.6092 0.3869 0 100.5987 0.3980  下载: 导出CSV
下载: 导出CSV
-
[1] Okino M, Higashi Y. Measurement of seabed topography by multibeam sonar using CFFT[J]. IEEE J. Ocean. Eng., 1986, 11(4): 474-479. [2] Hammerstad E, Phner F, Parthiot F, et al. Field testing of a new deep water multibeam echo sounder[J]. In Proc. OCEANS, 1991, 91(2): 743-749. [3] De Moustier C. Signal processing for swath bathymetry and concurrent seafloor acoustic imaging[A]. In Acoustic Signal Processing for Ocean Exploration[C]. Kluwer, NATO ASI Series, 1993.329-354. [4] De Moustier C. Signal processing for swath bathymetry and concurrent seafloor acoustic imaging[R]. AD- A266214, 1993. -

 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 446
- HTML全文浏览量: 183
- PDF下载量: 175
- 被引次数: 0
