

Car-following safe distance control algorithm and implementation based on fuzzy inference
-
摘要: 车辆跟驰是普遍存在的交通现象之一。由于驾驶员在控制车辆过程中具有模糊的、不确定性的行为特征, 难以对驾驶员的行为进行精确的数学描述, 此外, 为保证车辆行驶的安全, 有必要对车辆跟驰时如何保持安全距离进行研究。基于此, 提出基于模糊推理的车辆跟驰间距控制算法, 并对其进行了仿真运算。仿真结果表明, 用模糊推理模拟驾驶员的行为是可行的, 并且通过模糊推理控制后车的速度, 后车能够以安全距离跟随前车安全行驶Abstract: Car-following is an ubiquitous traffic phenomenon. It is hard to describe drivers' behavior with precise algorithm because of its indetermination and fuzzy characteristic when controlling the vehicle. In order to assure safety of vehicle on the road, it is necessary to research the safe distance of car-following. Based on this thought, an algorithm of car-following distance control was put forward and simulated. The simulation results show that it is feasible to describe drivers' behavior with fuzzy inference, and the following vehicle can follow the leading vehicle in safe distance by fuzzy control.
-
Key words:
- driving behavior /
- safe distance /
- car-following /
- fuzzy inference
-

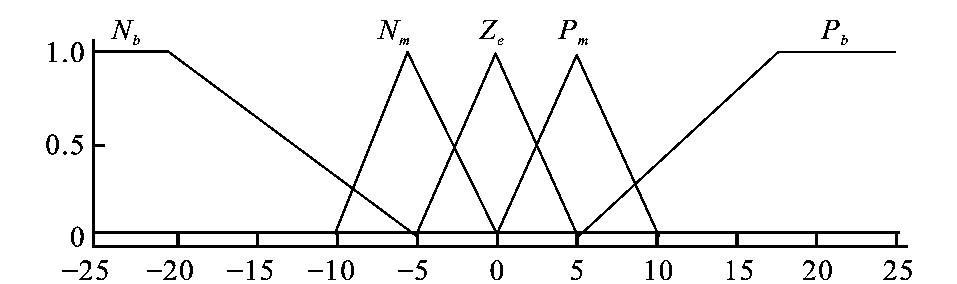
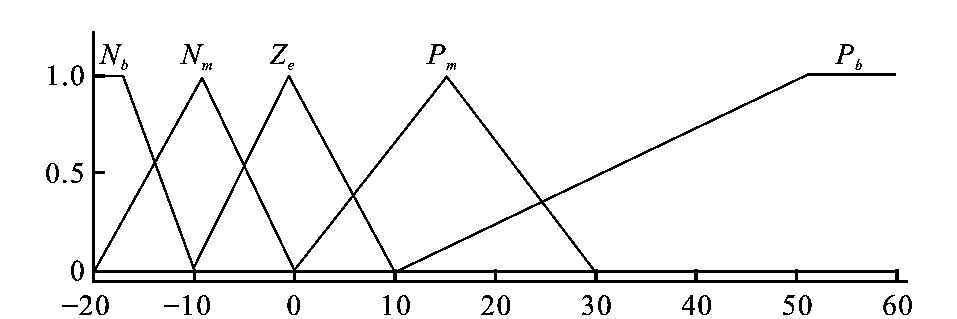
图 1 相对距离与安全距离差值的隶属度函数
Figure 1. Membership function of the difference between relative distance and safe distance

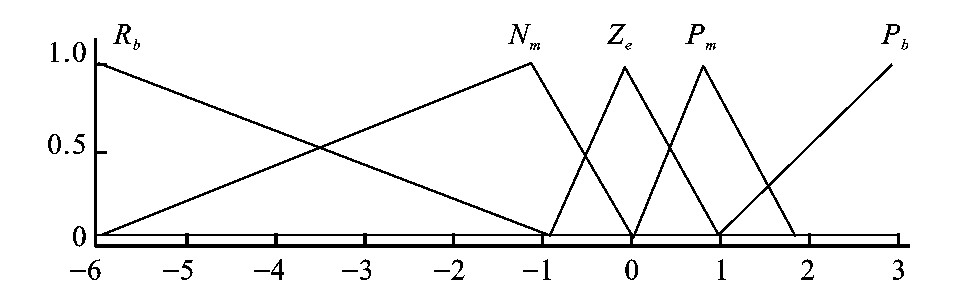
图 2 相对速度的隶属度函数
Figure 2. Membership function of relative speed between the [LV] and the [FV]

图 3 后车加速度的隶属度函数
Figure 3. Membership function of acceleration and deceleration of the [FV]

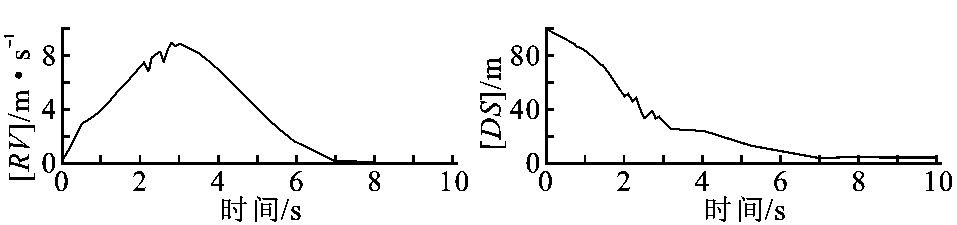
图 6 相对速度与相对距离变化图
Figure 6. Change of relative speed and relative distance between the [LV] and [FV]

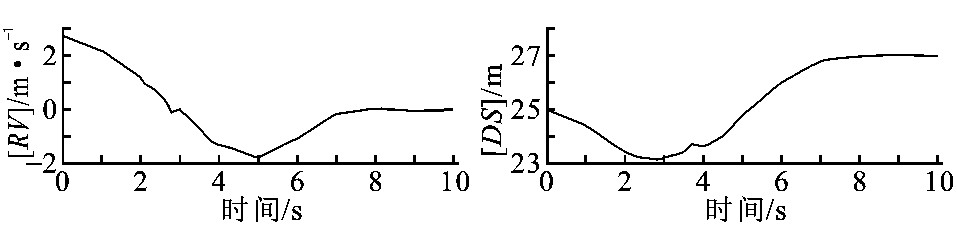
图 7 相对速度与相对距离变化图
Figure 7. Change of relative speed and relative distance between the [LV] and [FV]
表 1 前后车之间的安全距离
Table 1. Safe distance between leading vehicle and following vehicle
速度/km·h-1 50 60 70 80 90 100 速度/m·s-1 13.89 16.67 19.44 22.22 25 27.78 安全距离/m 20.84 25.00 29.16 33.33 37.5 41.67  下载: 导出CSV
下载: 导出CSV
表 2 模糊控制规则
Table 2. Fuzzy control rule
[RV] 相对距离-安全距离[DS] Nb Nm Ze Pm Pb 相对速度[RV] Nb Nm Ze Pb Pm Pb Nm Nm Nm Pm Pm Pb Ze Nb Nm Ze Pm Pb Pm Nb Nm Nm Pm Pm Pb Nb Nm Nb Ze Pm
下载: 导出CSV
-
[1] Parth Charkroborty, Shinya Kikuchi. Evaluation of the general motors based car-following models and a proposed fuzzy inference model[J]. Transportation Research, 1999, 7C(4): 209-235. [2] 徐杰, 杜文, 孙宏. 跟随车安全距离的分析[J]. 交通运输工程学报, 2002, 2(1): 101-104. http://transport.chd.edu.cn/article/id/200201022XU Jie, DU Wen, SUN Hong. Safety distance about carfollowing[J]. Journal of Traffic and Transportation Engineering, 2002, 2(1): 101-104. (in Chinese) http://transport.chd.edu.cn/article/id/200201022 [3] 何平, 王鸿绪. 模糊控制器的设计及应用[M]. 北京: 科学出版社, 1997. [4] 闻新, 周露, 李东江, 等. MATLAB模糊逻辑工具箱的分析与应用[M]. 北京: 科学出版社, 2001. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 414
- HTML全文浏览量: 204
- PDF下载量: 733
- 被引次数: 0
