

Urban arterial road coordinate control based on genetic algorithm
Article Text (Baidu Translation)
-
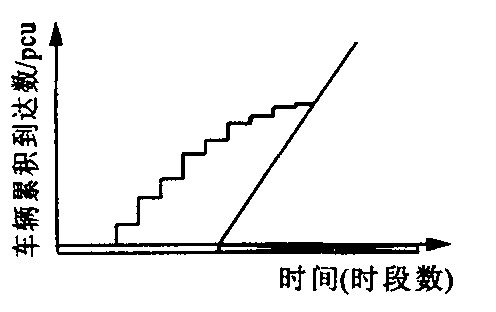
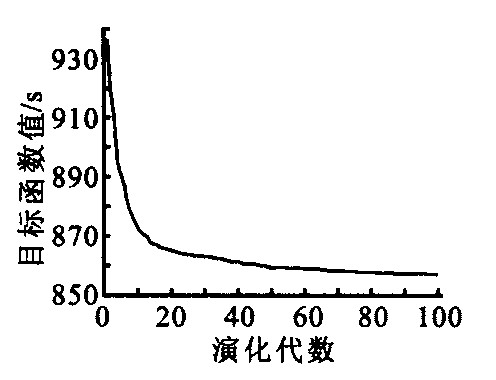
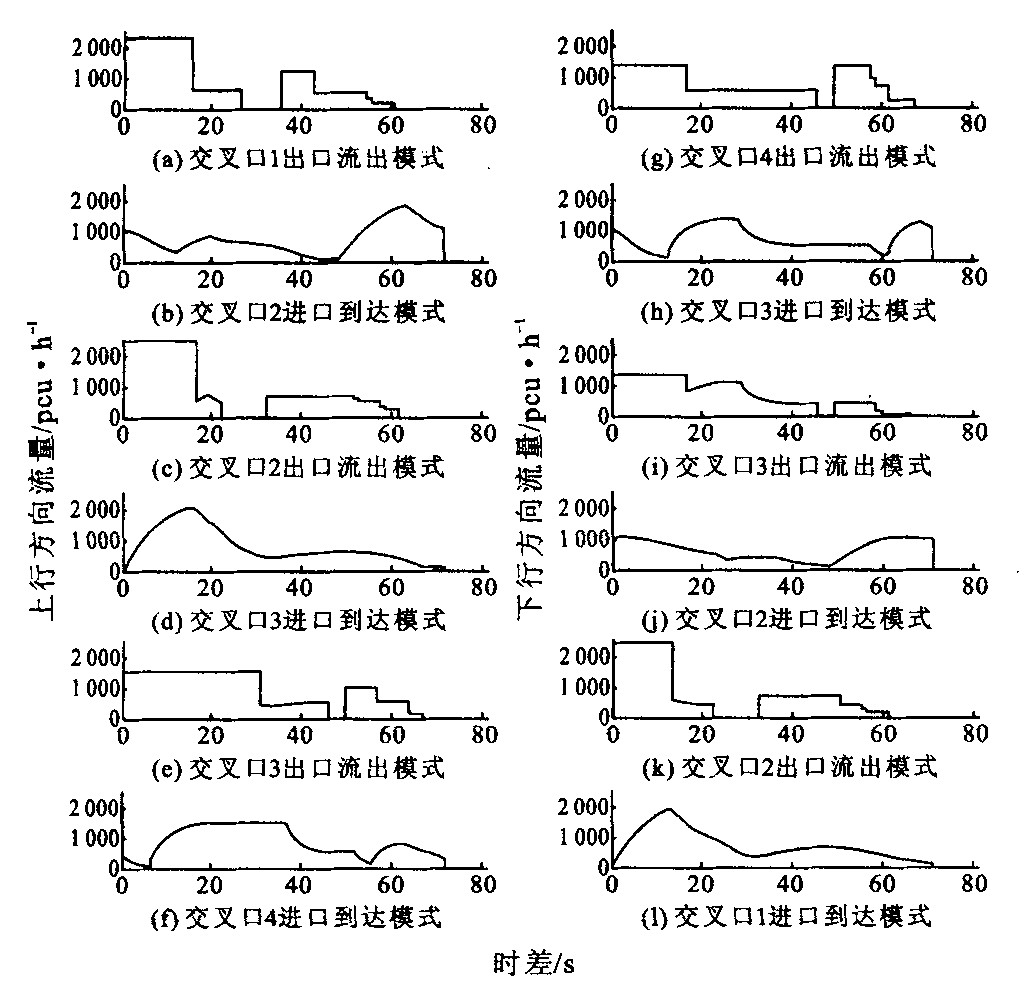
摘要: 探讨了传统解法城市干道协调控制中存在的典型问题, 对城市干道协调控制中交通流在协调控制系统内各交叉口的“驶离-到达”模式进行了分析, 提出了基于遗传算法的城市干道协调控制相位差优化设计方法。范例分析表明本文的方法求解结果优于传统数解法, 能更准确地反映实际的交通运行情况和控制效果。Abstract: The typical problems of traditional algorithm for urban arterial road coordinate control was pointed out. The real departure-arrival model at intersection was analyzed. A new method based on genitic algorithm was developed. An example shows that the new method is better than traditional one, it can accurately describe the actul traffic flow to give a good basis for the control.
-
Key words:
- urban arterial road /
- coordinate control /
- genetic algorithm /
- signal offset
-
表 1 各交叉口的交通量数据及车道设置
Table 1. Traffic data and layout of each intersection
/pcu 路口 1 东进口 西进口 南进口 北进口 2 东进口 西进口 南进口 北进口 左转 61 12 273 121 68 77 106 90 直行 619 554 95 119 546 520 187 186 右转 40 307 69 48 130 122 157 124 小计 720 873 437 288 744 719 449 400 车道功能划分 1左1直1直右 1直左1直1右 1左1直右 1直左右 1左转1直1直右 1左转1直1右转 1直左右 1直左右 路口 3 东进口 西进口 南进口 北进口 4 东进口 西进口 南进口 北进口 左转 31 10 42 78 54 132 104 9 直行 588 517 41 57 488 657 75 88 右转 93 75 58 24 18 144 112 102 小计 712 602 141 159 560 933 291 199 车道功能划分 1左转1直1右转 1左转直1直右 1直左右 1直左右 1左转1直1直右 1左转1直1右转 1直左1直右 1直左右  下载: 导出CSV
下载: 导出CSV
表 2 各交叉口延误比较
Table 2. Delay comparison of intersections
交叉口编号 东进口 西进口 南进口 北进口 交叉口总延误/s·h-1 延误改善/% 流量/pcu·h-1 1 720 873 437 288 — — 单点配时平均每车延误/s·pcu-1 20.2 13.5 22.3 18.3 41345 — 传统绿波控制每车延误/s·pcu-1 15.5 13.5 22.3 18.3 37968 8.17 本文算法平均每车延误/s·pcu-1 12.0 13.5 22.3 18.3 35441 14.28 流量/pcu·h-1 2 744 719 449 400 — — 单点配时平均每车延误/s·pcu-1 25 21 19.6 17.9 49659 — 传统绿波控制每车延误/s·pcu-1 17.9 15.5 19.9 18.1 40637 18.17 本文算法平均每车延误/s·pcu-1 12.9 20.5 19.9 18.1 40502 18.44 流量/pcu·h-1 3 712 602 141 159 — — 单点配时平均每车延误/s·pcu-1 13.7 10.5 21.6 20.4 22365 — 传统绿波控制每车延误/s·pcu-1 8.4 4.6 27.1 28.1 17039 23.81 本文算法平均每车延误/s·pcu-1 4.7 7.3 27.1 28.1 16030 28.33 流量/pcu·h-1 4 532 933 291 199 — — 单点配时平均每车延误/s·pcu-1 9.0 7.6 15.5 17.8 19959 — 传统绿波控制每车延误/s·pcu-1 9.3 4.9 23.5 25.4 21412 -7.28 本文算法平均每车延误/s·pcu-1 9.3 2.8 23.5 25.4 19453 2.54
下载: 导出CSV
-
[1] 万绪军, 陆化普. 线控系统中相位差优化模型的研究[J]. 中国公路学报, 2001, 14(2): 99-102. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200102025.htmWAN Xu-jun, LU Hua-pu. An optimal offset model for artery traffic signal control system[J]. China Journal of Highway and Transport, 2001, 14(2): 99-102. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200102025.htm [2] 刘灿齐, 杨佩昆. 信号灯交叉口车队散布模型与信号灯协调控制[J]. 同济大学学报(自然科学版), 1996, 24(6): 636-641. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ606.010.htmLIU Can-qi, YANG Pei-kun. Diffusion models of traffic platoon on signal intersection and control of coordinated signals[J]. Journal of Tongji University(Natural Science), 1996, 24(6): 636-641. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ606.010.htm [3] 卜昀, 崔晓天. 城市干道协调控制相位差优化设计方案探讨[J]. 交通与运输, 2001, 17(增): 20-21.BO Yun, CUI Xiao -tian. Offset optimal design research on urban artery coordinated control[J]. Traffic and Transportation, 2001, 17(sup): 20-21. (in Chinese) [4] 全永木焱. 城市交通控制[M]. 北京: 人民交通出版社, 1992. [5] 刘勇, 康立山, 陈毓屏. 非数值并行算法——遗传算法[M]. 北京: 科学出版社, 1995. [6] 潘正军, 康立山, 陈毓屏. 演化计算[M]. 北京: 清华大学出版社, 1998. [7] 同济大学. 上海市工程建设规范——城市道路平面交叉口规划与设计规程[R]. 上海: 同济大学, 2001. [8] 杨佩昆, 张树升. 交通管理与控制[M]. 北京: 人民交通出版社, 1995. [9] 张智星. Matlab程序设计与应用[M]. 北京: 清华大学出版社, 2002. -


 点击查看大图
点击查看大图
图(8) / 表(2)
计量
- 文章访问数: 472
- HTML全文浏览量: 193
- PDF下载量: 236
- 被引次数: 0
