

Urban traffic flow control prototype system based on multi-agent
Article Text (Baidu Translation)
-
摘要: 对中国目前的城市交通流控制系统存在的问题进行了分析。针对原系统结构中的不足提出了构建基于多智能体的智能城市交通流控制系统的思路, 并研究了该系统的基本框架和实现途径及方法, 同时探讨了该系统中各个交通智能体的结构以及它们的协调合作关系, 为基于多智能体的智能城市交通流控制系统的最终实现提供了理论指导和方法依据。Abstract: Some problems unsolved in urban traffic flow control system were analyzed. With the view of current system deficiencies, this paper put forward a viewpoint on establishing a intelligent urban traffic flow control system based on multi-agent, and the general prototype structure and development methods were proposed. The structure of traffic agents was discussed, and the coordination and collaboration problems between traffic agents were described. The study result shows that this study provides guide in theory and method for real application system development.
-

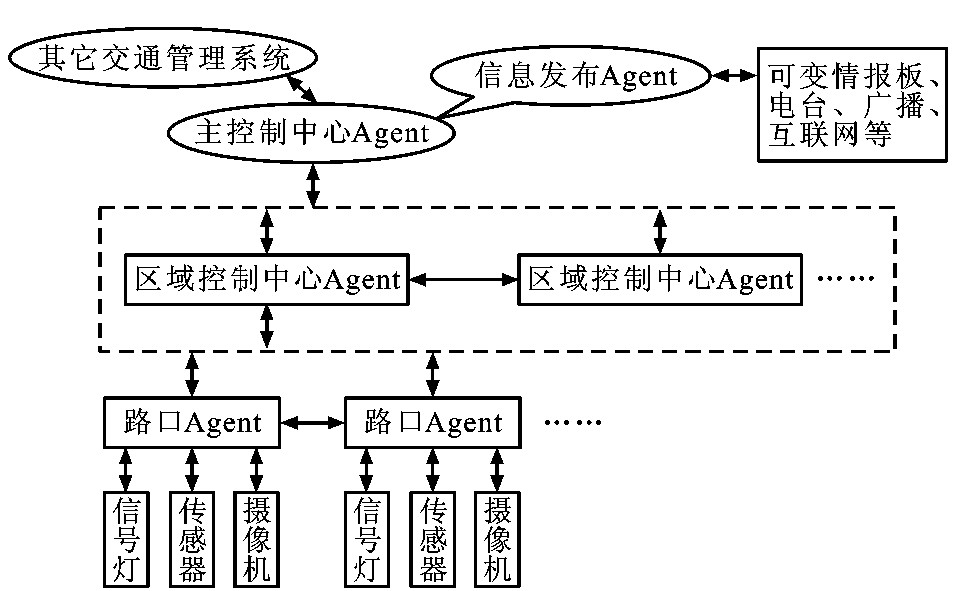
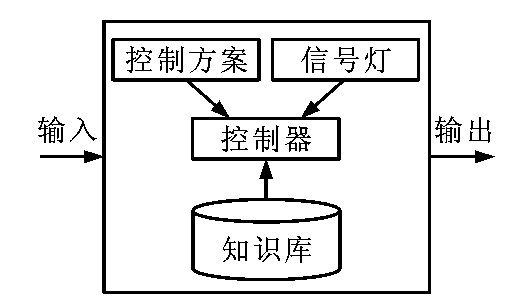
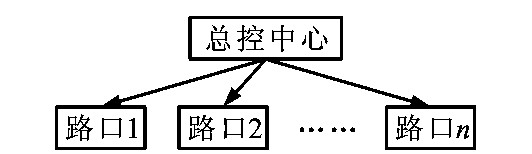
图 3 基于智能体的智能交通流控制系统结构
Figure 3. Structure of intelligent traffic control system based on multi-agent
-
[1] 李江, 傅晓光, 李作敏. 现代道路交通管理[M]. 北京: 人民交通出版社, 2000. [2] 刘大有, 杨鲲, 陈建中. Agent研究现状与发展趋势[J]. 软件学报, 2000, 11(3): 315-321. https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200003005.htmLIU Da-you, YANG Kun, CHEN Jian-zhong. Agents present status and trends[J]. Journal of Software, 2000, 11(3): 315-321. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200003005.htm [3] 徐友连. 城市交通控制和管理综合系统[J]. 交通与计算机, 1999, 17(1): 40-42. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS199901014.htmXU You-lian. Command and management system for urban transportation[J]. Computer and Communications, 1999, 17 (1): 40-42 (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS199901014.htm [4] 姚震中, 王笑京. 迎接智能运输系统的美好未来[J]. 公路交通科技, 1998, 15(3): 1-3. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK803.000.htmYAO Zhen-zhong, WANG Xiao-jing. Welcome to the wonderful future of ITS[J]. Journal of Highway and Transportation Research and Development, 1998, 15(3): 1-3. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK803.000.htm [5] 詹剑锋, 程虎. 基于Mobile Agent技术的遗留系统再工程方法[J]. 软件学报, 2002, 13(12): 2343-2348. https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200212018.htmZHAN Jian-feng, CHENG Hu. A solution to reengineering the legacy system based on mobile agent technology[J]. Journal of Software, 2002, 13(12): 2343-2348. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200212018.htm [6] 吴刚, 王怀民, 吴泉源. 一个移动智能体位置管理与可靠通信的算法[J]. 软件学报, 2002, 13(2): 269-273. https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200202015.htmWU Gang, WANG Huai-min, WU Quan-yuan. An algorithm on location management and reliable communication for mobile agents[J]. Journal of Software, 2002, 13(2): 269-273. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200202015.htm [7] 徐晋晖. 多Agent模型与联盟机制研究[D]. 北京: 清华大学, 2000. [8] 马恒太, 蒋建春. 基于Agent的分布式入侵检测系统模型[J]. 软件学报, 2000, 11(10): 1312-1319. https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200010006.htmMA Heng-tai, JIANG Jian-chun. Distributed model of intrusion detection system based on agent[J]. Journal of Software, 2000, 11(10): 1312-1319. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB200010006.htm -

 下载:
下载:
 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 392
- HTML全文浏览量: 98
- PDF下载量: 338
- 被引次数: 0
