

-
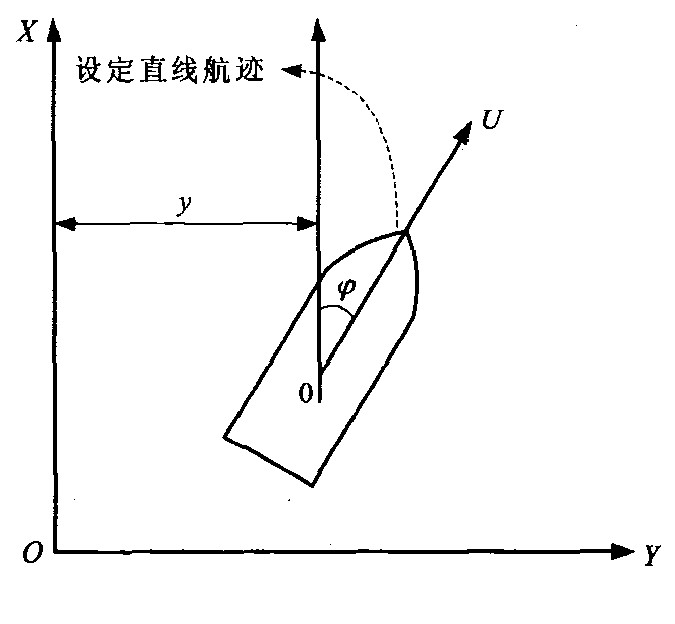
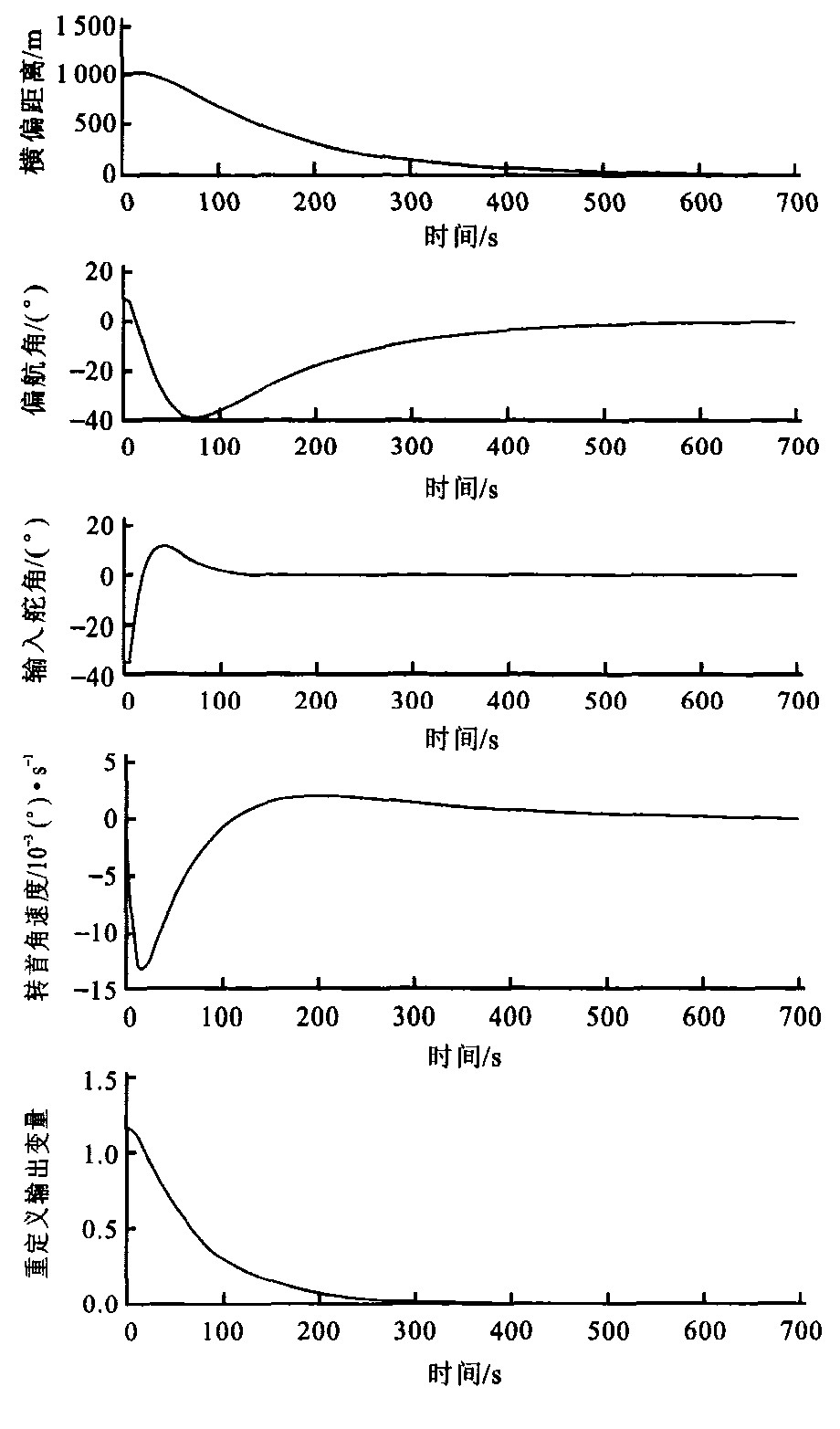
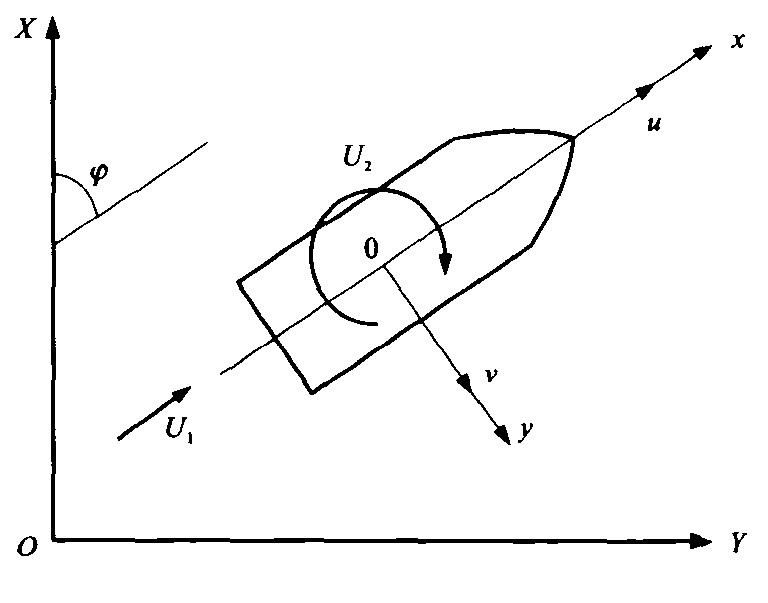
摘要: 介绍了不完全驱动系统及其意义, 建立了船舶港内自动靠离泊模型和海上航运控制模型。以船舶在大洋航行或长距离转向点间航行中经常发生的直线轨迹跟踪为例, 运用输入-输出线性化设计方法, 给出了一个具有渐近跟踪能力的控制律。将该控制律应用于一个实例, 并用Matlab语言进行了计算机仿真, 结果表明该控制器可以解决船舶的不完全控制问题。Abstract: The underactuated system and its meaning were introduced. The automatic berthing control model and straight-line tracking control model for underactuated surface vessels were de-veloped. A state feedback controller that forces an underactuated ship to asymptolically track a straight-line was presented using the input-output linearization technique. This controller was ap-plied to an example, its control was simulated with Matlab software. The results show that this control strategy can resolve the control problems of underactuated ships.
-
[1] Do K D, Jiang Z P, Pan J. Underactuated ship global tracking under relaxed conditions[J], IEEE Transactions on Automatic. Control, 2002, 47(9): 1529-1536. doi: 10.1109/TAC.2002.802755 [2] [美]格林伍德. 经典动力学[M]. 北京: 科学出版社, 1982. [3] Ryan E P. On brockett's condition for smooth stabilizability and its necessity in a context of nonsmooth feedback[J]. Journal of Control Optimization, 1994, 32(6): 1597-1604. doi: 10.1137/S0363012992235432 [4] Kolmanovsky I V, McClamroch N H. Developments in non-holonomic control problems[J]. Control Systems Magazine, 1995, 15(6): 20-36. [5] Reyhanoglu M. Exponential stabilization of an underactuated autonomous surface vessel[J]. Automatica, 1997, 33(12): 2249-2254. doi: 10.1016/S0005-1098(97)00141-6 [6] Tsiotra P. Invariant manifold techniques for control of underactuated mechanical systems[R]. Proceedings of the American Control Conference, 1997. [7] Francesco Bullo, Naomi Ehrich Leonard. Control lability and motion algorithms for underactuated lagrangian systems on lie groups[J]. IEEE Transactions Automatic Control, 2000, 45 (8): 1437-1454. [8] Indiveri G, Aicardi M. Nonlinear time-invariant feedback control of an underactuated marine vehicle along a straight course[A]. Proc. of the IFAC Conference on Manoeuvring and Control of Marine Craft[C]. MCMC 2000, Aalborg, Denmark, 2000. [9] Tae-Han Kim, Tamer Basar, In-Joong Ha. Asymptotic stabilization of an underactuated surface vessel via logic-based con-trol[R]. Proceedings of the American Control Conference, 2002. [10] Jiang Z P. Global tracking control of underactuated ships by Lyapunov's direct method[J], Automatica, 2002, 38 (2): 301-309. doi: 10.1016/S0005-1098(01)00199-6 [11] Do K D, Jiang Z P. Robust global stabilization of underactuated ships on a linear course: state and output feedback[J]. International Journal of Control, 2003, 76(1): 1-17. [12] 贾欣乐, 杨盐生. 船舶运动数学模型[M]. 大连: 大连海事大学出版社, 1999. [13] 杨盐生. 不确定系统的鲁棒控制及其在船舶运动控制中的应用[D]. 大连: 大连海事大学, 2000. [14] Shankar Sastry. Nonlinear Systems: Analysis, Stability and Control[M]. New York: Springer-Verlag, 1999. -

 下载:
下载:
 点击查看大图
点击查看大图
图(3)
计量
- 文章访问数: 438
- HTML全文浏览量: 143
- PDF下载量: 169
- 被引次数: 0
