

-
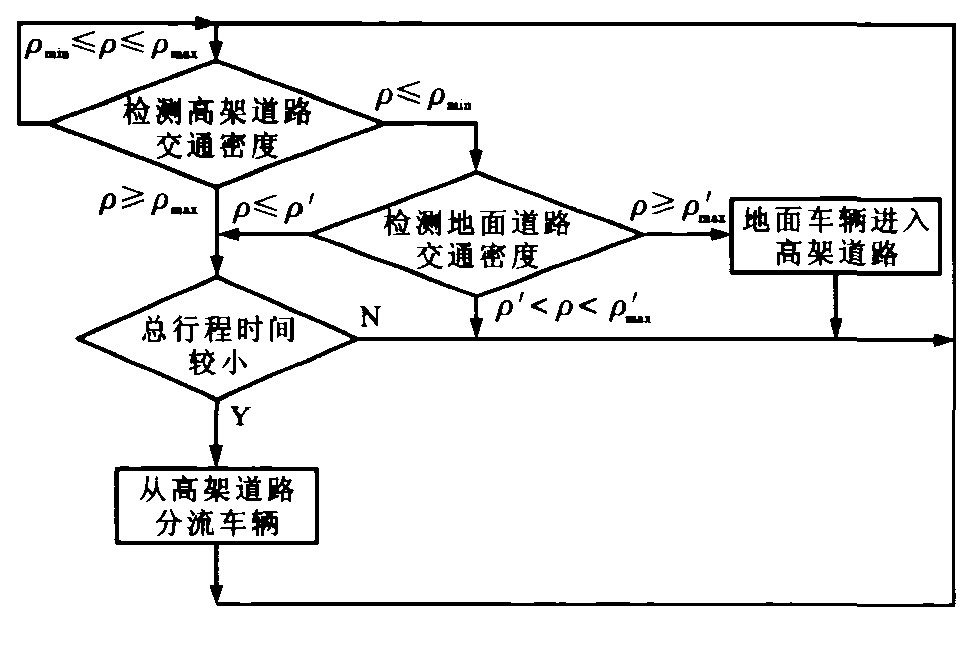
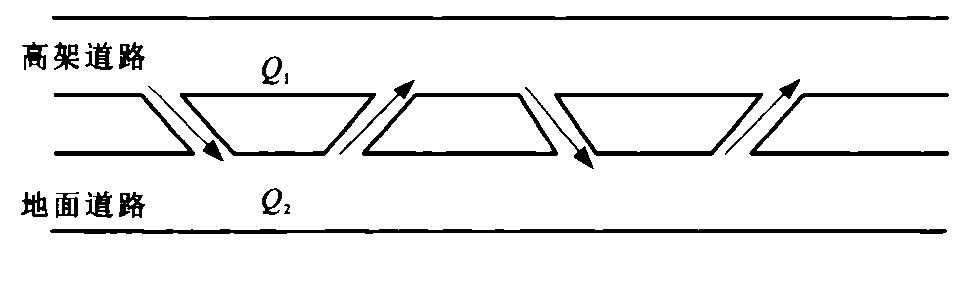
摘要: 将高速公路中通道控制的概念应用于城市道路, 研究了这种控制模式在城市中的应用范围, 讨论了通道控制策略, 采用总行程时间作为控制变量, 分别推导了总行程时间的各组成部分, 并建立总行程时间最小控制策略下的通道控制数学模型和控制流程。数值算例结果表明: 采用总行程时间最小为控制策略的城市交通通道控制方法, 可使系统达到最佳。Abstract: The corridor control model, which is usually used in freeway, was adopted to urban road control. Its applying situation and control strategy were analyzed when the total travel time was taken as control parameter. The constitute parts of total travel time were seperated. The minimization of total travel time as a control goal, its mathematical model and control program were developed. With an example, the results show that this control technology is an effective way to make the control system optimum,
-
Key words:
- traffic engineering /
- corridor control /
- control model /
- total travel time
-
[1] 刘伟铭, 杨兆升. 高速公路系统控制方法[M]. 北京: 人民交通出版社, 1998. [2] 杨佩昆, 张树生. 交通管理与控制[M]. 北京: 人民交通出版社, 1995. [3] 李海渊, 秦吉玛, 王彦卿. 交通控制手册[M]. 北京: 人民交通出版社, 1987. [4] Markos Papageorgiou. An integrated control approach for traf-fic corridors[J]. Transpn. Res. C, 1995, 3(1): 19-29. [5] Tanner, J C. A Theoretical Analysis of Delays at an Uncon-trolled Intersection. [M]. Springer-Verlag Publications, 1975. [6] Ajay K Rathi. A control scheme for high traffic density sectors[J]. Transpn. Res. B, 1988, 22(1): 81-101. [7] Kimber R M. Traffic Queues and Delays at Road Junctions[M]. TRRL LR. 909, 1979. [8] Newman L A, Dunnet G. Freeway ramp control-what it canand cannot do[J]. Traffic Engineering, 1969, 19(7): 14-21. -

 下载:
下载:


 点击查看大图
点击查看大图
图(3) / 表(1)
计量
- 文章访问数: 380
- HTML全文浏览量: 170
- PDF下载量: 203
- 被引次数: 0
