

Design method of pedestrian phases at multi-phase signal intersection
Article Text (Baidu Translation)
-
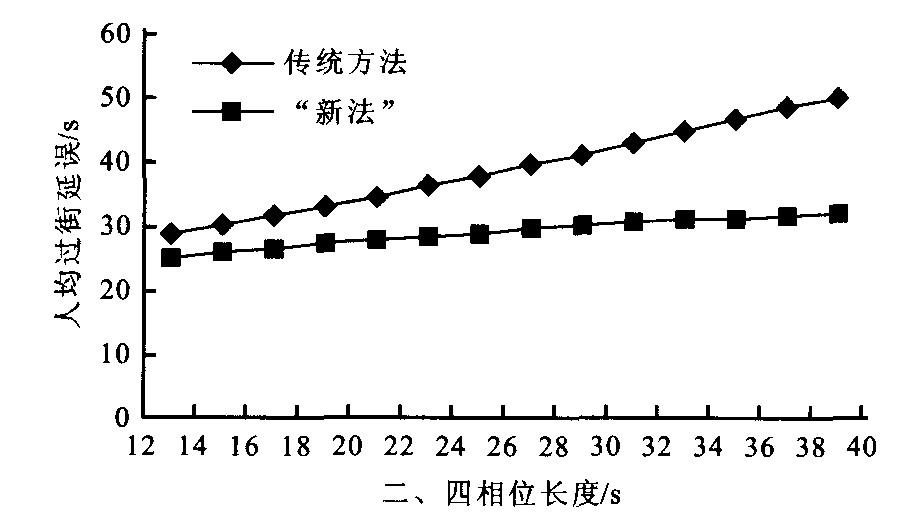
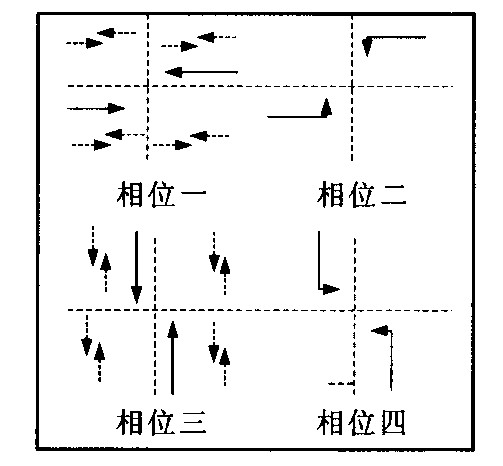
摘要: 运用相位组合技术, 对行人相位与机动车相位的各种可能的组合进行了研究, 提出了二次过街条件下行人相位的设计方法。与传统行人相位设计方法的对比分析表明这种行人相位设计方法缩短了行人过街最短绿灯时间, 降低了过街人均延误。Abstract: This paper studied all the possibility of combination between pedestrian phases and motor phases, and put forward the design method of pedestrian phases under the condition of twice -cross street. The comparison of the method and the traditional design method of pedestrian phases demonstrates the new method can shorten the minimum green time, and reduce pedestrian delay.
-
Key words:
- traffic control /
- twice-cross street /
- pedestrian phases /
- minimum green time /
- average pedestrian delay
-
表 1 最短绿灯时间对比
Table 1. Comparison of minimun green time
横道长度/m 传统方法/s 相位组合方法/s 降低比例/% 20 18.67 10.33 44.64 25 22.83 12.42 45.62 30 27.00 14.50 46.30 35 31.17 16.58 46.79 40 35.33 18.67 47.17 50 43.67 22.83 47.71  下载: 导出CSV
下载: 导出CSV
表 2 排队区域的服务水平
Table 2. Serves level of queue area
服务水平 人均占地面积/m2 说明 A ≥1.21 可以站立或自由穿过排队区, 而不会干扰队内其他人 B 0.93~1.21 可以站立或不干扰队内其他人做有限制的活动 C 0.65~0.93 可以站立和进行穿过排队区的有限制的活动, 但要干扰队内其他人, 该密度仍在使人舒服的范围内 D 0.28~0.65 站立时不同他人接触是可能的, 在队内行动要受到很大限制, 只能随着人群一起向前走, 在这一密度下, 长时间等待使人很不舒服 E 0.19~0.28 站立时不可避免同他人接触, 在队内活动不可能, 在这种密度下排队只能持续很短的时间, 否则会感到非常的不舒服 F ≤0.19 实际上, 所有排队人群中的人在站立时与周围的人都有直接的接触, 在这一密度下, 是极为不舒服的, 队内不可能有任何活动, 在这一密度下的拥挤人群存在着潜在的恐慌
下载: 导出CSV
表 3 行人中央驻足区的长度
Table 3. Length of pedestrian stand area
行人数量 服务水平为D 服务水平为E 驻足区面积/m2 驻足区长度/m 驻足区面积/m2 驻足区长度/m 50 14 7 10 5 100 28 14 19 10 150 42 21 29 14 200 56 28 38 19 250 70 35 48 24 300 84 42 57 29 350 98 49 67 33 400 112 56 76 38 450 126 63 86 43 500 140 70 95 48
下载: 导出CSV
-
[1] 杨晓光, 陈白磊, 彭国雄. 行人交通控制信号设置方法研究[J]. 中国公路学报, 2001, 14(1): 73-77. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200101015.htmYANG Xiao-guang, CHEN Bai-lei, PENG Guo-xiong. Study of the way of setting pedestrian's traffic control signal[J]. China Journal of Highway and Transport, 2001, 14(1): 73-77. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200101015.htm [2] 彭国雄, 王浩, 杨晓光. 诱导条件下信号灯相位相序设计[J]. 中国公路学报, 2001, 14(4): 86-90. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200104019.htmPENG Guo-xiong, WANG Hao, YANG Xiao-guang. Traffic signal phasing under the condition of route guidance system[J]. China Journal of Highway and Transport, 2001, 14(4): 86-90. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200104019.htm [3] 王浩. 交通信号相位相序问题研究[D]. 上海: 同济大学, 2002. [4] 彭国雄, 张扬. 叠加相位设计方法研究[J]. 中国公路学报, 2001, 14(sup): 59-62. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL2001S1015.htmPENG Guo-xiong, ZHANG Yang. Study of the way of setting ripple changes[J]. China Journal of Highway and Transport, 2001, 14(sup): 59-62. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL2001S1015.htm [5] 孙明正. 信号控制交叉口自行车交通设计理论研究[D]. 上海: 同济大学, 2003. [6] 杨佩昆. 交通管理与控制[M]. 北京: 人民交通出版社, 1997. [7] 任福田. 道路通行能力手册(HCM)[M]. 北京: 中国建筑工业出版社, 1999. [8] 杨晓光. 城市道路交通设计指南[M]. 北京: 人民交通出版社, 2003. -


 点击查看大图
点击查看大图
图(7) / 表(3)
计量
- 文章访问数: 544
- HTML全文浏览量: 251
- PDF下载量: 360
- 被引次数: 0
