

Three-mass vehicle model of people-vehicle-road interaction
Article Text (Baidu Translation)
-
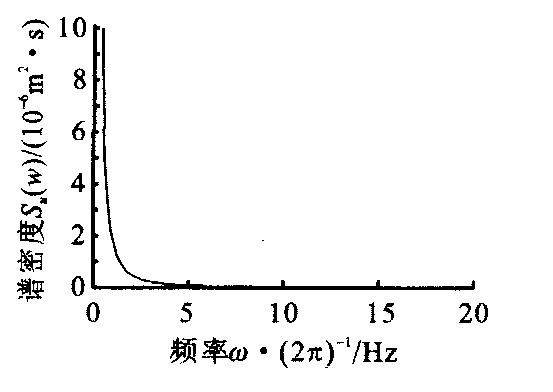
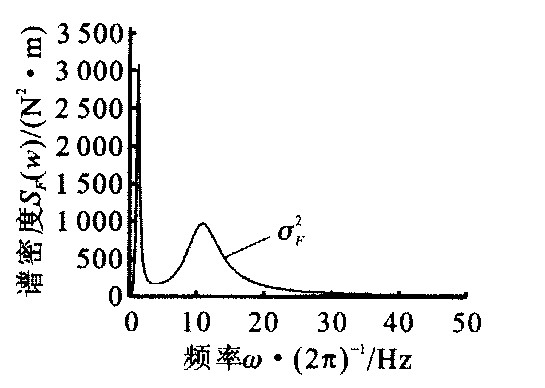
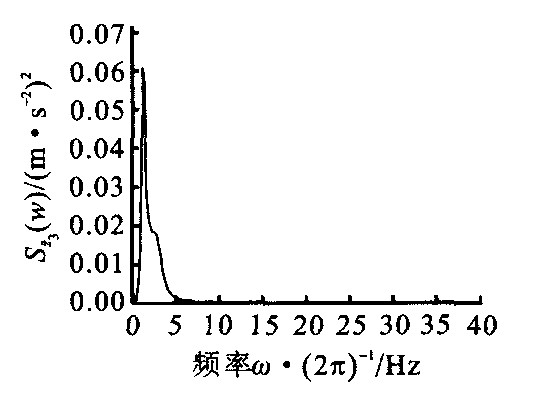
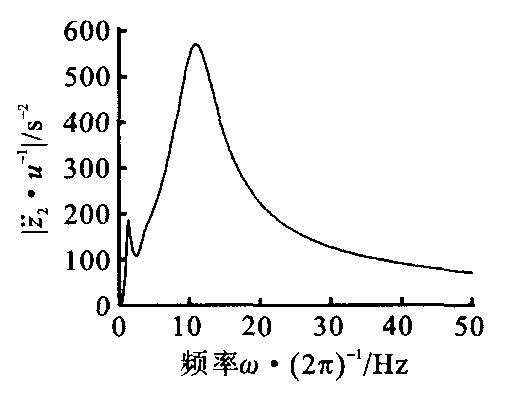
摘要: 基于人-车-路相互作用建立了简化的三质量车辆模型, 运用叠加法计算了车辆动载荷的幅频特性与功率谱密度、加速度放大因子与加速度谱, 利用所建的简化车辆模型对车辆的振动特性进行了评价, 研究了车辆载荷与行驶安全性、加速度与振动舒适性的关系。结果表明, 三质量车辆模型更能体现人体的振动舒适程度与路面不平度的响应关系, 对于深入分析路面结构的动力响应有重要价值。Abstract: A simple three-mass vehicle model was founded on the basis of people-vehicle-road interaction. With this model, the amplitude and power spectral density(PSD) of vehicle dynamic load were calculated, the amplitude factor and PSD of acceleration were analyzed, the vibration characteristics of vehicle were evaluated, the relations of dynamic load with ride safety, acceleration and vibration comfort were discussed. The results show that this model can accurately reflect the dynamic response of people's comfort with pavement roughness.
-
Key words:
- traffic engineering /
- pavement roughness /
- vehicle model /
- vibration /
- spectral density
-
[1] Cebon D. Handbook of Vehicle-Road Interaction[M]. England, Swets and Zeitlinger Publishers, 1999. [2] Monismith C L, Sousa J, Lysmer J. Modern pavement design technology including dynamic load conditions[A]. SAE Conference on Vehicle/Pavement Interaction[C]. SP765, SAE Trans. 881845, Indianapolis, SAE, 1988. [3] O'Connell S, Abbo E, Hedrick K. Analysis of moving dynamic loads on highway pavements, part Ⅰ: vehicle response[A]. Proc. Int. Symp. on Heavy Vehicle Weights and Dimensions[C]. Kelowna, British Columbia, 1986. [4] 孙璐, 邓学钧. 路面波谱密度与运动车辆对路面的随机动压力分析[J]. 西安公路交通大学学报, 1996, 16(2): 17—21. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL602.004.htmSUN Lu, DENG Xue-jun. Analysis of pavement wavenumber spectral density and random dynamic pressure generated by vehicle-pavement interactions[J]. Journal of Xi'an Highway University, 1996, 16(2): 17—21. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL602.004.htm [5] 孙璐, 邓学钧. 车辆地面结构系统动力学[M]. 北京: 人民交通出版社, 2000. [6] 俞载道, 曹国敖. 随机振动理论及其应用[M]. 上海: 同济大学出版社, 1988. [7] [德国]米奇克. 汽车动力学(B卷)[M]. 北京: 机械工业出版社, 1994. [8] 靳晓雄, 张立军. 汽车振动分析[M]. 上海: 同济大学出版社, 2002. -

 下载:
下载:


 点击查看大图
点击查看大图

图(8)
计量
- 文章访问数: 466
- HTML全文浏览量: 148
- PDF下载量: 181
- 被引次数: 0
