

-
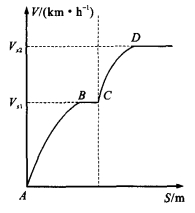
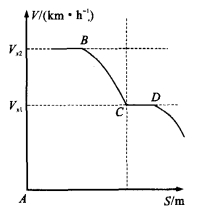
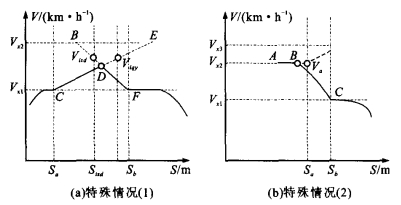
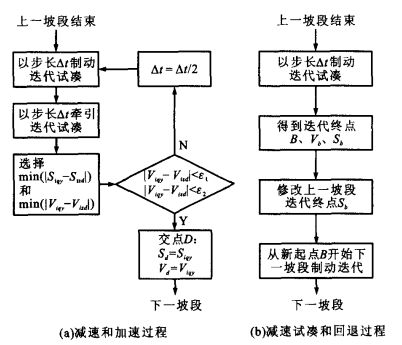
摘要: 分析了地铁列车的牵引特性和制动特性, 提出了三种典型的牵引计算策略, 即最快速牵引策略, 最经济牵引策略和理想型牵引策略。在最快速牵引策略的基础上, 将列车运行过程分解为启动和牵引过程、制动和进站过程、接近限速运行的中间运行过程三部分, 针对各个过程分别构建了牵引计算的软件模型和算法。试验线路计算表明, 该模型可以计算出区段最短运行时间, 并使列车准确停站, 具有一定实用价值。Abstract: Based on studying metro's traction characteristic figures and brake characteristic figures, this paper put forward three representative policies of traction calculation, the quickest policy, the most economical policy and the perfect policy. According to the quickest policy, metro's operation was divided into start-up and traction process, stop and pulling process, and keep running at limit velocity operation process. Aiming at these processes, their traction calculation software models and arithmetics were presented. Tested calculation results indicate that the traction system can calculate the shortest travel time with the models and arithmetics, and make train pulling process more veracious.
-
Key words:
- urban mass transit /
- traction calculation /
- traction policy /
- algorithm
-
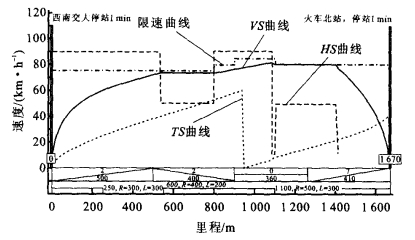
表 1 算例线路数据
Table 1. Sample line data
开始位置/m 0 250 500 550 600 800 900 1 100 1 260 1 400 坡段长度/m 250 250 50 50 200 100 200 160 140 270 坡度/‰ 2 2 -2 -2 -2 -2 0 0 7 7 曲线半径/m ∞ 300 300 ∞ 400 ∞ ∞ 500 500 ∞ 限速/ (km·h-1) 80 75 75 80 75 80 85 80 80 80  下载: 导出CSV
下载: 导出CSV
表 2 计算结果
Table 2. Calculation result
区间距离/m 走行时间/s 平均速度/ (km·h-1) 最大速度/ (km·h-1) 进站初速/ (km·h-1) 牵引时间/s 牵引率/% 1 670 104.2 57.7 81.6 75.2 53.4 51.3
下载: 导出CSV
-
[1] 何鸿云, 朱金陵. 列车牵引计算及操纵示意图计算机软件的开发[J]. 西南交通大学学报, 2000, 35 (5), 514—516. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT200005016.htmHE Hong-yun, ZHU Jin-ling. Design of software for traction calculation and operation schematic diagram of trains[J]. Journal of Southwest Jiaotong University, 2000, 35(5): 514—516. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT200005016.htm [2] 郭佑民, 王志伟, 武福, 等. 列车操纵与运行仿真系统[J]. 兰州铁道学院学报, 2002, 21 (6): 125—127. https://www.cnki.com.cn/Article/CJFDTOTAL-LZTX200206034.htmGUO You-min, WANG Zhi-wei, WU Fu, et al. Train operation and movement simulation system[J]. Journal of Lanzhou Railway University, 2002, 21(6): 125—127. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-LZTX200206034.htm [3] 毛保华, 何天键, 袁振洲, 等. 通用列车运行模拟软件系统研究[J]. 铁道学报, 2000, 22 (1): 1—5. doi: 10.3321/j.issn:1001-8360.2000.01.001MAO Bao-hua, HE Tian-jian, YUAN Zhen-zhou, et al. A general-purposed simulation system on train movement[J]. Journal of the China Railway Society, 2000, 22(1): 1—5. (in Chinese) doi: 10.3321/j.issn:1001-8360.2000.01.001 [4] 金炜东, 王自力, 李崇维, 等. 列车节能操纵优化方法研究[J]. 铁道学报, 1997, 19 (6): 58—59. doi: 10.3321/j.issn:1001-8360.1997.06.010JIN Wei-dong, WANG Zi-li, LI Chong-wei, et al. Study on optimization method of train operation for saving energy[J]. Journal of the China Railway Society, 1997, 19(6): 58—59. (in Chinese) doi: 10.3321/j.issn:1001-8360.1997.06.010 [5] TB/T1407 1998, 列车牵引计算规程[S]. [6] 饶忠. 列车牵引计算(第二版)[M]. 北京: 中国铁道出版社, 1999. [7] 李立明, 罗晓峥, 沈祥林. 地铁电动车组交流牵引计算与仿真分析[J]. 机车电传动, 2003, 41 (3): 33—35. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC200303008.htmLI Li-ming, LUO Xiao-zheng, SHEN Xiang-lin. Calculation and simulation analysis of AC traction formetro EMUs[J]. Electraic Drive for Locomotives, 2003, 41(3): 33—35. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC200303008.htm -

图(6) / 表(2)
计量
- 文章访问数: 884
- HTML全文浏览量: 239
- PDF下载量: 1175
- 被引次数: 0
