

-
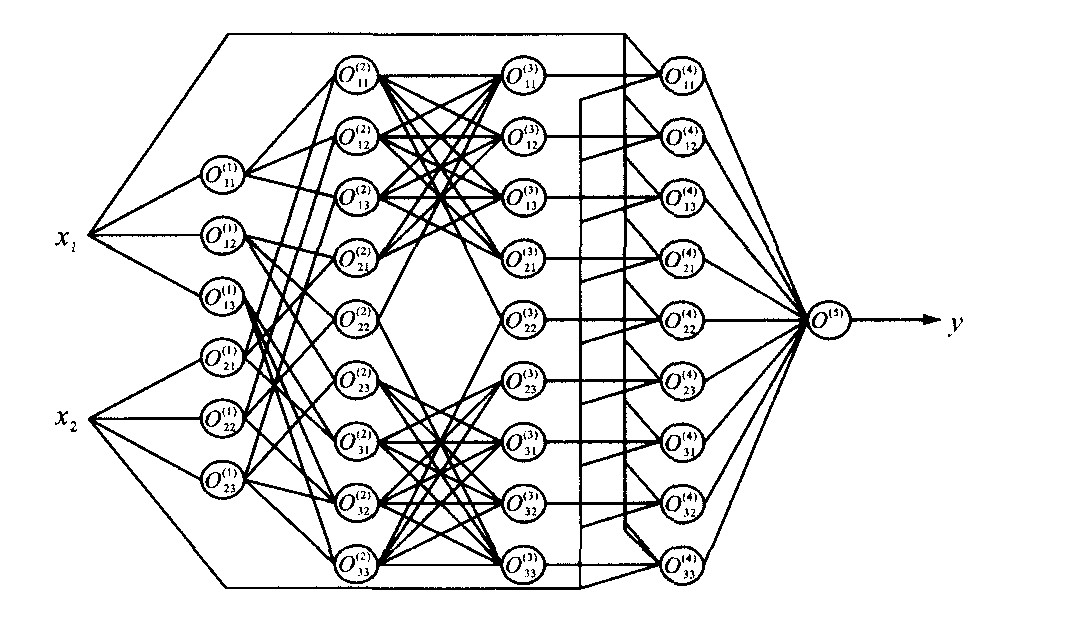
摘要: 应用自适应神经模糊推理系统, 以两车车速差、跟随车的车速、行车间距为输入量, 两车的追尾概率为输出量, 建立了高速公路汽车追尾的ANFIS(自适应神经模糊推理系统)概率模型, 计算出在不同车速差和行车间距时的高速公路汽车追尾概率。该概率模型为高速公路汽车追尾建模提供了一种新思路, 对模型进行实时校正后用于追尾预测, 对避免高速公路汽车追尾具有指导意义。
-
关键词:
- 交通安全 /
- 高速公路 /
- 汽车追尾 /
- 自适应神经模糊推理系统 /
- 追尾预测
Abstract: A probability model of automobile rear end collision based on ANFIS(adaptive neural-fuzzy inference systems) was provided, the speed difference of automobiles, the speed of tracing automobile and the distance of automobiles were taken as inputs, and the probability of automobile rear end collision was taken as output. The probability of automobile rear end collision was calculated in different speed difference and distance of automobiles using the model. The probability model provides a new plan for analysing automobile rear end collision, and has directive role for decreasing automobile rear end collision on freeway. -
表 1 部分模糊规则
Table 1. Part fuzzy rules
追尾概率P 速度差Δv NB NM NS ZO PS PM PB 车速vB NB NS NS NB NB NB NB NB NM NS NS NS NB NB NB NB NS NS NS NS NS NB NB NB ZO NM NS NS NS NB NB NB PS NM NM NS NS NS NS NB PM ZO NM NM NS NS NS NS PB ZO NM NM NM NM NS NS  下载: 导出CSV
下载: 导出CSV
表 2 速度差Δv=30 km/h, vB=120 km/h时不同行车间距下的汽车追尾概率
Table 2. Probability of automobile rear end collision in different gap with Δv=30 km/h and vB=120 km/h
行车间距/m 350 320 290 260 230 200 170 140 110 80 60 40 20 追尾概率 0 0 0.01 0.02 0.06 0.11 0.14 0.25 0.38 0.45 0.65 0.82 0.93
下载: 导出CSV
表 3 速度差Δv=60 km/h, vB=120 km/h时不同行车间距下的汽车追尾概率
Table 3. Probability of automobile rear end collision in different gap with Δv=60 km/h and vB=120 km/h
行车间距/m 350 320 290 260 230 200 170 140 110 80 60 40 20 追尾概率 0 0 0.01 0.03 0.09 0.17 0.26 0.36 0.43 0.58 0.77 0.92 0.96
下载: 导出CSV
-
[1] 熊和金, 刘清, 杨杰. 汽车追尾事故的BP网络模型研究[J]. 武汉交通科技大学学报, 2002, 24(5): 25-28. https://www.cnki.com.cn/Article/CJFDTOTAL-JTKJ200001007.htmXIONG He-jin, LIUQing, YANG Jie. A study of back propagation neural networks model for car tracing cauda[J]. Journal of Wuhan Transportation University, 2002, 24(5): 25-28. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTKJ200001007.htm [2] 李作敏, 杜颖. 交通工程学[M]. 北京: 人民交通出版社, 1995. [3] 郑安文. 高速公路行车间距分析与防追尾装置开发[J]. 武汉理工大学学报, 2002, 24(9): 62-65. https://www.cnki.com.cn/Article/CJFDTOTAL-WHGY200209018.htmZHENG An-wen. The analysis of the motorway vehicle gap and designing the device of protective vehicle collision[J]. Journal ofWuhan University of Technology, 2002, 24(9): 62-65. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-WHGY200209018.htm [4] 王年, 任彬, 黄勇. 人工神经网络在公路工程车辆管理中的应用[J]. 电子技术应用, 1998, 34(9): 11-12. https://www.cnki.com.cn/Article/CJFDTOTAL-DZJY809.002.htmWANG Nian, REN Bin, HUANG Yong. The application of artificial neural networks in vehicle management[J]. Application of Electric Technology, 1998, 34(9): 11-12. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DZJY809.002.htm [5] 王永骥, 涂健. 神经元网络控制[M]. 北京: 机械工业出版社, 1999. [6] 曾庆宁, 刘清, 周德新. 基于ANFIS的非线性自适应噪声消除[J]. 通信学报, 2001, 18(12): 21-23. https://www.cnki.com.cn/Article/CJFDTOTAL-TXXB200112016.htmZENG Qing-ning, LIU Qing, ZHOU De-xin. Nonlinear adaptive noise cancellation based on ANFIS[J]. Journal of China Communication, 2001, 18(12): 21-23. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TXXB200112016.htm -

 点击查看大图
点击查看大图
图(1) / 表(3)
计量
- 文章访问数: 364
- HTML全文浏览量: 148
- PDF下载量: 336
- 被引次数: 0
