

Short-term traffic flow prediction methods comparison of road networks
Article Text (Baidu Translation)
-
摘要: 介绍了用于短期交通流预测的两大类模型: 统计预测算法和人工神经网络模型。对其中各种模型的特征进行了比较, 将历史平均模型、求和自回归滑动平均模型(ARIMA)、非参数回归模型、径向基函数(RBF) 神经网络模型与贝叶斯组合神经网络模型, 应用于一个真实路网的短期流量预测, 比较了各模型的预测结果。结果表明, 组合神经网络模型预测误差最小, 可靠性最高, 是一种对短期交通流预测的有效方法。Abstract: A large number of techniques have been applied into short-term traffic flow prediction, which can be classified into two groups: statistical models and artificial neural network model. The models and their application were discussed and compared. Several models, including historical average, ARIMA (auto regressive integrated moving average) model, nonparametric regression, RBF (radial basis function) neural network and Bayesian combined neural network model were applied into a numerical example of short-term traffic volume prediction in a field network, their prediction results and performances were compared. It was found that the error of hybrid neural network model is littlest, its prediction reliability is highest, it is the most effective method to predicte short-term traffic flow.
-
Key words:
- traffic engineering /
- short-term traffic flow /
- prediction /
- methods /
- comparing
-

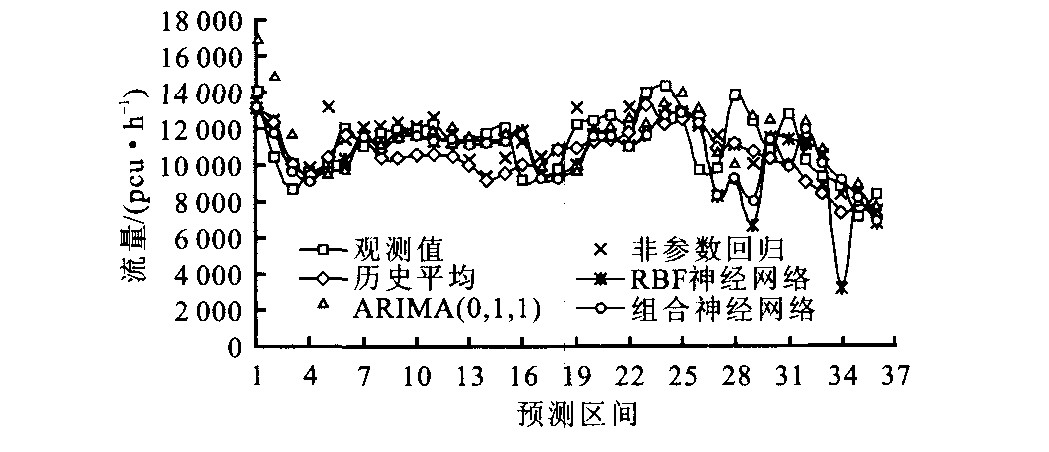
图 2 预测值与真实值对比
Figure 2. Comparison of observed traffic flow and predicted traffic flow
表 1 误差均值和误差分布概率比较
Table 1. Comparison of MAPE and PPE
模型 EMAPE/% EPPE 历史平均 12.47 0.69 ARIMA (0, 1, 1) 14.87 0.65 非参数回归 11.54 0.71 RBF神经网络 11.06 0.75 组合神经网络 10.20 0.80  下载: 导出CSV
下载: 导出CSV
表 2 应用比较
Table 2. Application comparison
模型 优点 弱项 历史平均 操作简单易行 无法表现交通流变化 ARIMA (0, 1, 1) 时间序列过程的应用 很难处理数据有空缺的情形 非参数回归 无需假定变量关系 对近邻状态的定义不易掌握 RBF神经网络 适合于复杂、非线性关系的描述 “黑盒子”的系统结构 组合神经网络 实时跟踪、自适应调整预测性能 需调试训练多个模型
下载: 导出CSV
-
[1] Ben-Akiva M, Koutsopoulos H N, Mukundan A. A dynamic traffic model system for ATMS/ATIS operations[J]. IVHS Journal, 1994, 2 (1): 1-19. [2] CheslowM, Hatcher S G, Patel VM. An initial evaluation of alternative intelligent vehicle highway systems architecture[R]. MITRE Report 92w0000063, MITRE Corporation, 1992. [3] Davis G A, Nihan N L. Nonparametric regression and short term freeway traffic forecasting[J]. Journal of Transportation Engineering, 1991, 117(2): 178-188. doi: 10.1061/(ASCE)0733-947X(1991)117:2(178) [4] BoxG E P, JenkinsGM. Time series analysis: forecasting and control [R]. San Francisco: Holden-Day, 1977. [5] Kalman R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering, 1960, 82(1): 35-45. doi: 10.1115/1.3662552 [6] Okutani I, Stephanedes Y J. Dynamic prediction of traffic volume through Kalman filtering theory[J]. Transportation Research, Part B, 1984, 18(1): 1-11. doi: 10.1016/0191-2615(84)90002-X [7] Altman NS. An introduction to kernel and nearest-neighbor nonparametric regression[J]. The American Statistician, 1992, 46(3): 175-185. [8] Dougherty MS. A review of neural networks applied to transport[J]. Transportation Research, Part C, 1995, 3(4): 247-260. [9] Zhang H J, Ritchie S G, Lo Z P. Macroscopic modeling of freeway traffic using an artificial neural network[J]. Transportation Research Record, 1997, 1588: 110-119. doi: 10.3141/1588-14 [10] Faghri A, Hua J. Evaluation of artificial neural network applications in transportation engineering[J]. Transportation Research Record, 1992, 1358: 71-80. [11] Dougherty M S, Kirby H C. The use of neural networks to recognize and predict traffic congestion[J]. Traffic Engineering and Control, 1993, 34(6): 311-314. [12] Park B, Messer C J, Urbanik T. Shortterm freeway traffic volume forecasting using radial basis function neural network[J]. Transportation Research Record, 1998, 1651: 39-47. doi: 10.3141/1651-06 [13] Abdulhai B, Porwal H, Recker W. Short-term freeway traffic flow prediction using genetically-optimized time-delay-based neural networks [R]. Institute of Transportation Studies, University of California, 1998. [14] Dia H. An object-oriented neural network approach to short-term traffic forecasting[J]. European Journal of Operational Research, 2001, 131(2): 253-261. doi: 10.1016/S0377-2217(00)00125-9 [15] Van D V, Dougherty M, Watson S. Combining kohonen maps with ARIMA time series models to forecast traffic flow[J]. Transportation Research, Part C, 1996, 4(5): 307-318. [16] Park D, Rilett L R. Forecasting multiple-period freeway link travel times using modular neural networks[J]. Transportation Research Record, 1998, 1617: 163-170. doi: 10.3141/1617-23 [17] Lee D, Zheng W, Shi Q. Short-term freeway traffic flow prediction using a combined neural network model[A]. The 83rd Annual Meeting of TRB[C]. Washington D C: TRB, 2004. -

 点击查看大图
点击查看大图

图(2) / 表(2)
计量
- 文章访问数: 420
- HTML全文浏览量: 285
- PDF下载量: 801
- 被引次数: 0
