

Heading measure system of differential digital magnetic compass and gyro
Article Text (Baidu Translation)
-
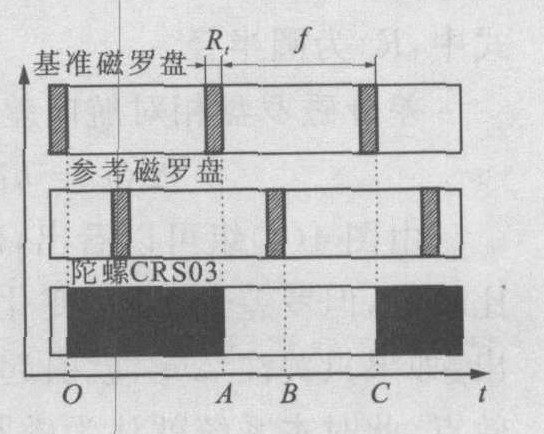
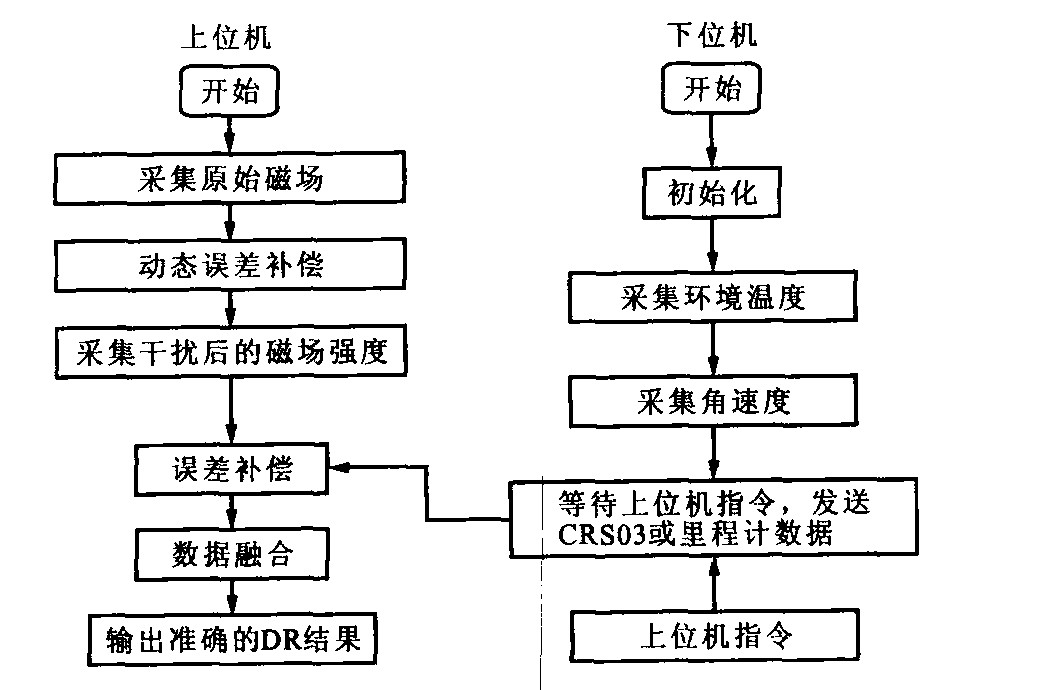
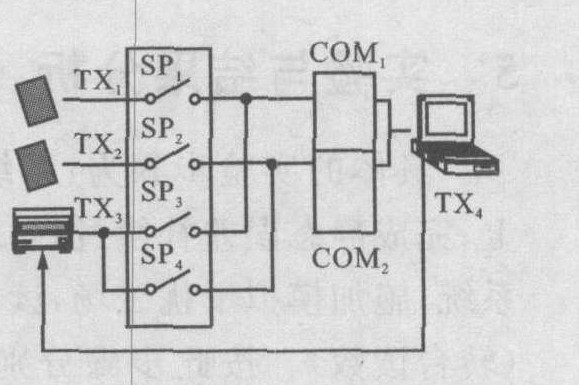
摘要: 提出了差分磁罗盘概念, 分析了其用于动态罗差识别时的可行性。以C8051F005为核心, 组建了方案验证所需的差分磁罗盘与速率陀螺实验系统。实验结果表明, 在识别率大于50%, 错误率小于15%前提下, 动态罗差识别精度为8~10, 说明差分磁罗盘能有效提高系统对动态罗差的识别率与在组合系统数据融合算法中磁罗盘测量信息的可信度。Abstract: This paper defined DDMC (differential digital magnetic compass), built up this system based on C8051F005, introduced its software and hardware design, discussed its communication circuit. The identification precision of the system is 8°~10°, while identification rate is above 50%, error is below 15%. The test results indicate that DDMC can raise the identification rate for dynamic compass error, and settle magnetic compass reliability in the assembled system.
-
Key words:
- traffic information engineering /
- DDMC /
- gyro /
- heading measure /
- error compensation
-
表 1 分析结果
Table 1. Analysis result
Tm/mT 20 10 6 4 TΔRh/(°) 0 8 0 6 0 4 0 3 WP/% 21.5 44.2 12.8 24.4 7.3 20.3 5.7 17.4 RP/% 92.2 93.7 77.4 81.6 63.1 68.6 46.9 59.1 MP/% 18.9 48.8 9.3 38.1 4.1 16.8 3.2 13.9  下载: 导出CSV
下载: 导出CSV
-
[1] 富立, 范耀祖. 智能航迹推算系统的研究[J]. 航空学报, 2000, 21(4): 300-302. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200004002.htmFULi, FAN Yao-zu. Investigation of intelligent dead reckoning system [J]. Journal of Aeronautics, 2000, 21(4): 300-302. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200004002.htm [2] 高鹏, 富立, 范耀祖. GPS/DR/MM汽车定位导航系统[J]. 北京航空航天大学学报, 2002, 28(6): 699-702.GAO Peng, FULi, FAN Yao-zu. GPS/DR/MMvehicles navigation and location system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2002, 28(6): 699-702. (in Chinese) [3] 房建成, 万德均. GPS组合导航系统在车辆导航中的应用[J]. 东南大学学报, 1996, 26(3): 96-102. https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX603.018.htmFANG Jian-cheng, WANDe-jun. Application of GPS integrated navigation system in the vehicle monitoring. [J]. Journal of Southeast University, 1996, 26(3): 96-102. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX603.018.htm [4] Robert L. Giant magnetoresistance: a primer[J]. IEEE Transactions, 1992, 28(5): 2 482-2 487. [5] 刘诗斌. 微型智能磁航向系统研究[D]. 西安: 西北工业大学, 2001. [6] Juang J, HuangGuo-shing. DevelopmentofGPS-based attitude determination algorithms[J]. IEEE Transctions, 1997, 33(3): 1 482-1487. -


 点击查看大图
点击查看大图
图(4) / 表(1)
计量
- 文章访问数: 405
- HTML全文浏览量: 159
- PDF下载量: 306
- 被引次数: 0
