

Multi-layers and multi-objects fuzzy optimization model of main target ship
Article Text (Baidu Translation)
-
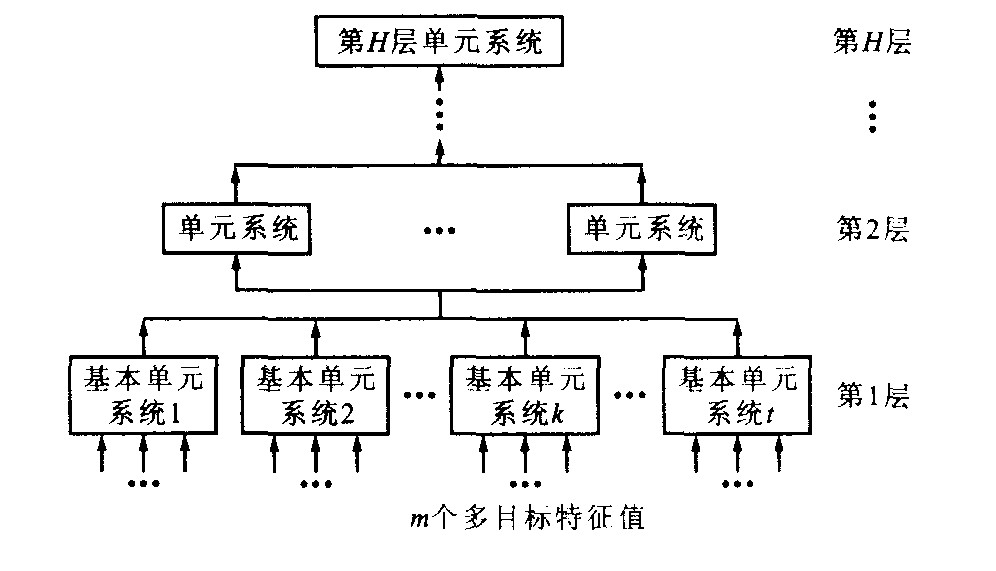
摘要: 为解决船舶避碰自动化领域的多船智能避碰决策问题, 建立了多层次多目标重点避让船模糊优选模型。分析了碰撞危险度和避让难易程度对重点避让船决策的影响, 通过划分相互关联的有序层次结构使问题条理化, 利用多目标模糊优选理论, 建立了相应的模糊优选模型, 以低层次的输出作为高层次的输入, 对每一层次的单元系统进行优化计算, 利用相对优属度向量进行排序, 确定重点避让船。模拟计算了一艘船同时和7艘目标船相遇时重点避让船相对优属度向量, 按相对优属度越大排序越前的原则确定目标船3为重点避让船, 决策结果正确, 该模型可行。Abstract: To solve the problem of intelligential decision-making on multi-ships collision avoidance in the field of automatic collision avoidance, a multi-layers and multi-objects fuzzy optimization model of main target ship was designed. The collision risk degree and the difficulty degree of collision avoidance on judging main target ship were studied, the objects were separated into interrelated parts to make the problem consecutive, the model was established using fuzzy optimization theory, every layer cell system was calculated by inputting the output of lower layer into higher layer. Using pricing vectors, the sequence of all target ships was arranged, the optimal selection for main target ship was performed. The pricing vectors were calculated while own ship encounters with seven target ships at the same time. Computation results show that the tactic sequence of all target ships and the selected main target ship are conforming more exactly to practical forecast result, the model is feasible.
-
Key words:
- traffic safety /
- collision avoidance /
- multi-objects /
- multi-layers /
- fuzzy optimization /
- main target ship
-
表 1 评价指标原始数据
Table 1. Original data of evaluation indices
目标船 目标船参数 评价指标原始数据 航向/(°) 航速/kn 方位/(°) 距离/n mile x1/n mile x2/min x3/n mile x4/n mile x5 TS1 0 12.0 0 4 0 60.0 4 0.75 1.333 TS2 185 16.0 0 5 0.2 9.4 5 0.55 1.000 TS3 180 14.0 0 6 0 12.0 6 0.75 1.143 TS4 175 16.0 0 7 -0.3 13.1 7 1.05 1.000 TS5 320 15.0 60 5 0.4 28.1 5 0.95 1.067 TS6 320 13.5 60 6 -0.3 34.7 6 1.05 1.185 TS7 335 20.0 100 6 0.4 41.2 6 0.35 0.800  下载: 导出CSV
下载: 导出CSV
-
[1] 杨宝璋, 石爱国, 蔡烽, 等. 舰船避碰自动化系统[J]. 海军工程大学学报, 2001, 13(4): 57-66. https://www.cnki.com.cn/Article/CJFDTOTAL-HJGX200104012.htmYANG Bao-zhang, SHI Ai-guo, CAI Feng, et al. Automatic collision avoidance system(ACAS)[J]. Journal of Naval University of Engineering, 2001, 13(4): 57-66. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HJGX200104012.htm [2] 郑忠义, 吴兆麟. 船舶碰撞危险度的新模型[J]. 大连海事大学学报, 2002, 28(2): 1-5. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS200202000.htmZHENG Zhong-yi, WU Zhao-lin. New model of collision risk between vessels[J]. Journal of Dalian Maritime University, 2002, 28(2): 1-5. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS200202000.htm [3] 朱晓琳, 许汉珍. 基于自适应模糊系统的船舶碰撞危险评判[J]. 中国航海, 2000, 47(2): 50-55. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH200002009.htmZHU Xiao-lin, XU Han-zhen. Risk assessment of ship collision based on adaptive fuzzy system[J]. Navigation of China, 2000, 47(2): 50-55. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH200002009.htm [4] WUZhao-Lin. An alternative system of collision avoidance[J]. The Journal of Navigation, 1984, 37(1): 83-89. [5] 陈守煜. 系统模糊决策理论与应用[M]. 大连: 大连理工大学出版社, 1994. -


 点击查看大图
点击查看大图
图(2) / 表(1)
计量
- 文章访问数: 313
- HTML全文浏览量: 102
- PDF下载量: 281
- 被引次数: 0
