

Model of pedestrians crossing time at signalized intersection
-
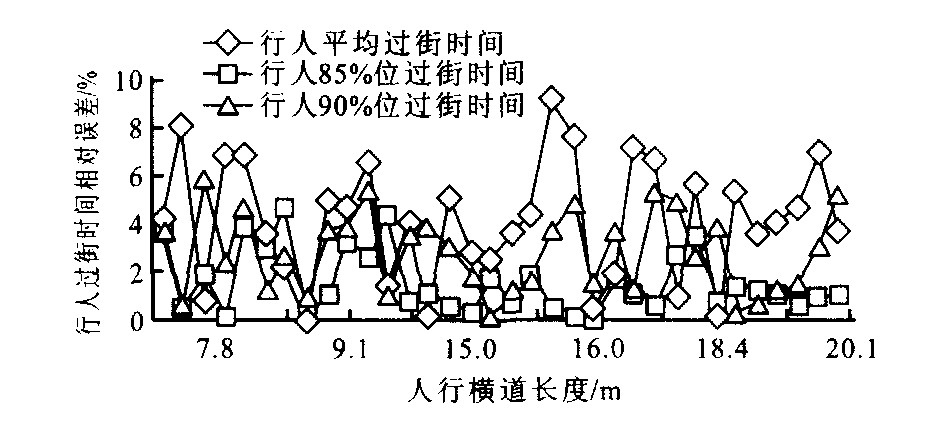
摘要: 为了分析交叉口处左转及右转机动车对行人过街交通的干扰和影响, 合理控制交叉口行人过街信号, 应用交通流冲突理论、间隙接受理论, 推导了行人穿越机动车道的人数及等待通行人数, 应用统计学方法, 建立了行人过街时间模型。实例分析表明, 行人平均过街时间的绝对误差及相对误差平均值分别为0.452 7 s和4.15%, 85%行人过街时间的绝对误差及相对误差平均值分别为0.206 5 s和1.57%, 90%行人过街时间的绝对误差及相对误差平均值分别为0.401 2 s和2 84%, 模型计算精度满足要求, 有利于行人专用信号相位的设置。Abstract: In order to analyze the influence of turning vehicles on pedestrians crossing time, and to provide rational pedestrians control signal, the pedestrians number of crossing and waiting-crossing crosswalk were calculated, by using the conflict theory and the critical-gap accepted theory the models of pedestrians crossing time were built up. The absolute error and relative error of pedestrians crossing average time, are respectively 0.452 7 s and 4.15%, the absolute error and relative error of 85% pedestrians crossing average time are respectively 0.206 5 s and 1.57%; the absolute error and relative error of 90% pedestrians crossing average time are respectively 0.401 2 s and 2.84%. Computation results show that the precision of the models is high, the models are feasible for the pedestrians phase setting at signalized intersection.
-
Key words:
- traffic control /
- signalized intersection /
- pedestrians crossing time /
- conflict /
- crossing gap /
- headway
-

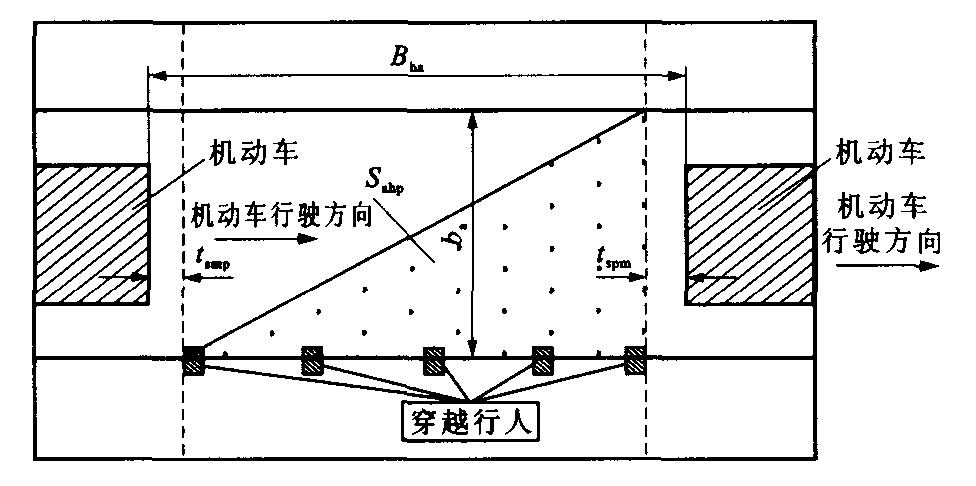
图 2 穿越转向机动车流的行人人数估算
Figure 2. Estimating value of pedestrians crossing turning vehicle flow

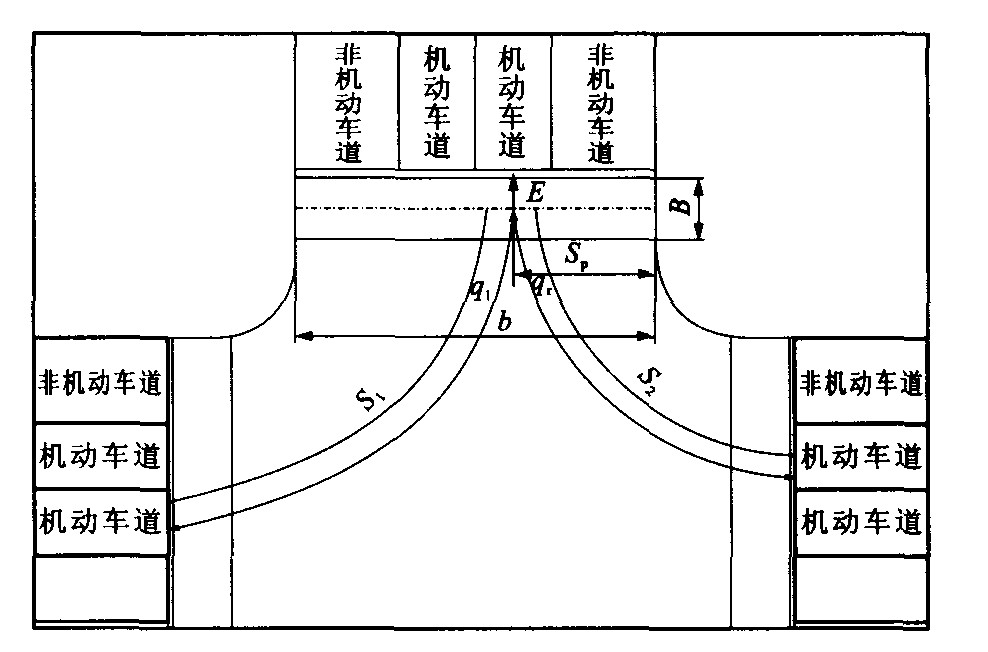
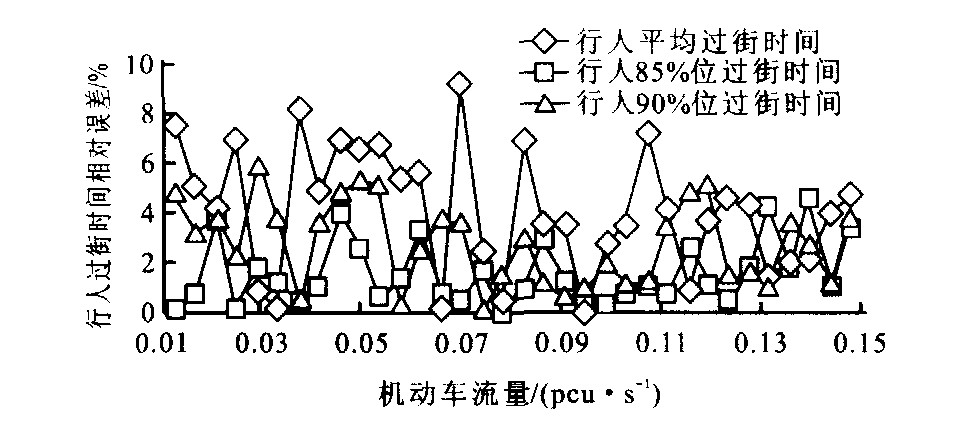
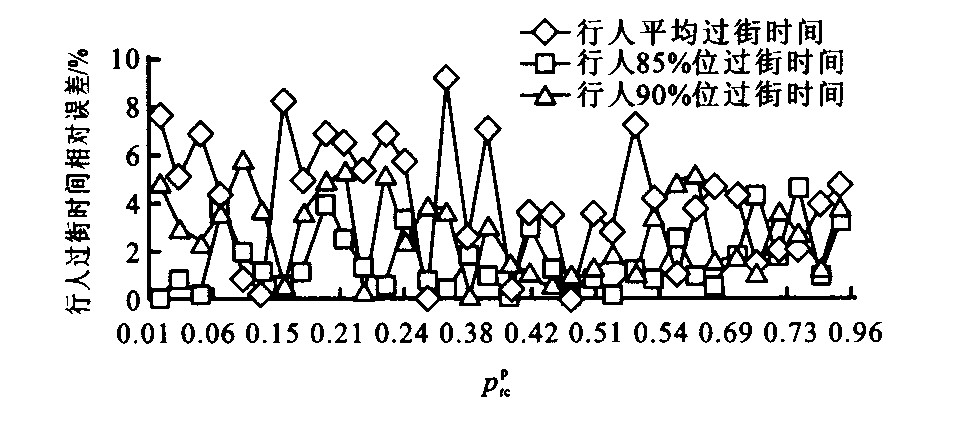
图 3 双向两车道转向机动车对行人影响
Figure 3. Fig.3 Effect of turning vehicles on pedestrians attwo lanes intersection

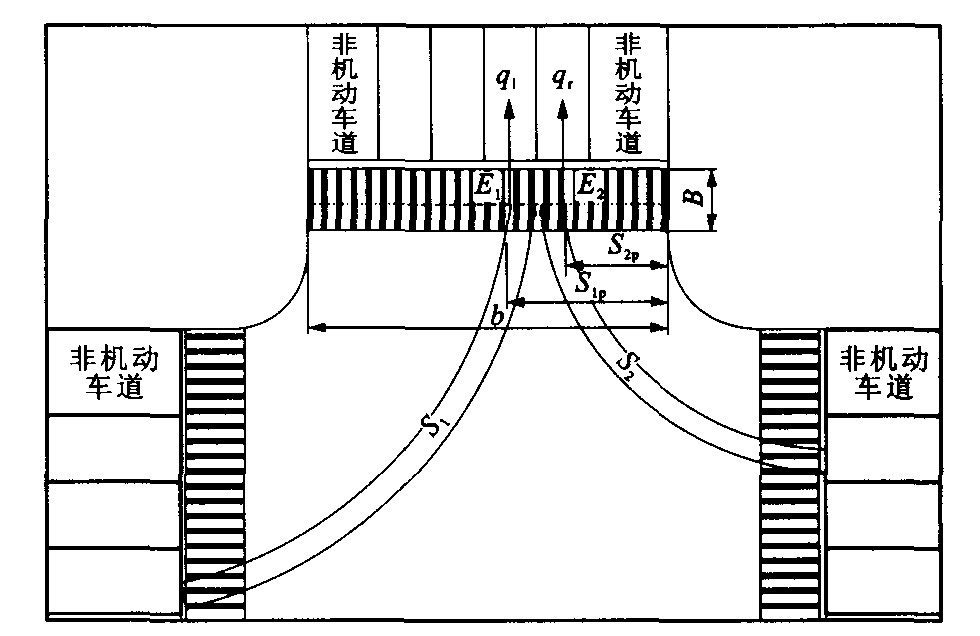
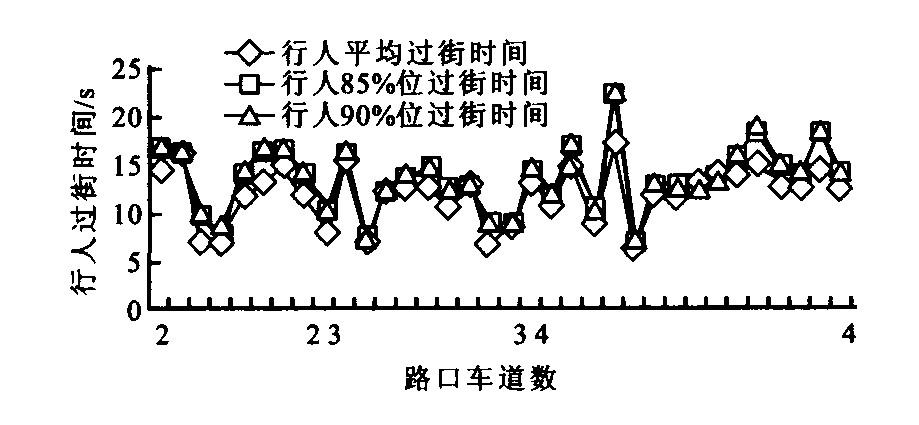
图 4 双向四车道转向机动车对行人影响
Figure 4. Fig.4 Effect of turning vehicles on pedestriansat four lanes intersection
表 1 车头时距分布选择方法
Table 1. Choice methods of headway distribution
信号相位饱和度Cs 车辆到达规律 车头时距分布f (thd) 0.5~0.6 Poisson随机到达 负指数分布 0.6~0.7 非拥挤状况下的自由交通流 对数正态分布、PearsonⅢ型分布和Erlang分布 0.7~0.8 自由流和非自由流 移位负指数分布、对数正态分布 0.8~0.9 拥挤状况下的非自由流 移位负指数分布、对数正态分布  下载: 导出CSV
下载: 导出CSV
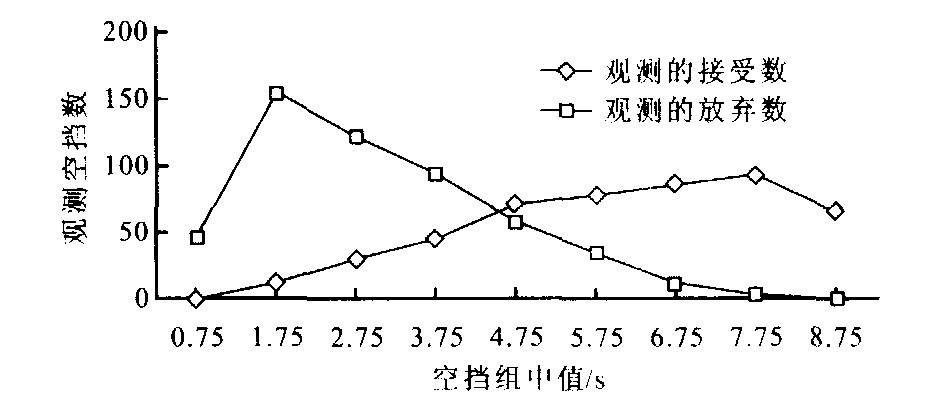
表 2 穿越间隙观测值
Table 2. Survey data of crossing gap
1 2 3 4 穿越间隙时间分组/s 放弃的观测数 接受的观测数 观测的接受百分比 0.25~1.25 46 0 0 1.25~2.25 153 11 7 2.25~3.25 122 29 19 3.25~4.25 94 44 32 4.25~5.25 58 71 55 5.25~6.25 35 78 69 6.25~7.25 11 86 89 7.25~8.25 3 93 97 8.25~9.25 0 66 100
下载: 导出CSV
-
[1] 刘小明, 段海林. 平面交叉口交通冲突技术标准化研究[J]. 公路交通科技, 1997, 17(3): 49-53. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK703.005.htmLIU Xiao-ming, DUAN Hai-lin. Research on standard program of traffic conflict techniques at intersections[J]. Journal of Highway and Transportation Research and Development, 1997, 17(3): 49-53. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK703.005.htm [2] 徐立群, 吴聪, 杨兆升. 信号交叉口通行能力计算方法[J]. 交通运输工程学报, 2001, 1(1): 82-85. http://transport.chd.edu.cn/article/id/200101021XU Li-qun, WU Cong, YANG Zhao-sheng. The methods of computing the capacity of signalized intersection[J]. Journal of Traffic and Transportation Engineering, 2001, 1(1): 82-85. (in Chinese) http://transport.chd.edu.cn/article/id/200101021 [3] 黄文忠, 杨佩昆. 无控制人行横道处的行人和机动车延误分析[J]. 同济大学学报, 1995, 23(1): 31-36. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ501.007.htmHUANG Wen-zhong, YANG Pei-kun. Delays of pedestrians and vehicles at the nonsignalized zebra crossing[J]. Journal of Tongji University, 1995, 23(1): 31-36. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ501.007.htm [4] 马万经, 林瑜, 杨晓光. 多相位信号控制交叉口行人相位设置方法[J]. 交通运输工程学报, 2004, 4(2): 103-106. http://transport.chd.edu.cn/article/id/200402024MA Wan-jing, LIN Yu, YANG Xiao-guang. Design method of pedestrian phases at multi-phase signal intersection[J]. Journal of Traffic and Transportation Engineering, 2004, 4(2): 103-106. (in Chinese) http://transport.chd.edu.cn/article/id/200402024 [5] 高海军, 陈龙, 石松泉. 交通路口混合交通流的分布式模糊控制[J]. 中国公路学报, 2003, 16(4): 67-71. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200304015.htmGAO Hai-jun, CHEN Long, SHI Song-quan. Distributed fuzzy control under hybrid traffic flow of a traffic intersection[J]. China Journal of Highway and Transport, 2003, 16(4): 67-71. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200304015.htm [6] 徐珺, 皱智军, 杨锦冬. 中小城市道路平交交通设计[J]. 长安大学学报(自然科学版), 2003, 23(4): 58-61. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200304015.htmXU Jun, ZOU Zhi-jun, YANG Jin-dong. At-grade intersection design in medium or small urban[J]. Journal of Chang'an University(Natural Science Edition), 2003, 23(4): 58-61. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200304015.htm -

 点击查看大图
点击查看大图
计量
- 文章访问数: 330
- HTML全文浏览量: 109
- PDF下载量: 247
- 被引次数: 0
