

Closed-loop control of turbine engine system in super deep operation condition
Article Text (Baidu Translation)
-
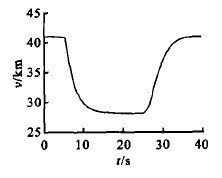
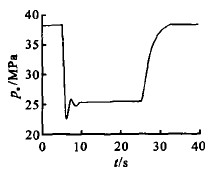
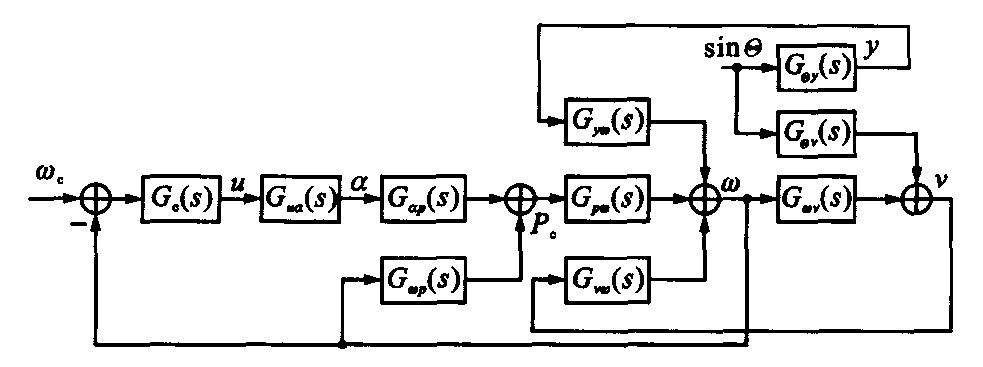
摘要: 开式循环涡轮发动机系统由于其高工作性能、便于实现而在高速自主式水下航行器中得到广泛应用, 但是该系统在大排气压强、低速运行时呈现出不稳定特性, 使得控制系统的设计变得困难。为此建立了超大航深涡轮发动机系统的闭环控制数学模型, 充分利用系统执行结构以及燃烧室压强的小惯性特征, 以针对推进剂秒耗量进行控制律的设计取代通常的针对变量燃料泵排量的控制律设计。仿真结果表明闭环控制系统响应无超调, 上升时间小于8s, 控制品质良好, 控制算法简单, 主要参数可变动幅度为30%, 鲁棒性强, 控制系统整定容易, 便于工程应用。Abstract: Open-loop thermal cycle turbine engine system is very fit for modern high speed autonomous under water vehicle(AUV) because of its good operation performance and simple system structure, but this power system can't keep its stability when it works in the condition of ultrahigh drain pressure and low speed, such a behavior makes the design of control system difficult. In this paper, the closed-loop control model of turbine engine system working in super deep operation condition was built, utilizing the slight inertia characteristics of executing machine and combustion chamber pressure, the control law of adjusting propellant flow was devised instead of the usual control law of adjusting capacity of variable capacity fuel pump. The respondence of the system is no overshoot in changing speed process, its rising time is less than 8 s, the dominating control parameters are allowed to change over 30%. Simulation results show that this control algorithm is simple and robust, the control system be regulated easily, its control quality is good.
-
Key words:
- marine engineering /
- turbine engine /
- closed-loop control /
- drain pressure /
- instability /
- changing speed control
-
[1] Osborne G F. The spearfish propulsion system[J]. GEC Review, 1998, 13(3): 150-162. [2] 赵寅生. 鱼雷涡轮机原理[M]. 西安: 西北工业大学出版社, 1995. [3] 罗凯, 党建军, 王育才. 水下热动力推进系统的变结构控制[J]. 内燃机学报, 2003, 21(6): 458-460. https://www.cnki.com.cn/Article/CJFDTOTAL-NRJX200306015.htmLuo Kai, Dang Jian-jun, Wang Yu-cai. Variable structure control of underwater heat engine propeller system[J]. Transactions of CSICE, 2003, 21(6): 458-460. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NRJX200306015.htm [4] Annaswamy A M, Aziz A. An adaptive control for aerospace vehicles[R]. AIAA-92-4413-CP. [5] Bakker R, Annaswamy A M. Low-order multivariable adaptive control with application to flexible structures[J]. Automatic, 1993, 32(3), 409-418. [6] 任俊生, 杨盐生. 基于输出反馈H∞算法的高速水翼船姿态控制[J]. 交通运输工程学报, 2005, 5(1): 45-48. http://transport.chd.edu.cn/article/id/200501011Ren Jun-sheng, Yang Yan-sheng. Controller design of hydrofoil catamaran with dynamical output-feedback H∞ scheme[J]. Journal of Traffic and Transportation Engineering, 2005, 5(1): 45-48. (in Chinese) http://transport.chd.edu.cn/article/id/200501011 [7] Cheng Kai-pong. Fuzzy system tuned PI controller for a benchmark drum-boiler model[A]. Proceedings of the 37th IEEE Conference on Decision and Control Tampa[C]. IEEE, 1998. [8] Huang Chang-sun. Comparison of fuzzy and PI controllers for a benchmark drum-boiler model[A]. Proceedings of 1998 IEEE International Conference on Control Applications[C]. IEEE, 1998. -

 下载:
下载:
 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 251
- HTML全文浏览量: 128
- PDF下载量: 223
- 被引次数: 0
