

Optimal conflict resolution method based on inner-point restriction
Article Text (Baidu Translation)
-
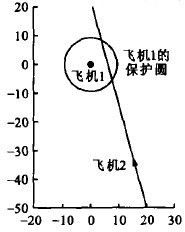
摘要: 在自由飞行中, 为了保证任何两架飞机之间的距离不能小于给定的安全间隔, 采用内点约束条件和最优控制中的庞特里亚金极小值原理, 研究了自由飞行中飞机的控制向量受约束时的平面冲突解脱问题, 考虑了只改变速度大小和只改变速度方向的解脱策略。不同的策略具有不同的控制变量, 各变量有不同的约束范围。采用极小值原理解得最优控制变量, 并由内点约束条件获得解脱开始时间、约束时间及控制变量转换时间。计算结果表明改变速度大小策略的协作解脱耗费是单机解脱的1/10, 而改变速度方向的策略在两机夹角过小时单机解脱耗费为协作解脱的1/3。Abstract: In the condition of free flight, in order to ensure the distance of two aircrafts could not less than a given safety distance, the Pontryagin minimum principle(PMP) of optimal control theory and inner-point restriction condition were introduced to study the conflict resolution problem of free flight aircrafts, in which control vectors were restricted. Two different schemes were designed, one only changed flying velocity magnitude, the other only changed flying velocity angle. Different schemes had different control vectors, different control vectors had different restricted ranges. The optimal control variable was gained according to the PMP, the start time, end time and switch time of conflict resolution were obtained by inner-point restriction condition. An example shows that the method is feasible, the wasting cost of one aircraft resolution is tenfold of the wasting cast of two aircrafts resolution in changing velocity method, the wasting cost of one aircraft resolution is one third of the wasting cast of two aircrafts resolution in changing angle method when the intersectant angle of two aircrafts is smaller.
-
Key words:
- air traffic control /
- free flight /
- conflict resolution /
- optimal control /
- inner-point restriction
-
表 1 不同解脱方式结果比较
Table 1. Results comparison of different resolution method's
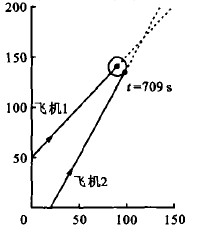
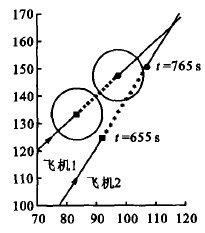
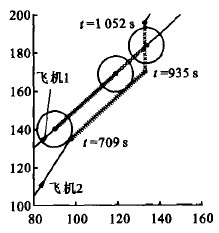
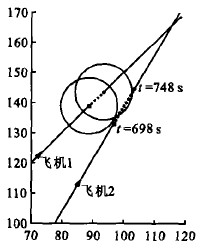
解脱方式 性能指标 飞机2单机解脱 速度v为控制变量 t=671 s时, 减速到0.13 km/s; t=923 s时, 恢复到0.22 km/s ΔT=103 s, ΔW=-1 390.57 kg, L=-280.441 $ t=655 s时, 加速到0.27 km/s; t=765 s时, 恢复到0.22 km/s ΔT=-25 s, ΔW=611.58 kg, L=128.488 $ 角度θ为控制变量 t=473 s时, 改变方向角为π/2;t=793 s时, 改变方向角为π/6;t=1 113 s时, 回到原航线恢复原状态 ΔT=86 s, ΔW=78.42 kg, L=39.104 $ t=709 s时, 改变方向角为π/4;t=935 s时, 改变方向角为π/2;t=1 052 s时, 回到原航线恢复原状态 ΔT=24 s, ΔW=21.88 kg, L=10.913 $ 2架飞机协作解脱 速度v为控制变量 t=698 s时, 飞机2加速到0.27 km/s, 飞机1减速到0.13 km/s; t=748 s时, 恢复原状态 ΔT1=14 s, ΔT2=-12 s, ΔW1=-273.94 kg, ΔW2=290.56 kg, L1=-56.841 $, L2=67.102 $, L=10.261 $ 角度θ为控制变量 t=709 s时, 飞机1改变方向角为5π/12, 飞机2改变方向角为π/6;t=842 s时, 飞机1改变方向角为π/12, 飞机2改变方向角为π/2;t=975 s时, 回到原航线恢复原状态 ΔT1=37 s, ΔT2 =35 s, ΔW1=337.39 kg, ΔW2 =26.19 kg, L1=16.824 $, L2=14.656 $, L=31.480 $  下载: 导出CSV
下载: 导出CSV
-
[1] Lucia P, Eric M F, Antonio B. Conflict resolution problems for air traffic management system solved with mixed integer programming[J]. IEEE Transactions on Intelligent Transportation System, 2002, 3(1): 3-11. doi: 10.1109/6979.994791 [2] Claire T, George J P, Shankar S. Conflict resolution for air traffic management: a study in multiagent hybrid systems[J]. IEEE Transactions on Automatic Control, 1998, 43(4): 509-521. doi: 10.1109/9.664154 [3] Menon P K, Sweriduk G D, Sridhar B. Optimal strategies for free-flight air traffic conflict resolution[J]. Journal of Guidance, Control and Dynamics, 1999, 22(2): 202-211. [4] 靳学梅, 韩松臣, 孙樊荣. 自由飞行中冲突解脱的线性规划法[J]. 交通运输工程学报, 2003, 3(2): 75-79. http://transport.chd.edu.cn/article/id/200302028Jin Xue-mei, Han Song-chen, Sun Fan-rong. Conflict resolution in free flight with linear programming[J]. Journal of Traffic and Transportation Engineering, 2003, 3(2): 75-79. (in Chinese) http://transport.chd.edu.cn/article/id/200302028 [5] Antonio B, Lucia P. On optimal cooperative conflict resolution for air traffic management systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2000, 1(4): 221-231. [6] Jimmy K, Mark P. Conflict detection and resolution for free flight [J]. Air Traffic Control Quarterly, 1997, 5(3): 181-212. [7] 胡寿松, 王执铨, 胡维礼. 最优控制理论与系统[M]. 南京: 东南大学出版社, 1995. [8] 傅职忠. 飞行计划与装载配平[M]. 北京: 中国三峡出版社, 2003. -


 点击查看大图
点击查看大图

图(7) / 表(1)
计量
- 文章访问数: 270
- HTML全文浏览量: 107
- PDF下载量: 318
- 被引次数: 0
