

Active control of pantograph vertical vibration of tilting train
Article Text (Baidu Translation)
-
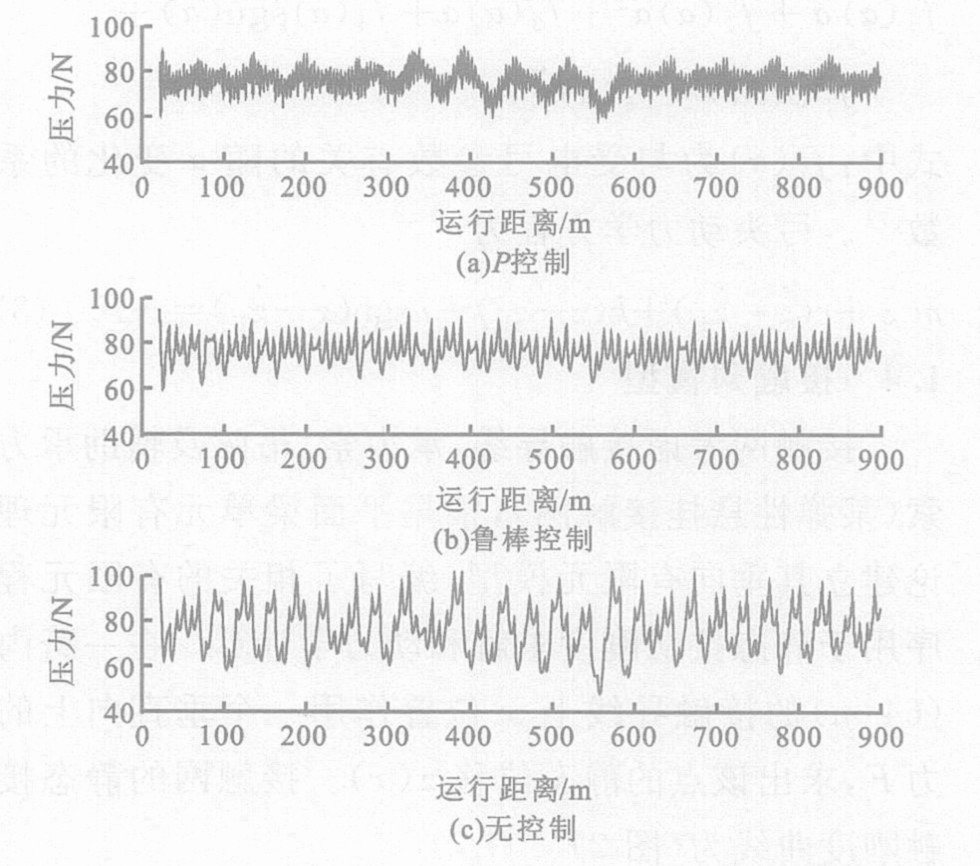
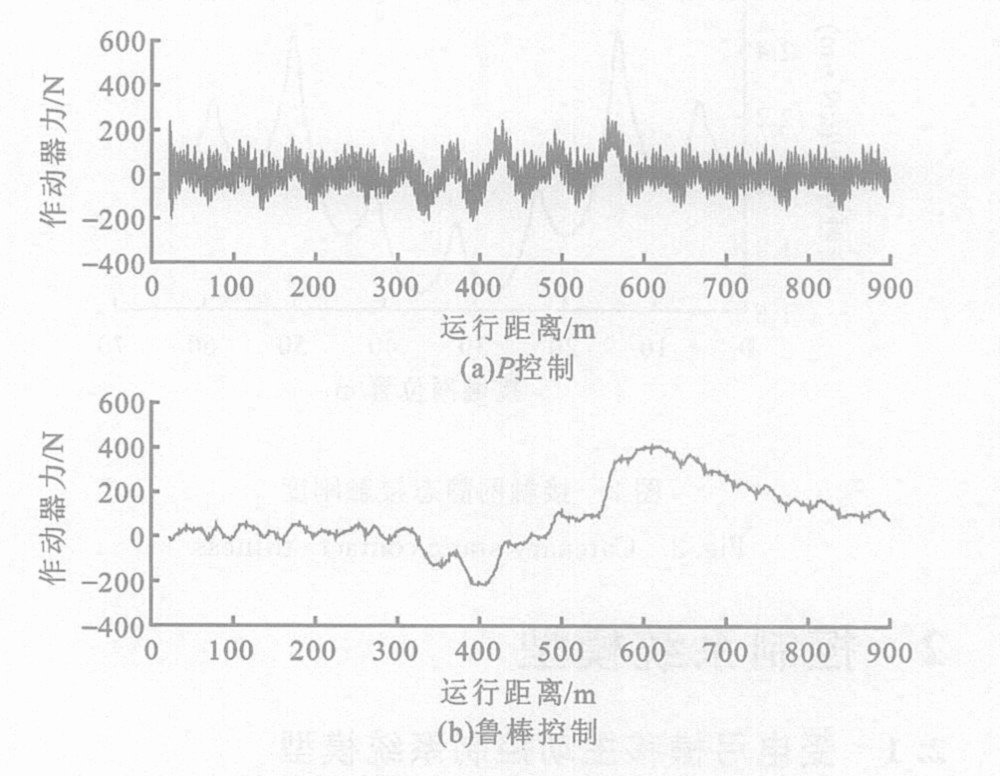
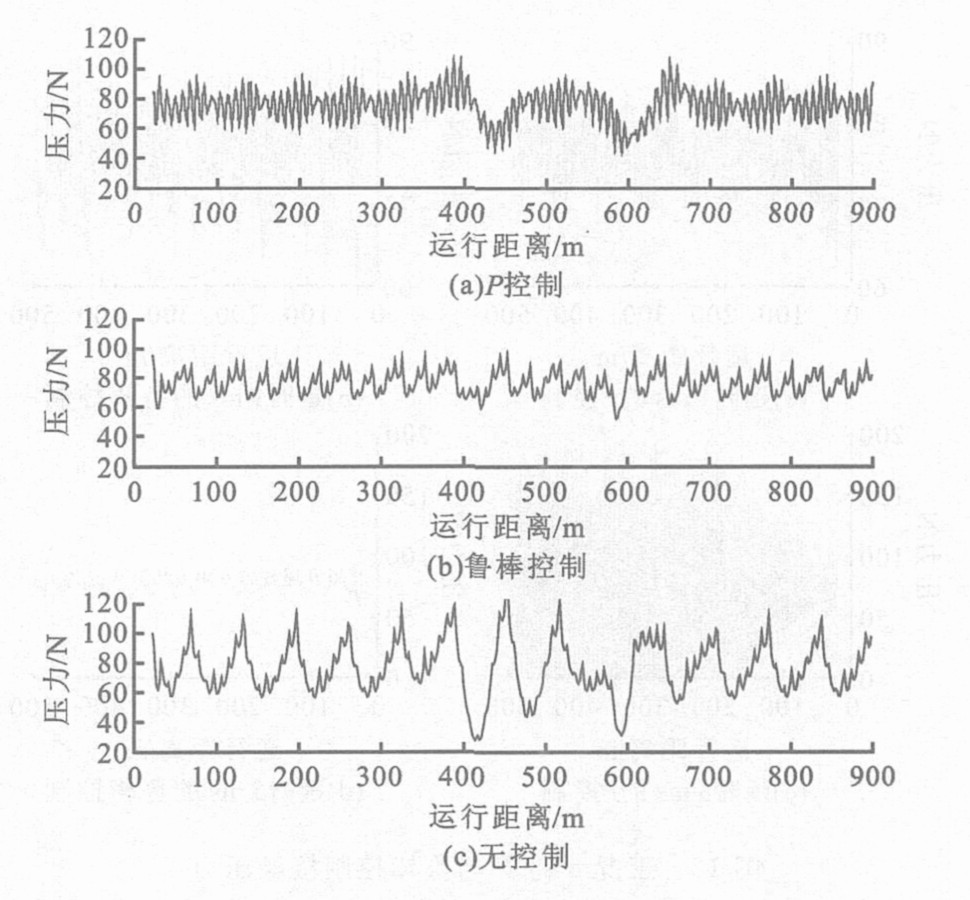
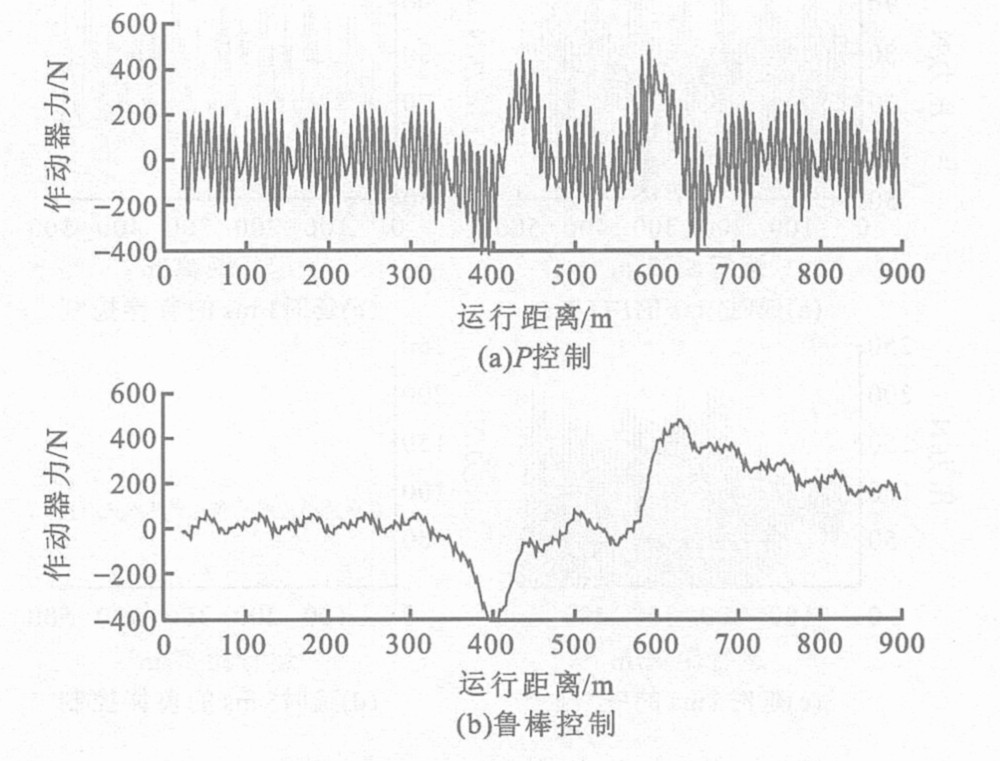
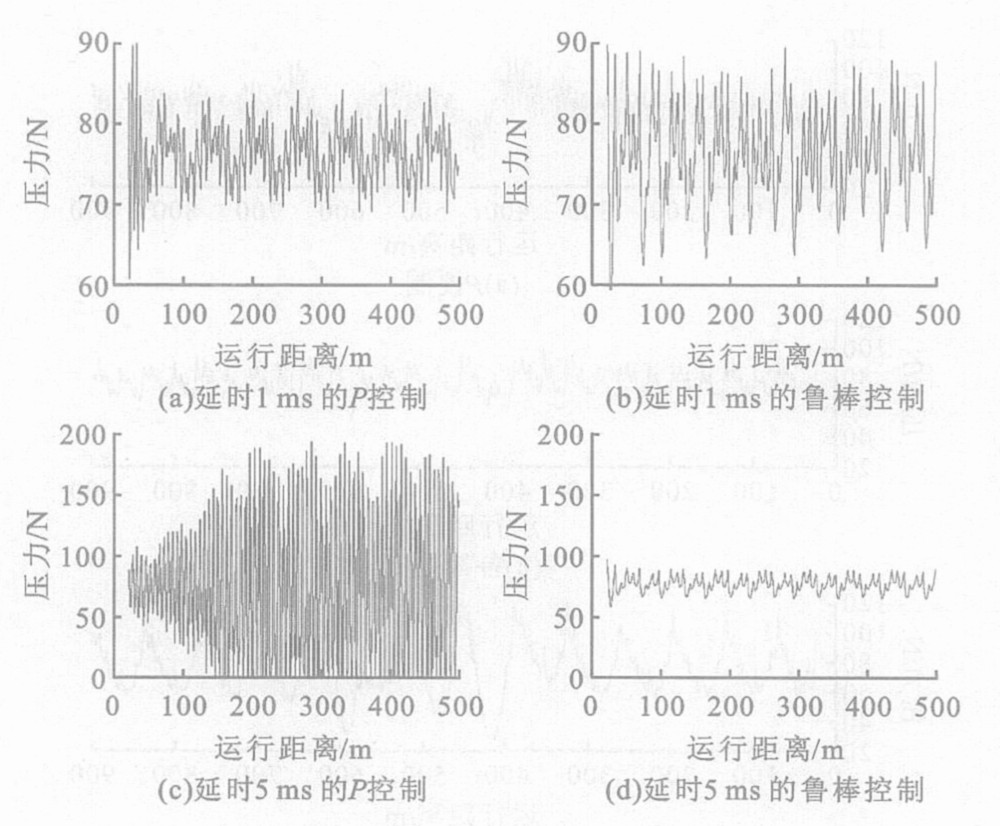
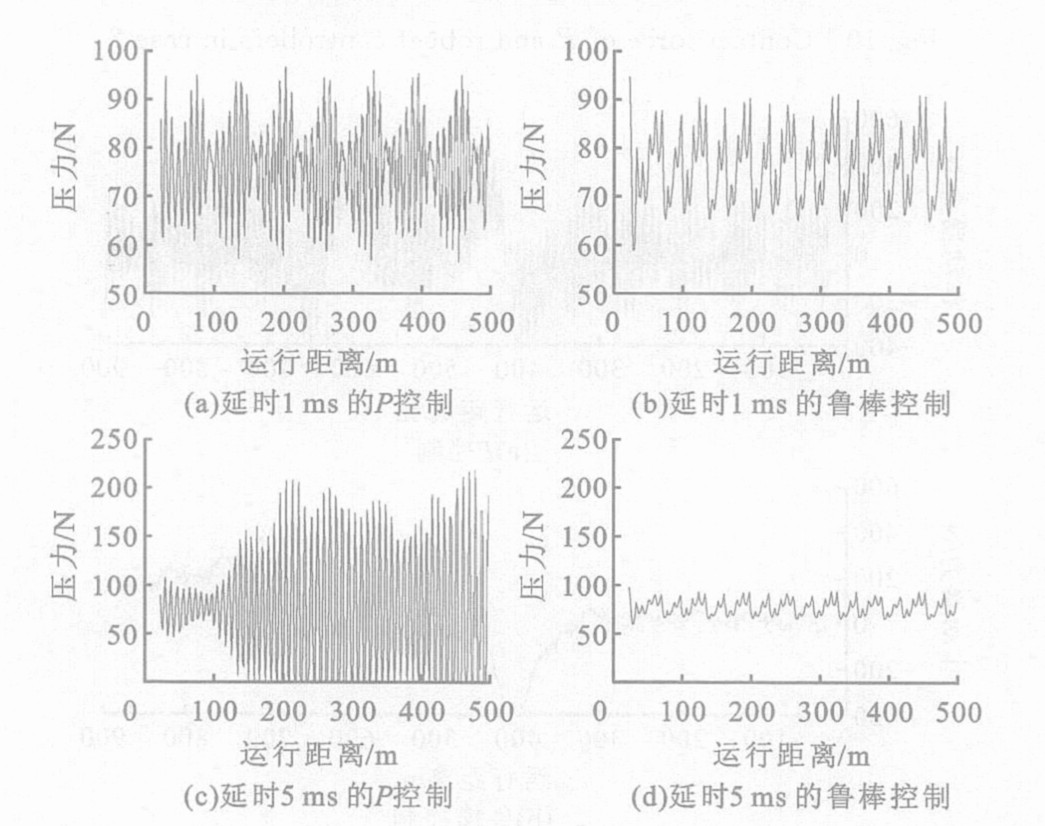
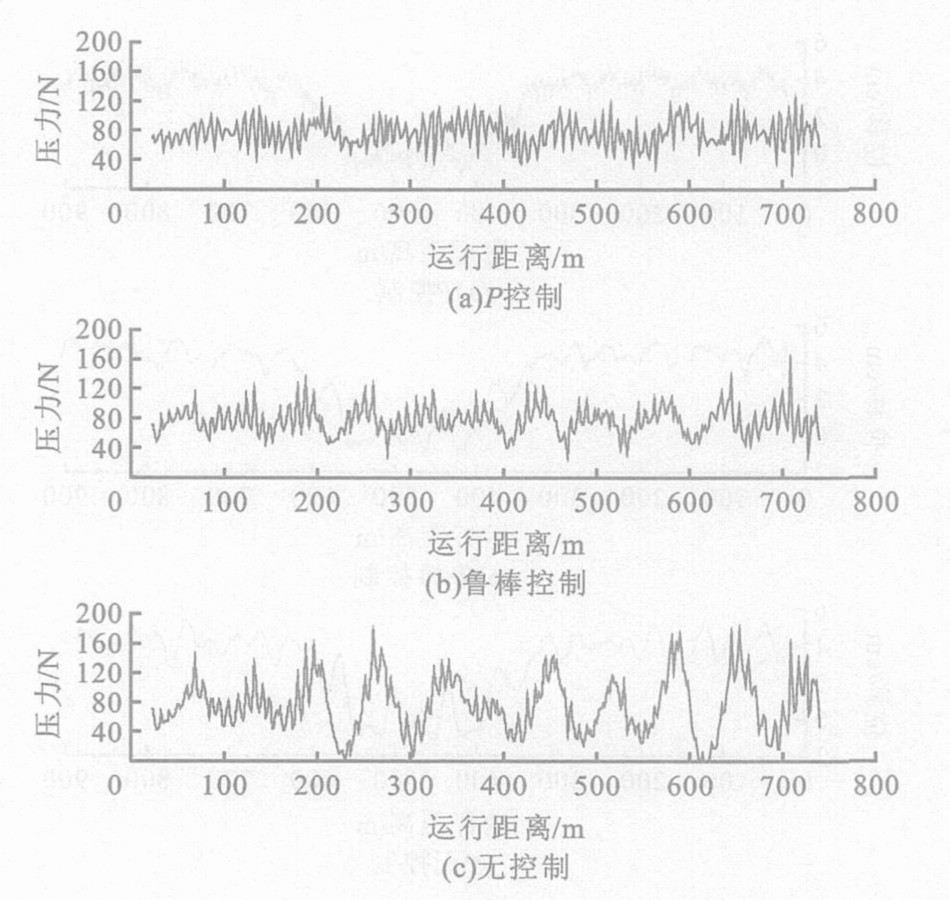
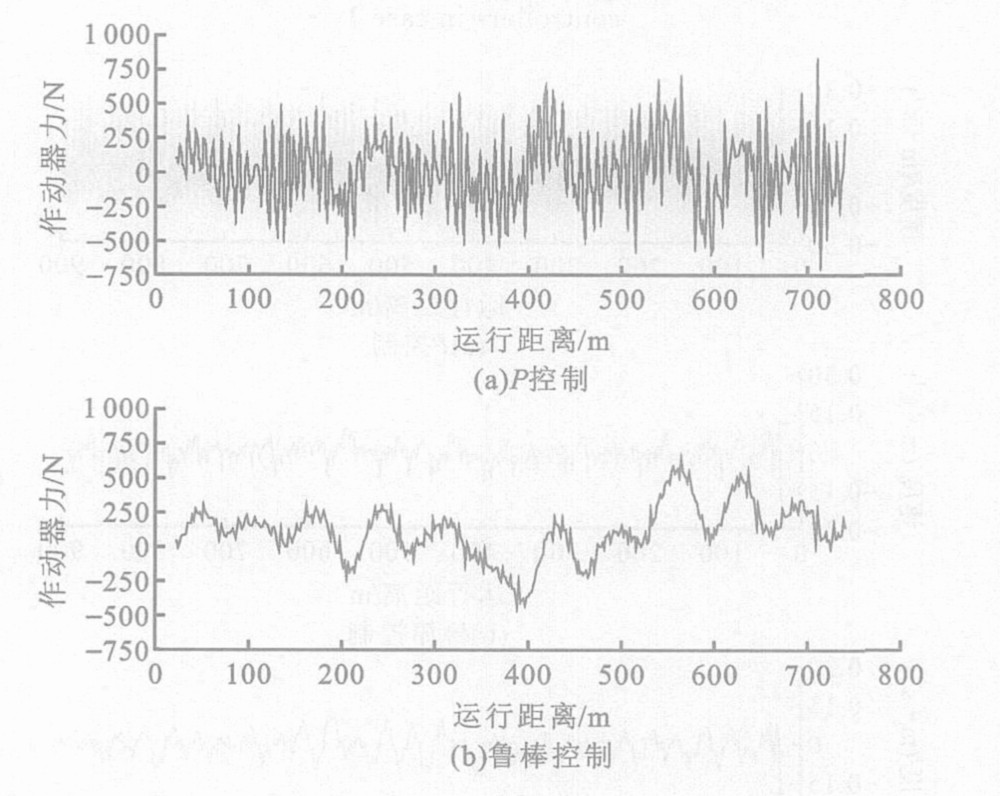
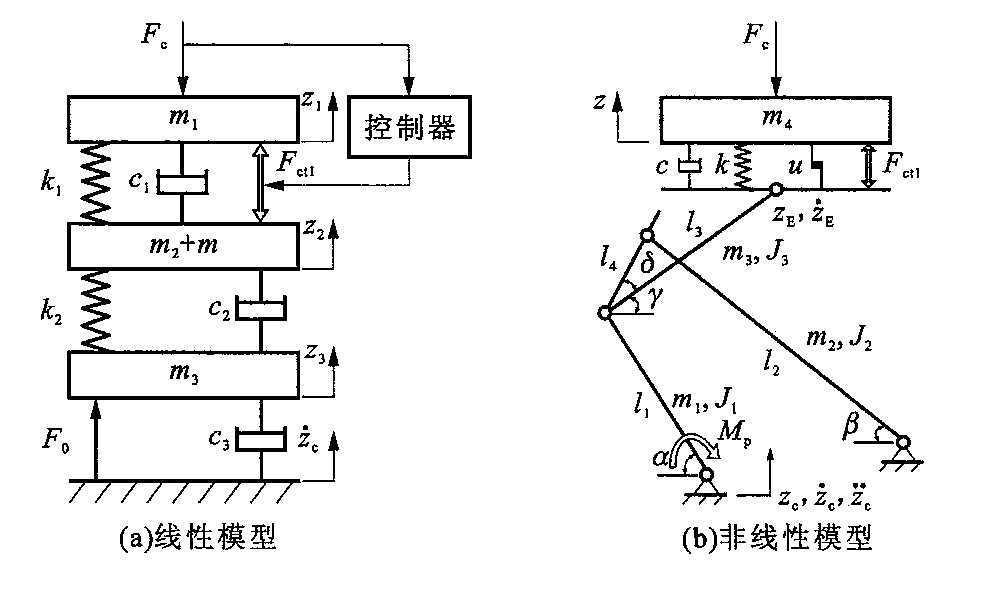
摘要: 建立了摆式列车机电耦合动力学模型、受电弓线性和非线性动力学模型及接触网有限元模型和静态接触刚度模型, 组成摆式列车-受电弓-接触网耦合动力学模型, 分别设计了P和H∞鲁棒控制器, 应用数值仿真方法, 研究了摆式列车直线和曲线通过时两种控制器对摆式列车受电弓垂向主动控制的效果。结果表明受电弓若无垂向控制, 其弓网接触压力波动较大; P和H∞鲁棒控制均能减小弓网接触压力的波动; 控制延时对P控制比对H∞鲁棒控制的影响大; 是否考虑接触网的振动对接触压力影响较大, 对控制效果影响不大。这说明摆式列车受电弓垂向主动控制能明显改善弓网接触压力波动; H∞鲁棒控制比P控制效果更好; 接触网的静态接触刚度模型可用于受电弓主动控制的定性分析。Abstract: In order to study the active control of pantograph vertical vibration, the mechanical-electric coupled nonlinear dynamics model of tilting train was set up, the linear model and nonlinear model for pantograph were constructed respectively, the finite element model and static contact stiffness model of the catenary were developed, the models were coupled together to constitute the tilting train-pantograph-catenary dynamics system. The P controller and H∞ robust controller were designed, the dynamic behavior of pantograph with P and H∞ robust controllers was studied by numerical simulation method. Numerical simulation result shows that the contact force between pantograph and catenary fluctuates heavily during curving negotiation when without pantograph vertical control, the fluctuation of the contact force can be reduced evidently if active vertical control is used, H∞ controller has better control performance than P controller when the time delay of the control system is taken into account, the catenary vibration!influences the contact force, but the controllers work well too.
-
Key words:
- tilting train /
- pantograph /
- active control /
- dynamics simulation
-

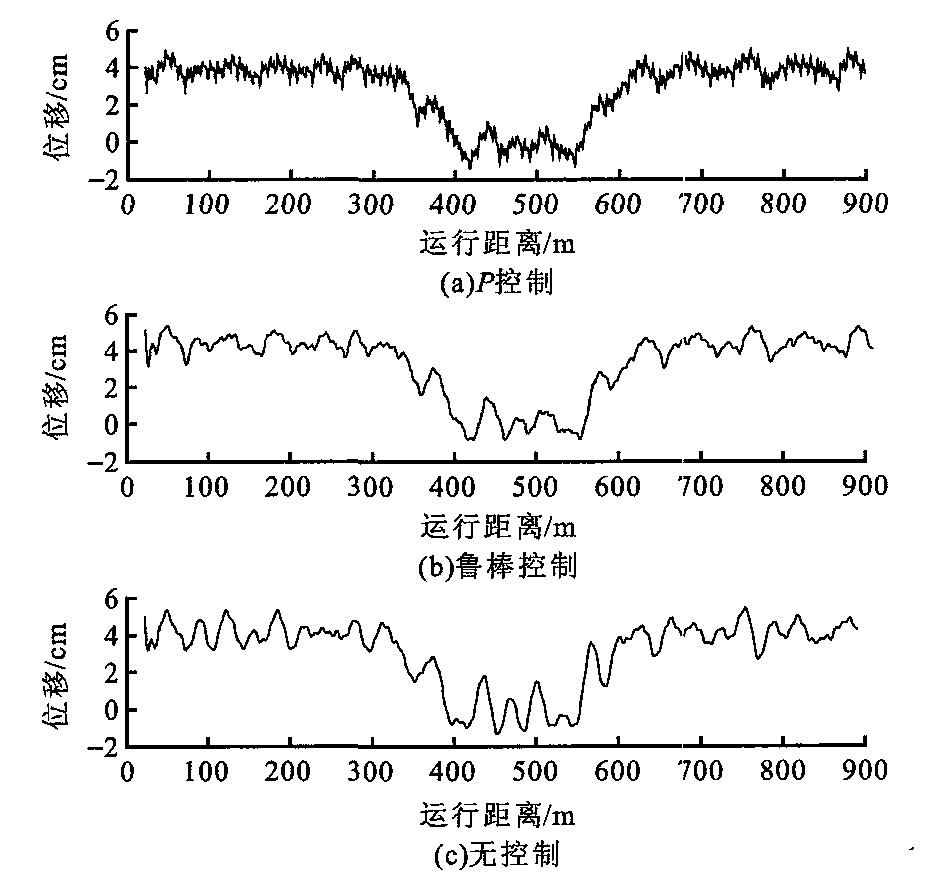
图 8 工况1的P与鲁棒控制弓头位移
Figure 8. Pantograph head displacement of P and robust controllers in case 1

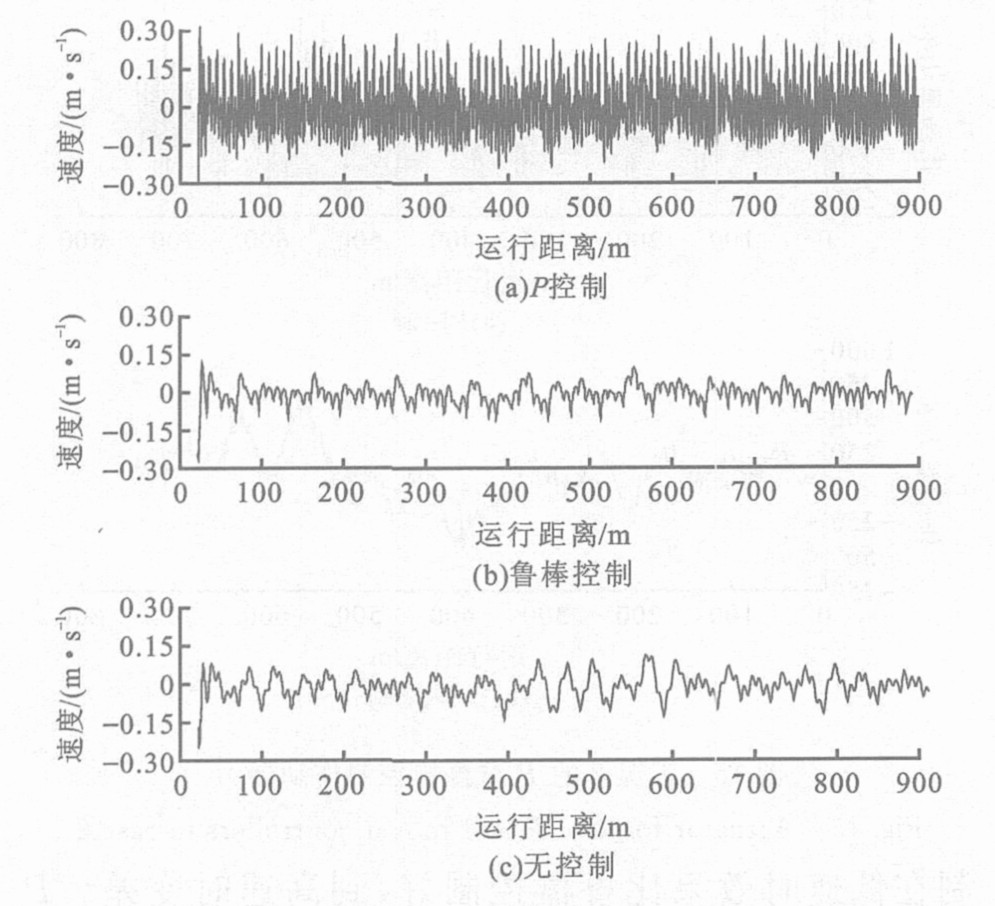
图 9 工况1的P与鲁棒控制弓头速度
Figure 9. Pantograph head velocity of P and robust controllers in case 1
-
[1] 刘宏友, 曾京, 邬平波. 摆式列车曲线通过动力学研究[J]. 铁道学报, 2001, 23(5): 22-26. doi: 10.3321/j.issn:1001-8360.2001.05.005Liu Hong-you, Zeng Jing, Wu Ping-bo. Study on curving behavior for tilting passenger car[J]. Journal of the China Railway Society, 2001, 23(5): 22-26. (in Chinese) doi: 10.3321/j.issn:1001-8360.2001.05.005 [2] 刘荣. 摆式列车伺服系统控制设计[D]. 成都: 西南交通大学, 2000. [3] 张宇明. 摆式列车倾摆控制信号的实时检测与处理[D]. 成都: 西南交通大学, 2002. [4] 杨名利, 张汉全. 摆式列车的H∞鲁棒控制研究[J]. 铁道学报, 1999, 21(1): 19-22. doi: 10.3321/j.issn:1001-8360.1999.01.004Yang Ming-li, Zhang Han-quan. Research on robust H∞ control to tilting train[J]. Journal of the China Railway Society, 1999, 21(1): 19-22. (in Chinese) doi: 10.3321/j.issn:1001-8360.1999.01.004 [5] Cheli F, Diana G, Resta F. Numerical model of a tilting body railway vehicle compared with rig and on track tests[J]. Vehicle System Dynamics, 2001, 35(6): 417-442. doi: 10.1076/vesd.35.6.417.2041 [6] 蔡成标, 翟婉明. 高速铁路受电弓-接触网系统动态性能仿真研究[J]. 铁道学报, 1997, 19(5): 38-43. doi: 10.3321/j.issn:1001-8360.1997.05.007Cai Cheng-biao, Zhai Wan-ming. Study on simulation of dynamic performance of pantograpcatenary system at high speed railway[J]. Journal of the China Railway Society, 1997, 19(5): 38-43. (in Chinese) doi: 10.3321/j.issn:1001-8360.1997.05.007 [7] 梅桂明, 张卫华. 受电弓接触网系统动力学模型及特性[J]. 交通运输工程学报, 2002, 2(1): 21-25. http://transport.chd.edu.cn/article/id/200201004Mei Gui-ming, Zhang Wei-hua. Dynamic model and behavior of pantograph/centary system[J]. Journal of Traffic and Transportation Engineering, 2002, 2(1): 21-25. (in Chinese) http://transport.chd.edu.cn/article/id/200201004 [8] 郭京波, 杨绍普, 高国生. 高速机车主动控制受电弓研究[J]. 铁道学报, 2004, 26(4): 41-45. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200404009.htmGuo Jing-bo, Yang Shao-pu, Gao Guo-sheng. Study on active control of high-speed-train pantograph[J]. Journal of the China Railway Society, 2004, 26(4): 41-45. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200404009.htm [9] 刘红娇. 受电弓机构几何参数优化与主动控制的研究[D]. 成都: 西南交通大学, 2002. [10] 曾京, 邬平波. 高速列车的稳定性[J]. 交通运输工程学报, 2005, 5(2): 1-4. http://transport.chd.edu.cn/article/id/200502001Zeng Jing, Wu Ping-bo. Stability of high-speed train[J]. Journal of Traffic and Transportation Engineering, 2005, 5(2): 1-4. (in Chinese) http://transport.chd.edu.cn/article/id/200502001 [11] 任俊生, 杨盐生. 基于输出反馈H∞算法的高速水翼船姿态控制[J]. 交通运输工程学报, 2005, 5(1): 45-48. http://transport.chd.edu.cn/article/id/200501011Ren Jun-sheng, Yang Yan-sheng. Controller design of hydrofoil catamaran with dynamical output-feedback H∞ scheme[J]. Journal of Traffic and Transportation Engineering, 2005, 5(1): 45-48. (in Chinese) http://transport.chd.edu.cn/article/id/200501011 -

 下载:
下载:
 点击查看大图
点击查看大图
图(15)
计量
- 文章访问数: 558
- HTML全文浏览量: 190
- PDF下载量: 669
- 被引次数: 0
