

Asymmetric information theory and nonlinear backstepping robust control algorithm of ship navigation
Article Text (Baidu Translation)
-
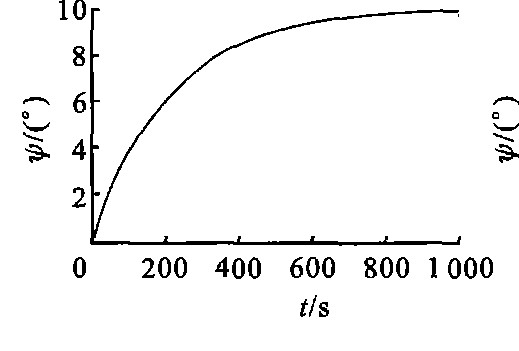
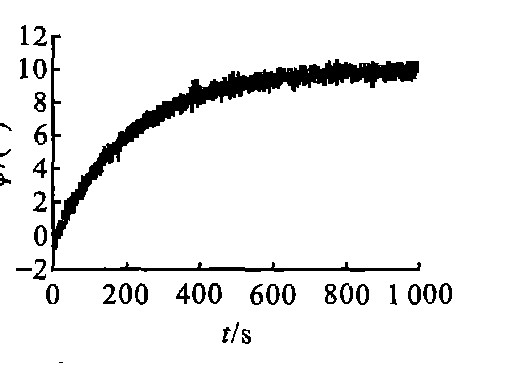
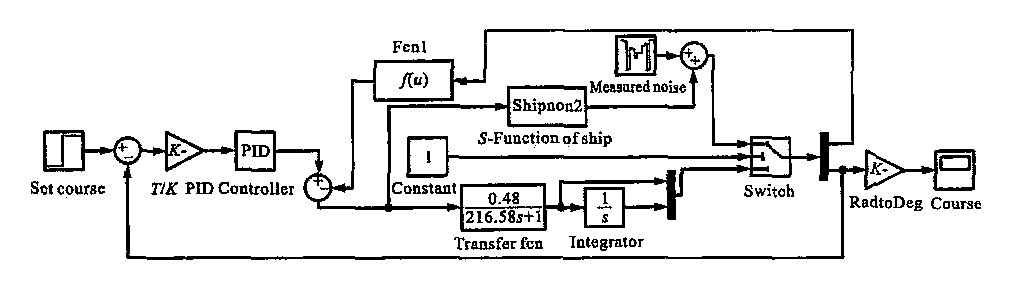
摘要: 应用不对称信息理论和鲁棒控制算法简化非线性逆推算法, 针对非线性船舶航向保持系统, 设计了其Backstepping逆推控制器, 由非线性函数项和常规线性控制器组成, 将简化的Back-stepping法与闭环增益成形算法相结合, 设计其非线性鲁棒控制器。通过非线性鲁棒控制器的控制能够使船舶无超调、无静差地跟踪设定航向, 调节时间为600 s, 符合船舶航行的实际情况, 控制效果良好; 当系统增加干扰后, 系统的控制输出除了因干扰产生的抖动外, 其跟踪性能仍然较好, 航向输出无静差, 说明控制器具有一定的鲁棒性; 是否全部对消非线性项, 对其控制效果相差不大, 说明当模型发生参数摄动时, 系统的控制性能仍能保证。Abstract: For a nonlinear course keeping system of ships, asymmetric information theory and robust control algorithm were applied to simplify nonlinear backstepping algorithm, through the algorithm, the controller was converted into nonlinear items plus a normal linear control item, and a simplified nonlinear robust control algorithm was presented, which connected the backstepping algorithm with closed-loop gain shaping algorithm. Simulation result shows that the ship can keep the set course without overshoot and steady state error, the regulating time is 600 s, these control indexes accord with the actual condition of ship navigation, and the course keeping performance is improved. When wind and wave disturbances are introduced into the system, the control effects are satisfied, the output course does not have steady state error, the controller has good robustness. The control effect does not vary obviously whether the nonlinear items are cancelled or not, the control performance is guaranteed.
-
Key words:
- traffic control /
- ship navigation /
- asymmetric information theory /
- backstepping algorithm /
- nonlinear /
- robustness /
- course keeping
-
[1] Zhang Xian-ku, Jia Xin-le, Wang Xing-cheng. A kind of transfigured loop shaping controller and its application[J]. Automatic Control and Computer Sciences, 2001, 35(4): 20-25. [2] Krstic M, Kanellakopoulos I, Kokotovic P V. Nonlinear and Adaptive Control Design[M]. New York: Wiley, 1995. [3] Zhang Xian-ku, Jia Xin-le. Simplification of H∞mixed sensitivity algorithm and its application[J]. Automatic Control and Computer Sciences, 2002, 36(3): 28-33. [4] 张显库, 贾欣乐. 求PID参数新方法[J]. 系统工程与电子技术, 2000, 22(8): 4-5. doi: 10.3321/j.issn:1001-506X.2000.08.002Zhang Xian-ku, Jia Xin-le. A new method for solving PID parameters[J]. Systems Engineering and Electronics, 2000, 22(8): 4-5. (in Chinese) doi: 10.3321/j.issn:1001-506X.2000.08.002 [5] 张显库, 贾欣乐. 用闭环增益成形算法的精馏塔鲁棒控制[J]. 系统工程与电子技术, 2001, 23(5): 15-18. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200105005.htmZhang Xian-ku, Jia Xin-le. Robust control of a high purity distillation column using closed-loop gain shaping algorithm[J]. Systems Engineering and Electronics, 2001, 23(5): 15-18. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200105005.htm [6] 张显库, 张丽坤, 贾欣乐. 非方阵被控对象闭环增益成形算法及其应用[J]. 大连海事大学学报, 2001, 27(2): 63-67. doi: 10.3969/j.issn.1006-7736.2001.02.015Zhang Xian-ku, Zhang Li-kun, Jia Xin-le. Closed-loop gain shaping algorithm with unsquare matrix plant and its application[J]. Journal of Dalian Maritime University, 2001, 27(2): 63-67. (in Chinese) doi: 10.3969/j.issn.1006-7736.2001.02.015 [7] 张显库, 贾欣乐, 刘川. 响应型船舶运动数学模型的构造[J]. 大连海事大学学报, 2004, 30(1): 18-21. doi: 10.3969/j.issn.1006-7736.2004.01.005Zhang Xian-ku, Jia Xin-le, Liu Chuan. Research on responding ship motion mathematical model[J]. Journal of Dalian Maritime University, 2004, 30(1): 18-21. (in Chinese) doi: 10.3969/j.issn.1006-7736.2004.01.005 [8] 杜佳璐, 郭晨, 李如铁. 基于逆推算法的非线性船舶航向跟踪控制器[J]. 大连海事大学学报, 2004, 30(2): 8-11. doi: 10.3969/j.issn.1006-7736.2004.02.003Du Jia-lu, Guo Chen, Li Ru-tie. Backstepping algorithm based nonlinear ship steering controller[J]. Journal of Dalian Maritime University, 2004, 30(2): 8-11. (in Chinese) doi: 10.3969/j.issn.1006-7736.2004.02.003 [9] 杨盐生. 船舶运动控制研究[J]. 交通运输工程学报, 2003, 3(2): 34-39. doi: 10.3321/j.issn:1671-1637.2003.02.008Yang Yan-sheng. Review on ship motion control[J]. Journal of Traffic and Transportation Engineering, 2003, 3(2): 34-39. (in Chinese) doi: 10.3321/j.issn:1671-1637.2003.02.008 [10] 张显库, 肖惟楚, 郭晨. 船舶进出港低速航向保持[J]. 交通运输工程学报, 2005, 5(4): 77-81. http://transport.chd.edu.cn/article/id/200504016Zhang Xian-ku, Xiao Wei-chu, Guo Chen. Course-keeping of inward-and-outward low speed ship[J]. Journal of Traffic and Transportation Engineering, 2005, 5(4): 77-81. (in Chinese) http://transport.chd.edu.cn/article/id/200504016 [11] 张松涛, 任光. 基于反馈线性化的船舶航向保持模糊自适应控制[J]. 交通运输工程学报, 2005, 5(4): 72-76. http://transport.chd.edu.cn/article/id/200504015Zhang Song-tao, Ren Guang. Fuzzy adaptive control for ship steering autopilot based on backstepping technique[J]. Journal of Traffic and Transportation Engineering, 2005, 5(4): 72-76. (in Chinese) http://transport.chd.edu.cn/article/id/200504015 -

 下载:
下载:

 点击查看大图
点击查看大图
图(4)
计量
- 文章访问数: 398
- HTML全文浏览量: 152
- PDF下载量: 224
- 被引次数: 0
