

GPS/DR navigation data fusion method based on Kalman filter
Article Text (Baidu Translation)
-
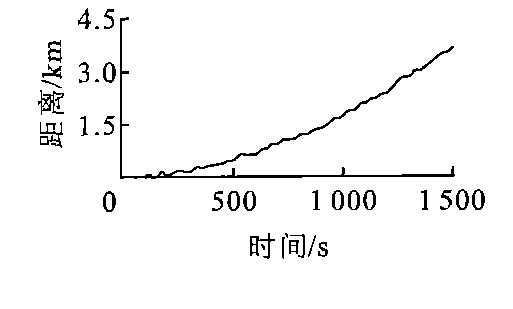
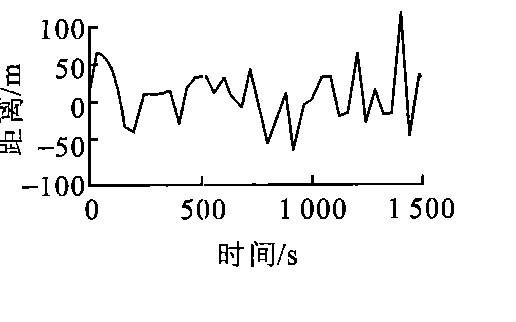
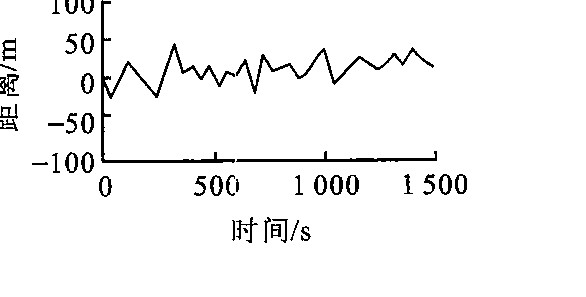
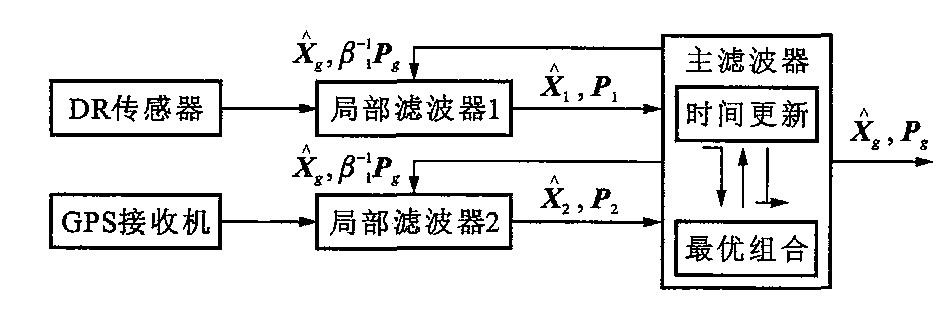
摘要: 为了有效地实现GPS/DR (Global Positioning System/Dead Reckoning) 组合导航系统的信息融合, 提高GPS/DR组合导航系统的精度和可靠性, 分析了传统的利用全球定位系统(GPS) 与航位推算系统(DR) 跟踪车辆位置方法的特点, 结合GPS和航位推算DR两种定位方式的优点, 在车辆定位技术中采用GPS/DR组合定位技术, 构建了基于卡尔曼滤波技术的自适应联合卡尔曼滤波器, 使用Matlab软件工具进行了计算机仿真验证, 从软件集成的角度探讨了GPS/DR组合定位技术的串口通信等关键技术的软件实现问题, 给出了GPS单独导航、DR单独导航和GPS/DR组合导航三种工作状态下的位置误差。从对比中可以看出, 组合系统能在任何情况下实现车辆的实时、可靠、准确的定位, 定位误差最小, 同时还可以减小甚至消除推算定位系统随时间积累的误差。
-
关键词:
- 智能交通系统 /
- 车辆定位技术 /
- GPS/DR组合定位 /
- 卡尔曼滤波
Abstract: To realize the data fusion of integrated navigation system and improve the precision and reliability of GPS/DR, the characteristics of traditional methods tracking vehicle based on GPS and DR were analyzed, the advantages of GPS and DR were studied, an adaptive joint Kalman filter based on Kalman filtering technology was set up, its computer simulation system was designed by using Matlab software. The software realization problems of serial port communication in the integrated technology for GPS/DR were discussed, the navigation positioning errors of GPS, DR and integrated GPS/DR were computed. Computation result shows that the integrated GPS/DR navigation can actualize real-time, credible and exact vehicle positioning, its positioning error is minimum, it can decrease or eliminate the reckoning positioning system error accumulated with time.-
Key words:
- ITS /
- vehicle positioning technology /
- integrated GPS/DR navigation /
- Kalman filter
-
表 1 Ke, 1与τεe变量关系
Table 1. Relation of Ke, 1andτεe
τae Ke, 1 1 000.00 0.584 1 100.00 0.584 0 0.00 0.583 4 0.10 0.601 3 0.01 0.612 2  下载: 导出CSV
下载: 导出CSV
表 2 Ke, 1与τae变量关系
Table 2. Relation of Ke, 1andτae
τae Ke, 1 1 000.0 0.279 2 100.0 0.340 0 10.0 0.409 8 1.0 0.523 0 0.1 0.566 6
下载: 导出CSV
表 3 Ke, 1与σae变量关系
Table 3. Relation of Ke, 1andσae
σae Ke, 1 1.50 0.616 9 1.00 0.560 6 0.75 0.523 6 0.40 0.453 8 0.20 0.394 4
下载: 导出CSV
-
[1] 张其善, 吴今培, 杨东凯. 智能车辆定位导航系统及应用[M]. 北京: 科技出版社, 2002. [2] 张建军, 王保保. 基于公共对象请求代理体系的智能交通系统[J]. 长安大学学报: 自然科学版, 2004, 24(2): 61-65. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200402015.htmZhang Jian-jun, Wang Bao-bao. ITS based on common object request broker architecture(CORBA)[J]. Journal of Chang'an University: Natural Science Edition, 2004, 24(2): 61-65. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200402015.htm [3] 刘卫宁, 孙棣华, 宋伟, 等. 智能交通虚拟共用信息平台研究[J]. 中国公路学报, 2004, 17(4): 79-84. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200404017.htmLiu Wei-ning, Sun Di-hua, Song Wei, et al. Study of virtual common information platform for intelligent transportation systems[J]. China Journal of Highway and Transport, 2004, 17(4): 79-84. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200404017.htm [4] 王晋国, 王卫亚, 田丰, 等. 智能导航车载系统[J]. 交通运输工程学报, 2005, 5(2): 106-109. http://transport.chd.edu.cn/article/id/200502025Wang Jin-guo, Wang Wei-ya, Tian Feng, et al. Vehicle device system of intelligent guiding[J]. Journal of Traffic and Transportation Engineering, 2005, 5(2): 106-109. (in Chinese) http://transport.chd.edu.cn/article/id/200502025 [5] 秦永元, 张洪钺, 汪叔华. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 1998. [6] 申功勋, 孙建锋. 信息融合理论在惯性/天文/GPS组合导航系统中的应用[M]. 北京: 国防工业出版社, 1998. [7] 陶俊勇, 邱静, 温熙森, 等. 自适应联合滤波模型及其在车载SINS/GPS组合导航系统中的应用[J]. 信息及控制, 2004, 20(4): 168-172. https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK200002013.htmTao Jun-yong, Qiu Jing, Wen Xi-sen, et al. Adaptive federated filter model and its application in SINS/GPS integrated navigation system for vehicle[J]. Journal of Information and Control, 2004, 20(4): 168-172. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK200002013.htm [8] 黄晓瑞, 崔平远. 基于信息融合的组合导航系统研究[J]. 数据采集与处理, 2001, 16(2): 210-214. doi: 10.3969/j.issn.1004-9037.2001.02.016Huang Xiao-rui, Cui Ping-yuan. Research of integrated navigation system[J]. Journal of Data Acquisition and Processing, 2001, 16(2): 210-214. (in Chinese) doi: 10.3969/j.issn.1004-9037.2001.02.016 -

 点击查看大图
点击查看大图
图(4) / 表(3)
计量
- 文章访问数: 381
- HTML全文浏览量: 136
- PDF下载量: 1090
- 被引次数: 0
