

Self-calibration three-dimension reconstruction model of traffic accident photographs
Article Text (Baidu Translation)
-
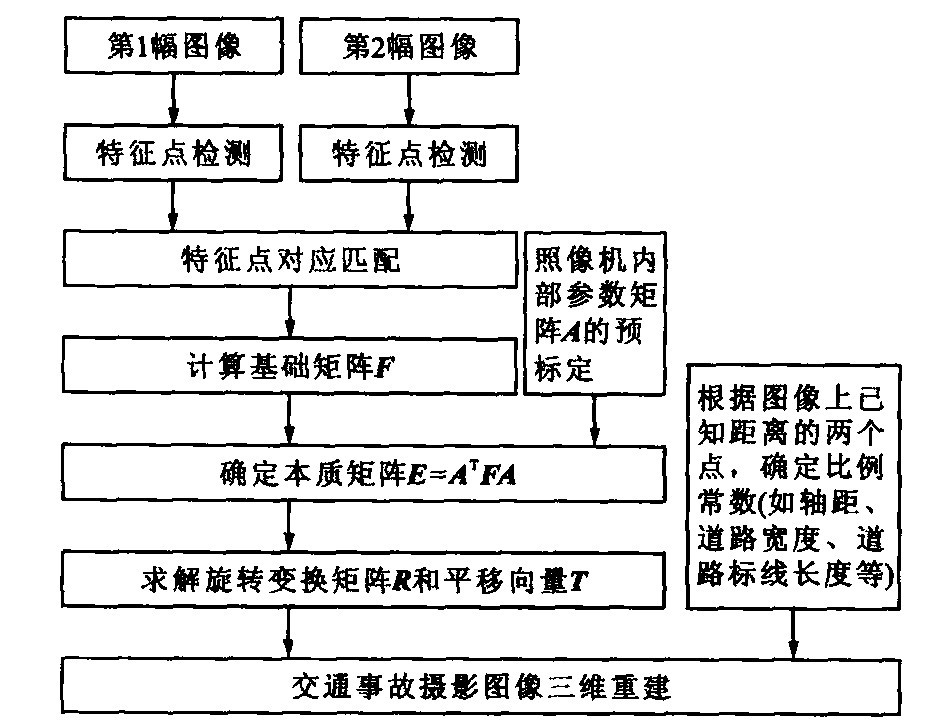
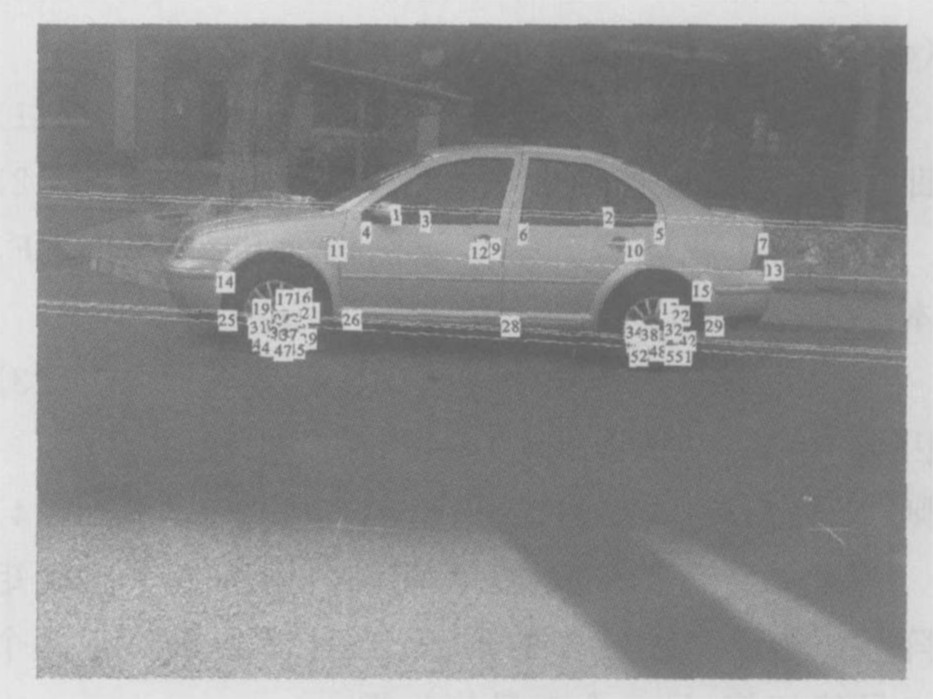
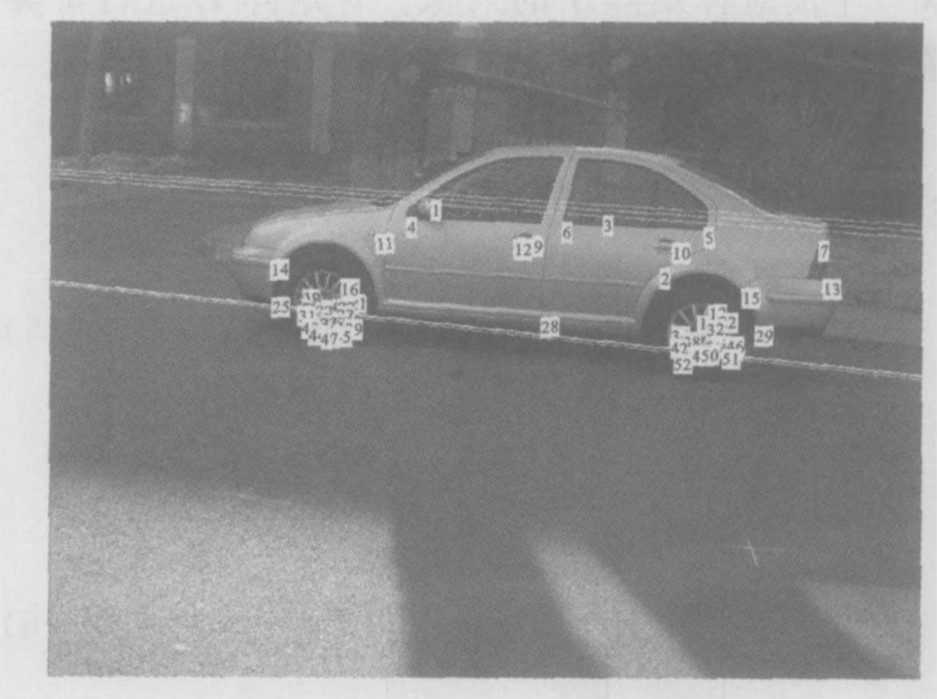
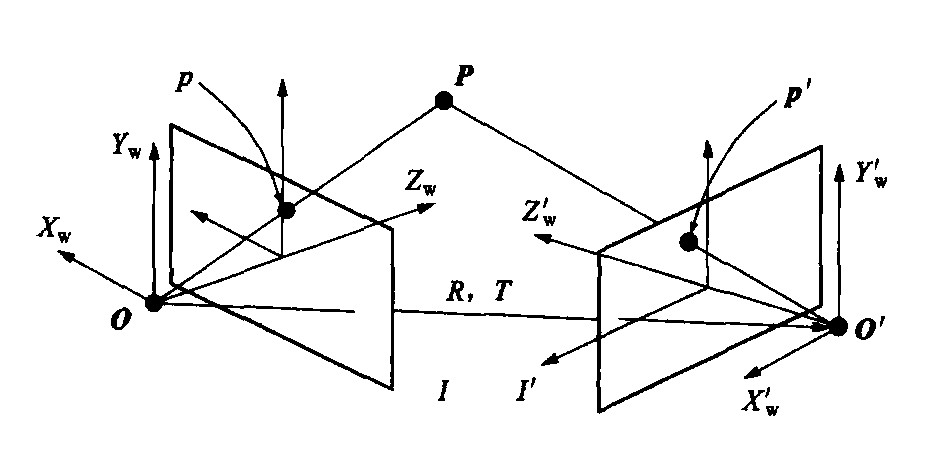
摘要: 为了提高交通事故现场的勘测效率和摄影测量技术的使用方便性, 在基础矩阵估计的基础上, 建立了基于普通数码相机的交通事故摄影图像自标定三维重建模型。模型以特征点对应匹配为基础, 通过基础矩阵计算和本质矩阵分解, 进行道路交通事故摄影图像自标定三维重建。实验结果表明该模型可以在无现场标定参考点设置的情况下, 用普通数码相机对道路交通事故现场进行三维重建, 三维重建结果与实际三维数据仅相差一个比例因子。Abstract: In order to survey traffic accident scene rapidly, a 3-D reconstruction model of traffic accident scene based on self-calibration using general digital camera was explored.The model was based on fundamental matrix, which was estimated by matched feature points, essential matrix can be calculated by it.Traffic accident scene was reconstructed after essential matrix was decomposed.It is proved that the traffic accident scene can be reconstructed without calibration reference points in scene, the difference between the reconstruction result and real 3-D data is only a scale factor.
-
表 1 自标定空间距离重建结果
Table 1. Reconstructed distances based on self-calibration
项目 FR AB FA FB RA RB 实测距离/mm 2 535.00 2 000.00 3 080.00 3 900.00 3 575.00 2 910.00 重建距离 1.809 337 1.656 694 2.054 253 2.531 425 2.656 594 1.814 007 比例 1 401.07 1 207.22 1 499.33 1 540.63 1 345.71 1 604.18  下载: 导出CSV
下载: 导出CSV
表 2 重构距离与实际距离比较
Table 2. Comparison of reconstructed distances and real distances
项目 FR AB FA FB RA RB 实测距离/mm 2 535.00 2 000.00 3 080.00 3 900.00 3 575.00 2 910.00 重建距离/mm 2 535.00 2 321.14 2 878.14 3 546.69 3 722.06 2 541.54 绝对误差 0.00 321.14 201.86 353.31 147.06 368.45 相对误差/% 0.00 16.06 6.55 9.06 4.11 12.66
下载: 导出CSV
-
[1] 乔向明, 徐安, 舒伟. 中国道路交通事故变化趋势预测[J]. 长安大学学报: 自然科学版, 2004, 24 (6): 64-66. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200406016.htmQiao Xiang-ming, Xu An, Shu Wei. Developing tendency forecast of road traffic accident in China[J]. Journal of Chang'an University: Natural Science Edition, 2004, 24 (6): 64-66. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200406016.htm [2] 王丰元. 计算机视觉在道路交通事故现场勘查中的应用研究[D]. 北京: 中国农业大学, 1997. [3] 王丰元, 宇仁德, 杜守旭. 道路交通事故现场摄影测量原理与模型试验[J]. 中国公路学报, 2001, 14 (1): 100-105. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200101022.htmWang Feng-yuan, Yu Ren-de, Du Shou-xu. Photogrammetric principle and model test for road traffic accident scene measurement[J]. China Journal of Highway and Transport, 2001, 14 (1): 100-105. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200101022.htm [4] Xu Hong-guo, Lu Guang-quan. Application of photogrammetry to measurement of traffic accident scene[A]//Proceedings of the Third International Conference on Traffic and Transportation Studies[C]. New York: American Society of Civil Engineers, 2002. [5] Hartley Richard I. Estimation of relative camera positions for uncalibrated cameras[A]//Proceeding of European Conferenceon Computer Vision[C]. Hamburg: Springer-Verlag, 1992. [6] Zhang Zheng-you. Determining the epipolar geometry and its uncertainty[J]. International Journal of Computer Vision, 1998, 27 (2): 161-195. [7] Fusiello A. Uncalibrated euclidean reconstruction[J]. Image and Vision Computing, 2000, 18 (7): 555-563. [8] Tang Chi-keung, Medioni Ge rard, Lee Mi-Suen. N-dimensional tensor voting and application to epipolar geometry estimation[J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 2001, 23 (8): 829-844. doi: 10.1109/34.946987 -

 点击查看大图
点击查看大图
图(4) / 表(2)
计量
- 文章访问数: 318
- HTML全文浏览量: 117
- PDF下载量: 254
- 被引次数: 0
