

-
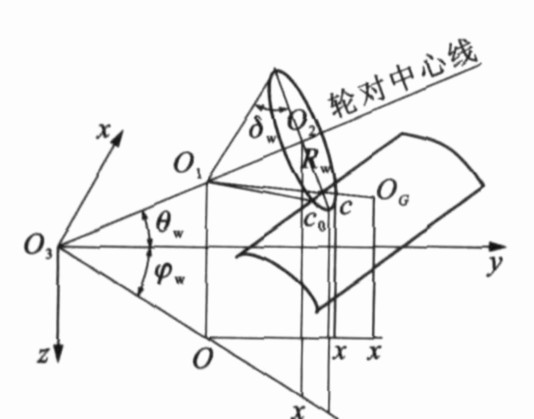
摘要: 为了在车辆-轨道耦合动力学仿真中能更真实反映轮轨接触状态, 利用迹线法原理和轨廓分区法, 在考虑轮对的横移、浮沉、摇头、侧滚和左右钢轨的横移、浮沉、侧滚的条件下, 分别计算轨顶和轨侧区域与车轮的最小轮轨间隙量, 以此来判断轮轨的真实接触状态: 正常的一点接触、非正常的一点接触、两点接触和车轮完全悬浮, 并根据非线性赫兹接触理论分别求得两接触点处的轮轨法向力。轮轨接触关系仿真结果表明根据轮轨接触关系计算方法得出的轮轨接触关系符合车辆在实际线路上的运行状态。Abstract: In order to reflect really wheel-rail contact states, the displacement, bouncing, yaw, roll of wheelsets and the displacement, bouncing, roll of rails were considered, wheel-rail normal forces at two contact points were respectively calculated by nonlinear Hertz contact theory, the minimum gap between rail and wheel was calculated by trochoid method and divided rail outline method, so that wheel-rail real contact states, such as natural one-point contact, nonnatural one-point contact, two-point contact and wheel complete lift, were easily judged.Simulation result of wheel-rail contact relation shows that judged wheel-rail relation accords with real wheel-rail contact relation, the method is feasible.
-
表 1 物理量含义
Table 1. Meanings of physical quantities
RztR RytR RrtR δtminR δfminR 右轮滚动圆半径 右轮踏面横向曲率半径 右钢轨横向曲率半径 轨顶最小间隙 轨侧最小间隙  下载: 导出CSV
下载: 导出CSV
表 2 计算结果
Table 2. Calculation result
算例1 算例2 算例3 输入 yw 0 8 3 φw 0 0 2.0×10-4 θw 0 2.91×10-3 -3.0×10-4 zw 0 0 -1.5 yrL 0 0 -1 zrL 0 0 -1 θrL 0 0 0 yrR 0 0 -1 zrR 0 0 -1 θrR 0 0 1.0×10-5 yrirL 0 0 4 zrirL 0 0 2 yrirR 0 0 -3 zrirR 0 0 -2 结果 RztL 457.9 456.9 457.9 RztR 457.9 461.7 461.1 RytL -500.0 -500.0 -500.0 RytR -500.0 -100.0 -100.02 RrtL 300.0 300.0 80.0 RrtR 80.0 13.0 13.0 δtminR -7.3×10-7 2.0 -2.2 δfminR -7.3×10-7 -2.6 -2.2 注: 长度单位为mm; 角度单位为rad。
下载: 导出CSV
-
[1] 孙翔, 金鼎昌. 磨耗形踏面与钢轨的两点接触[J]. 西南交通大学学报, 1985, 19(2): 45-57. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT198502004.htmSun Xiang, Jin Ding-chang. Two point contact of wear-type tread/rail[J]. Journal of Southwest Jiaotong University, 1985, 19(2): 45-57. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT198502004.htm [2] 严隽耄. 具有任意轮廓形状的轮轨空间几何参数的计算[J]. 西南交通大学学报, 1983, 17(3): 40-45.Yan Jun-mao. Computation of solid geometry parameter of wheel/rail contact with optional contour[J]. Journal of Southwest Jiaotong University, 1983, 17(3): 40-45. (in Chinese) [3] 王开文. 车轮接触点迹线及轮轨接触点几何参数的计算[J]. 西南交通大学学报, 1984, 18(1): 89-99.Wang Kai-wen. Trochoid of wheel contact point and calculation on geometry parameter of wheel/rail contact point[J]. Journal of Southwest Jiaotong University, 1984, 18(1): 89-99. (in Chinese) [4] 瞿婉明. 车辆-轨道耦合动力学[M]. 北京: 中国铁道出版社, 2001. [5] 陈果. 车辆-轨道耦合系统随机振动分析[D]. 成都: 西南交通大学, 2000. [6] 金学松, 刘启跃. 轮轨摩擦学[M]. 北京: 中国铁道出版社, 2004. [7] Chen Guo, Zhai Wan-ming. A new wheel/rail spatially dynamic coupling model and verification[J]. Vehicle System Dynamics, 2004, 41(4): 301-322. doi: 10.1080/00423110412331315178 [8] Zhai Wan-ming, Cai Cheng-biao, GuoSi-zhang. Coupling model of vehicle and lateral vehicle/track interactions[J]. Vehicle System Dynamics, 1996, 26(1): 61-79. doi: 10.1080/00423119608969302 [9] 肖新标, 金学松, 温泽峰. 钢轨扣件失效对列车动态脱轨的影响[J]. 交通运输工程学报, 2006, 6(1): 10-15. http://transport.chd.edu.cn/article/id/200601002Xiao Xin-biao, Jin Xue-song, Wen Ze-feng. Influence of rail fastener failure on vehicle dynamic derailment[J]. Journal of Traffic and Transportation Engineering, 2006, 6(1): 10-15. (in Chinese) http://transport.chd.edu.cn/article/id/200601002 [10] 金学松, 温泽峰, 王开云. 钢轨磨耗型波磨计算模型与数值方法[J]. 交通运输工程学报, 2005, 5(2): 12-17. http://transport.chd.edu.cn/article/id/200502004Jin Xue-song, Wen Ze-feng, Wang Kai-yun. Theoretical model and numerical method of rail corrugation[J]. Journal of Traffic and Transportation Engineering, 2005, 5(2): 12-17. (in Chinese) http://transport.chd.edu.cn/article/id/200502004 [11] 任尊松. 车辆-道岔系统动力学研究[D]. 成都: 西南交通大学, 2000. -


 点击查看大图
点击查看大图
图(4) / 表(2)
计量
- 文章访问数: 530
- HTML全文浏览量: 159
- PDF下载量: 375
- 被引次数: 0
