

Auto-leveling control system of paver based on CAN bus
Article Text (Baidu Translation)
-
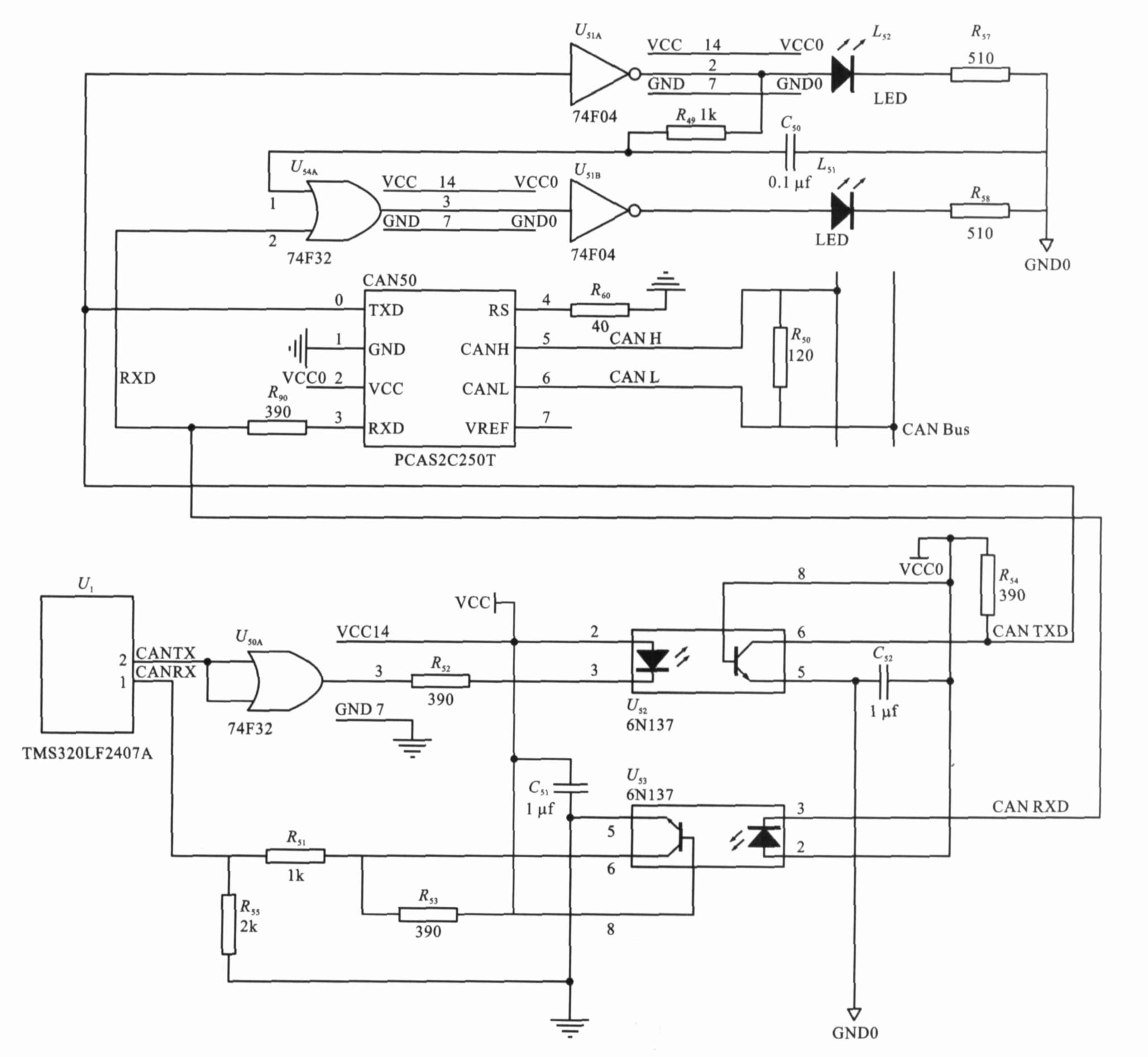
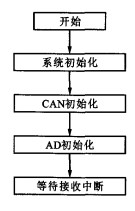
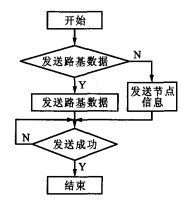
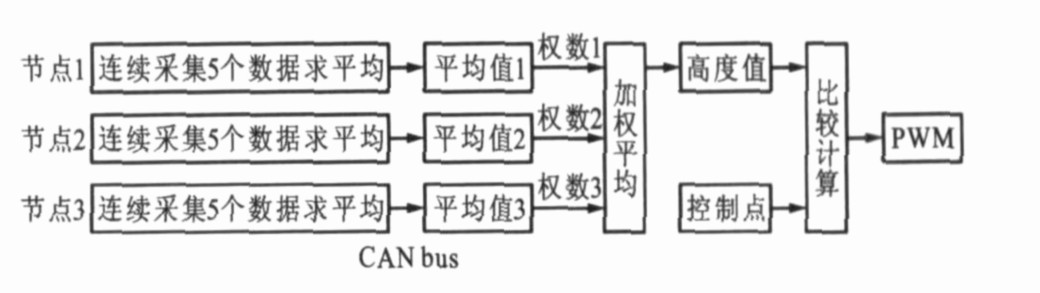
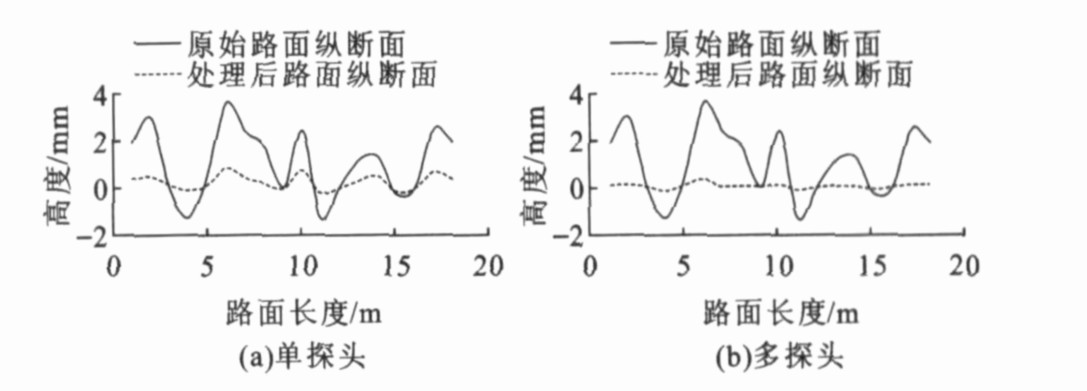
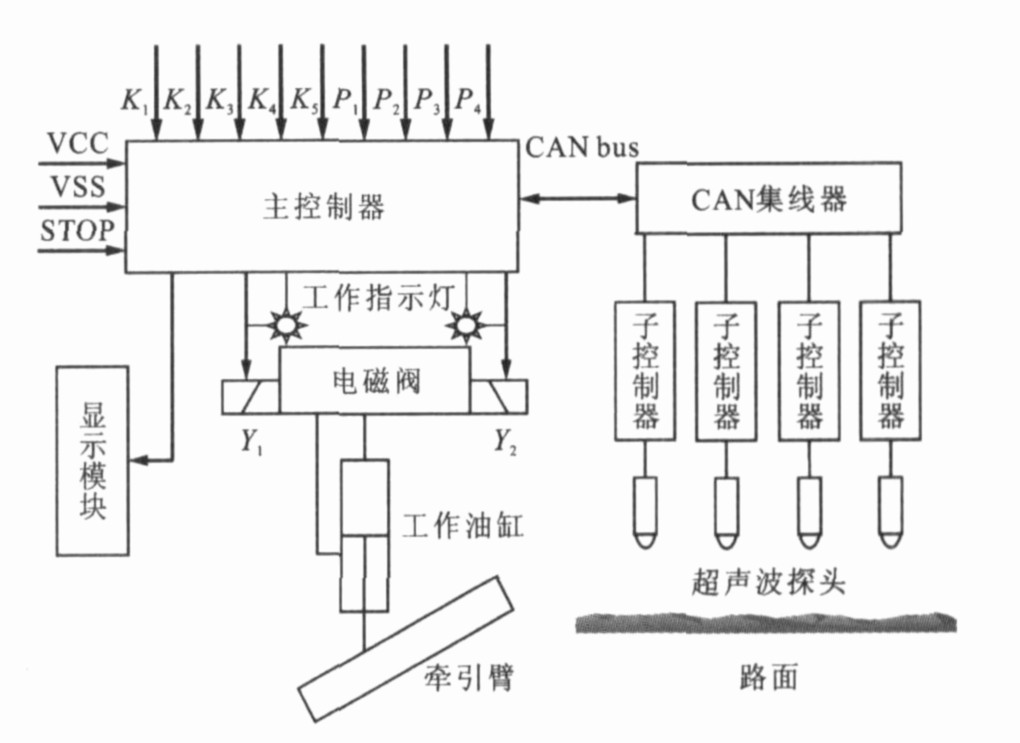
摘要: 为提高路面摊铺平整度, 研究了一种基于CAN总线的多点(多探头) 非接触式摊铺机自动找平系统, 给出了系统总体结构、CAN节点的硬件电路及软件主要流程, 采用多重滤波方法进行数据处理, 滤除摊铺机作业过程中偶然因素造成的跳点数据, 提高系统的抗干扰性能。采用该找平系统对单探头和多探头找平方式进行了对比试验, 结果表明多探头方式找平效果优于单探头方式; 与接触式自动找平系统对比实验表明采用该找平系统中面层平整度平均值较接触式提高了3.2%, 上面层提高了7.8%。Abstract: In order to improve the smoothness of road paving, a multi-point (multi-probe) non-touching auto-leveling control system based on CAN (control area network) bus was developed, the structure of the system, the circuit of CAN node and the main flow charts of CAN node software were given, multi-filtering algorithm was employed to eliminate the wild data during road paving process, so that the disturbance attenuation performance of the system was improved.Comparison test result shows that the leveling effect of multi-probe is more effective than single-probe.Compared with touching auto-leveling system, the paving smoothness of intermediate surface layer is increased by 3.2%, and upper surface layer by 7.8% with the system.
-
Key words:
- road engineering /
- road paver /
- auto-leveling control system /
- CAN bus
-
表 1 实验数据
Table 1. Experimental data
路面层 实验对象 路面平整度均值(每一数据为60个检测点的平均值) /mm 中面层 接触式 0.83 0.54 0.82 1.07 0.90 0.67 0.58 0.60 0.87 0.94 0.70 0.71 0.66 0.61 非接触式 0.72 0.52 0.85 0.70 0.83 0.59 0.87 0.70 0.78 0.86 0.64 0.64 0.65 0.81 上面层 接触式 0.63 0.64 0.54 0.53 0.54 0.87 0.58 0.62 0.56 0.72 0.70 0.60 0.54 0.64 非接触式 0.55 0.57 0.66 0.51 0.58 0.56 0.60 0.55 0.66 0.55 0.52 0.60 0.55 0.57  下载: 导出CSV
下载: 导出CSV
-
[1] 吴成富, 焦生杰, 惠纪庄. 摊铺机自动找平控制系统研究[J]. 筑路机械与施工机械化, 2004, 21(8): 15-17. doi: 10.3969/j.issn.1000-033X.2004.08.006Wu Cheng-fu, Jiao Sheng-jie, Hui Ji-zhuang. Research on auto leveling control system of paver[J]. Road Machinery& Construction Mechanization, 2004, 21(8): 15-17. (in Chinese) doi: 10.3969/j.issn.1000-033X.2004.08.006 [2] 焦生杰, 余亮, 徐守国. 摊铺机声控找平系统原理[J]. 筑路机械与施工机械化, 2000, 17(5): 7-9. doi: 10.3969/j.issn.1000-033X.2000.05.003Jiao Sheng-jie, Yu Liang, Xu Shou-guo. Principle of auto-leveling system for paver with sonic control[J]. Road Machinery& Construction Mechanization, 2000, 17(5): 7-9. (in Chinese) doi: 10.3969/j.issn.1000-033X.2000.05.003 [3] 庄月明. 非接触式找平系统在沥青路面摊铺中的应用及研究[J]. 筑路机械与施工机械化, 2005, 22(5): 8-11. doi: 10.3969/j.issn.1000-033X.2005.05.003Zhuang Yue-ming. Application and research of non-contacting levelling system in asphalt pavement construction[J]. Road Machinery& Construction Mechanization, 2005, 22(5): 8-11. (in Chinese) doi: 10.3969/j.issn.1000-033X.2005.05.003 [4] 孙军, 庄月明, 黄晓明. 非接触式自动找平系统在沥青路面摊铺中的应用[J]. 公路, 2002, 47(6): 48-50. doi: 10.3969/j.issn.1002-0268.2002.06.014Sun Jun, Zhuang Yue-ming, Huang Xiao-ming. Application of non-touching auto-leveling system in the paving of asphalt road[J]. Highway, 2002, 47(6): 48-50. (in Chinese) doi: 10.3969/j.issn.1002-0268.2002.06.014 [5] 焦生杰, 唐相伟, 刘桦. 智能化摊铺机的发展与现状[J]. 筑路机械与施工机械化, 2004, 21(2): 6-9. doi: 10.3969/j.issn.1000-033X.2004.02.002Jiao Sheng-jie, Tang Xiang-wei, Liu Hua. Development and status quo of intelligentized paver[J]. Road Machinery & Construction Mechanization, 2004, 21(2): 6-9. (in Chinese) doi: 10.3969/j.issn.1000-033X.2004.02.002 [6] 方俊英, 宋永刚. RSS一种全新的摊铺机自动化找平系统[J]. 筑路机械与施工机械化, 2002, 19(1): 14-15. doi: 10.3969/j.issn.1000-033X.2002.01.006Fang Jun-ying, Song Yong-gang. RSS a new auto-leveling system for paver[J]. Road Machinery& Construction Mechanization, 2002, 19(1): 14-15. (in Chinese) doi: 10.3969/j.issn.1000-033X.2002.01.006 [7] 惠纪庄, 吴成富, 焦生杰. 基于DSP芯片的接触式自动找平控制器[J]. 长安大学学报: 自然科学版, 2005, 25(2): 90-94. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL20050200K.htmHui Ji-zhuang, Wu Cheng-fu, Jiao Sheng-jie. Touched automatic controller for elevation based on DSP[J]. Journal of Chang'an University: Natural Science Edition, 2005, 25(2): 90-94. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL20050200K.htm [8] 朱正礼, 殷承良, 张建武. 混合动力车中CAN总线系统的应用[J]. 交通运输工程学报, 2004, 4(3): 90-94. http://transport.chd.edu.cn/article/id/200403021Zhu Zheng-li, Yin Cheng-liang, Zhang Jian-wu. Application of CAN bus system in hybrid electric vehicle[J]. Journal of Traffic and Transportation Engineering, 2004, 4(3): 90-94. (in Chinese) http://transport.chd.edu.cn/article/id/200403021 [9] 黄运生, 汤勇, 吴运新, 等. CAN总线通信技术在LTU90A智能摊铺机中的应用[J]. 中南工业大学学报: 自然科学版, 2003, 34(5): 532-533. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD200305017.htmHuang Yun-sheng, Tang Yong, Wu Yun-xin, et al. Application of CAN bus communication technology in intelligent paver[J]. Journal of Central South University of Technology: Natural Science Edition, 2003, 34(5): 532-533. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD200305017.htm [10] 余张国, 李磊民, 聂诗良, 等.一种基于CAN总线的工程机械通用控制方案[J], 西南科技大学学报, 2004, 19(2): 19-21. doi: 10.3969/j.issn.1671-8755.2004.02.005Yu Zhang-guo, Li Lei-min, Nie Shi-liang, et al. A general control of engineering machines based on CAN bus[J]. Journal of Southwest University of Science and Technology, 2004, 19(2): 19-21. (in Chinese) doi: 10.3969/j.issn.1671-8755.2004.02.005 [11] 戚建, 陈正祥, 刘国良. CAN总线技术在LTU90A摊铺机控制系统中的应用[J]. 工程机械, 2003, 34(5): 5-7. https://www.cnki.com.cn/Article/CJFDTOTAL-GCJA200305001.htmQi Jian, Chen Zheng-xiang, Liu Guo-liang. Application of CAN bus technology to control system of LTU90A paver[J]. Construction Machinery and Equipment, 2003, 34(5): 5-7. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GCJA200305001.htm -


图(7) / 表(1)
计量
- 文章访问数: 677
- HTML全文浏览量: 198
- PDF下载量: 217
- 被引次数: 0
