

Integrated robust control system of rudder and fin
Article Text (Baidu Translation)
-
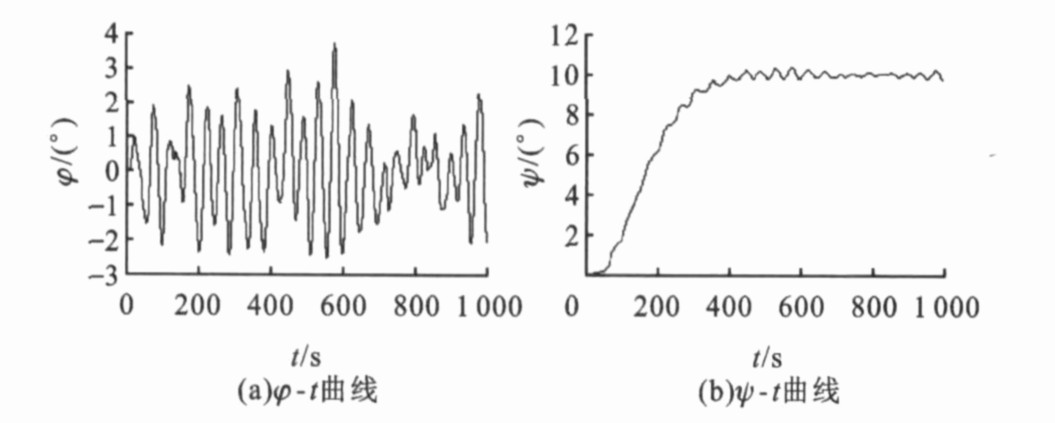
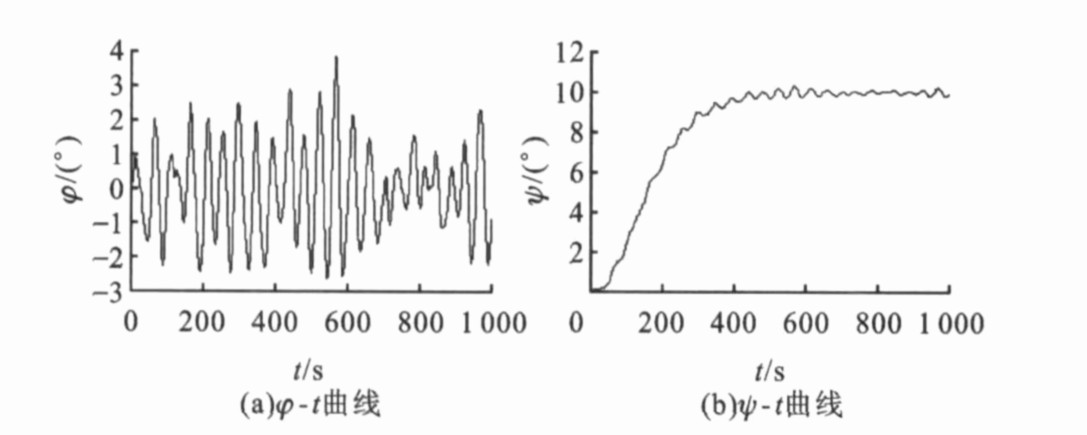
摘要: 为了在保持航向的同时, 达到较好的减摇效果, 提高船舶航行的安全性和舒适度, 设计一种舵鳍联合控制系统。根据先验知识, 用具有工程意义的带宽频率、高频渐近线斜率、最大奇异值和频谱峰值4个参数构造了闭环系统的传递函数阵, 给出了多输入多输出系统的闭环增益成形算法, 将之应用于舵鳍联合减摇的控制中, 运用Simulink工具箱得到仿真曲线。仿真结果表明所设计的控制系统在保证航向控制的同时, 船舶横摇平均在±2°左右, 最大4°, 达到了较好的减摇效果。Abstract: In order to improve the safety and comfort of ship navigation, a kind of rudder-fin joint control system was designed to make ship have good course-keeping and roll-damping effects, a closed-loop gain shaping algorithm for multi-input multi-output (MIMO) system was presented by constructing the transfer function matrix of the closed-loop system according to prior knowledge, four parameters with engineering meaning, such as bandwidth frequency, high frequency asymptote slope, the largest singular value and the peak value of closed-loop frequency spectrum, were used to construct the matrix.The designed algorithm was applied to a rudder-fin joint control system, its simulating curves were obtained using Simulink.Simulation results show that the controll system has well control performances on course-keeping and roll stabilization, the average roll angle range is from +2° to-2°, and the maximum roll angle is 4°.
-
[1] 张博实, 王科俊, 罗姣妍. 利用Matlab进行船舶舵鳍联合减摇智能控制系统设计与仿真[J]. 计算机仿真, 2001, 18(2): 76-79. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ200102023.htmZhang Bo-shi, Wang Ke-jun, Luo Jiao-yan. Simulation and design of ship roll stabilization using integrated control of rudder and fin in Matlab environment[J]. Computer Simulation, 2001, 18(2): 76-79. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ200102023.htm [2] 于萍, 刘胜. 基于H∞设计法的非线性舵鳍联合控制系统仿真研究[J]. 系统仿真学报, 2002, 14(8): 1040-1044. doi: 10.3969/j.issn.1004-731X.2002.08.020Yu Ping, Liu Sheng. Simulation on nonlinear rudder/fin joint control based on H∞control theory[J]. Journal of System Simulation, 2002, 14(8): 1040-1044. (in Chinese) doi: 10.3969/j.issn.1004-731X.2002.08.020 [3] 张显库, 金一丞. 控制系统建模与数字仿真[M]. 大连: 大连海事大学出版社, 2004. [4] 贾欣乐, 张显库. 船舶运动智能控制与H∞鲁棒控制[M]. 大连: 大连海事大学出版社, 2002. [5] Zhang Xian-ku, Jia Xin-le. Simplification of H∞mixed sensitivity algorithm and its application[J]. Automatic Control and Computer Sciences, 2002, 36(3): 28-33. [6] 张显库, 贾欣乐. 求PID参数新方法[J]. 系统工程与电子技术, 2000, 22(8): 4-5. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200008001.htmZhang Xian-ku, Jia Xin-le. A new method for solving PID parameters[J]. Systems Engineering and Electronics, 2000, 22(8): 4-5. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200008001.htm [7] 张显库, 贾欣乐. 用闭环增益成形算法的精馏塔鲁棒控制[J]. 系统工程与电子技术, 2001, 23(5): 15-18. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200105005.htmZhang Xian-ku, Jia Xin-le. Robust control of a high purity distillation column using closed-loop gain shaping algorithm[J]. Systems Engineering and Electronics, 2001, 23(5): 15-18. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200105005.htm [8] 张显库, 张丽坤, 贾欣乐. 非方阵被控对象闭环增益成形算法及其应用[J]. 大连海事大学学报, 2001, 27(2): 63-67. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS200102014.htmZhang Xian-ku, Zhang Li-kun, Jia Xin-le. Closed-loop gain shaping algorithm with unsquare matrix plant and its application[J]. Journal of Dalian Maritime University, 2001, 27(2): 63-67. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS200102014.htm [9] 张显库, 郭晨, 杜佳璐. 船舶航向不对称信息理论与非线性逆推鲁棒控制算法[J]. 交通运输工程学报, 2006, 6(2): 47-50. http://transport.chd.edu.cn/article/id/200602011Zhang Xian-ku, Guo Chen, Du Jia-lu. Asymmetric information theory and nonlinear backstepping robust control algorithm of ship navigation[J]. Journal of Traffic and Transportation Engineering, 2006, 6(2): 47-50. (in Chinese) http://transport.chd.edu.cn/article/id/200602011 [10] 张显库, 肖惟楚, 郭晨. 船舶进出港低速航向保持[J]. 交通运输工程学报, 2005, 5(4): 77-81. http://transport.chd.edu.cn/article/id/200504016Zhang Xian-ku, Xiao Wei-chu, Guo Chen. Course-keeping of inward-and-outward low speed ship[J]. Journal of Traffic and Transportation Engineering, 2005, 5(4): 77-81. (in Chinese) http://transport.chd.edu.cn/article/id/200504016 -

 下载:
下载:
 点击查看大图
点击查看大图
图(2)
计量
- 文章访问数: 405
- HTML全文浏览量: 162
- PDF下载量: 227
- 被引次数: 0
