

-
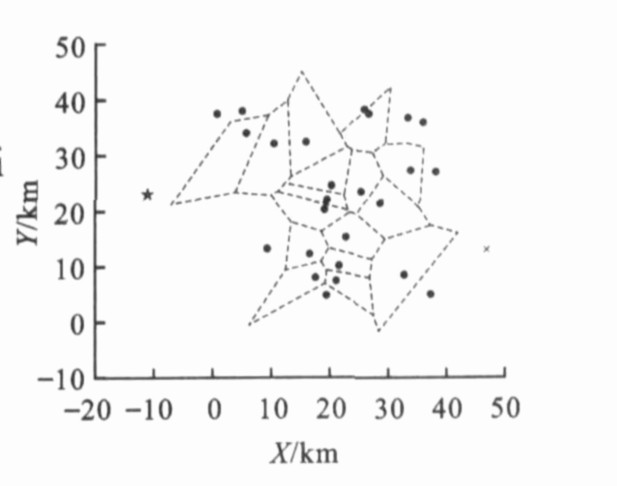
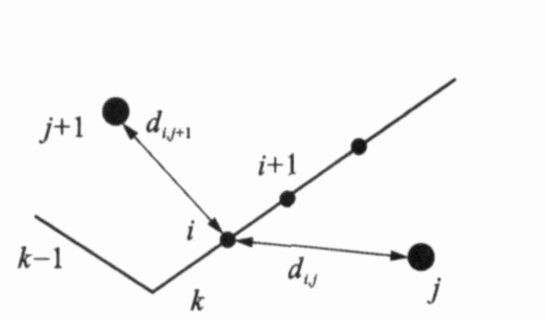
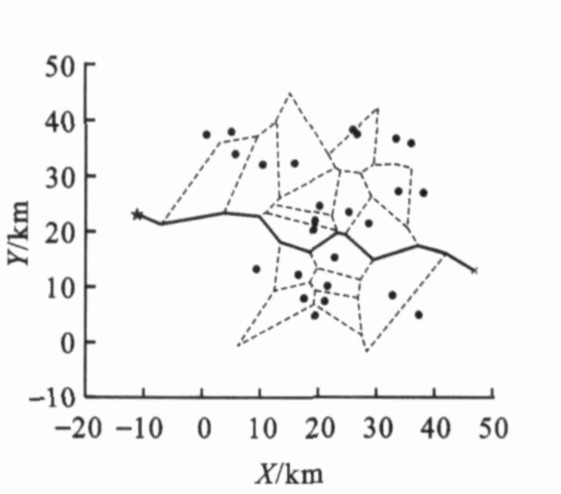
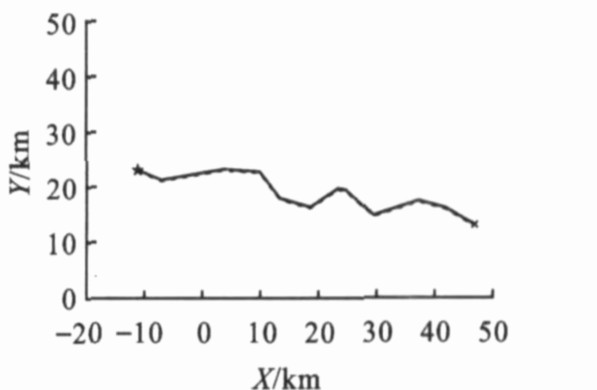
摘要: 为了找出在某些约束条件下的最优飞行路径, 提出了一种基于Voronoi图的战术飞行路径规划算法, 建立了威胁代价函数, 采用分解策略, 首先生成一条由若干直线段连接的参考航路, 然后利用B样条函数对规划的参考航路进行动态修正, 用Matlab进行了仿真验证。仿真结果表明了路径规则算法是有效的, 修正后的路径避免了带有尖角的不可飞路径, 满足最小飞行半径与动力约束。Abstract: In order to find optimal flight path with certain constraints, a trajectory planning algorithm of tactics flight path based on Voronoi diagram was presented, the function of threat cost was formulated, reference flight path consisting of a series of beeline segments was generated by decomposition strategy, and real-time planning flight path was optimized by B spline, its simulation test was done by Matlab.Simulation result shows that the algorithm is feasible, the optimal flight path satisfies flight dynamic constraints and minimal flight radius, avoids unfeasible flight routine with sharp angles.
-
Key words:
- traffic planning /
- path planning /
- trajectory modifying /
- Voronoi diagram
-
[1] Al Hasan S, Vachtsevanos G. Intelligent route planning for fast autonomous vehicles operating in a large natural terrain[J]. Robotics and Autonomous Systems, 2002, 40(1): 1-24. doi: 10.1016/S0921-8890(02)00208-7 [2] 周德云, 李峰, 蒲小勃. 基于遗传算法的飞机战术飞行动作决策[J]. 西北工业大学学报, 2002, 20(1): 109-112. https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD200201034.htmZhou De-yun, Li Feng, Pu Xiao-bo. On improving tactical planning in air combat in P.R. China with genetic algorithm[J]. Journal of Northwestern Polytechnical University, 2002, 20(1): 109-112. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD200201034.htm [3] Kallgren L. Real-time replanning of mission routes based upon threats[D]. Sweden: Linkoping University, 2001. [4] 夏洁, 高金源. 满足战场需求的实时飞行路径规划[J]. 北京航空航天大学学报, 2004, 30(2): 95-99. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK200402000.htmXia Jie, Gao Jin-yuan. Real-time flight path planning for combat mission[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(2): 95-99. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK200402000.htm [5] 高晖, 陈欣, 夏云程. 无人机航路规划研究[J]. 南京航空航天大学学报, 2001, 33(2): 135-138. https://www.cnki.com.cn/Article/CJFDTOTAL-NJHY202102010.htmGao Hui, Chen Xin, Xia Yun-cheng. Study on trajectory plan for unmanned aircraft vehicle[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2001, 33(2): 135-138. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NJHY202102010.htm [6] 彭瑛, 胡明华, 张颖. 动态航迹推测方法[J]. 交通运输工程学报, 2005, 5(1): 61-65. http://transport.chd.edu.cn/article/id/200501015Peng Ying, Hu Ming-hua, Zhang Ying. Conjecture method of dynamic flying track[J]. Journal of Traffic and Transportation Engineering, 2005, 5(1): 61-65. (in Chinese) http://transport.chd.edu.cn/article/id/200501015 [7] 胡昱. 飞机战术飞行轨迹优化方法及其实现研究[D]. 北京: 北京航空航天大学, 1999. [8] 普霍帕拉塔F P, 沙莫斯M I. 计算几何导论[M]. 庄心谷, 译. 北京: 科学出版社, 1992. [9] 周锐, 成晓静, 陈宗基. 战术任务规划系统研究[J]. 控制与决策, 2004, 19(4): 441-447. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200404018.htmZhou Rui, Cheng Xiao-jing, Chen Zong-ji. Tactical mission planning systems for modern fighter plane[J]. Control and Decision, 2004, 19(4): 441-447. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200404018.htm [10] 叔检, 戴家幸. 线性规划与网络技术[M]. 上海: 华东化工学院出版社, 1989. -

 下载:
下载:
 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 493
- HTML全文浏览量: 225
- PDF下载量: 465
- 被引次数: 0
